网站地图
网站地图

 微信公众平台
微信公众平台 Email alert
Email alert RSS
RSS2024年 48卷 第5期
显示方式:
 [摘要]
[摘要] [PDF 272KB]
[PDF 272KB]
2024, 48(5): 620-627.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.002
 [HTML全文]
[HTML全文]
摘要:
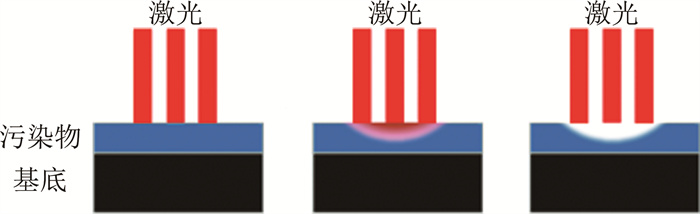
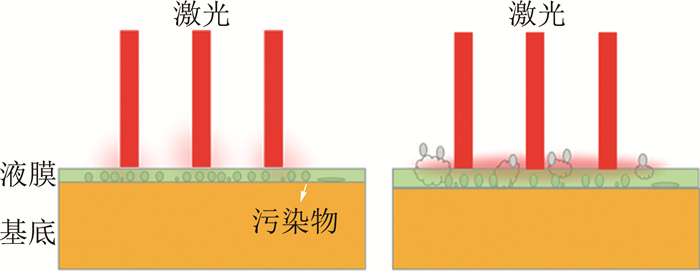
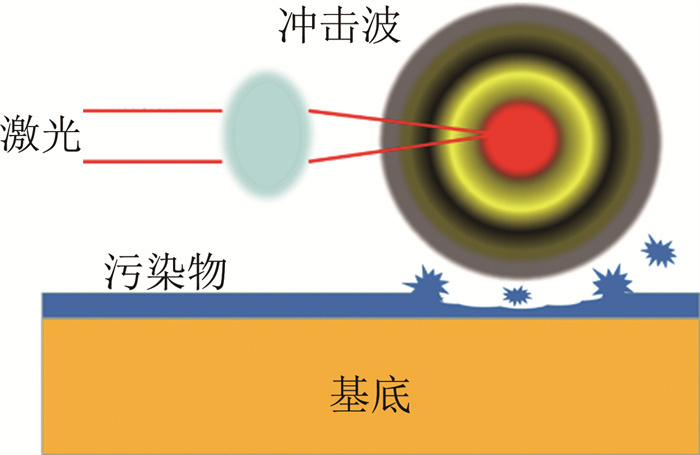
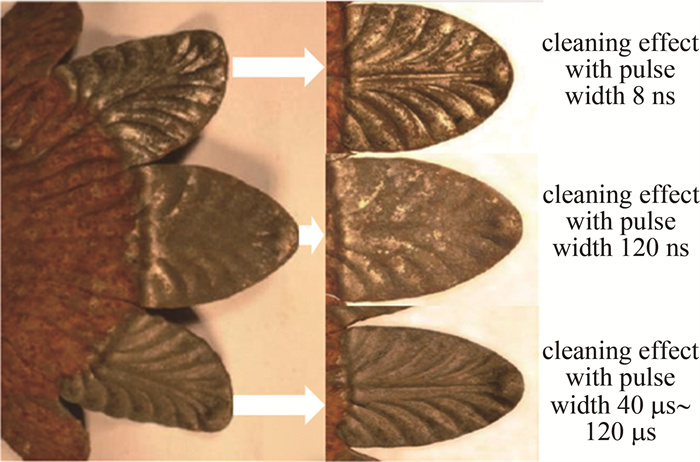
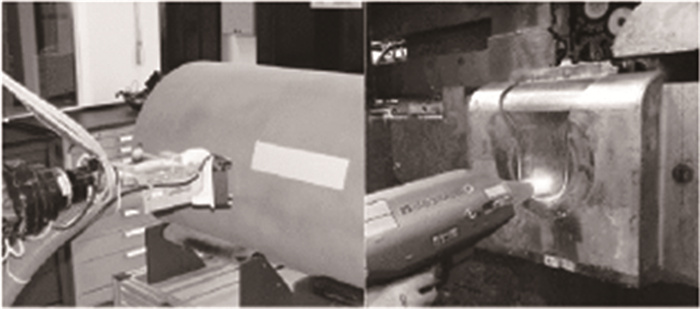
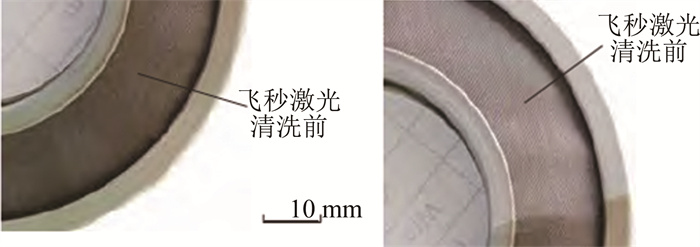
激光清洗技术是一种利用激光与物质相互作用的清洗新技术,具有操作简单、精准度高、低损伤、低排放和环保的优点,已被研究人员广泛地关注和研究,取得了很多重要研究成果,极具应用前景。首先根据激光清洗技术的分类(干式、湿式激光清洗和激光等离子体清洗),简述了激光清洗技术的发展和机理,并对比分析了各种清洗方式的差异和优缺点,为研究人员的理解和选择提供支持;在此基础上,重点综述了激光清洗技术在维修保障中的研究应用现状。目前仅有表面除漆技术在国外飞机的维修保障中得到实际应用;表面除锈技术在国内外舰船材质表面实施应用得到了可靠验证,且国外已进行了实际应用的探索;表面除油污积碳技术在国内外均进行了零部件的探索性实验研究,距离成熟应用差距很多;而表面的其它污染物,主要包括海洋微生物污垢、霉菌以及损伤功能性涂层等。最后总结了激光清洗技术的研究发展方向,并对未来趋势进行了展望。
激光清洗技术是一种利用激光与物质相互作用的清洗新技术,具有操作简单、精准度高、低损伤、低排放和环保的优点,已被研究人员广泛地关注和研究,取得了很多重要研究成果,极具应用前景。首先根据激光清洗技术的分类(干式、湿式激光清洗和激光等离子体清洗),简述了激光清洗技术的发展和机理,并对比分析了各种清洗方式的差异和优缺点,为研究人员的理解和选择提供支持;在此基础上,重点综述了激光清洗技术在维修保障中的研究应用现状。目前仅有表面除漆技术在国外飞机的维修保障中得到实际应用;表面除锈技术在国内外舰船材质表面实施应用得到了可靠验证,且国外已进行了实际应用的探索;表面除油污积碳技术在国内外均进行了零部件的探索性实验研究,距离成熟应用差距很多;而表面的其它污染物,主要包括海洋微生物污垢、霉菌以及损伤功能性涂层等。最后总结了激光清洗技术的研究发展方向,并对未来趋势进行了展望。

2024, 48(5): 726-733.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.017
摘要:
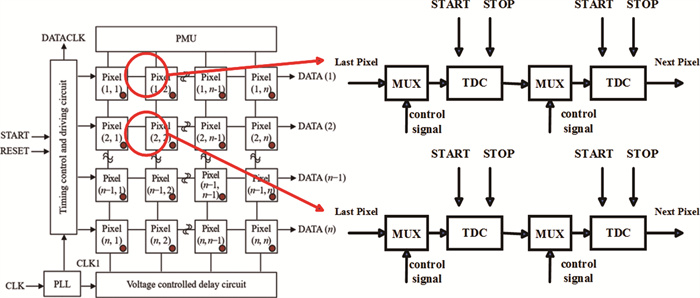
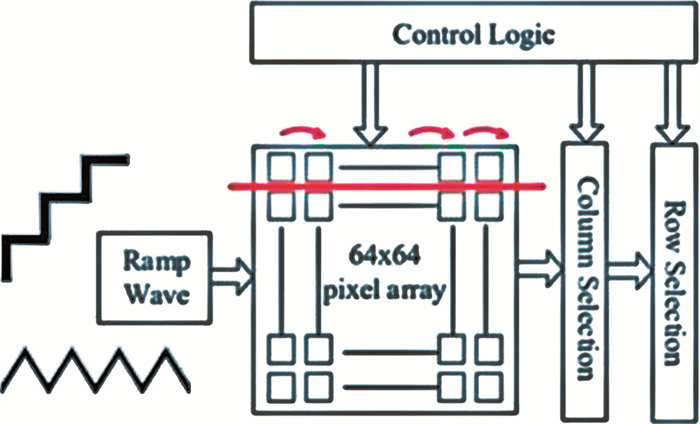
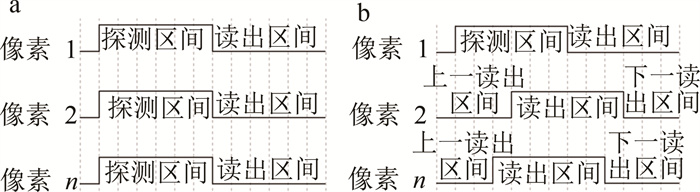
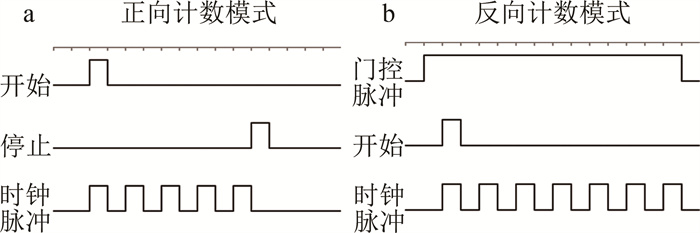
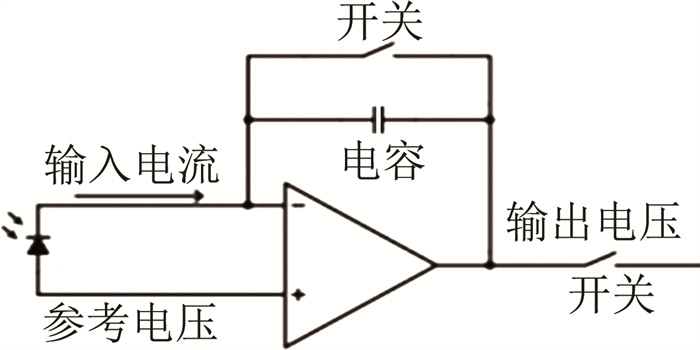
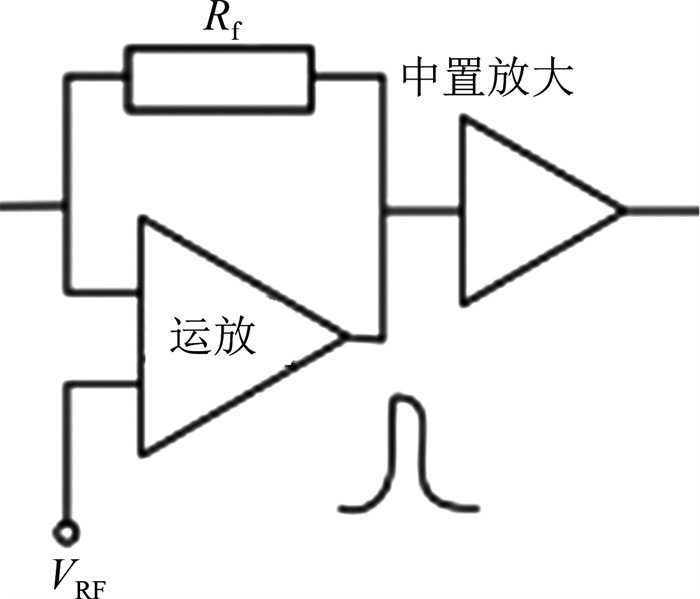
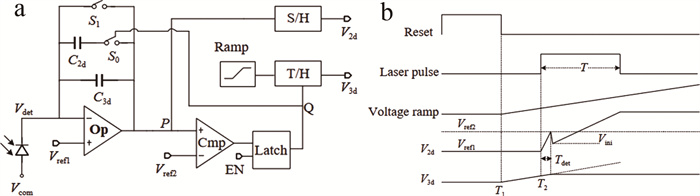
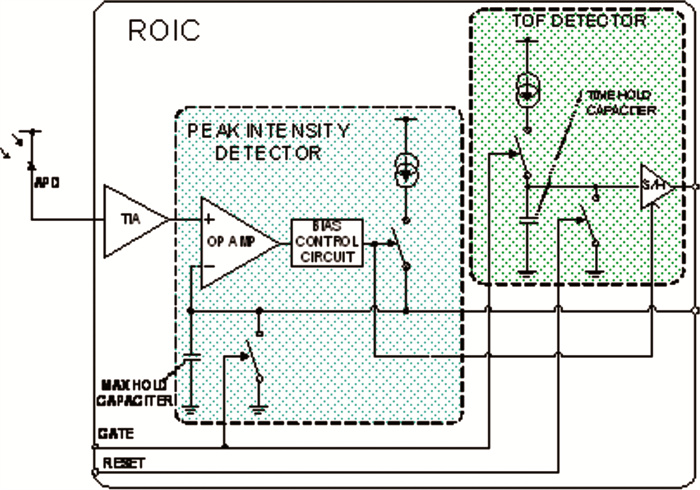
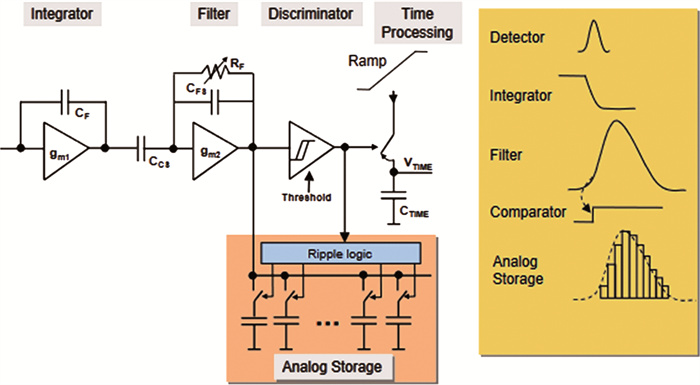
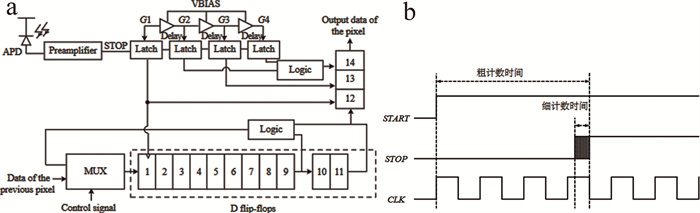
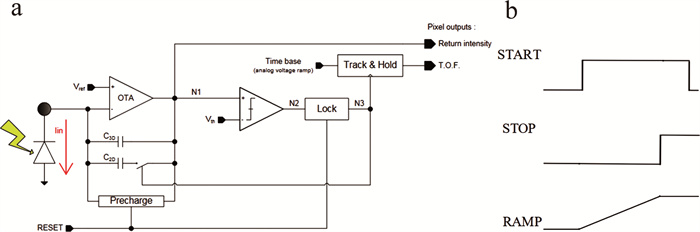
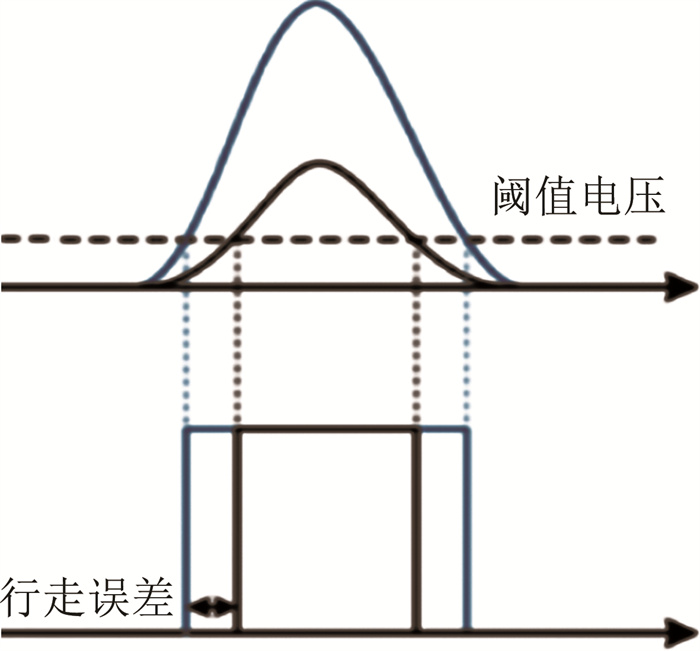
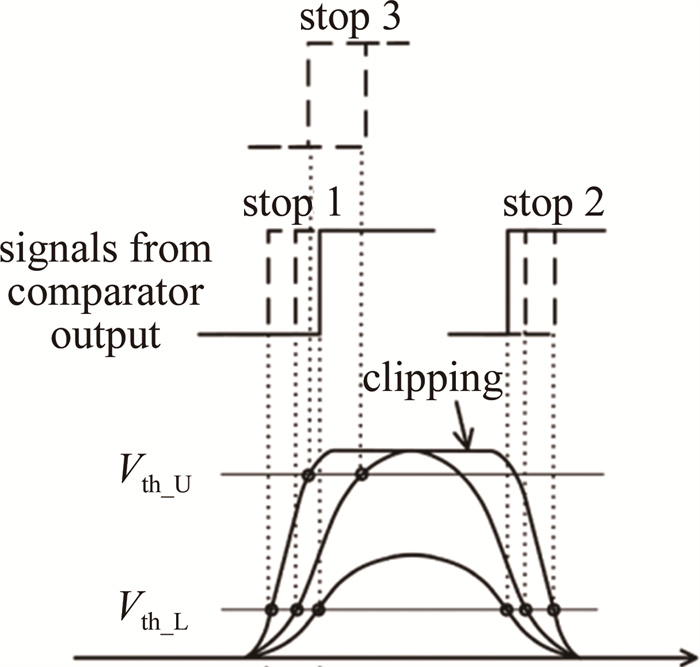
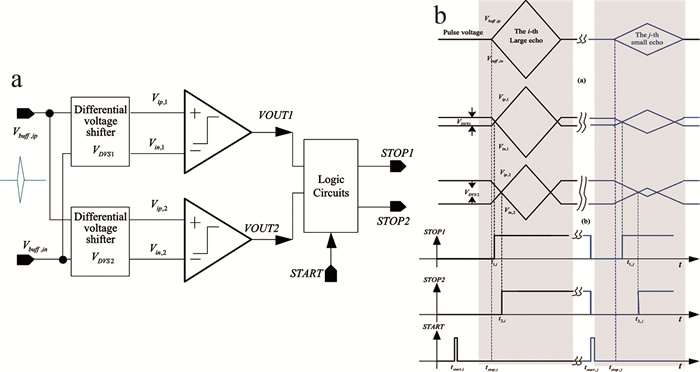
激光焦平面探测器是一种新型的光电成像器件,它利用半导体内部载流子的雪崩倍增效应实现高速、高灵敏度、纳秒级时间分辨探测,用于凝视型激光3维成像系统。探测器主要分为线性和盖革两大类,其中线性模式探测器具有响应速度快、无死时间和后脉冲、可实现单脉冲瞬时成像等优点。首先介绍了在不同应用场景下,线性模式焦平面读出电路的两种架构并简述其原理,然后阐述像素单元的关键电路模块,比较了其优缺点,最后分析了两种减小行走误差的双阈值时刻鉴别方法。为相关领域的研究者提供了一些有益的参考和借鉴。
激光焦平面探测器是一种新型的光电成像器件,它利用半导体内部载流子的雪崩倍增效应实现高速、高灵敏度、纳秒级时间分辨探测,用于凝视型激光3维成像系统。探测器主要分为线性和盖革两大类,其中线性模式探测器具有响应速度快、无死时间和后脉冲、可实现单脉冲瞬时成像等优点。首先介绍了在不同应用场景下,线性模式焦平面读出电路的两种架构并简述其原理,然后阐述像素单元的关键电路模块,比较了其优缺点,最后分析了两种减小行走误差的双阈值时刻鉴别方法。为相关领域的研究者提供了一些有益的参考和借鉴。



2024, 48(5): 665-670.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.008
摘要:
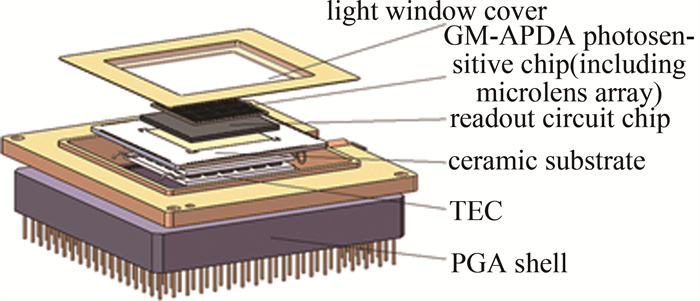
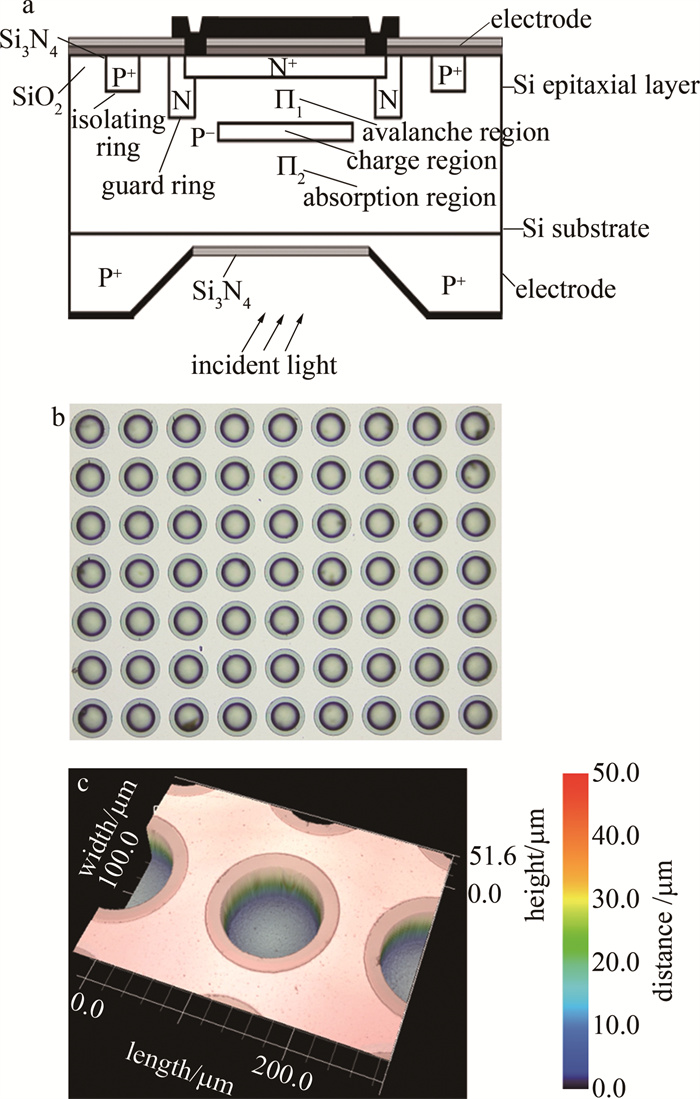
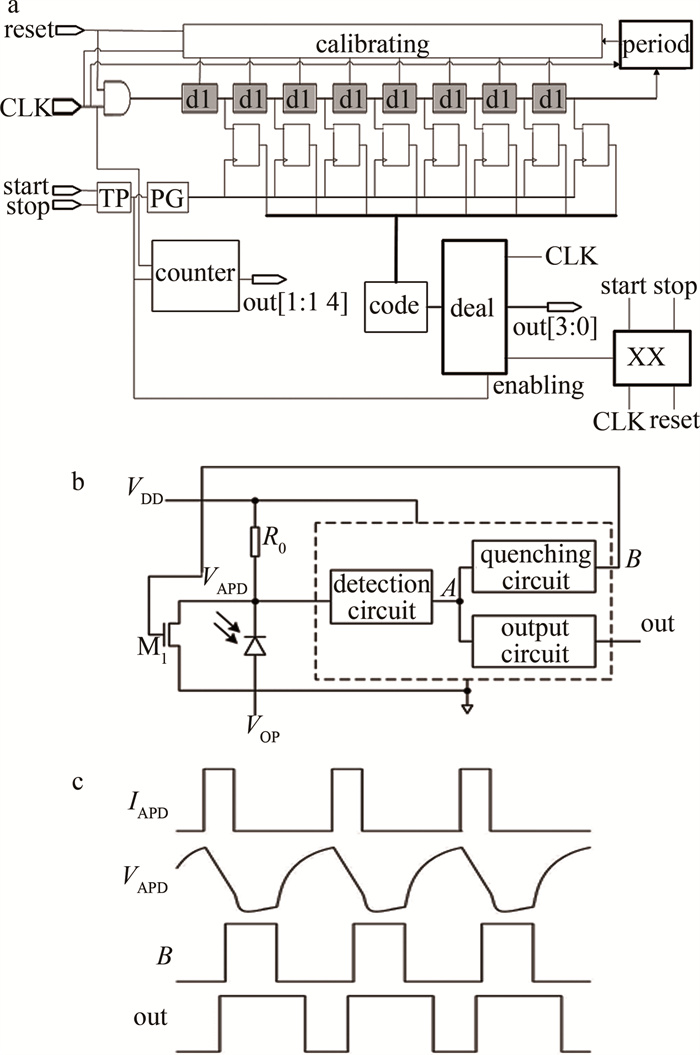
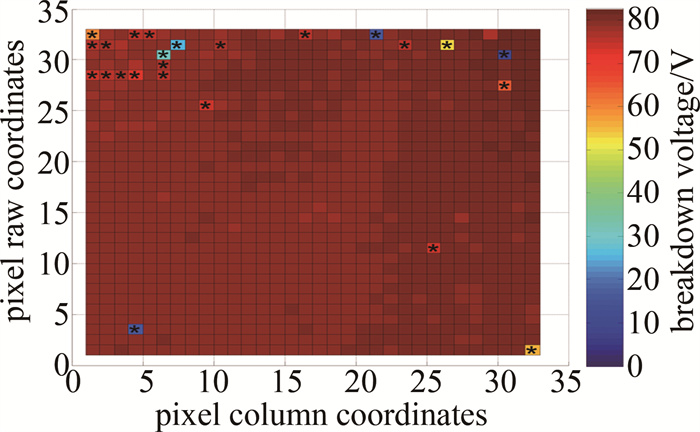
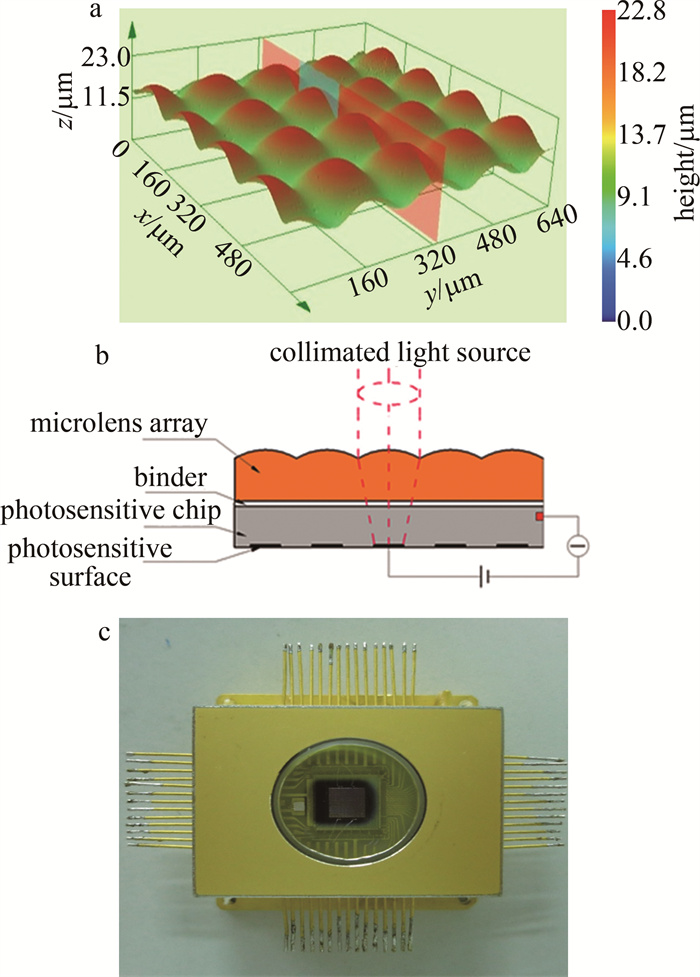
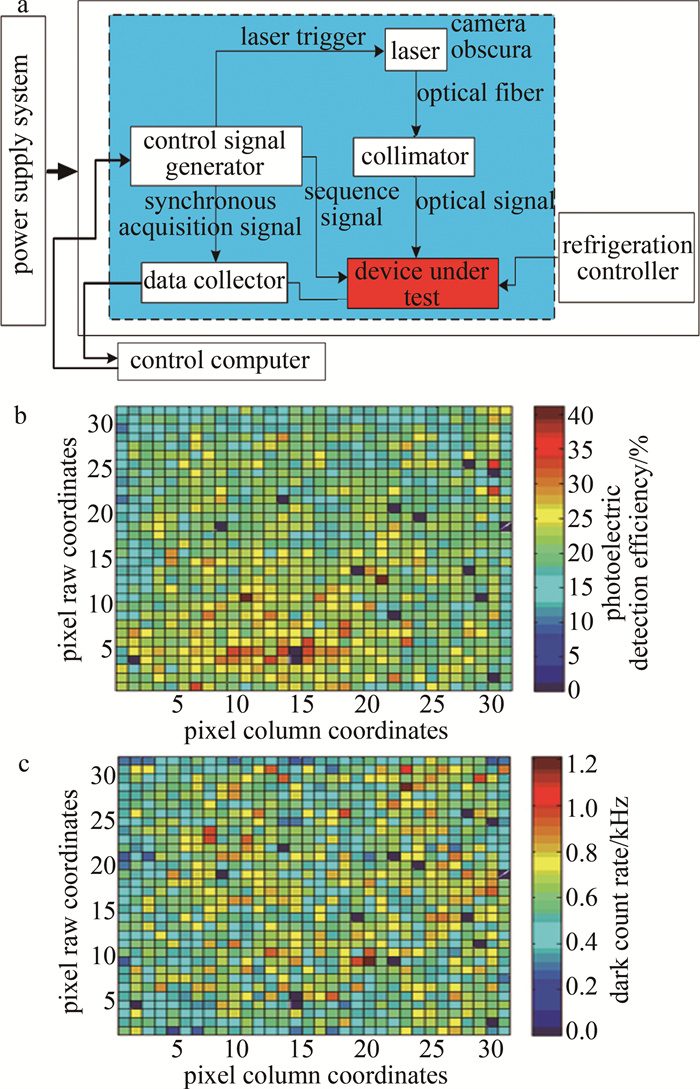
为了满足350 nm~1100 nm波长范围内远距离及微弱激光3维成像探测的需求,提出了一种规模为32×32的盖革模式硅激光焦平面阵列探测器,它主要由硅雪崩光电二极管阵列、读出电路芯片、微透镜阵列、半导体制冷器、引脚网格阵列壳体等元件组成。硅雪崩光电二极管焦平面阵列采用拉通型N+-Π1-P--Π2-P+结构,工作在盖革模式下,通过Si片背面抛磨减薄及盲孔刻蚀技术,实现了纤薄光敏区的加工;读出电路采用主动模式淬灭设计,使电路单元的死时间控制在50 ns以内,并利用一种带相移技术的时间数字转换电路优化方案,在满足时间分辨率不大于2 ns的同时,降低了读出电路芯片的功耗。结果表明,在反向过偏电压14 V、工作温度-40 ℃的条件下,该探测器在850 nm的目标波长可实现20.7%的平均光子探测效率与0.59 kHz的平均暗计数率,时间分辨率为1 ns,有效像元率优于97%。该研究为纤薄型背进光Si基激光焦平面探测器的研制提供了参考。
为了满足350 nm~1100 nm波长范围内远距离及微弱激光3维成像探测的需求,提出了一种规模为32×32的盖革模式硅激光焦平面阵列探测器,它主要由硅雪崩光电二极管阵列、读出电路芯片、微透镜阵列、半导体制冷器、引脚网格阵列壳体等元件组成。硅雪崩光电二极管焦平面阵列采用拉通型N+-Π1-P--Π2-P+结构,工作在盖革模式下,通过Si片背面抛磨减薄及盲孔刻蚀技术,实现了纤薄光敏区的加工;读出电路采用主动模式淬灭设计,使电路单元的死时间控制在50 ns以内,并利用一种带相移技术的时间数字转换电路优化方案,在满足时间分辨率不大于2 ns的同时,降低了读出电路芯片的功耗。结果表明,在反向过偏电压14 V、工作温度-40 ℃的条件下,该探测器在850 nm的目标波长可实现20.7%的平均光子探测效率与0.59 kHz的平均暗计数率,时间分辨率为1 ns,有效像元率优于97%。该研究为纤薄型背进光Si基激光焦平面探测器的研制提供了参考。
2024, 48(5): 698-704.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.013
摘要:
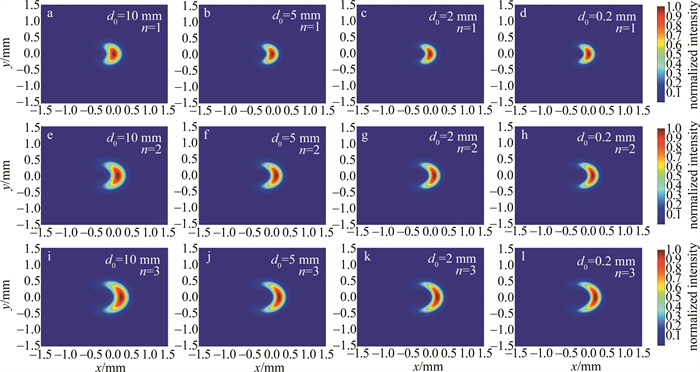
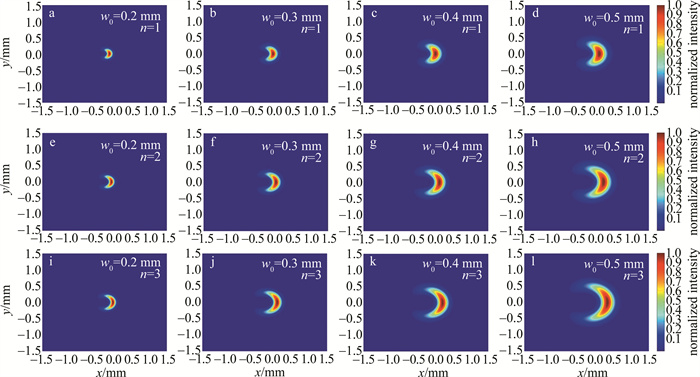
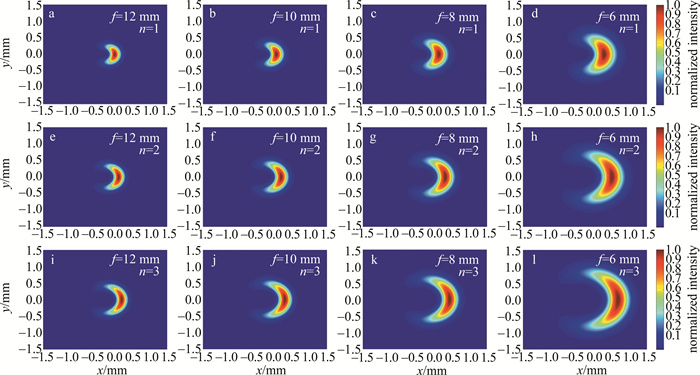
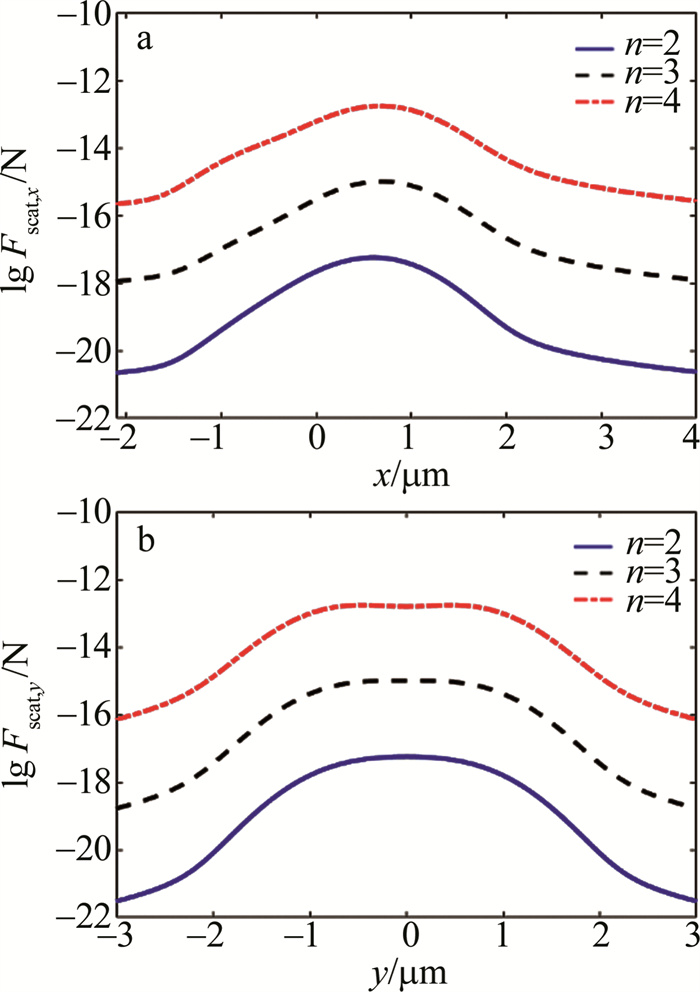
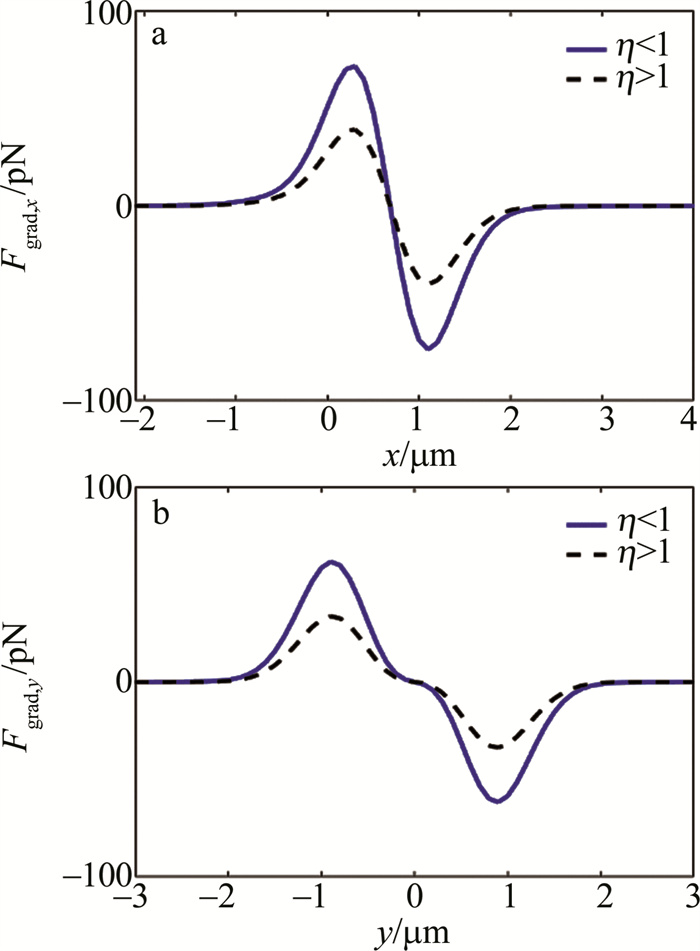
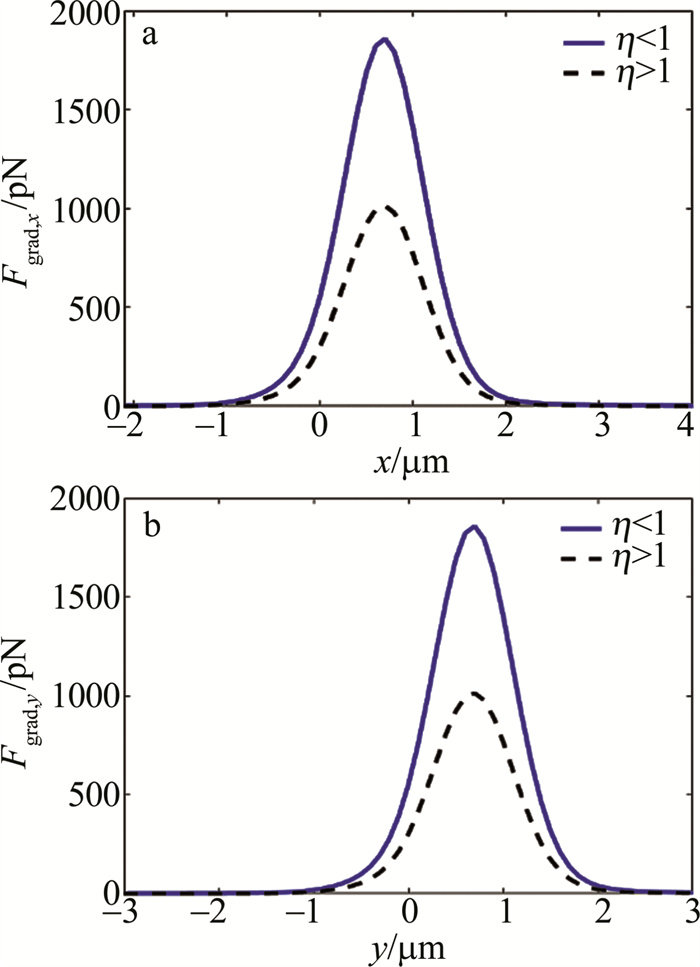
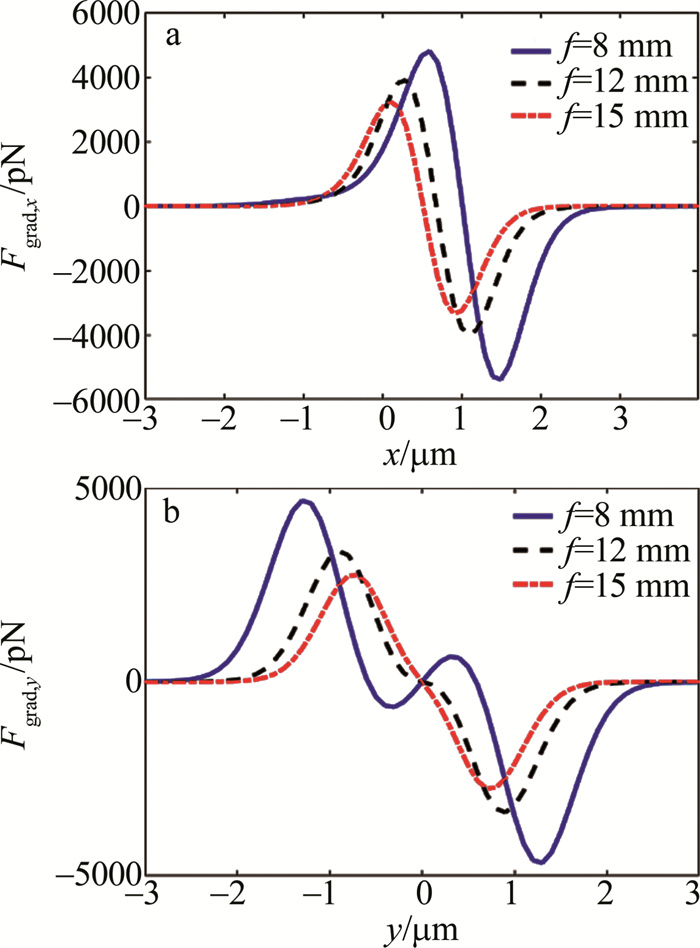
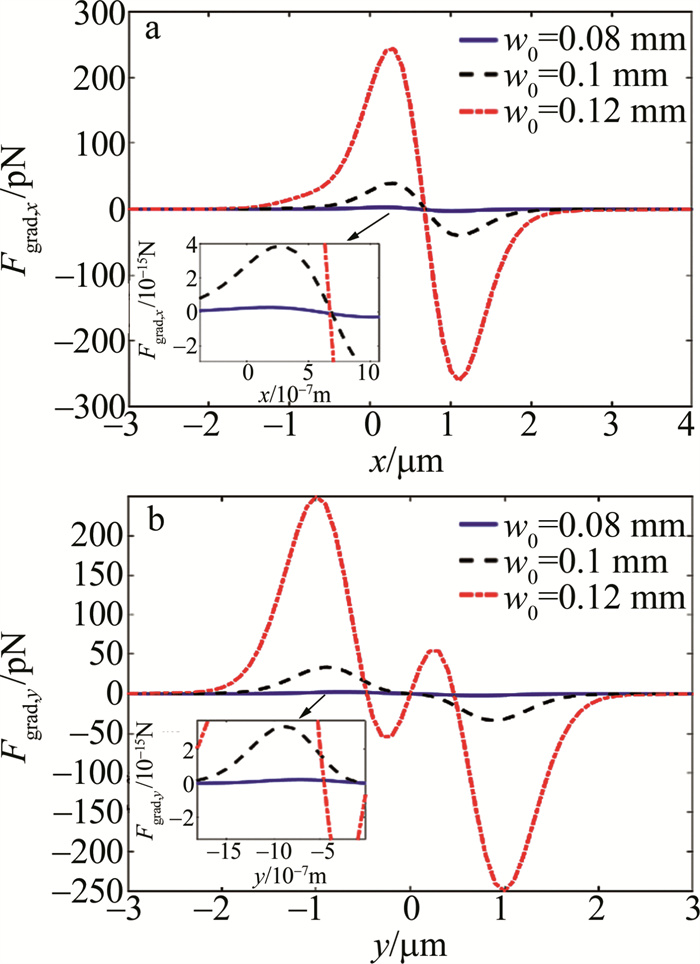
为了探究部分相干月牙形光束(PCCL)对瑞利粒子的捕获特性,采用广义惠更斯-菲涅耳原理推导了PCCL光束经过ABCD光学系统传输后的交叉谱密度及对瑞利粒子作用力的表达式,对聚焦PCCL光束在焦平面的归一化光强和对瑞利粒子作用力的分布情况进行了软件模拟和理论分析,得到了聚焦PCCL光束的光强和捕获力随光束参量以及焦距变化的规律。结果表明,选取光束阶数n=3、初始腰宽w0=0.1 mm、相干长度d0=6 mm时,经焦距f=12 mm的透镜聚焦后的PCCL光束对高、低折射率粒子均能实现捕获;由于PCCL光束在焦平面处呈现离轴光强分布,峰值光强不在坐标原点,通过调节光束阶数、初始腰宽、相干长度和焦距,可实现对聚焦PCCL光强及瑞利粒子作用力的调控,从而实现聚焦PCCL光束对不同位置处瑞利粒子的灵活捕获。该研究结果为实际聚焦PCCL光束稳定捕获微粒提供了理论依据。
为了探究部分相干月牙形光束(PCCL)对瑞利粒子的捕获特性,采用广义惠更斯-菲涅耳原理推导了PCCL光束经过ABCD光学系统传输后的交叉谱密度及对瑞利粒子作用力的表达式,对聚焦PCCL光束在焦平面的归一化光强和对瑞利粒子作用力的分布情况进行了软件模拟和理论分析,得到了聚焦PCCL光束的光强和捕获力随光束参量以及焦距变化的规律。结果表明,选取光束阶数n=3、初始腰宽w0=0.1 mm、相干长度d0=6 mm时,经焦距f=12 mm的透镜聚焦后的PCCL光束对高、低折射率粒子均能实现捕获;由于PCCL光束在焦平面处呈现离轴光强分布,峰值光强不在坐标原点,通过调节光束阶数、初始腰宽、相干长度和焦距,可实现对聚焦PCCL光强及瑞利粒子作用力的调控,从而实现聚焦PCCL光束对不同位置处瑞利粒子的灵活捕获。该研究结果为实际聚焦PCCL光束稳定捕获微粒提供了理论依据。

2024, 48(5): 613-619.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.001
摘要:
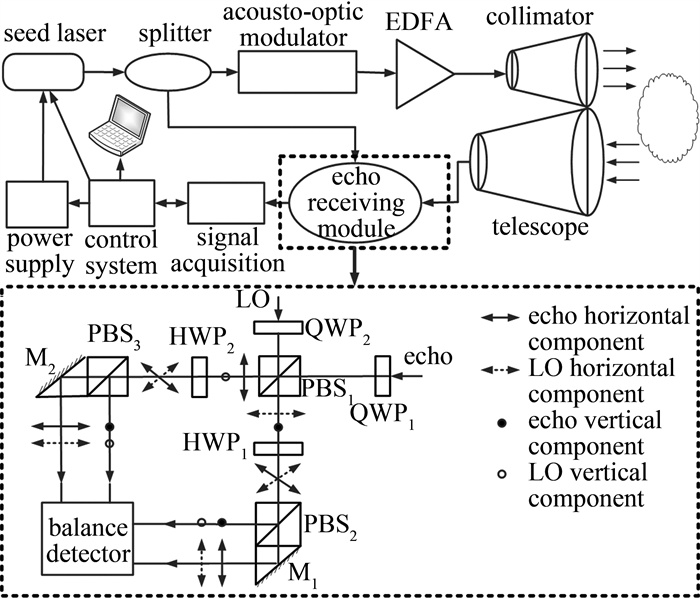
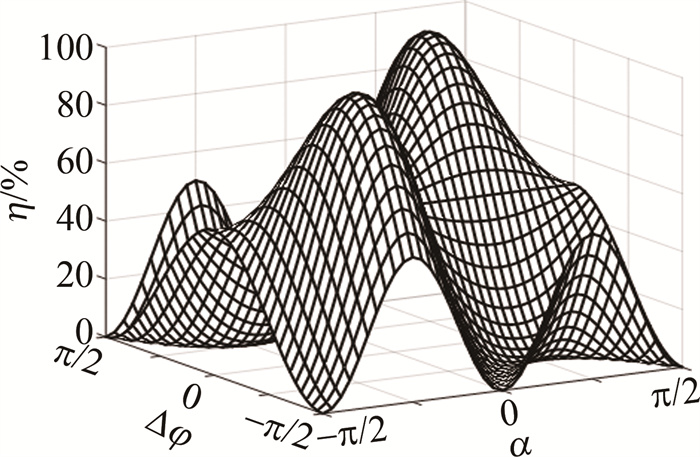
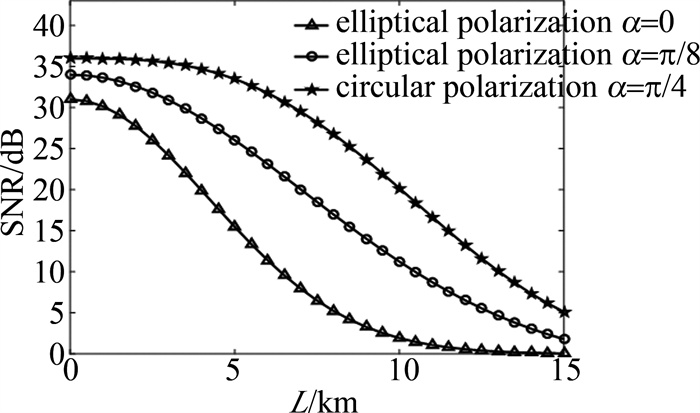
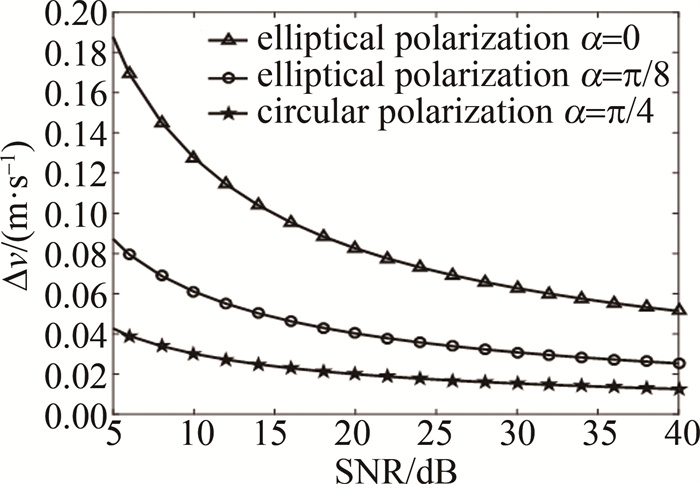
为了解决大气退偏效应造成激光回波与本振光偏振失配,导致相干测风激光雷达(LiDAR)外差效率降低的问题,基于相干多普勒激光测风雷达的系统组成和工作原理,采用数学建模法,仿真分析了回波偏振态对系统信噪比、探测距离和径向风速误差的影响;提出了偏振态修正途径,并利用琼斯矩阵建模讨论修正精度;用径向风速比对实验验证不同回波偏振态对径向风速精度的影响。结果表明,对于同一测试系统,在相同的天气条件下,与回波为圆偏振态相比,回波为椭圆偏振态时的最大探测距离下降46.7%,径向风速精度下降63%。此研究为相干多普勒测风激光雷达回波接收模块的优化提供了理论支撑。
为了解决大气退偏效应造成激光回波与本振光偏振失配,导致相干测风激光雷达(LiDAR)外差效率降低的问题,基于相干多普勒激光测风雷达的系统组成和工作原理,采用数学建模法,仿真分析了回波偏振态对系统信噪比、探测距离和径向风速误差的影响;提出了偏振态修正途径,并利用琼斯矩阵建模讨论修正精度;用径向风速比对实验验证不同回波偏振态对径向风速精度的影响。结果表明,对于同一测试系统,在相同的天气条件下,与回波为圆偏振态相比,回波为椭圆偏振态时的最大探测距离下降46.7%,径向风速精度下降63%。此研究为相干多普勒测风激光雷达回波接收模块的优化提供了理论支撑。
2024, 48(5): 637-642.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.004
摘要:
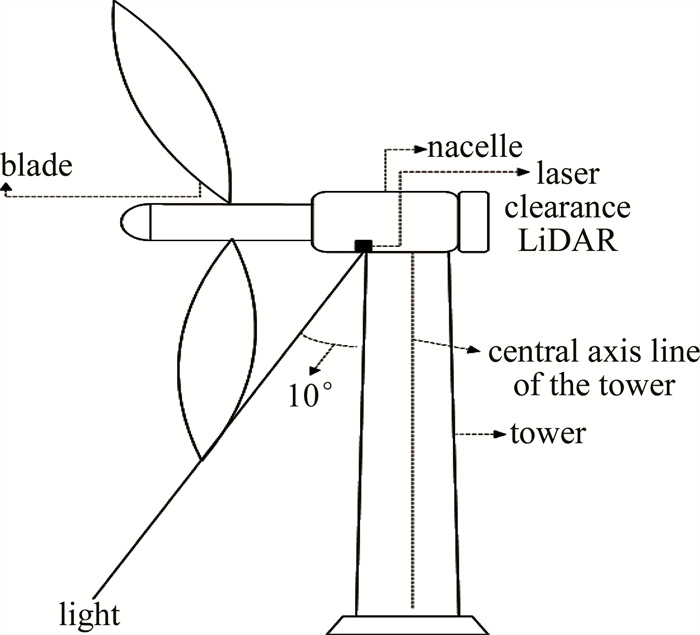
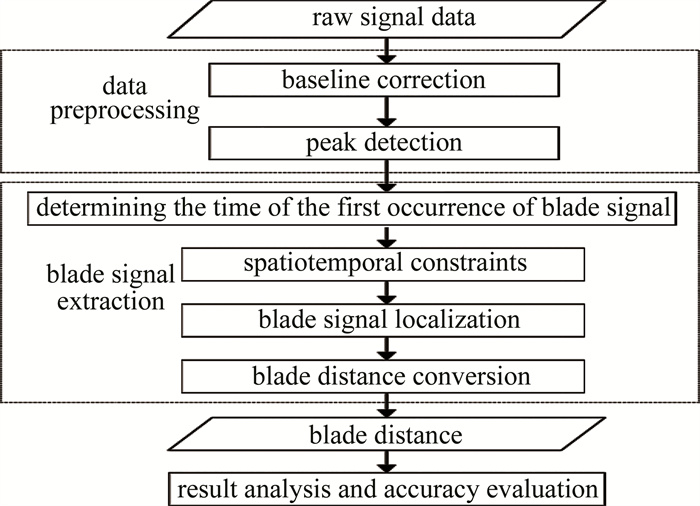
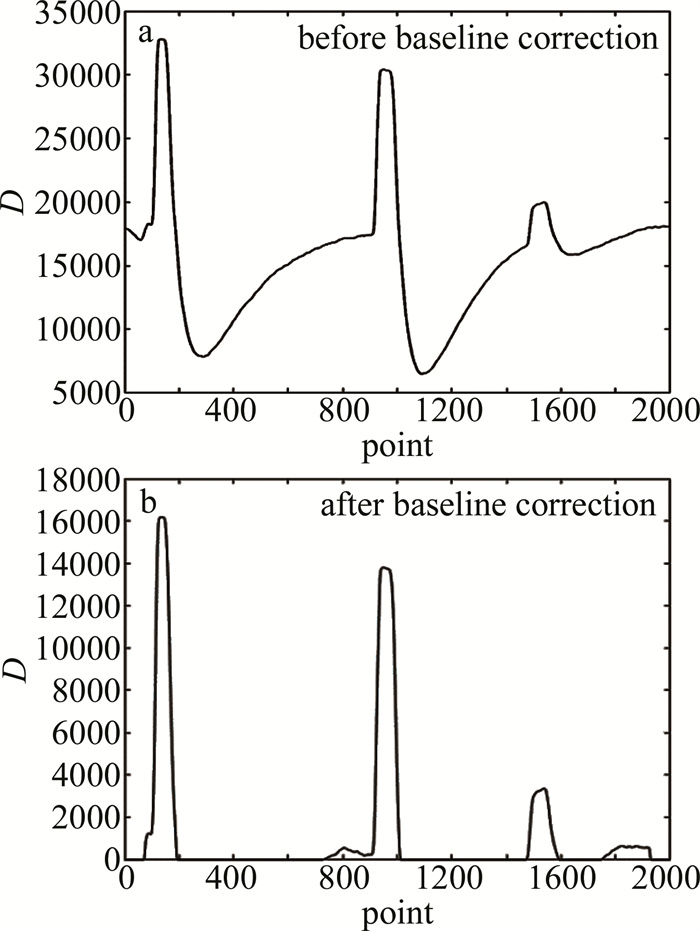
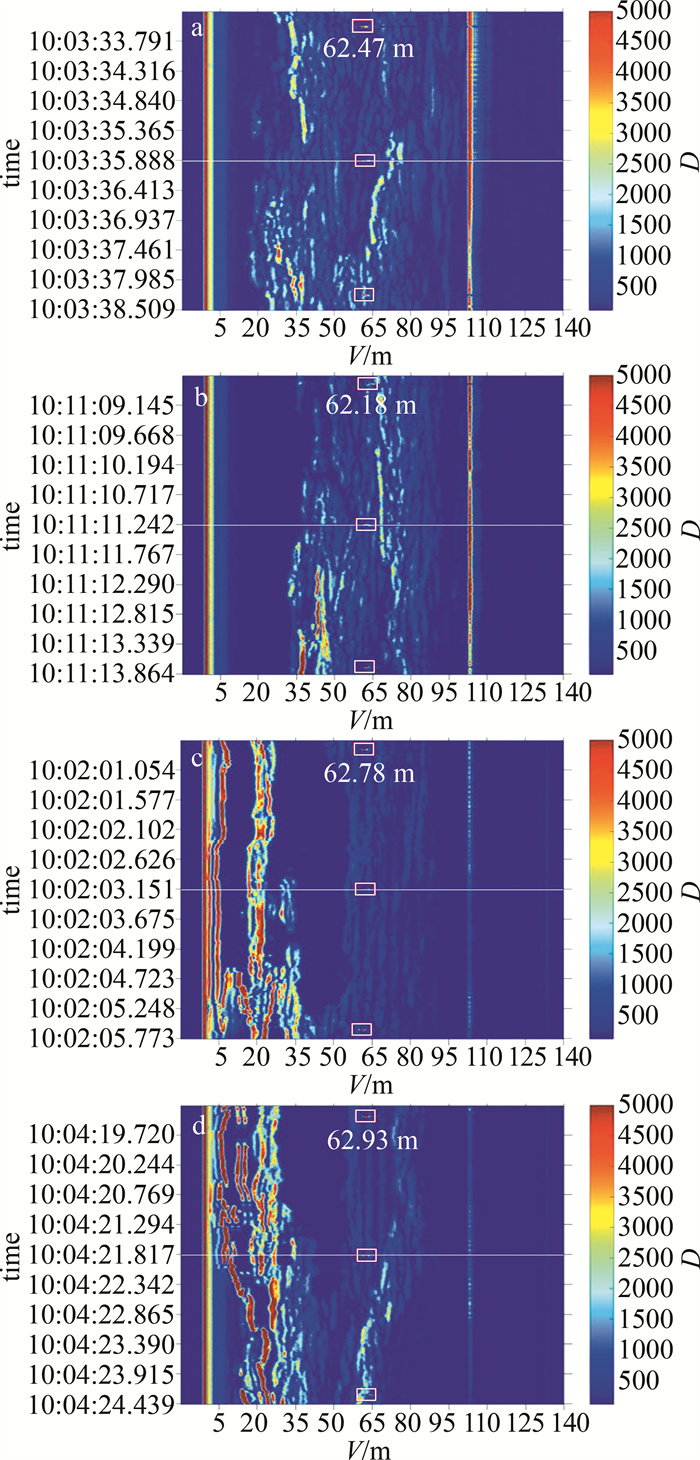
为了降低雾天风力发电机组叶片信号的虚警率,以激光净空雷达获取的原始信号数据为基础数据源,在信号预处理的基础上,采用时空约束的方法,实现了叶片信号的准确提取;并将集成了该叶片信号提取方法的激光净空雷达在常年有雾的地区进行了挂机试验。结果表明,所提出的叶片信号提取方法取得了较好的效果,叶片虚警率低于2%,提升了激光净空雷达测距数据的可靠性和环境适应性。该研究为激光净空雷达用于风机净空监测提供了参考。
为了降低雾天风力发电机组叶片信号的虚警率,以激光净空雷达获取的原始信号数据为基础数据源,在信号预处理的基础上,采用时空约束的方法,实现了叶片信号的准确提取;并将集成了该叶片信号提取方法的激光净空雷达在常年有雾的地区进行了挂机试验。结果表明,所提出的叶片信号提取方法取得了较好的效果,叶片虚警率低于2%,提升了激光净空雷达测距数据的可靠性和环境适应性。该研究为激光净空雷达用于风机净空监测提供了参考。
2024, 48(5): 643-650.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.005
摘要:
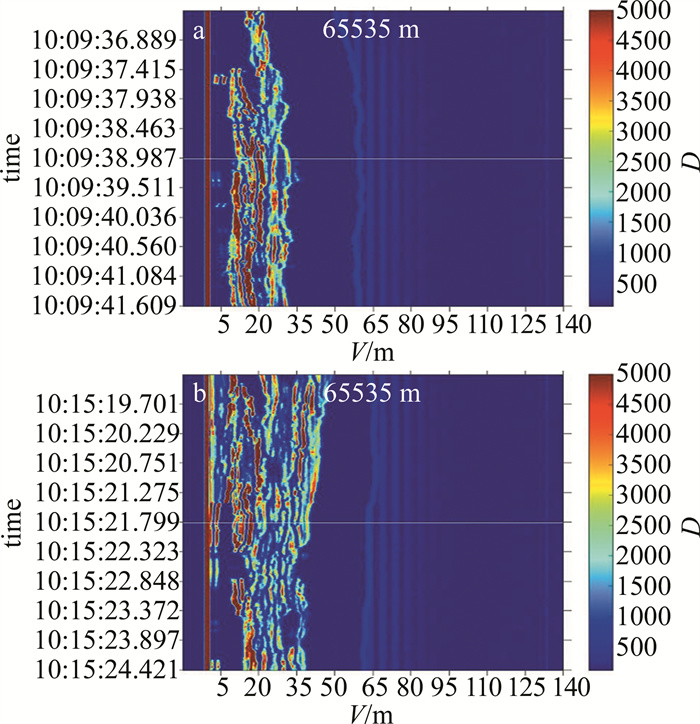
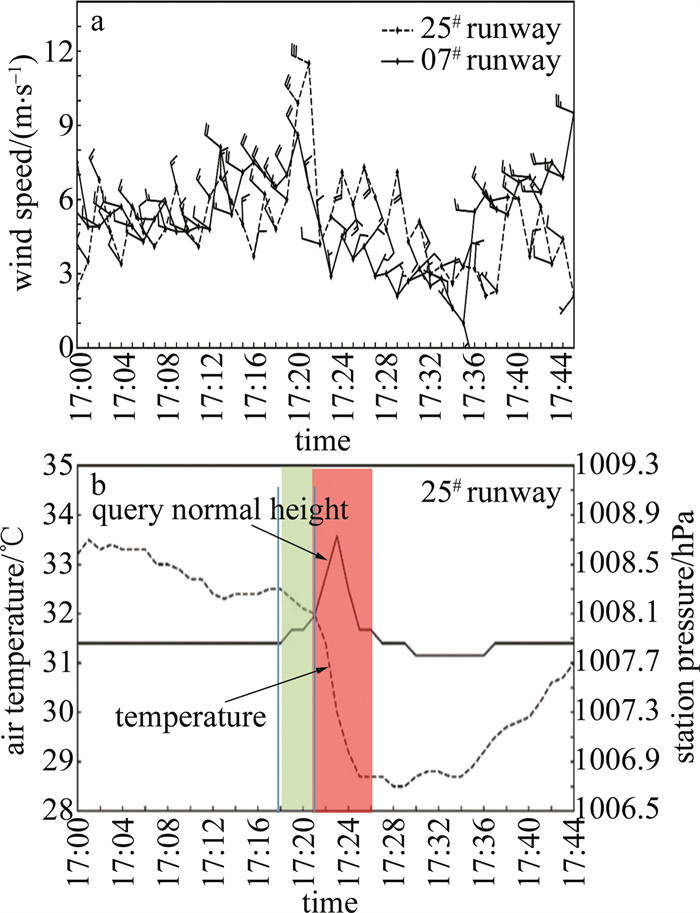
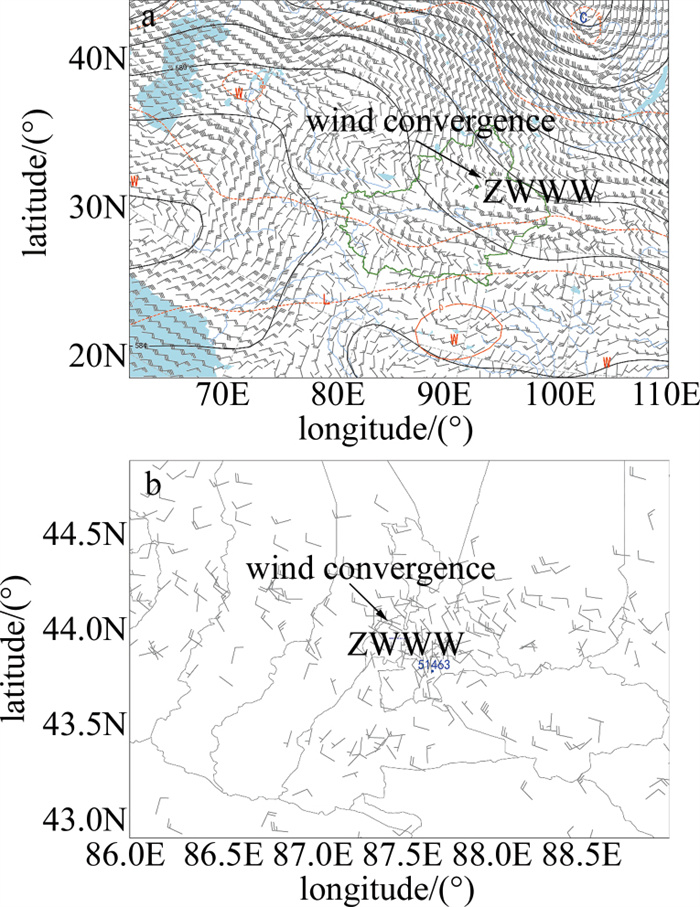
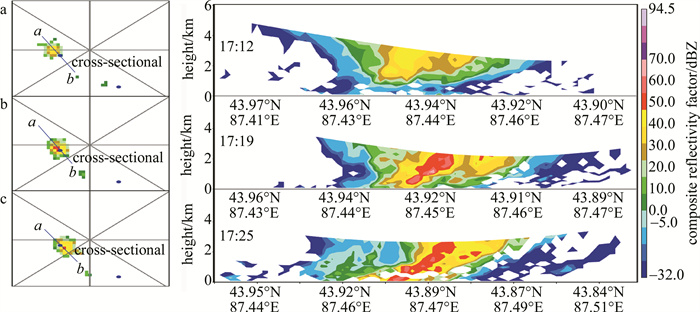
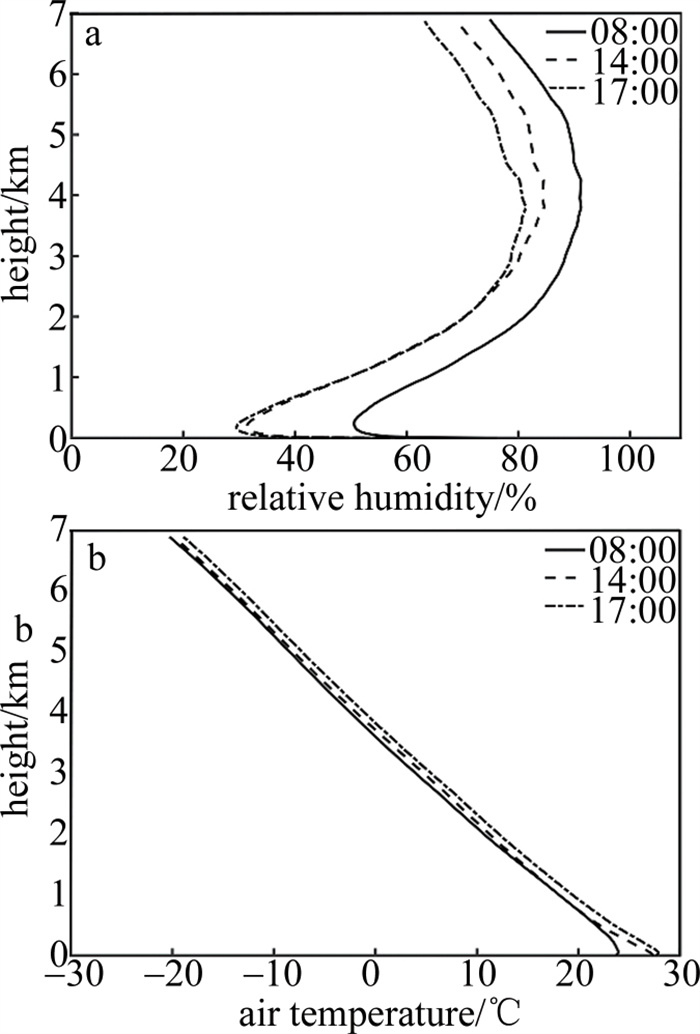
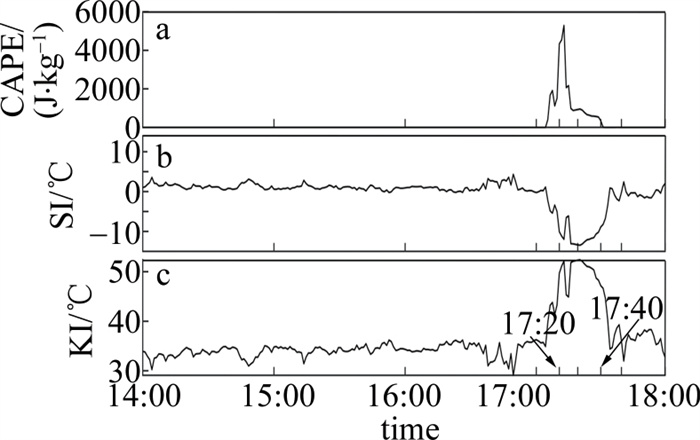
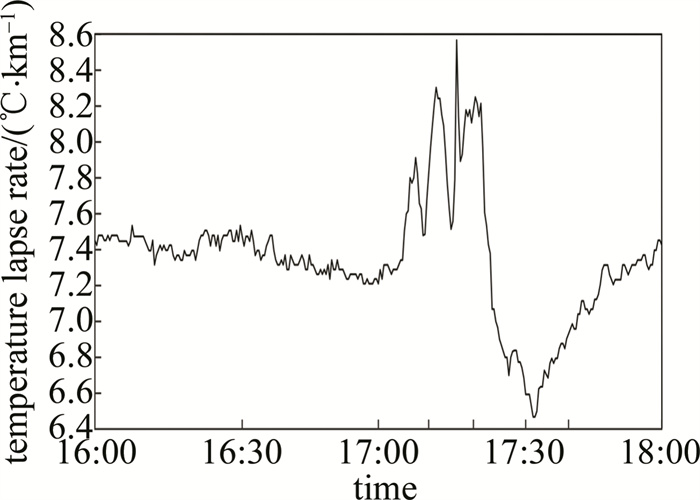
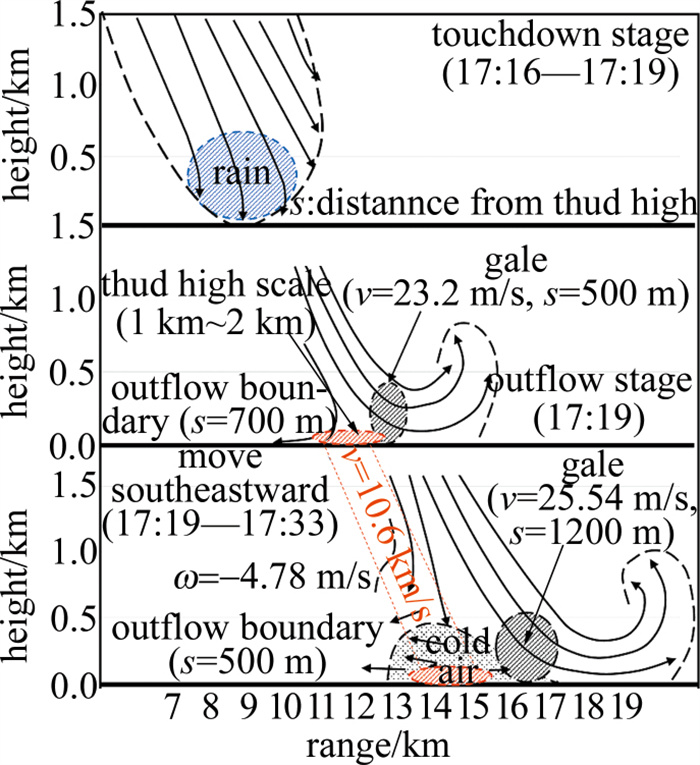
为了揭示中γ尺度孤立单体雷暴引发的下击暴流的风场结构及成因,采用多源数据结合的方法着重分析了激光雷达资料,对2022-06-25发生在乌鲁木齐机场跑道入口端的一次湿下击暴流进行了结构场剖析,取得了能够表征下击暴流发生发展过程的数据。结果表明,本次过程发生在西北气流控制且有明显风场辐合和冷空气堆积的背景下,中低层切变线和地面中尺度辐合线是此次过程的触发机制;两个气象雷达体扫呈现了孤立雷暴的初生-发展-成熟阶段,及回波中心下降接地引发湿下击暴流的过程;强的不稳定能量是造成此次强天气过程的关键;强降水发生前6 min不稳定能量积攒至最强,随后能量迅速释放,强下沉气伴短时强降水,触发了湿下击暴流;测风激光雷达可观测到雷暴高压始发的中心位置和反气旋特征、大风区和外流边界,明确了高压区域大小和强度变化,对强下沉气流爆发的时间和强度指征明显。这些结果为研究雷暴单体引发下击暴流的结构提供了有力支持,提高了民航精细化服务的能力。
为了揭示中γ尺度孤立单体雷暴引发的下击暴流的风场结构及成因,采用多源数据结合的方法着重分析了激光雷达资料,对2022-06-25发生在乌鲁木齐机场跑道入口端的一次湿下击暴流进行了结构场剖析,取得了能够表征下击暴流发生发展过程的数据。结果表明,本次过程发生在西北气流控制且有明显风场辐合和冷空气堆积的背景下,中低层切变线和地面中尺度辐合线是此次过程的触发机制;两个气象雷达体扫呈现了孤立雷暴的初生-发展-成熟阶段,及回波中心下降接地引发湿下击暴流的过程;强的不稳定能量是造成此次强天气过程的关键;强降水发生前6 min不稳定能量积攒至最强,随后能量迅速释放,强下沉气伴短时强降水,触发了湿下击暴流;测风激光雷达可观测到雷暴高压始发的中心位置和反气旋特征、大风区和外流边界,明确了高压区域大小和强度变化,对强下沉气流爆发的时间和强度指征明显。这些结果为研究雷暴单体引发下击暴流的结构提供了有力支持,提高了民航精细化服务的能力。


2024, 48(5): 657-664.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.007
摘要:
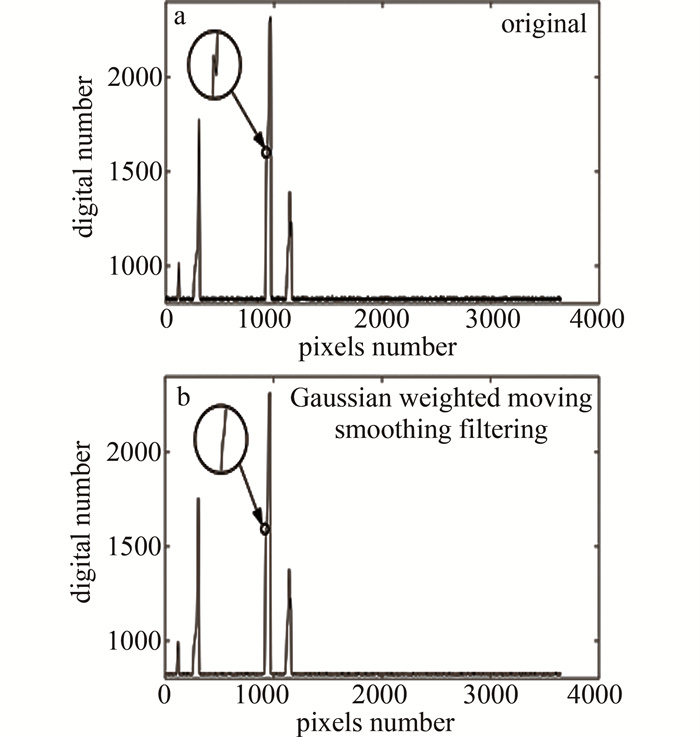
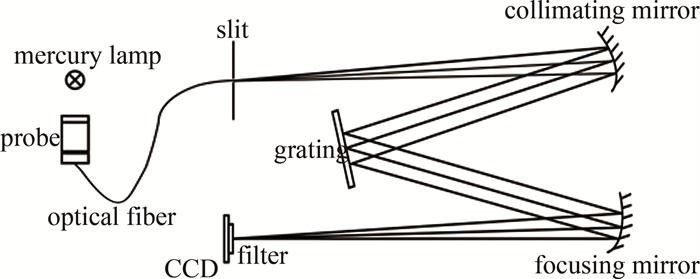
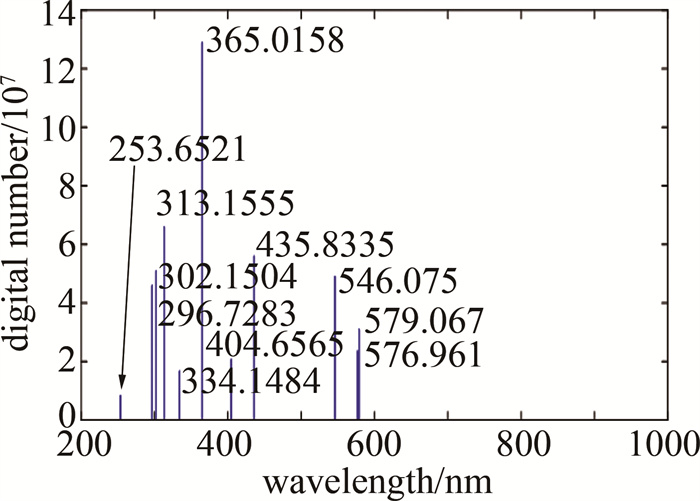
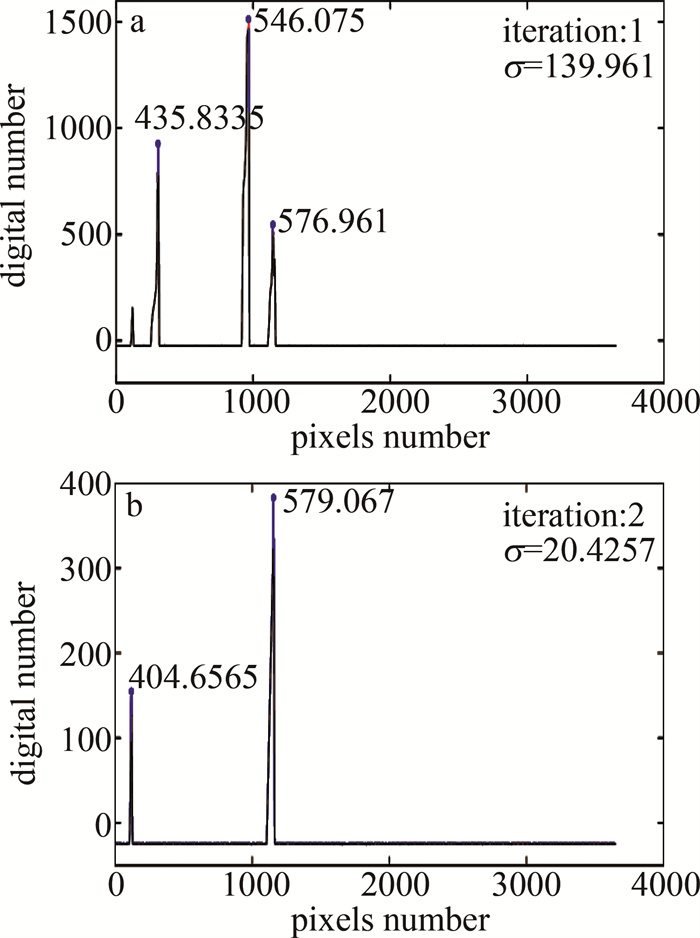
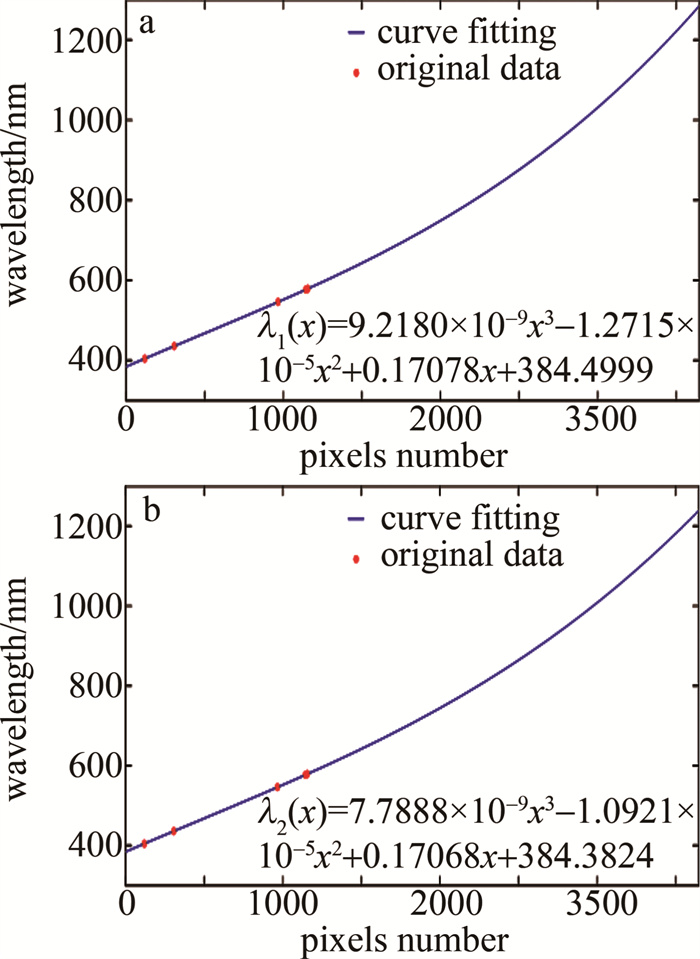
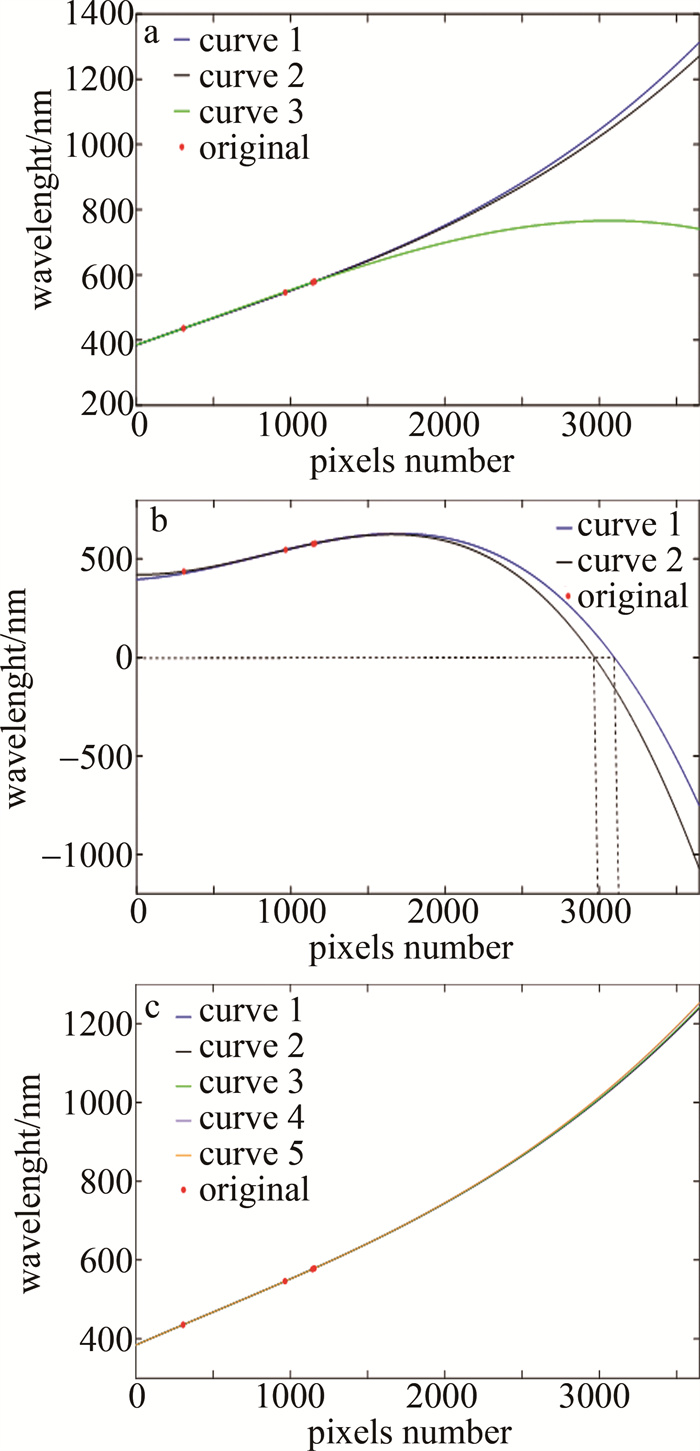
为了解决可见光光谱辐射计波长标定过程中存在的峰值偏移、较弱特征谱误判及人工谱线识别等问题,采用自适应阈值法和差分法完成对特征谱检测与识别,利用最小二乘法和拉格朗日插值法确定波长和像元的关系,进行了理论分析和实验验证,获得最佳波长标定方程。结果表明,特征谱根据谱线强度依次被检测并识别出来,以404.6565 nm、435.8335 nm、546.0750 nm、579.0670 nm为基准的拉格朗日插值法得到的方程为最佳波长标定方程,其残差标准差仅为3.2747×10-13nm,波长标定误差分布在±0.2 nm范围内。自动谱线检测方法及谱线识别方法提高了波长标定效率,避免了噪声误判和谱线识别错误现象,为其它光谱类仪器的波长标定提供了参考。
为了解决可见光光谱辐射计波长标定过程中存在的峰值偏移、较弱特征谱误判及人工谱线识别等问题,采用自适应阈值法和差分法完成对特征谱检测与识别,利用最小二乘法和拉格朗日插值法确定波长和像元的关系,进行了理论分析和实验验证,获得最佳波长标定方程。结果表明,特征谱根据谱线强度依次被检测并识别出来,以404.6565 nm、435.8335 nm、546.0750 nm、579.0670 nm为基准的拉格朗日插值法得到的方程为最佳波长标定方程,其残差标准差仅为3.2747×10-13nm,波长标定误差分布在±0.2 nm范围内。自动谱线检测方法及谱线识别方法提高了波长标定效率,避免了噪声误判和谱线识别错误现象,为其它光谱类仪器的波长标定提供了参考。


2024, 48(5): 671-676.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.009
摘要:
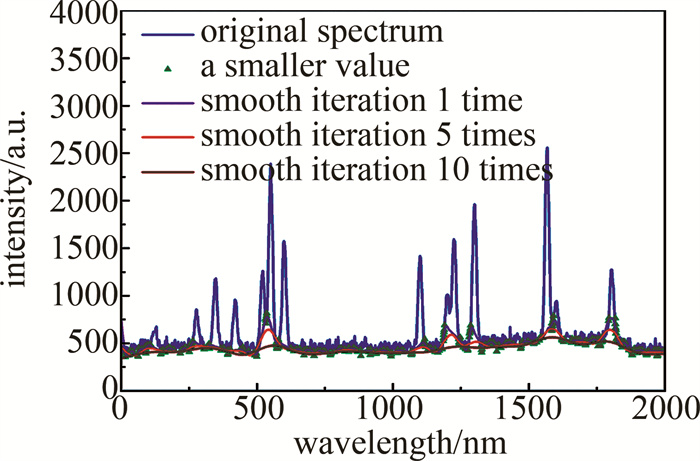
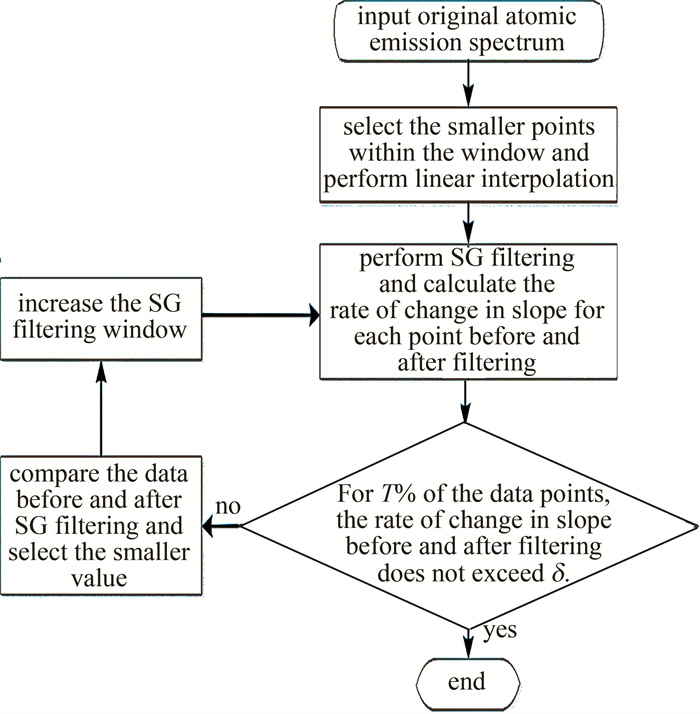
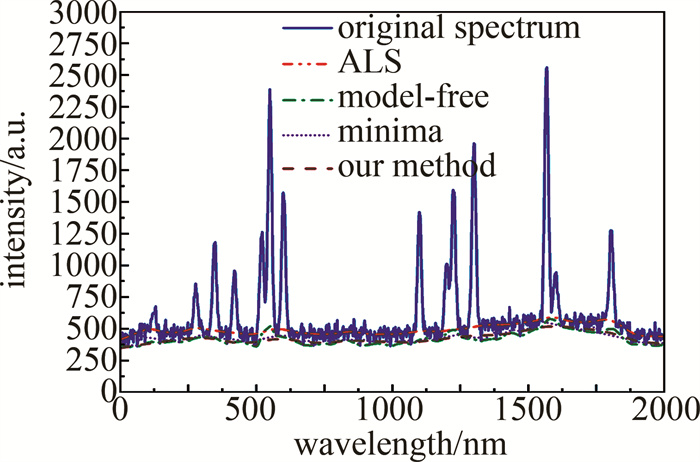
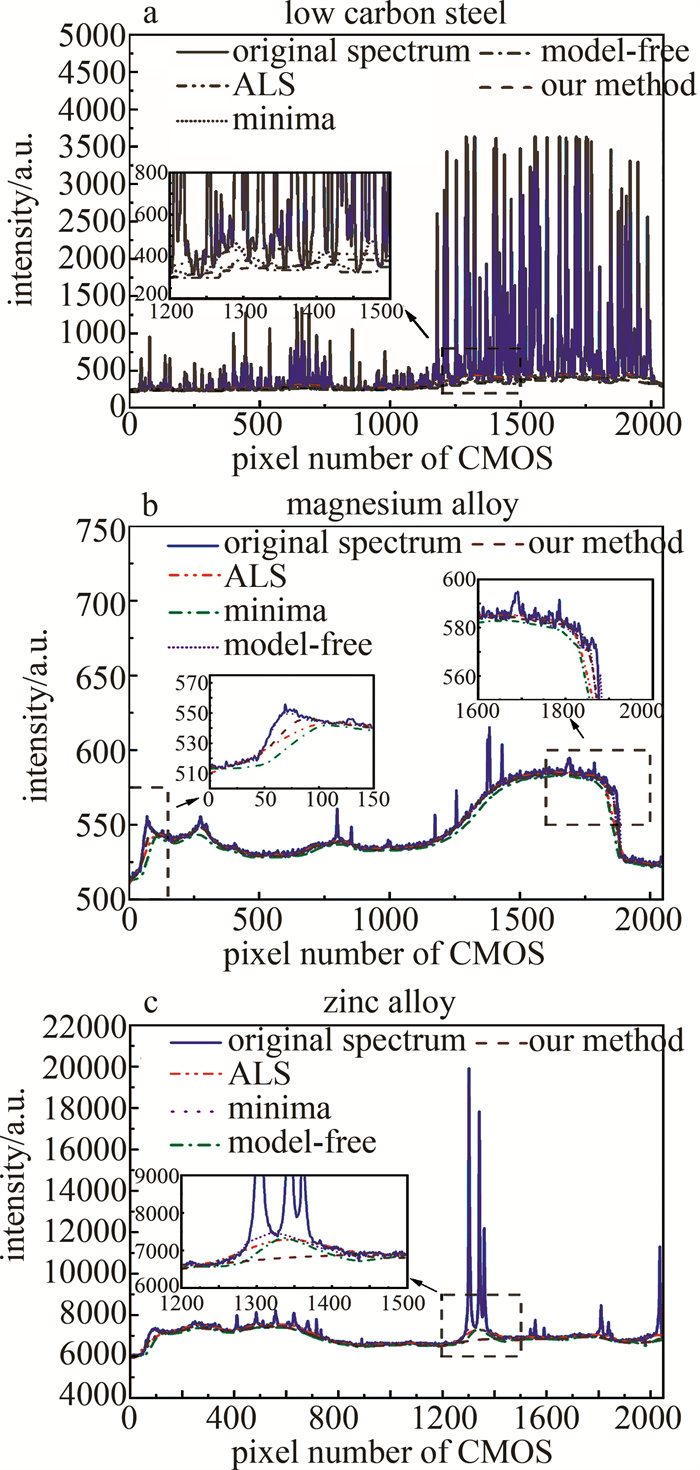
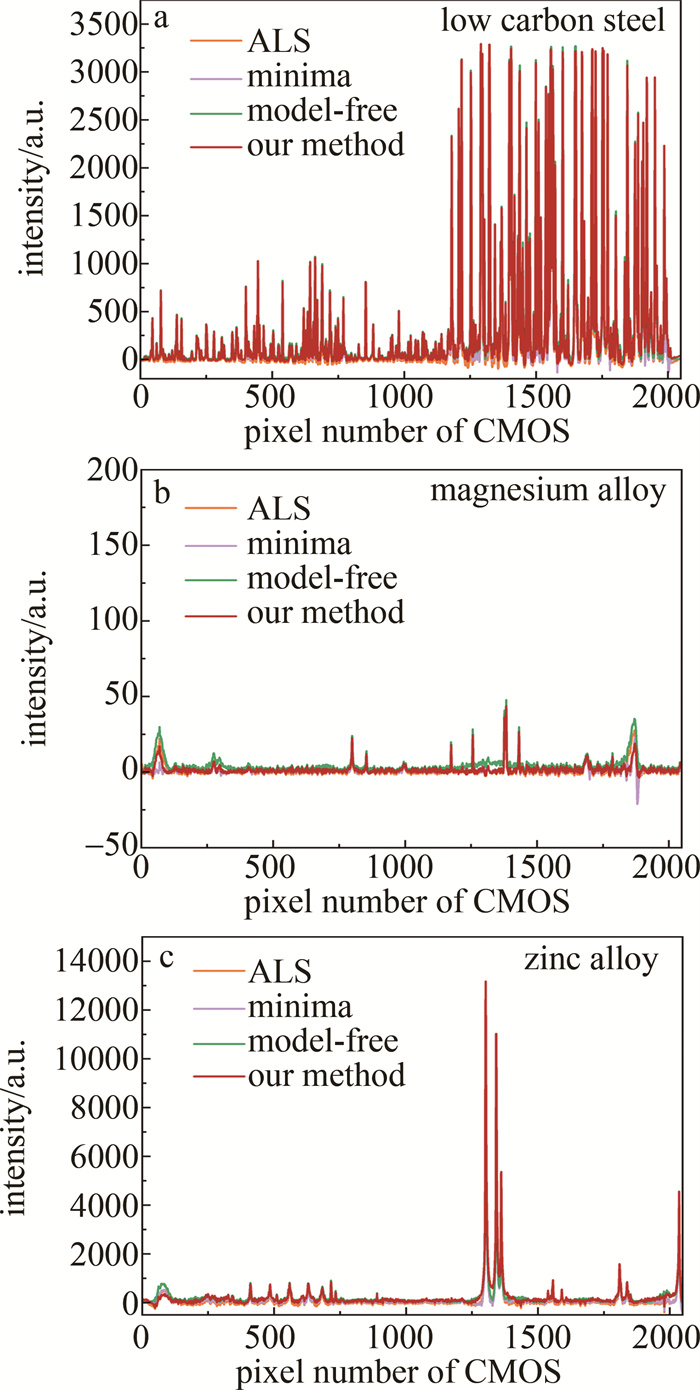
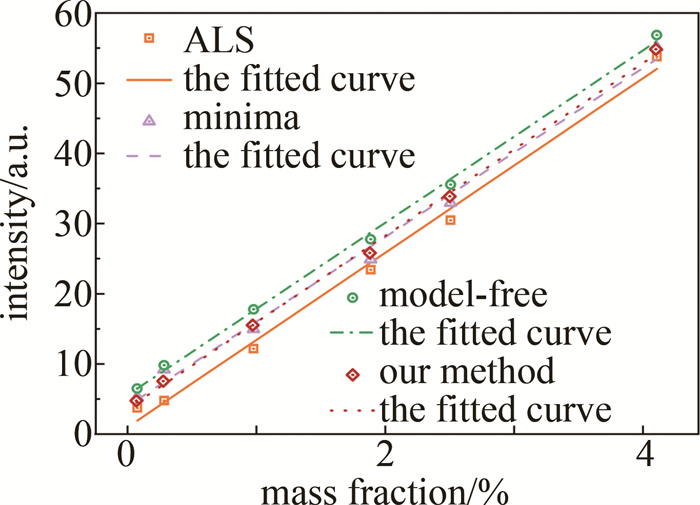
为了解决光谱信号后续处理中基线影响的问题,提出了一种光谱信号区域基线拟合算法。从原始光谱中提取一定数量的较小数据点,并通过线性插值方法获得初始基线;在光谱存在重叠峰的情况下,选取的较小数据点可能包含非基线的异常点;引入了平滑迭代,提出用斜率变化率对基线进行判定的方法,将该算法与不同基线拟合方法在模拟光谱和实际光谱上进行了对比。结果表明,同其它方法相比,该算法在拟合模拟基线时,相对标准偏差最小,为8.25%;并且基于该算法获得的真实光谱定标曲线相关性最高,为99.85%;预测均方根误差最小,为0.5912。所提出的基线拟合算法在不同类型的原子发射光谱中均表现出高度准确性和稳定性,可以很好地估计原子发射光谱的连续背景。
为了解决光谱信号后续处理中基线影响的问题,提出了一种光谱信号区域基线拟合算法。从原始光谱中提取一定数量的较小数据点,并通过线性插值方法获得初始基线;在光谱存在重叠峰的情况下,选取的较小数据点可能包含非基线的异常点;引入了平滑迭代,提出用斜率变化率对基线进行判定的方法,将该算法与不同基线拟合方法在模拟光谱和实际光谱上进行了对比。结果表明,同其它方法相比,该算法在拟合模拟基线时,相对标准偏差最小,为8.25%;并且基于该算法获得的真实光谱定标曲线相关性最高,为99.85%;预测均方根误差最小,为0.5912。所提出的基线拟合算法在不同类型的原子发射光谱中均表现出高度准确性和稳定性,可以很好地估计原子发射光谱的连续背景。
2024, 48(5): 677-683.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.010
摘要:
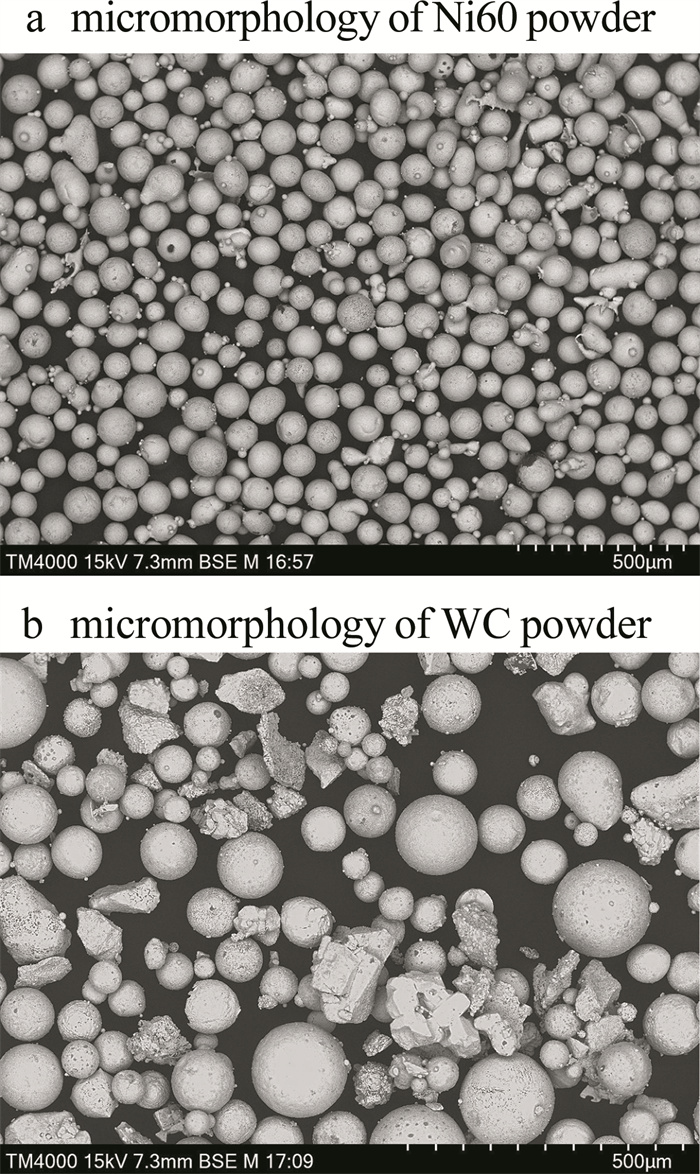
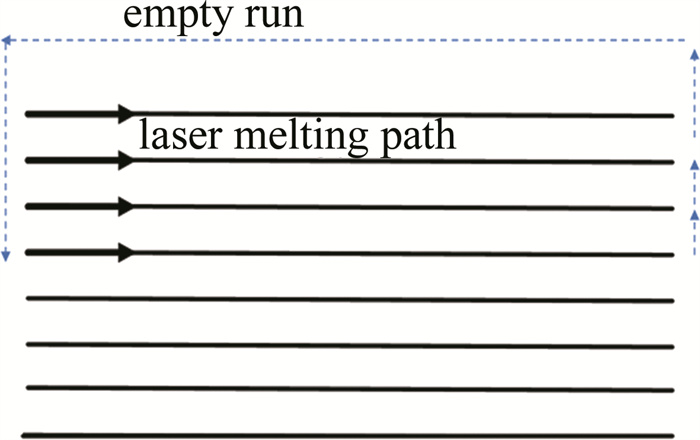
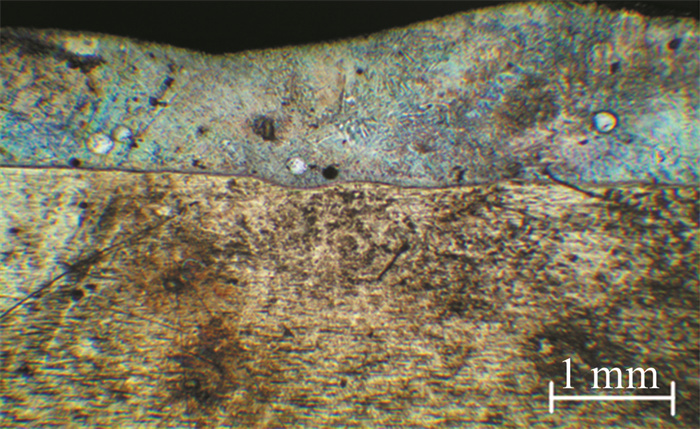
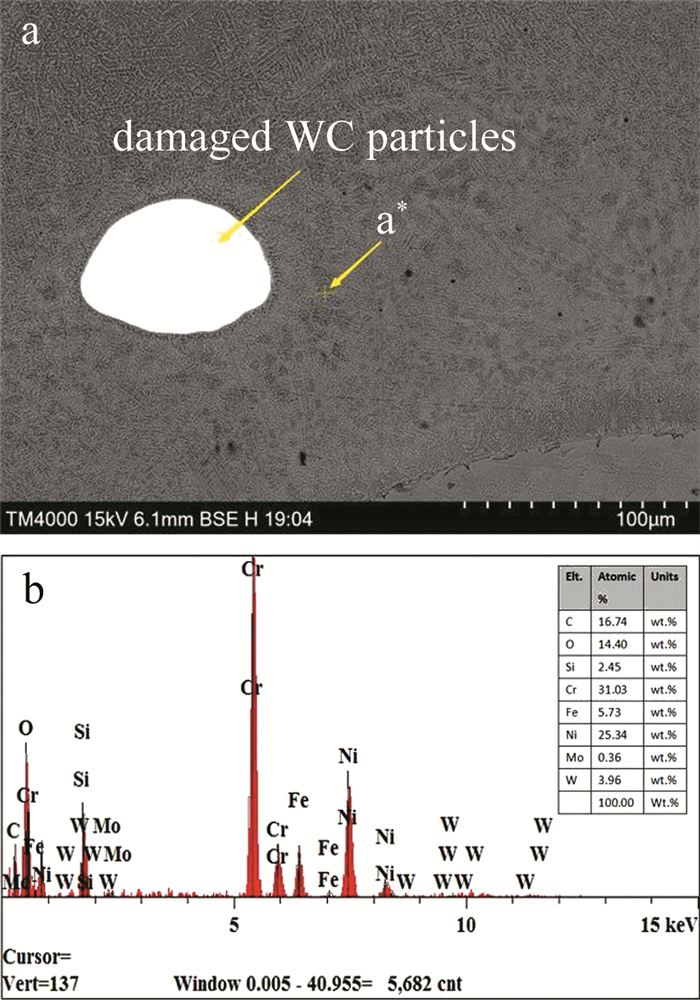
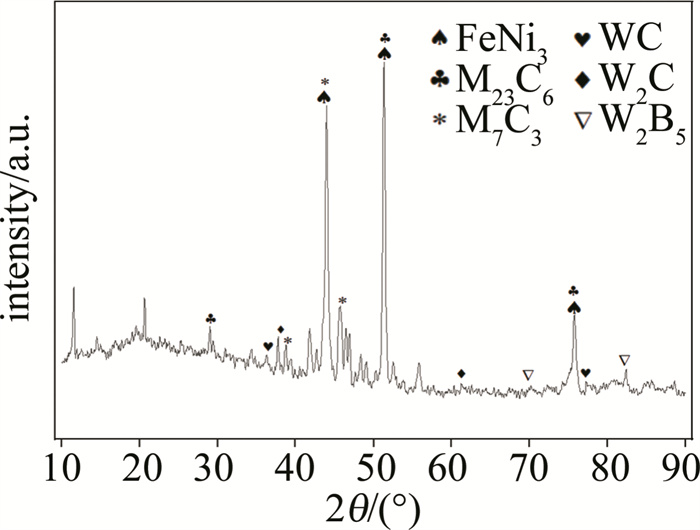
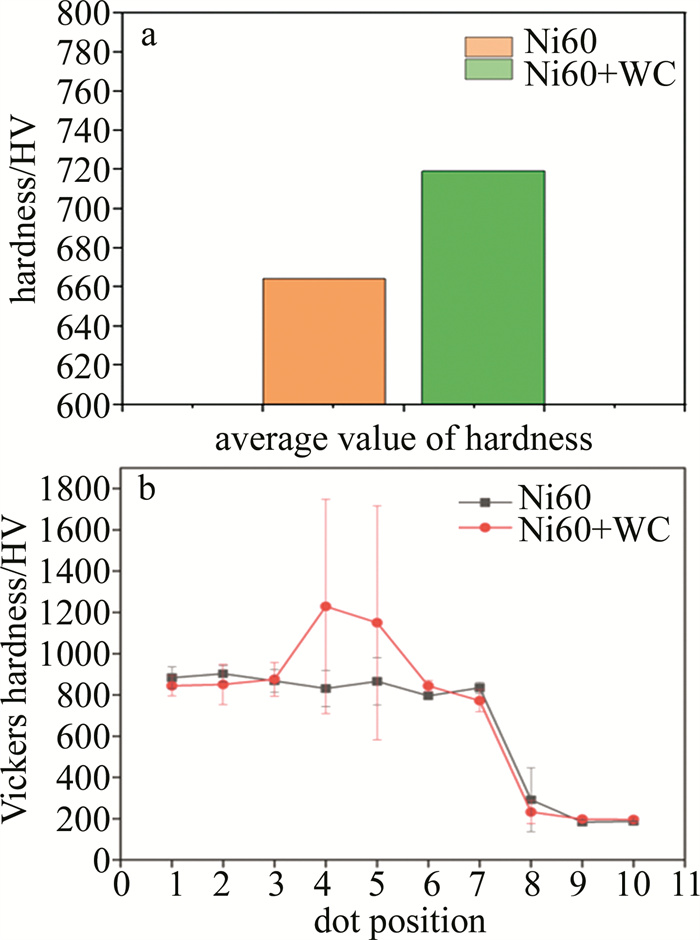
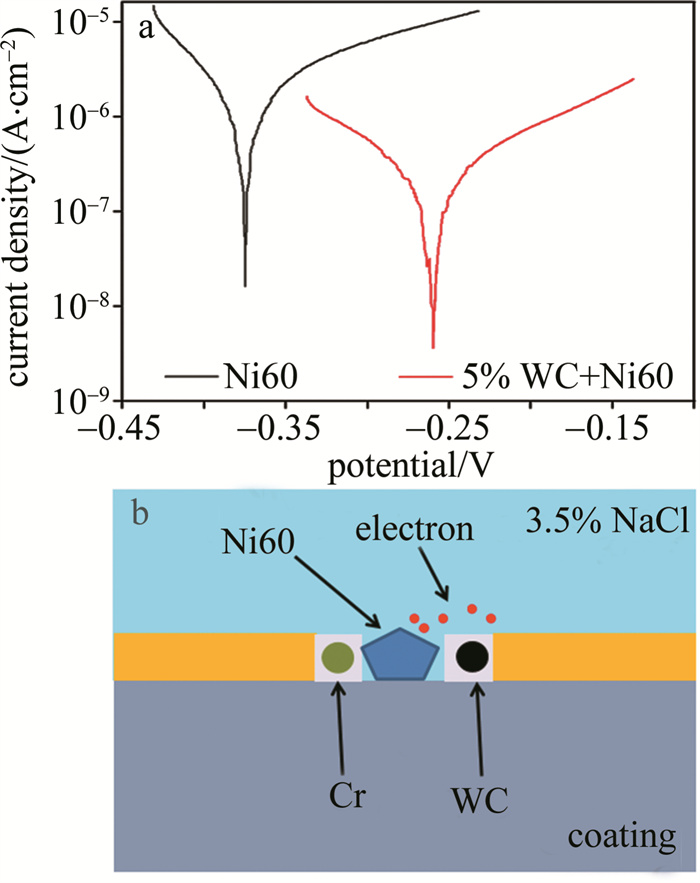
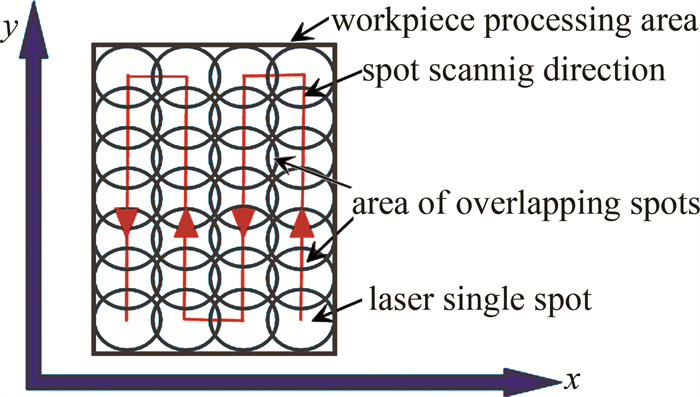
为了提升316L不锈钢的耐腐蚀性能,延长其在海洋环境中的使用寿命,讨论了激光熔覆技术在316L基材表面熔覆了纯Ni60涂层和WC+Ni60复合涂层的方法和效果。WC+Ni60复合涂层结合了WC颗粒的硬度和Ni60基体的韧性,具有更优异的综合性能,适用于对基材表面进行更高强度的保护。分别利用硬度仪、X射线衍射仪和电化学工作站对涂层检索和测试。结果表明,WC+Ni60复合涂层的平均截面硬度为719 HV,但各区域波动较大,同时熔覆层表面相较纯Ni60涂层更耐腐蚀,自腐蚀电位提高了0.12 V,自腐蚀电流密度降低了2.49×10-6A/cm2。本研究为后期制备耐海水腐蚀复合涂层提供了参考。
为了提升316L不锈钢的耐腐蚀性能,延长其在海洋环境中的使用寿命,讨论了激光熔覆技术在316L基材表面熔覆了纯Ni60涂层和WC+Ni60复合涂层的方法和效果。WC+Ni60复合涂层结合了WC颗粒的硬度和Ni60基体的韧性,具有更优异的综合性能,适用于对基材表面进行更高强度的保护。分别利用硬度仪、X射线衍射仪和电化学工作站对涂层检索和测试。结果表明,WC+Ni60复合涂层的平均截面硬度为719 HV,但各区域波动较大,同时熔覆层表面相较纯Ni60涂层更耐腐蚀,自腐蚀电位提高了0.12 V,自腐蚀电流密度降低了2.49×10-6A/cm2。本研究为后期制备耐海水腐蚀复合涂层提供了参考。

2024, 48(5): 684-690.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.011
摘要:
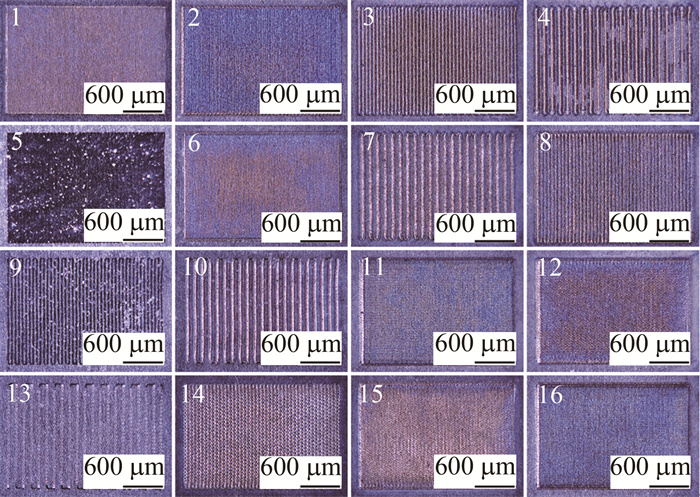
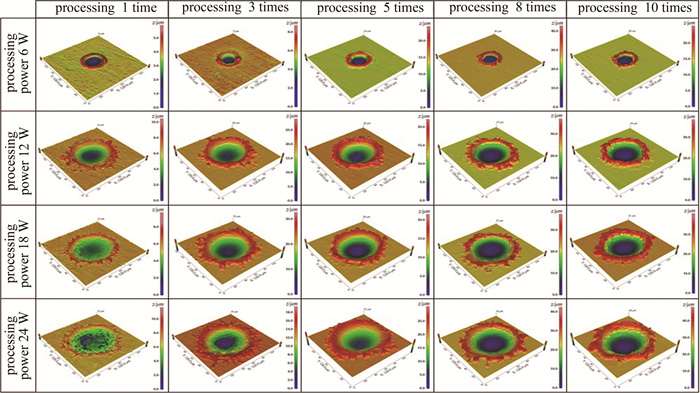
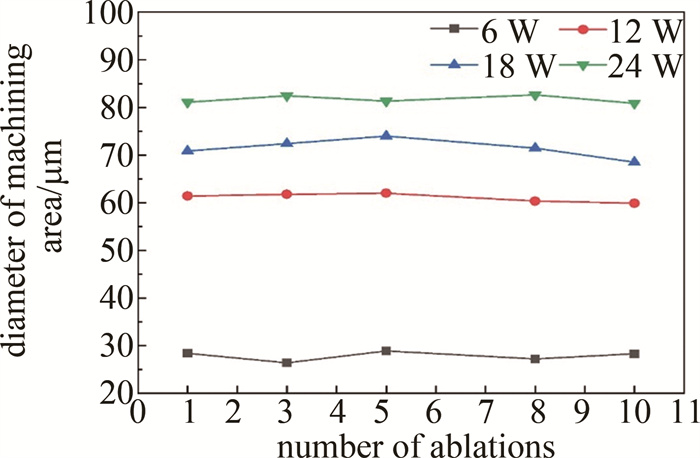
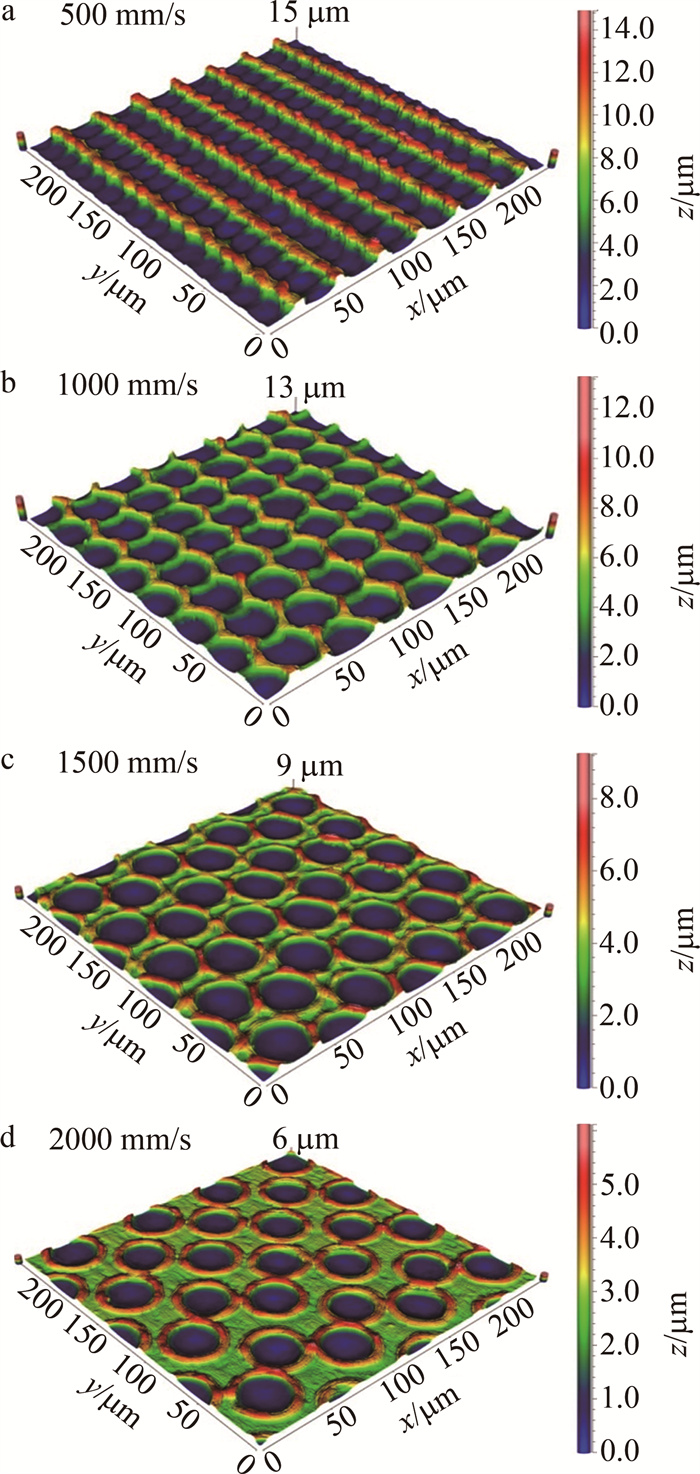
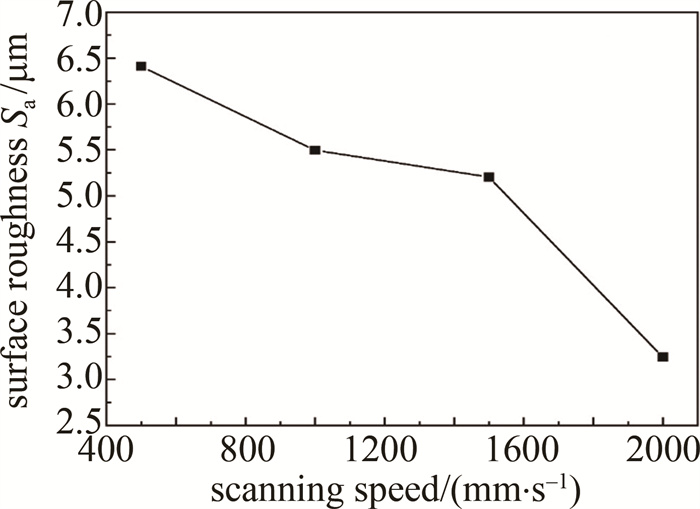
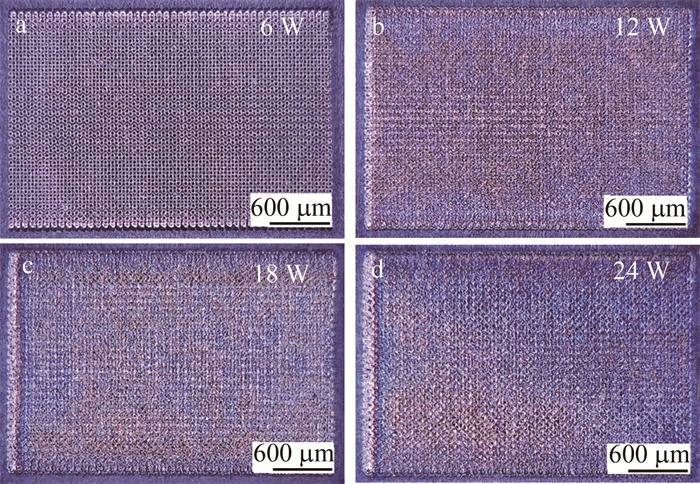
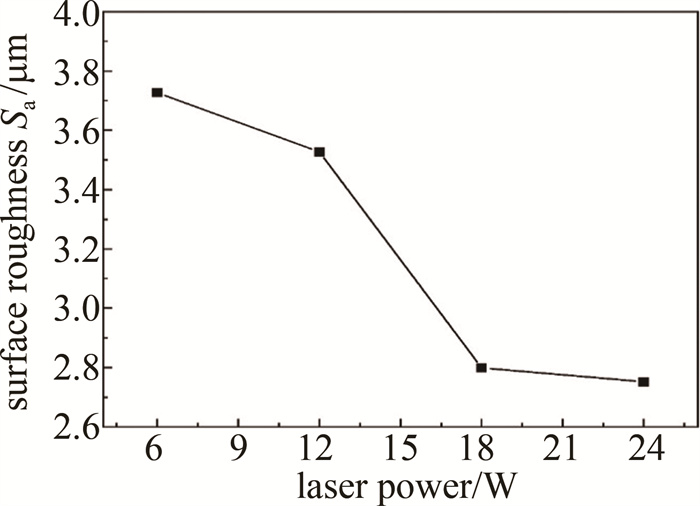
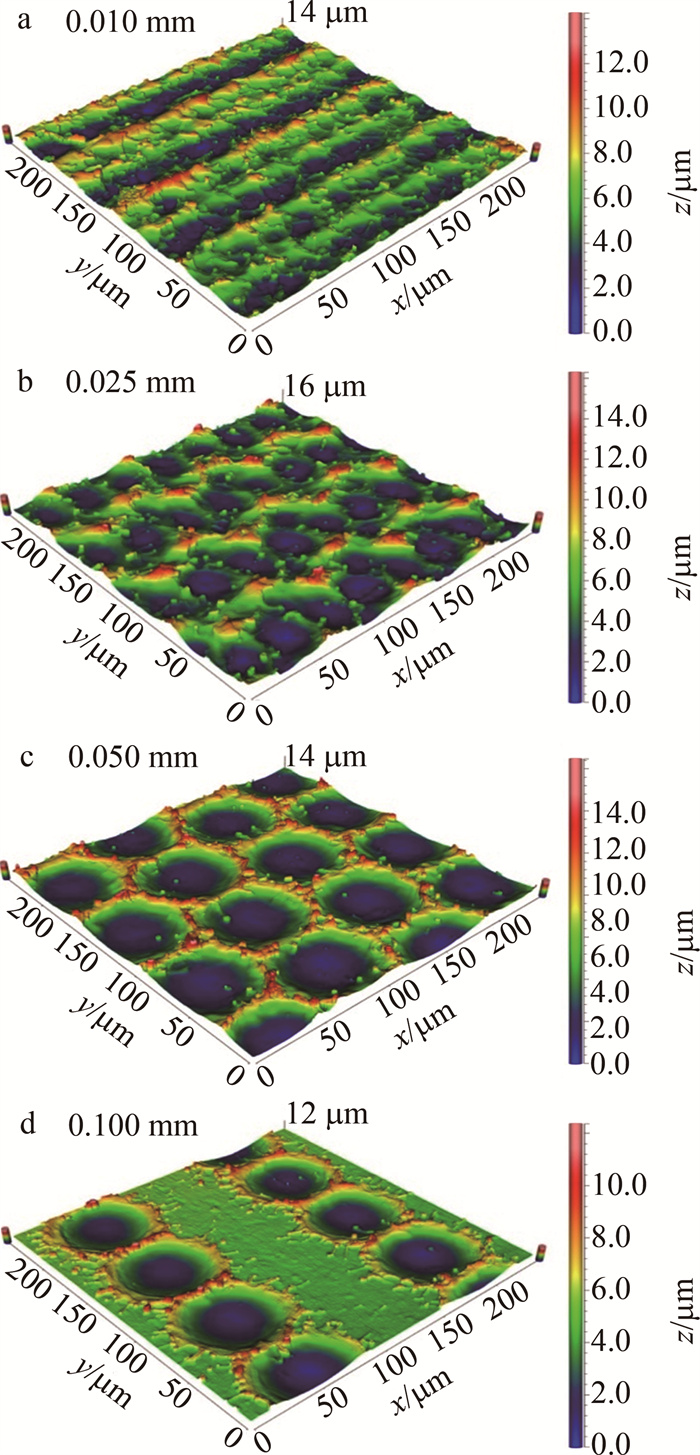
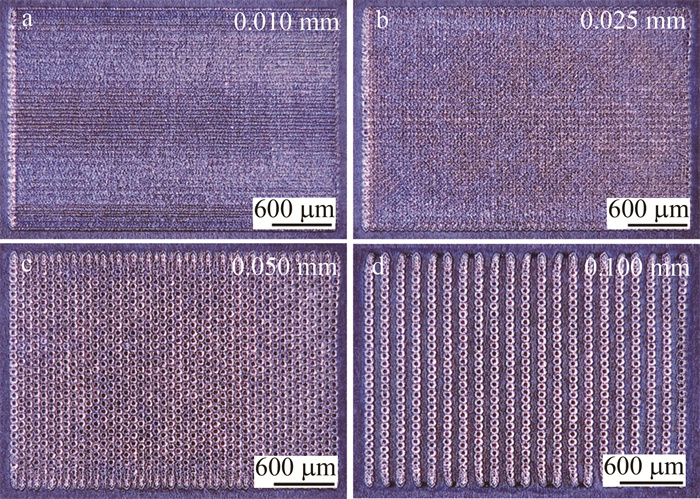
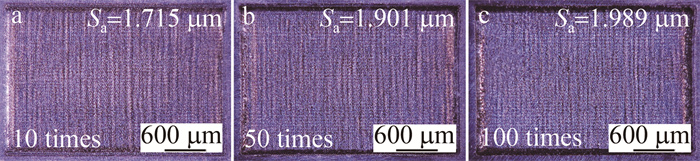
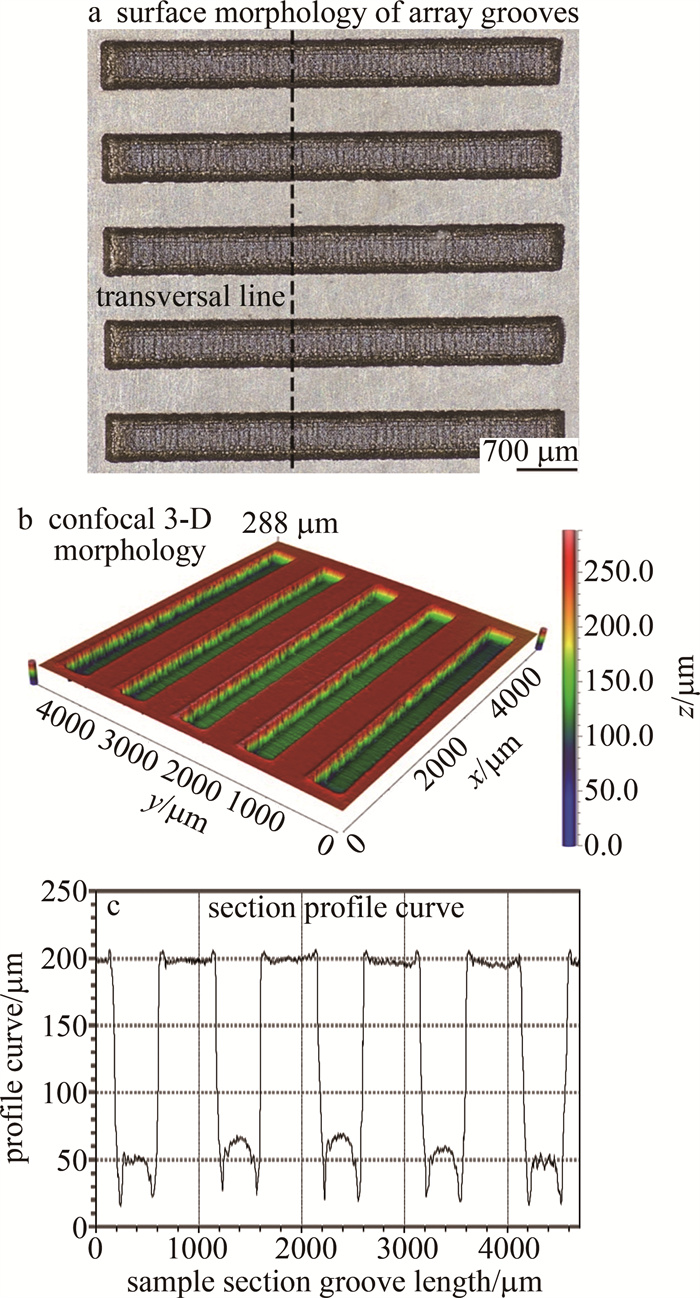
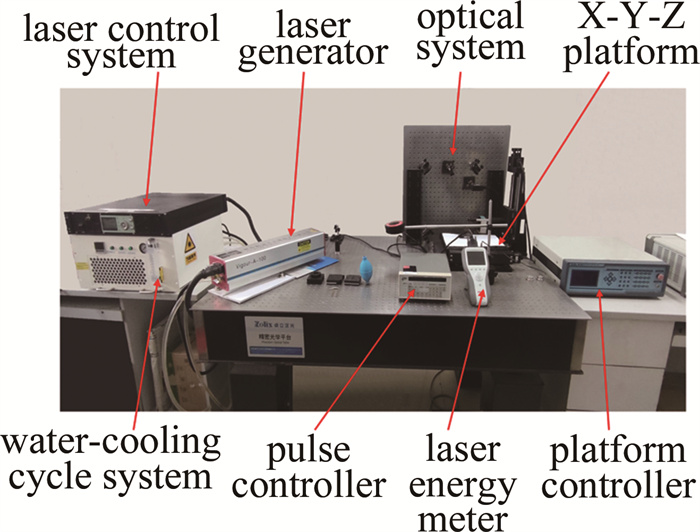
为了在钛合金表面加工高质量的微小结构,探究不同因素对表面质量的影响规律,利用纳秒激光开展钛合金Ti6Al4V加工实验研究。通过3维显微镜和共聚焦显微镜测量了不同参数下的钛合金工件加工表面形貌,利用正交实验和单因素分析法探究扫描速率、激光功率、扫描线间距对加工形貌和粗糙度值的影响规律。结果表明,在低功率、高速率、大线间距条件下,材料去除不连续,加工表面呈现间断的凹坑结构;随着功率的增加、加工速率的降低和线间距的减小,材料去除逐渐连续,加工后材料表面质量得到明显改善;选择激光功率24 W、扫描速率2000 mm/s、线间距0.01 mm的参数在钛合金表面成功加工出宽度500 μm、深度140 μm的阵列微沟槽结构。该研究对激光加工钛合金表面微小结构具有较好的实用价值。
为了在钛合金表面加工高质量的微小结构,探究不同因素对表面质量的影响规律,利用纳秒激光开展钛合金Ti6Al4V加工实验研究。通过3维显微镜和共聚焦显微镜测量了不同参数下的钛合金工件加工表面形貌,利用正交实验和单因素分析法探究扫描速率、激光功率、扫描线间距对加工形貌和粗糙度值的影响规律。结果表明,在低功率、高速率、大线间距条件下,材料去除不连续,加工表面呈现间断的凹坑结构;随着功率的增加、加工速率的降低和线间距的减小,材料去除逐渐连续,加工后材料表面质量得到明显改善;选择激光功率24 W、扫描速率2000 mm/s、线间距0.01 mm的参数在钛合金表面成功加工出宽度500 μm、深度140 μm的阵列微沟槽结构。该研究对激光加工钛合金表面微小结构具有较好的实用价值。

2024, 48(5): 691-697.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.012
摘要:
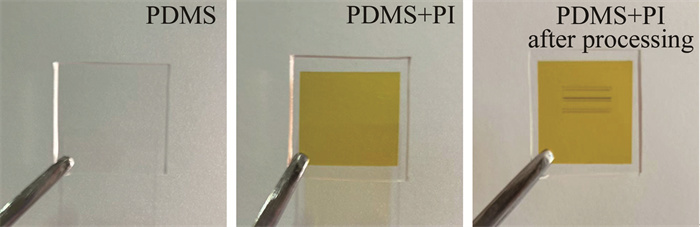
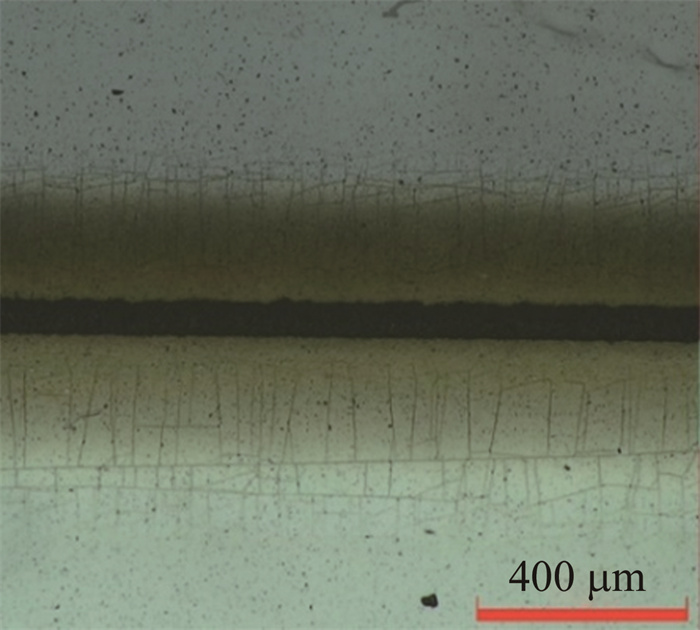
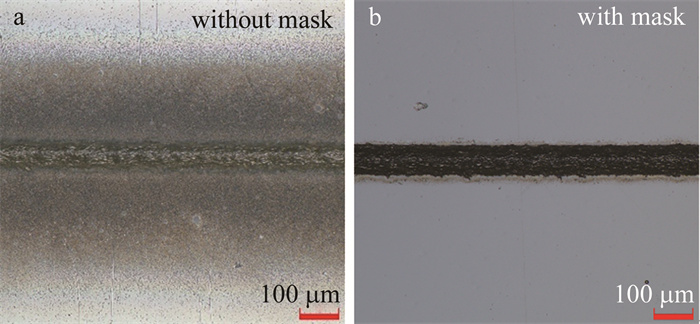
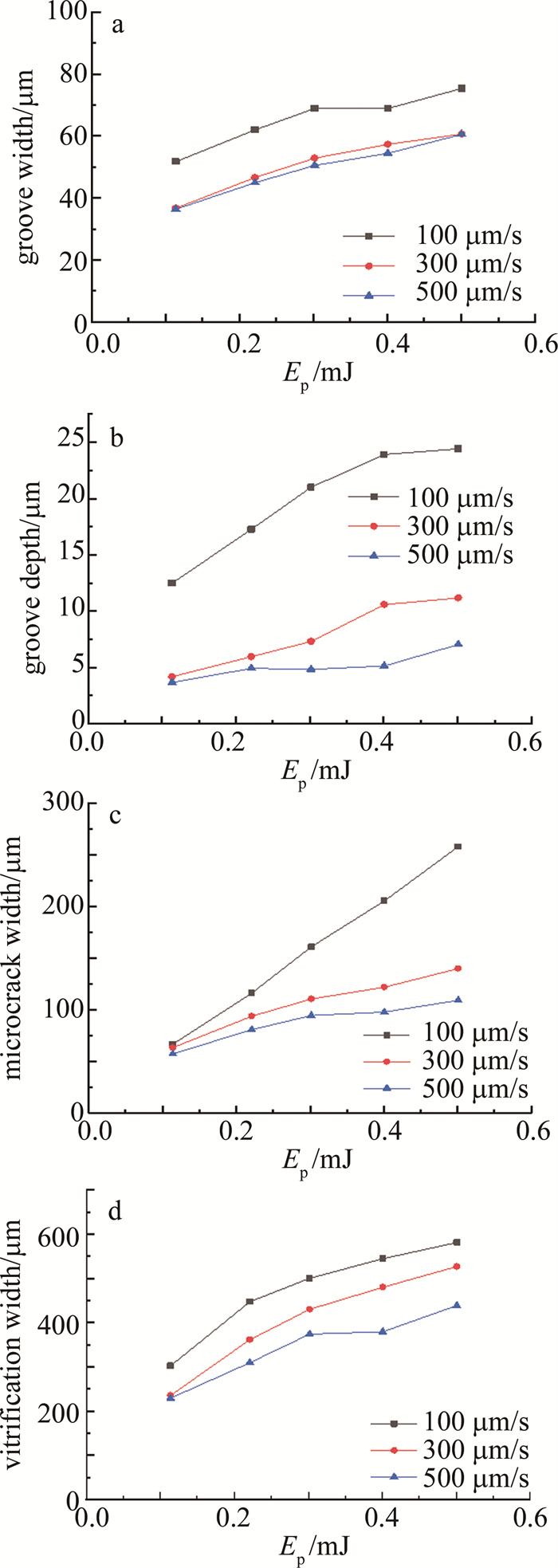
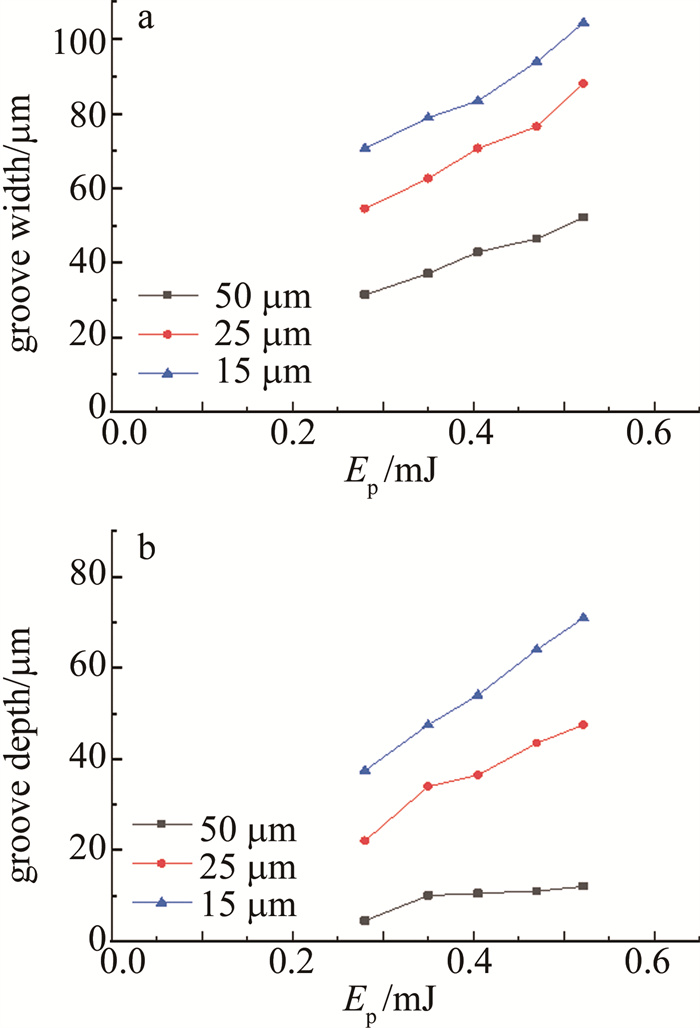
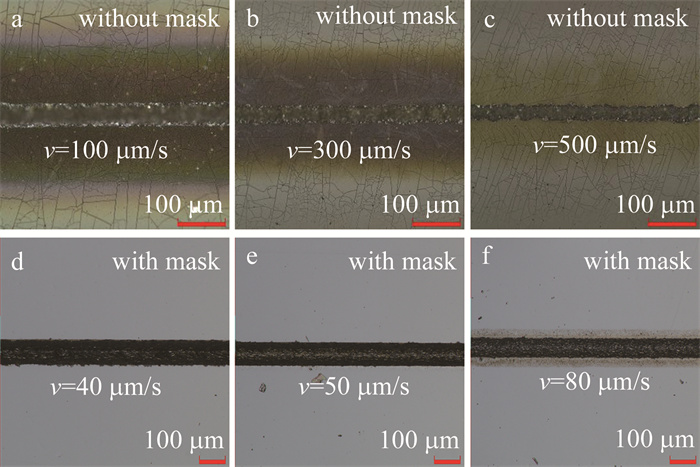
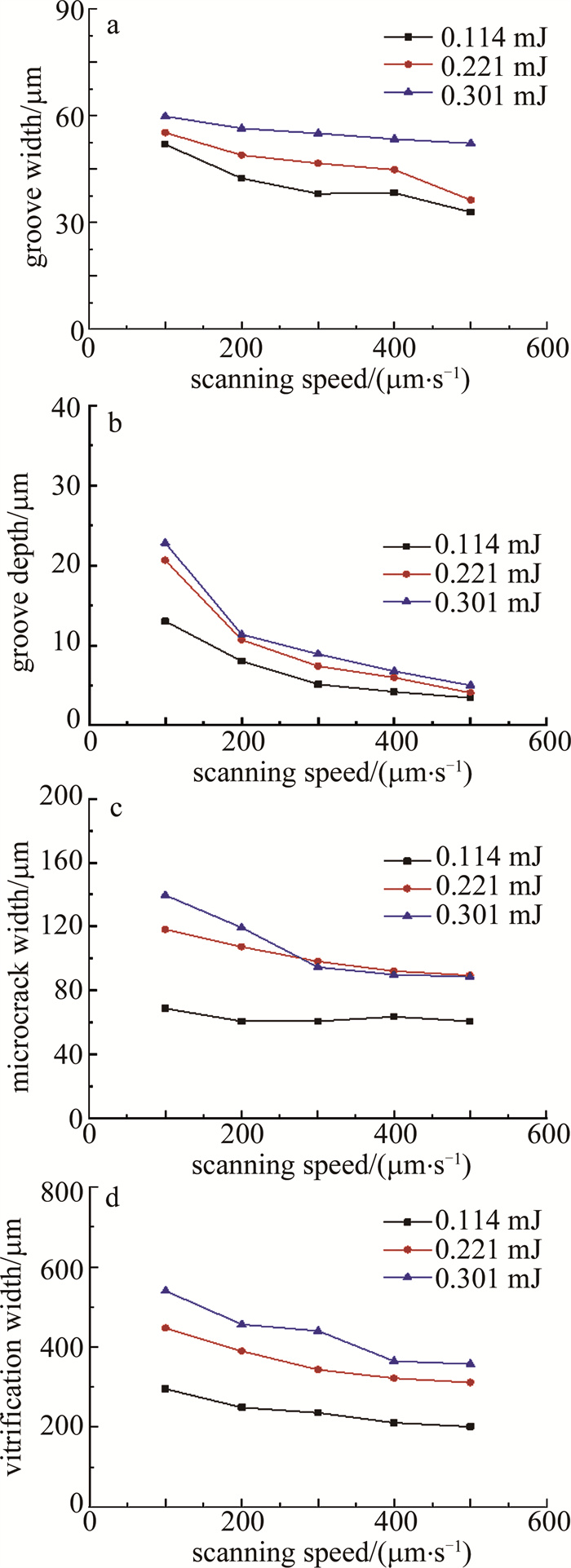
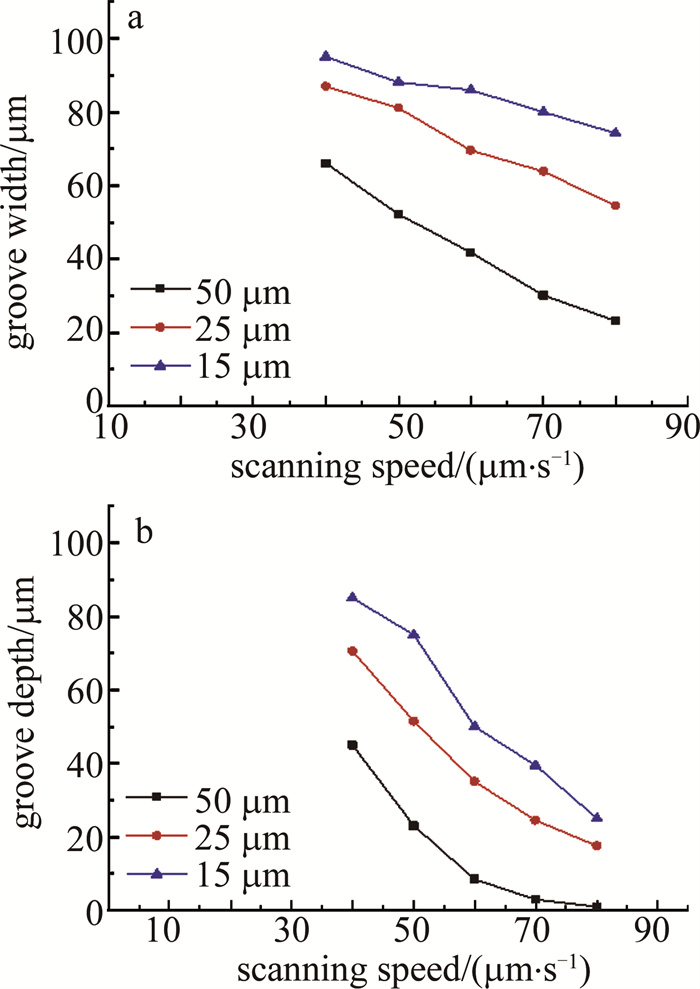
为了提高紫外纳秒固体激光切割聚二甲基硅氧烷(PDMS)的加工质量,提出了一种掩模辅助激光切割PDMS的方法。采用聚酰亚胺薄膜作为掩模材料,进行了无掩模及不同厚度掩模下紫外纳秒固体激光切割PDMS实验,分析了PDMS材料表面微裂纹的形成机理,获得了激光主要工艺参数对微槽的槽深、槽宽及加工质量的影响规律。结果表明,掩模条件下激光切割PDMS的表面加工质量较好,无微裂纹产生且玻璃态转化较少;槽深和槽宽均随激光脉冲能量、扫描速率的增加而增大;掩模厚度为15 μm和50 μm、扫描速率为40 μm/s和50 μm/s、脉冲能量高于0.40 mJ时,微槽表面热影响区较小。本研究为提高紫外纳秒固体激光切割PDMS的加工质量提供了一种方法。
为了提高紫外纳秒固体激光切割聚二甲基硅氧烷(PDMS)的加工质量,提出了一种掩模辅助激光切割PDMS的方法。采用聚酰亚胺薄膜作为掩模材料,进行了无掩模及不同厚度掩模下紫外纳秒固体激光切割PDMS实验,分析了PDMS材料表面微裂纹的形成机理,获得了激光主要工艺参数对微槽的槽深、槽宽及加工质量的影响规律。结果表明,掩模条件下激光切割PDMS的表面加工质量较好,无微裂纹产生且玻璃态转化较少;槽深和槽宽均随激光脉冲能量、扫描速率的增加而增大;掩模厚度为15 μm和50 μm、扫描速率为40 μm/s和50 μm/s、脉冲能量高于0.40 mJ时,微槽表面热影响区较小。本研究为提高紫外纳秒固体激光切割PDMS的加工质量提供了一种方法。

2024, 48(5): 734-738.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.018
摘要:
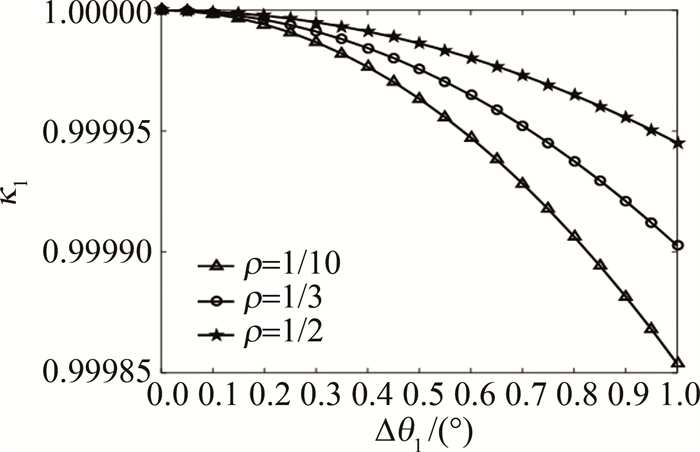
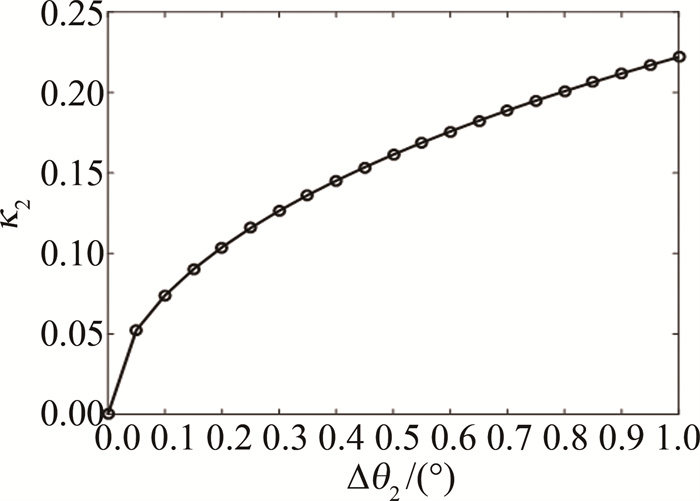
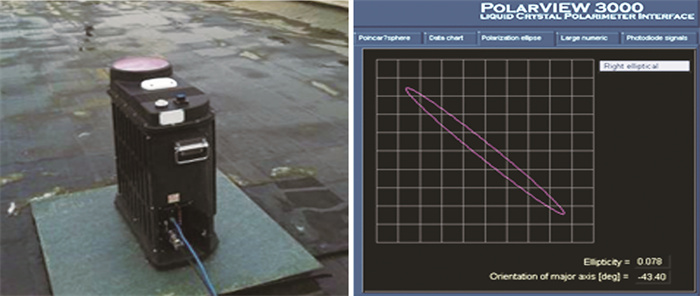
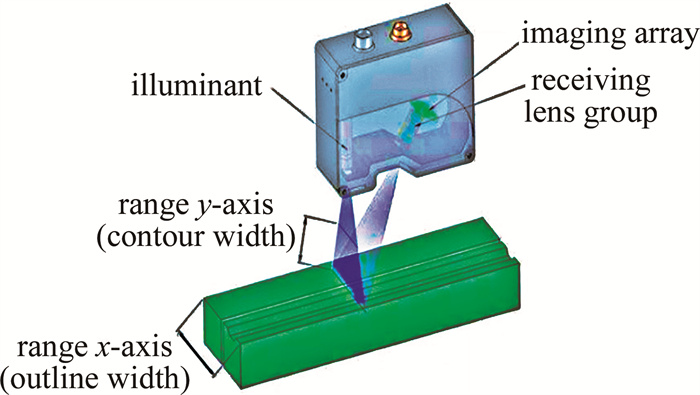
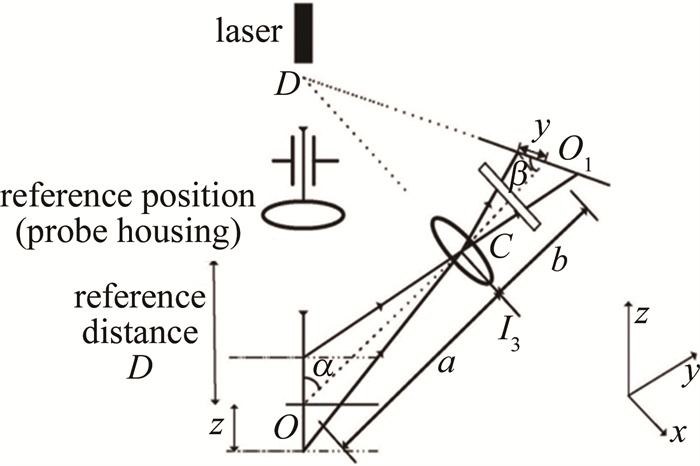
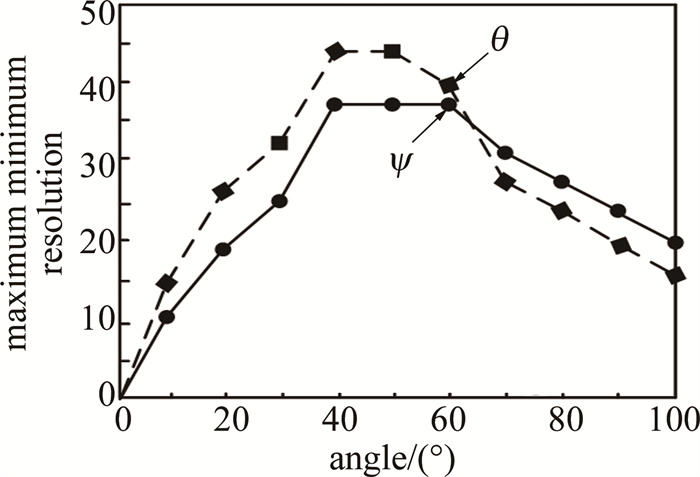
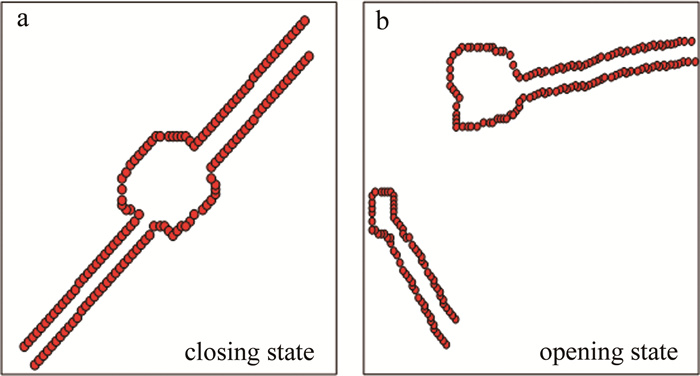
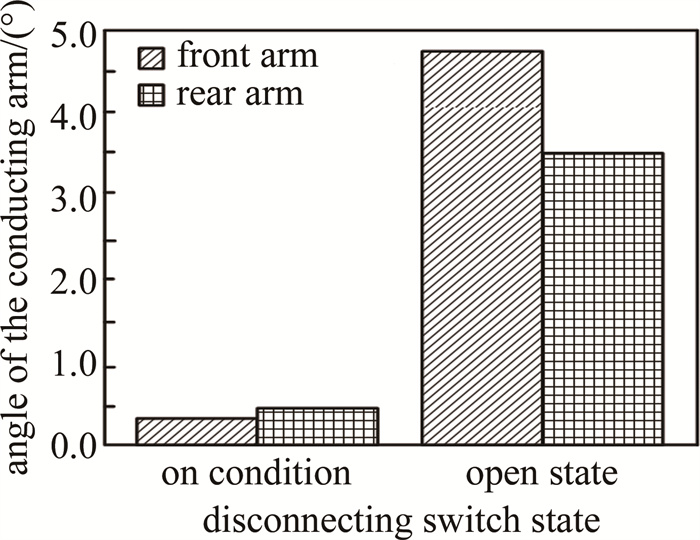
为了提升隔离开关合闸状态自动检测效果,采用了基于激光位移传感器的隔离开关合闸状态非接触自动检测方法, 使激光位移传感器的分辨率达到最大值,优化了激光位移传感器的光学参数,提升了其位移测量精度;通过光学参数优化后的激光位移传感器,采集隔离开关轮廓曲线,得到隔离开关轮廓曲线采样点集;利用最小二乘法拟合隔离开关轮廓曲线采样点的椭圆方程,并计算隔离开关导电臂与水平方向的夹角;当导电臂夹角处于规定夹角区间内,则判定合理开关合闸到位,完成隔离开关合闸状态非接触自动检测。结果表明, 该方法计算的前、后导电臂夹角分别在0.4°与0.5°左右,均低于夹角规定区间。这一结果对实现隔离开关合闸状态非接触自动检测是有帮助的。
为了提升隔离开关合闸状态自动检测效果,采用了基于激光位移传感器的隔离开关合闸状态非接触自动检测方法, 使激光位移传感器的分辨率达到最大值,优化了激光位移传感器的光学参数,提升了其位移测量精度;通过光学参数优化后的激光位移传感器,采集隔离开关轮廓曲线,得到隔离开关轮廓曲线采样点集;利用最小二乘法拟合隔离开关轮廓曲线采样点的椭圆方程,并计算隔离开关导电臂与水平方向的夹角;当导电臂夹角处于规定夹角区间内,则判定合理开关合闸到位,完成隔离开关合闸状态非接触自动检测。结果表明, 该方法计算的前、后导电臂夹角分别在0.4°与0.5°左右,均低于夹角规定区间。这一结果对实现隔离开关合闸状态非接触自动检测是有帮助的。
2024, 48(5): 746-751.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.020
摘要:
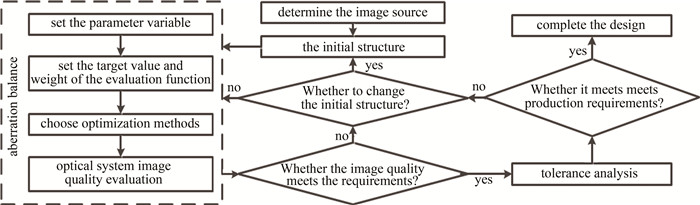
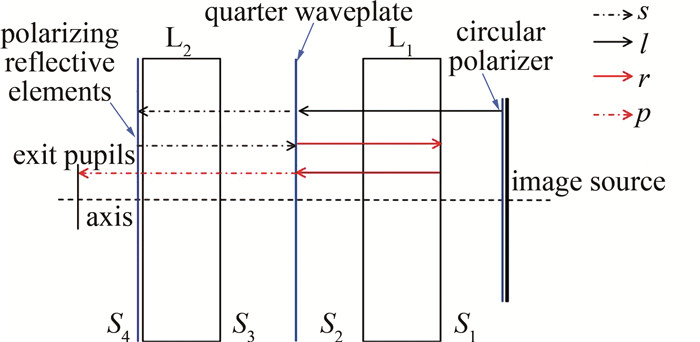
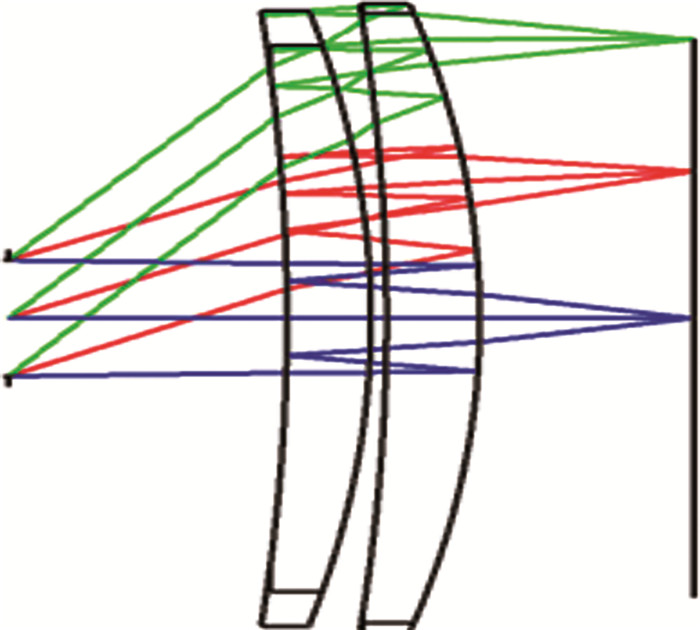
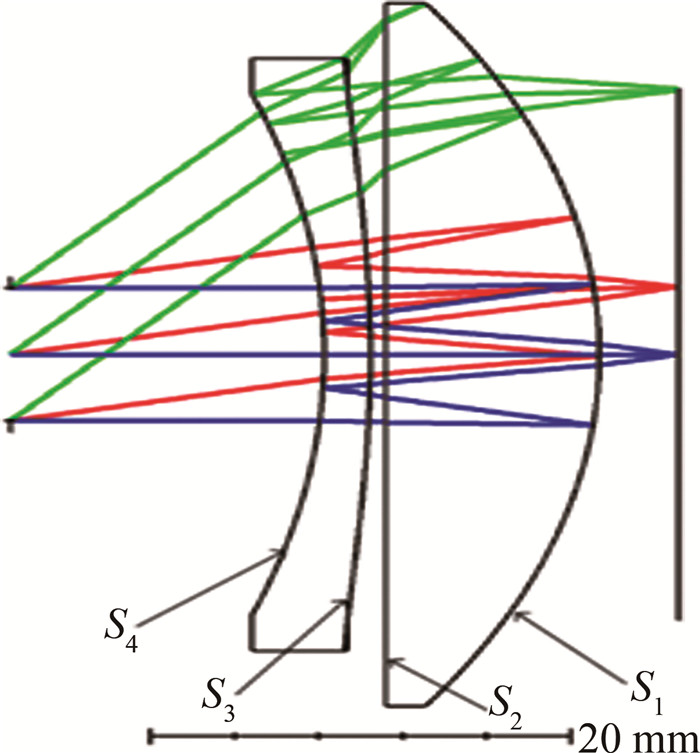
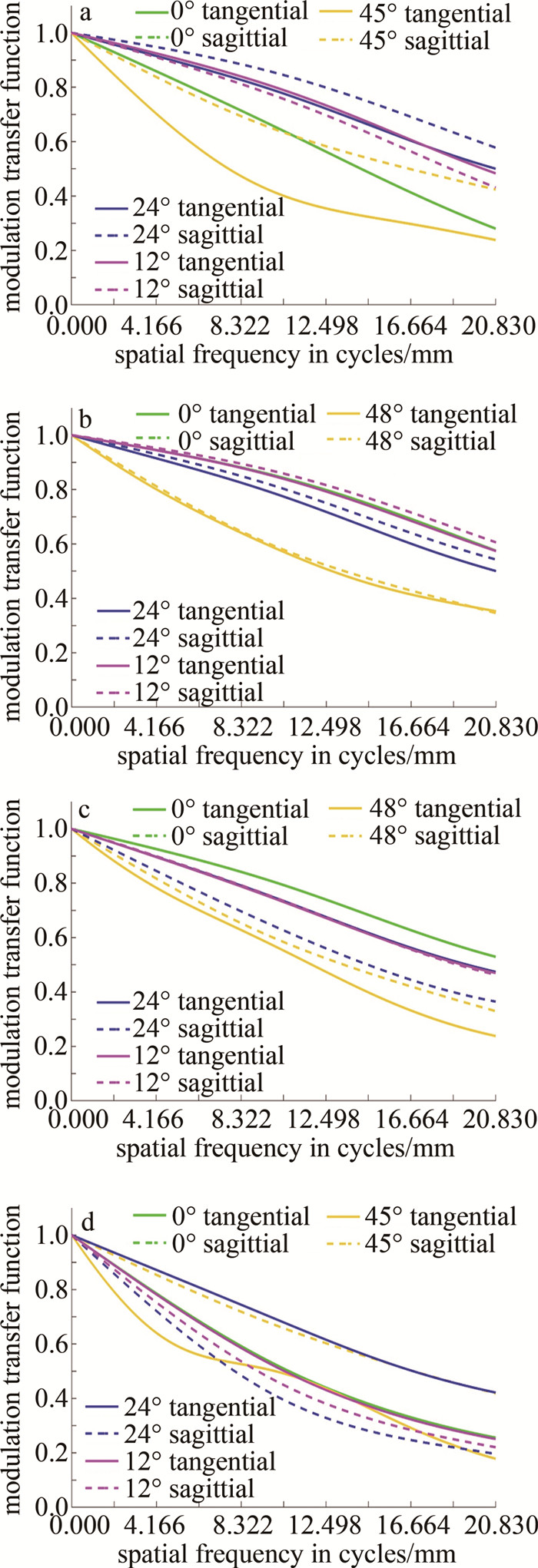
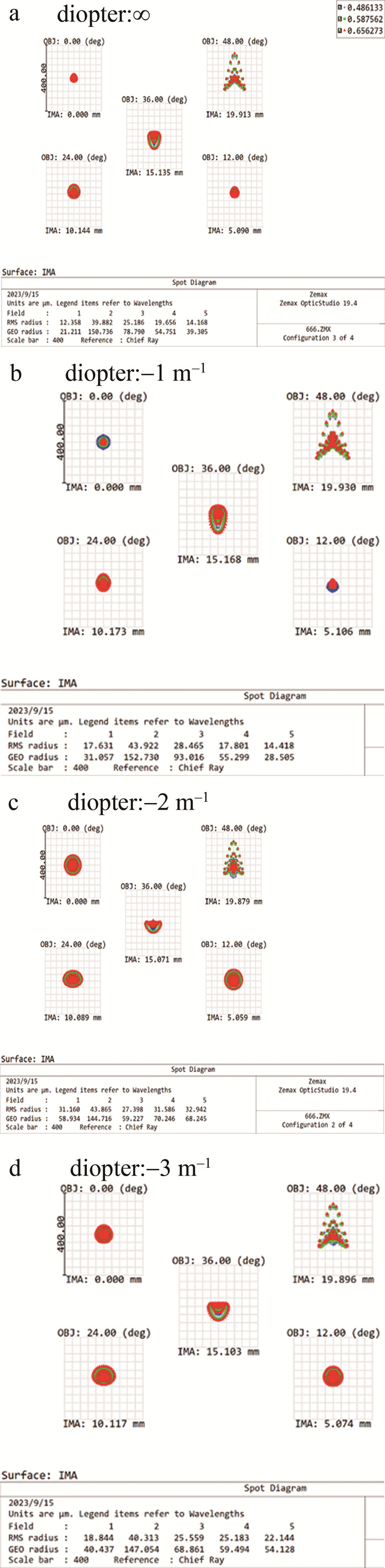
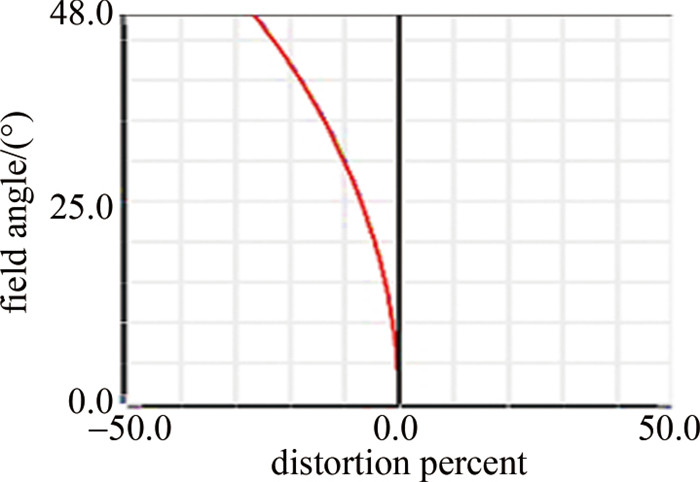
为了满足虚拟现实头戴显示器大视场、大出瞳和高成像质量且结构轻小化等要求,采用逆向光路设计方法,对折叠光路pancake结构展开研究;采用两片透镜进行设计,进行了理论分析和软件仿真,对设计的光学系统进行了公差分析。结果表明,全视场角为96°、出瞳直径为10 mm、出瞳距离为14.94 mm时,在奈奎斯特频率(20.83 lp/mm)处调制传递函数(MTF)大于0.2,最大畸变为-26.5%,最大垂轴色差为13.84 μm;此结构具有更高的MTF值、更小的垂轴色差和弥散斑均方根半径,像差平衡合理。该研究为折叠光路结构的头戴显示器提供了参考。
为了满足虚拟现实头戴显示器大视场、大出瞳和高成像质量且结构轻小化等要求,采用逆向光路设计方法,对折叠光路pancake结构展开研究;采用两片透镜进行设计,进行了理论分析和软件仿真,对设计的光学系统进行了公差分析。结果表明,全视场角为96°、出瞳直径为10 mm、出瞳距离为14.94 mm时,在奈奎斯特频率(20.83 lp/mm)处调制传递函数(MTF)大于0.2,最大畸变为-26.5%,最大垂轴色差为13.84 μm;此结构具有更高的MTF值、更小的垂轴色差和弥散斑均方根半径,像差平衡合理。该研究为折叠光路结构的头戴显示器提供了参考。

2024, 48(5): 759-764.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.022
摘要:
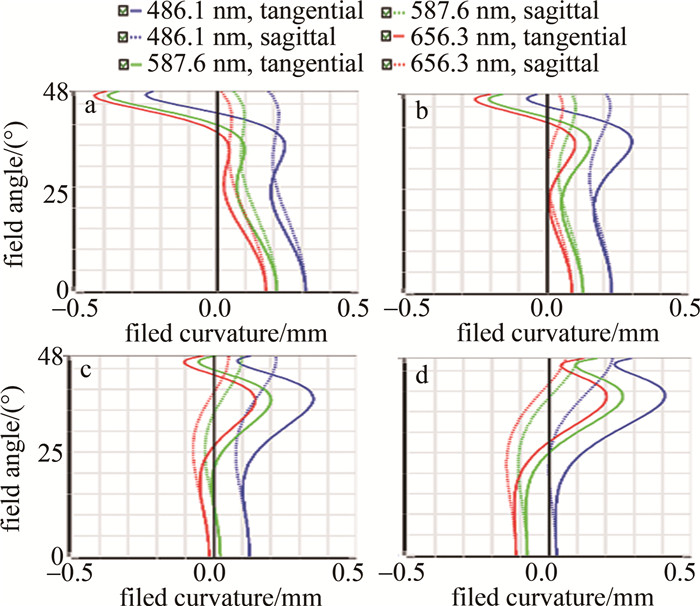
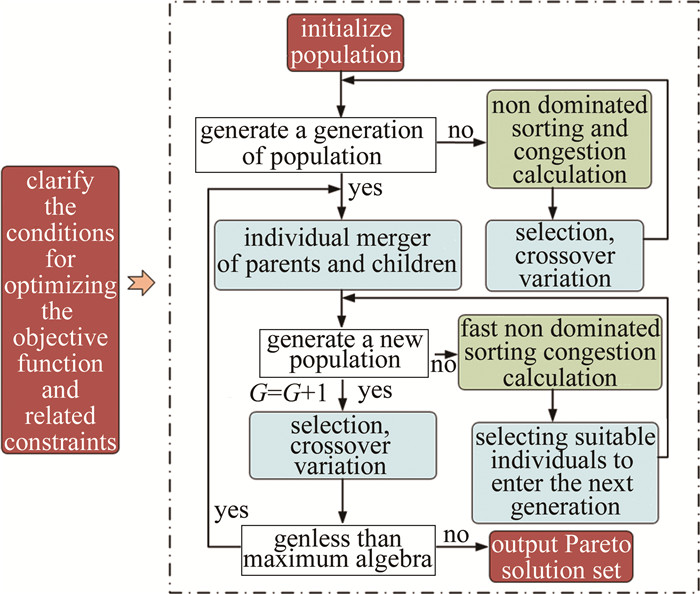
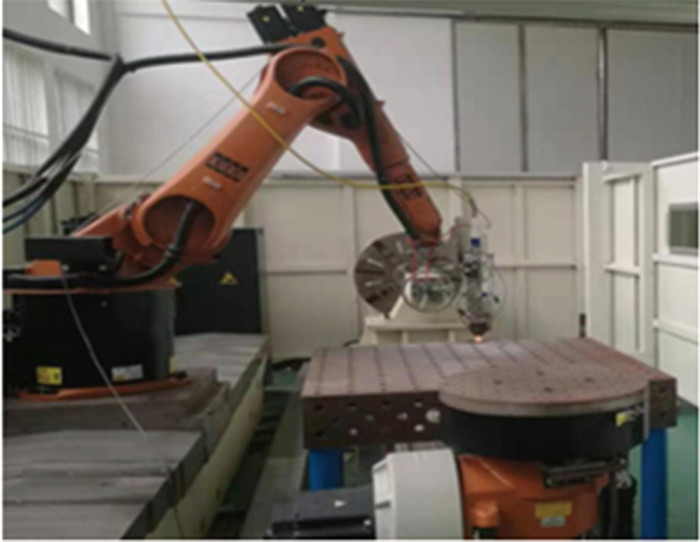
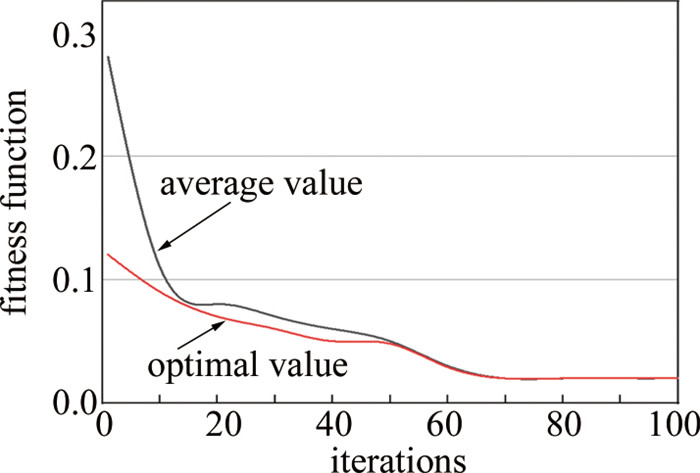
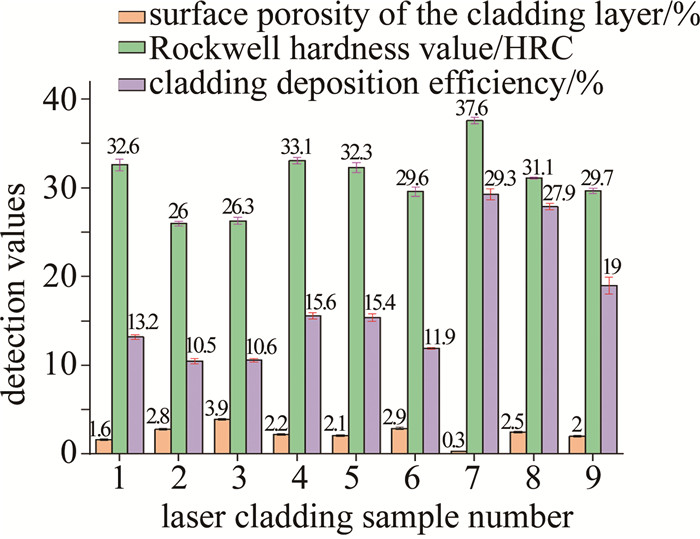
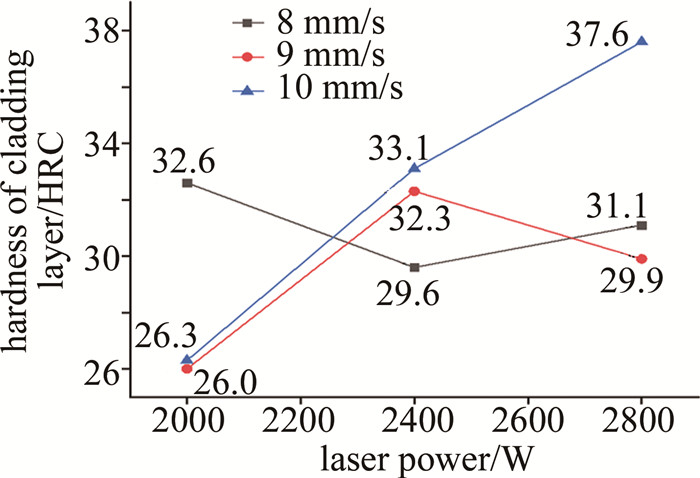
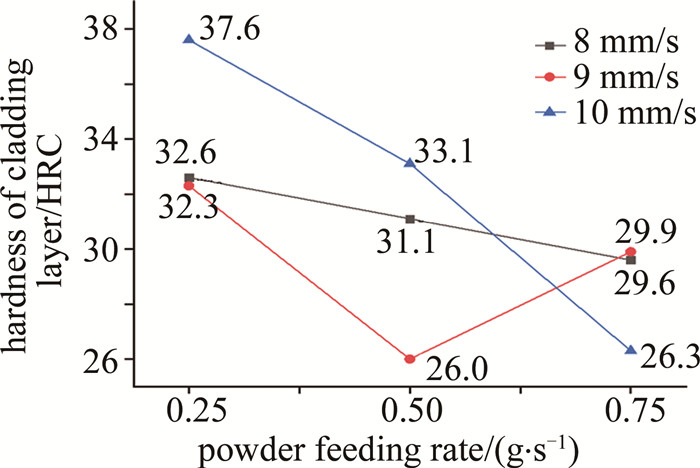
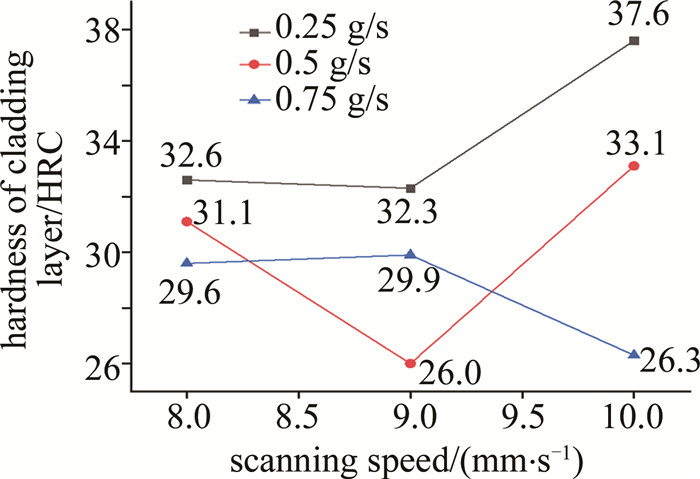
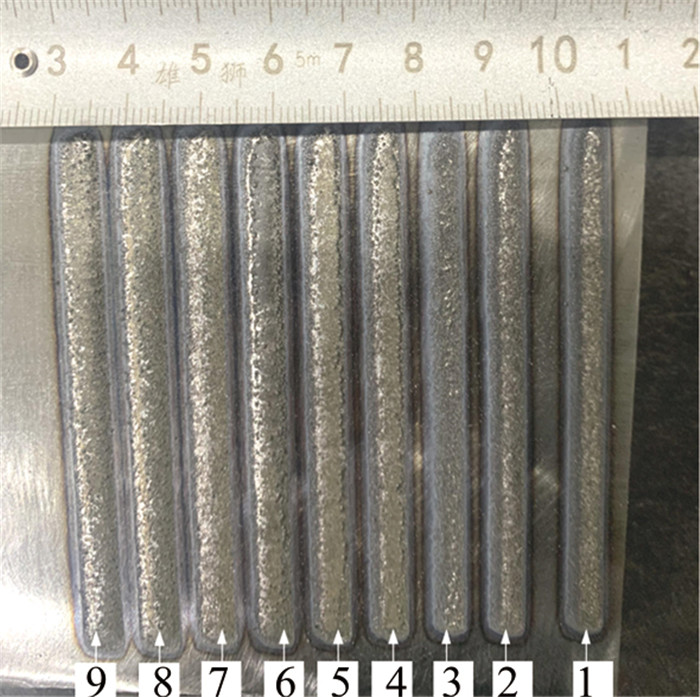
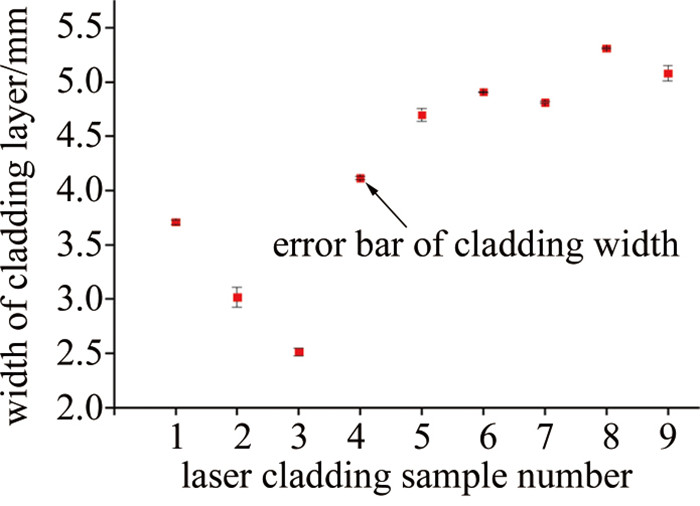
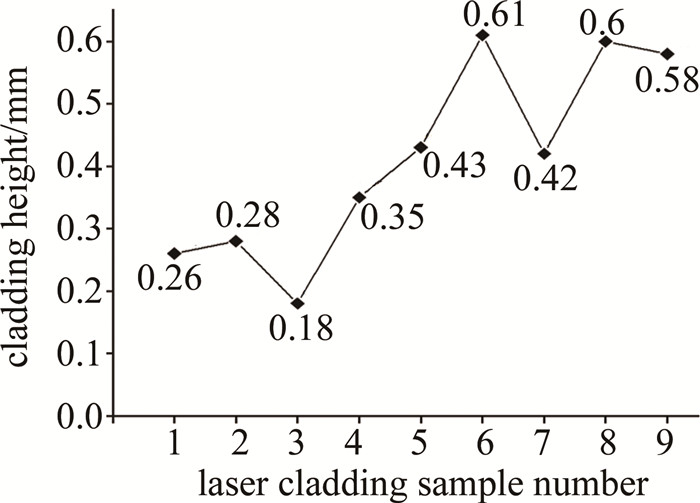
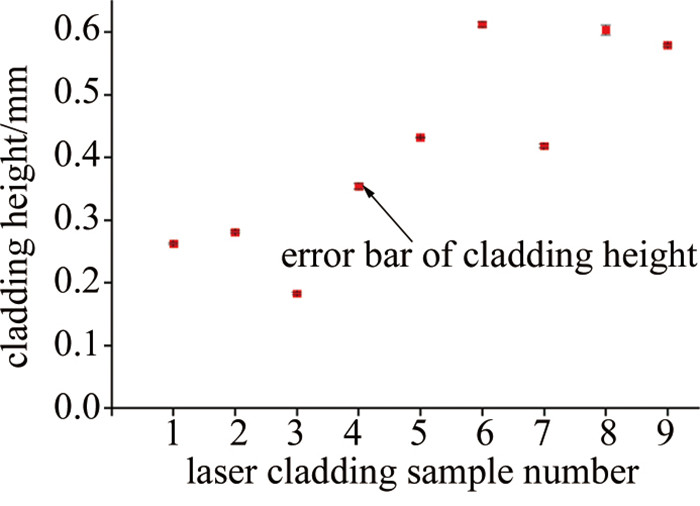
为了提升HT250灰铸铁材料的综合性能,采用遗传算法对多目标工艺参数进行优化,得出相应经验参数组,在灰铸铁材料表面进行激光熔覆316L合金实验;采用数字化检测仪器,根据试样几何形状、宏观形貌、硬度等变化规律,得出最优工艺参数组。结果表明,当设置送粉速率为0.25 g/s、扫描速率为10 mm/s、激光功率为2800 W时,316L熔覆层表面几何形状最佳,宏观形貌好,洛氏硬度最大值达37.6 HRC,试样熔覆性能良好。这一结果综合提高了灰铸铁的各项性能,为灰铸铁产品磨损后的修复再利用提供实践参考。
为了提升HT250灰铸铁材料的综合性能,采用遗传算法对多目标工艺参数进行优化,得出相应经验参数组,在灰铸铁材料表面进行激光熔覆316L合金实验;采用数字化检测仪器,根据试样几何形状、宏观形貌、硬度等变化规律,得出最优工艺参数组。结果表明,当设置送粉速率为0.25 g/s、扫描速率为10 mm/s、激光功率为2800 W时,316L熔覆层表面几何形状最佳,宏观形貌好,洛氏硬度最大值达37.6 HRC,试样熔覆性能良好。这一结果综合提高了灰铸铁的各项性能,为灰铸铁产品磨损后的修复再利用提供实践参考。

2024, 48(5): 628-636.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.003
摘要:
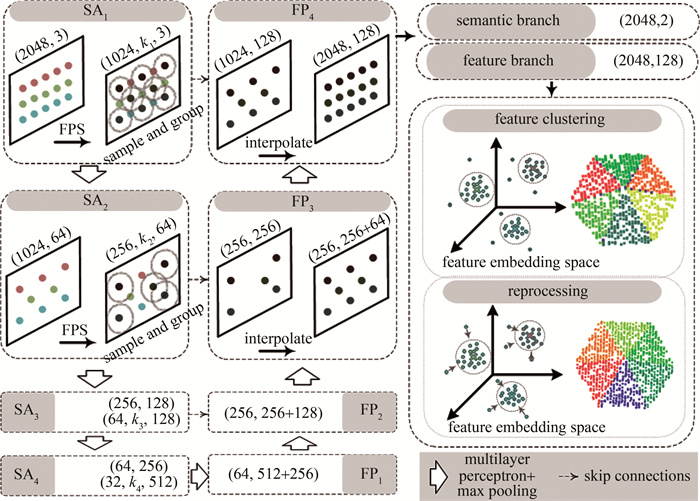
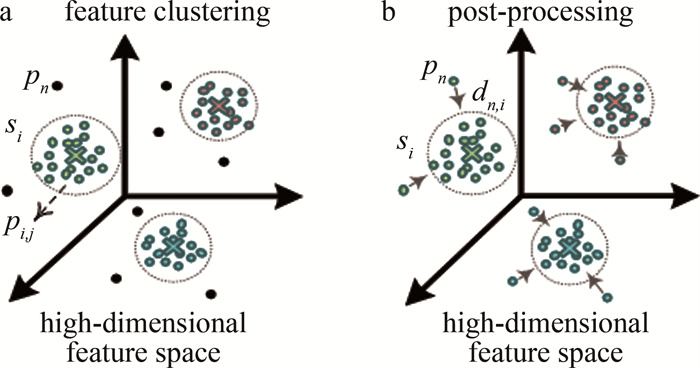
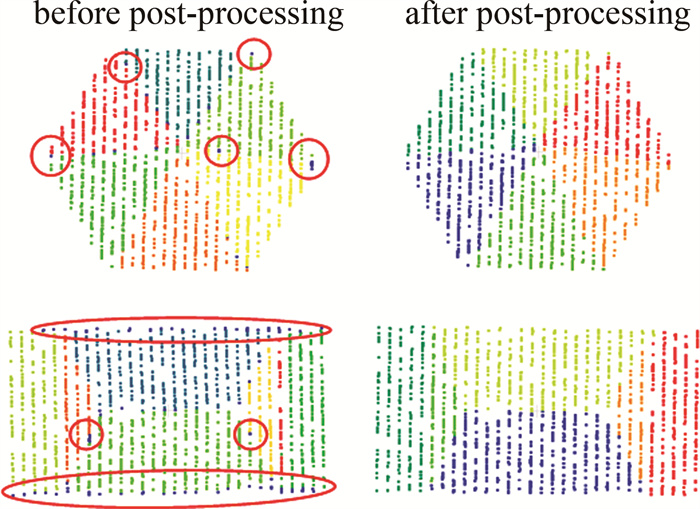
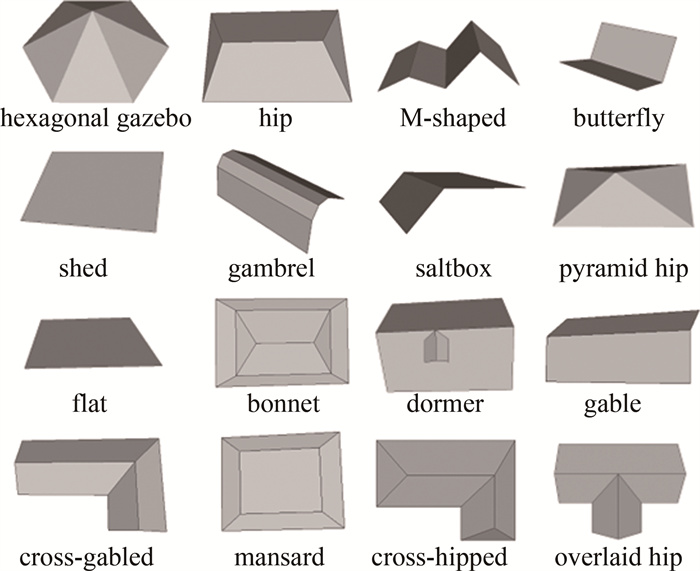
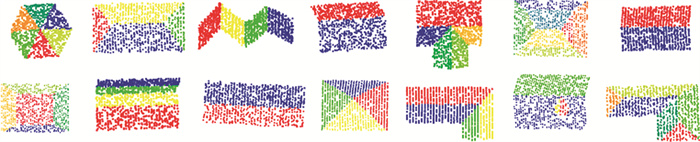
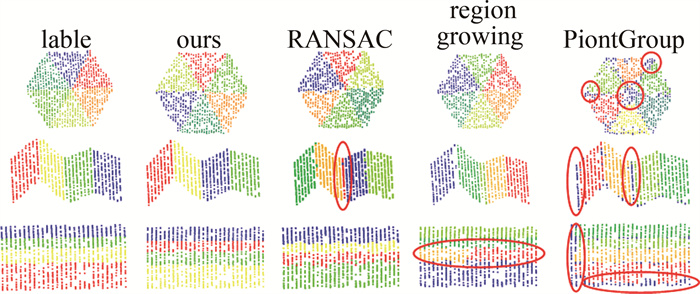
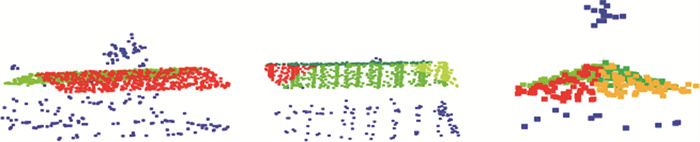
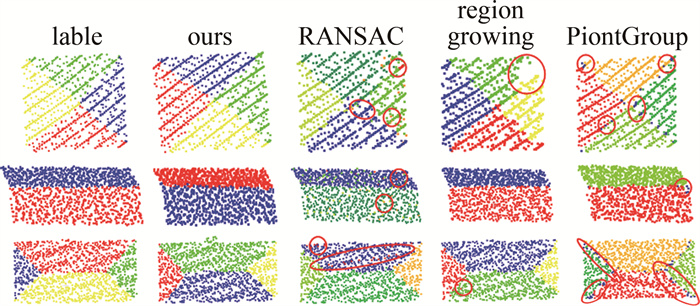
为了准确提取不同类型建筑物屋顶点云的各个平面,采用度量学习的方式,将每个平面视为单独的实例,为每个平面上的点学习单独的高维深度特征。利用所提取的高维深度特征对平面点进行初步的聚类,通过简单的欧氏距离和特征空间距离进行综合度量将未聚类的点分配至各个平面;所提出的方法分别在合成数据集和公开的机载点云建筑物屋顶数据集RoofN3D上进行了训练和测试。结果表明,在合成数据集上,所提取的建筑物平面的准确率、召回率和F1分数分别为0.990、0.998和0.994;在机载点云数据集RoofN3D上,所提取的建筑物平面的准确率、召回率和F1分数分别为0.945、0.971和0.957。该方法不仅可以准确有效地提取出不同建筑物屋顶平面,且平面边缘非常准确,还可以准确区分建筑物屋顶平面内容和非平面内容,为建筑物3维建模提供重要帮助。
为了准确提取不同类型建筑物屋顶点云的各个平面,采用度量学习的方式,将每个平面视为单独的实例,为每个平面上的点学习单独的高维深度特征。利用所提取的高维深度特征对平面点进行初步的聚类,通过简单的欧氏距离和特征空间距离进行综合度量将未聚类的点分配至各个平面;所提出的方法分别在合成数据集和公开的机载点云建筑物屋顶数据集RoofN3D上进行了训练和测试。结果表明,在合成数据集上,所提取的建筑物平面的准确率、召回率和F1分数分别为0.990、0.998和0.994;在机载点云数据集RoofN3D上,所提取的建筑物平面的准确率、召回率和F1分数分别为0.945、0.971和0.957。该方法不仅可以准确有效地提取出不同建筑物屋顶平面,且平面边缘非常准确,还可以准确区分建筑物屋顶平面内容和非平面内容,为建筑物3维建模提供重要帮助。
2024, 48(5): 705-710.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.014
摘要:
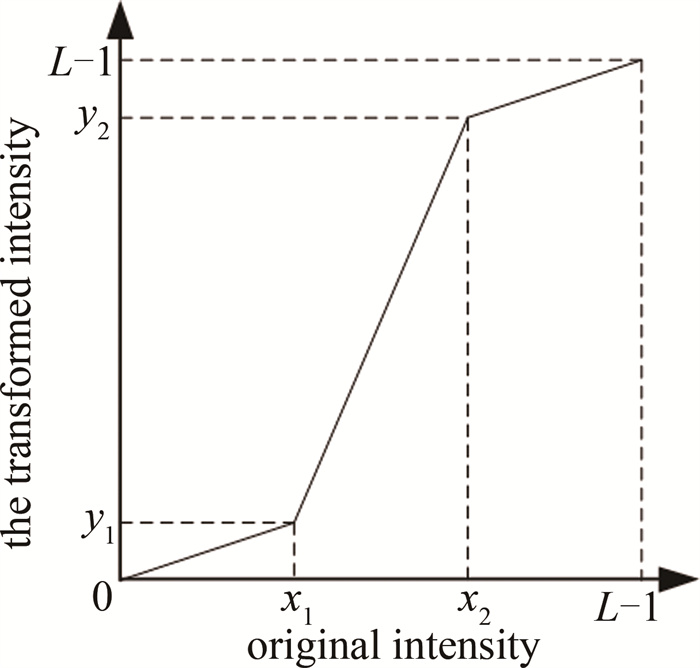
为了改善红外图像的效果,提升对比度和清晰度,丰富边缘细节信息,提出了融合线性变换和局部均衡的红外图像增强方法。利用图像的像素值分布,对像素值进行自适应的分段线性变换,并用局部的直方图均衡增强图像;分别计算两张增强图像的权重图。对比度权重、显著性权重和亮度分布权重;以拉普拉斯金字塔和高斯金字塔的方式,分别对增强图像和权重图进行分解,将分解的图像与权重图进行多尺度线性融合,获得效果理想的增强图像。结果表明,相对于现有方法,本文中提出的方法增强图像的视觉效果更清晰,信息熵、平均梯度和变异系数分别比现有方法高出9.03%、23.87%和9.97%以上。该研究可更有效地提高红外图像增强的性能。
为了改善红外图像的效果,提升对比度和清晰度,丰富边缘细节信息,提出了融合线性变换和局部均衡的红外图像增强方法。利用图像的像素值分布,对像素值进行自适应的分段线性变换,并用局部的直方图均衡增强图像;分别计算两张增强图像的权重图。对比度权重、显著性权重和亮度分布权重;以拉普拉斯金字塔和高斯金字塔的方式,分别对增强图像和权重图进行分解,将分解的图像与权重图进行多尺度线性融合,获得效果理想的增强图像。结果表明,相对于现有方法,本文中提出的方法增强图像的视觉效果更清晰,信息熵、平均梯度和变异系数分别比现有方法高出9.03%、23.87%和9.97%以上。该研究可更有效地提高红外图像增强的性能。
2024, 48(5): 711-718.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.015
摘要:
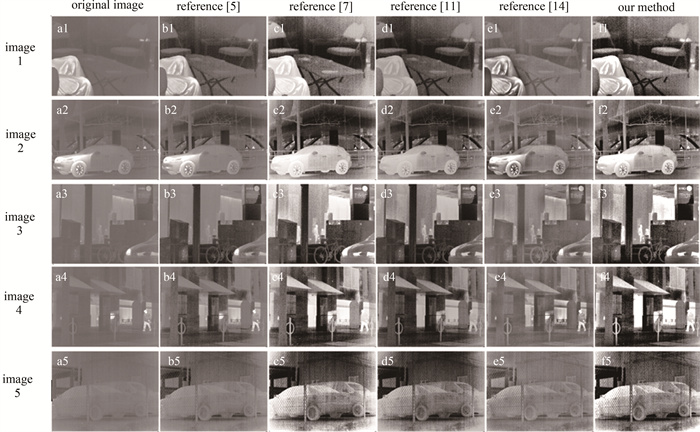
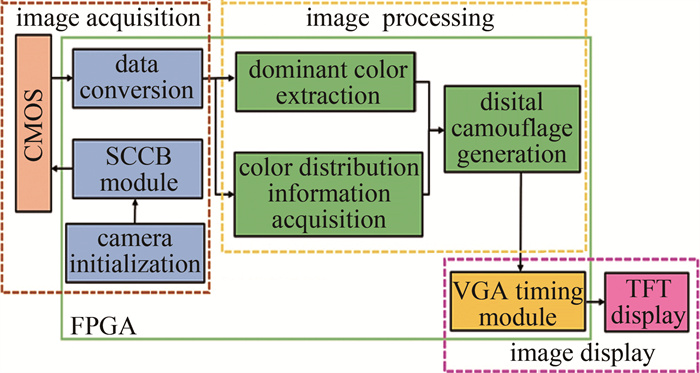
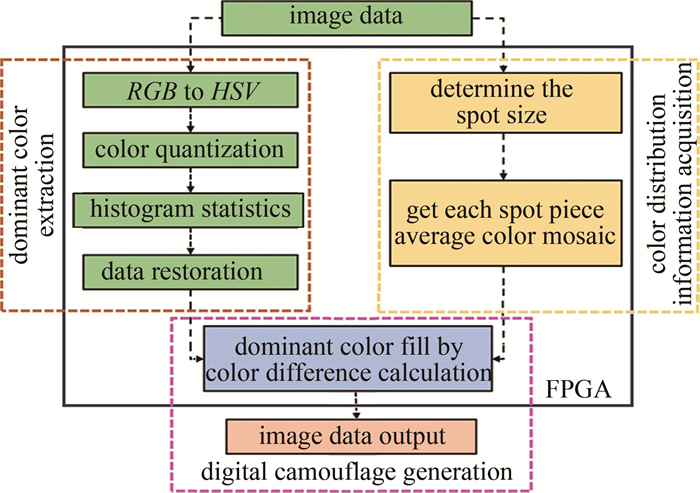
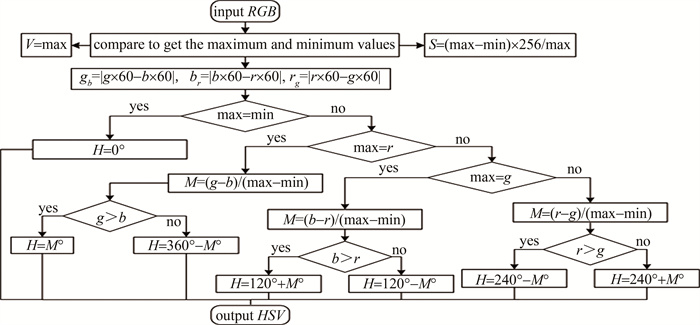
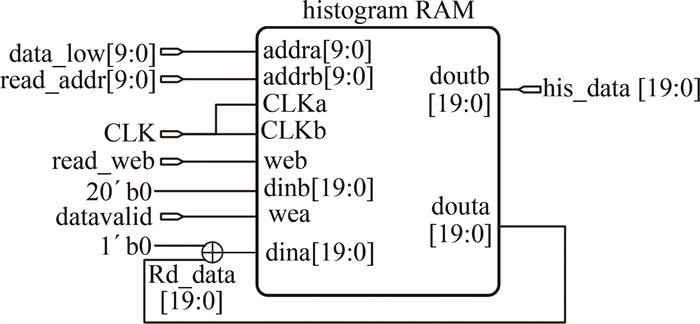
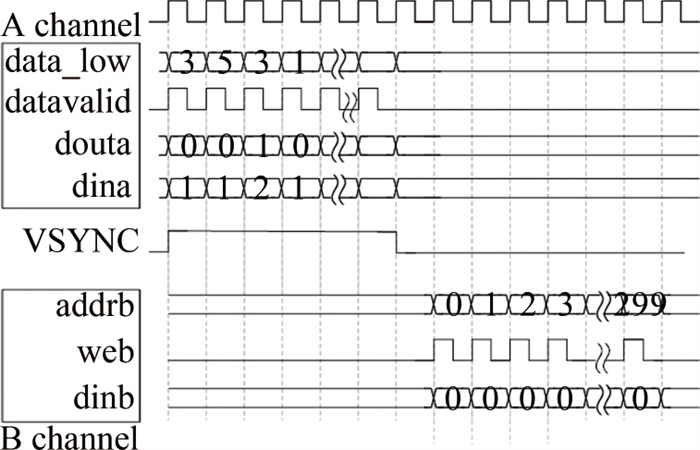
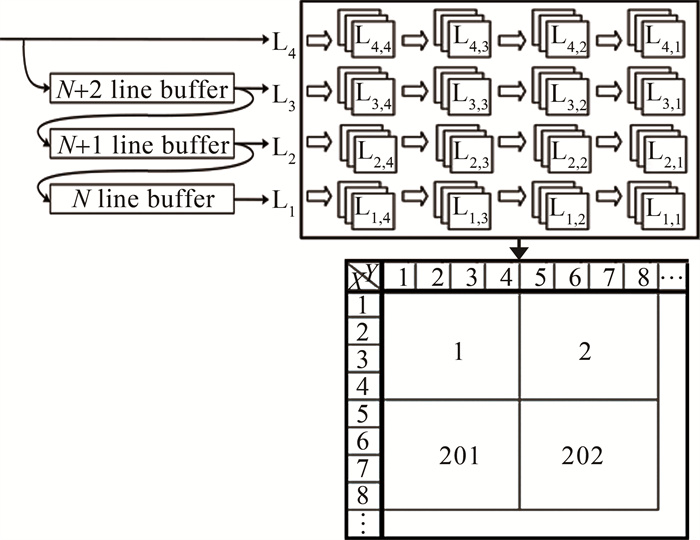
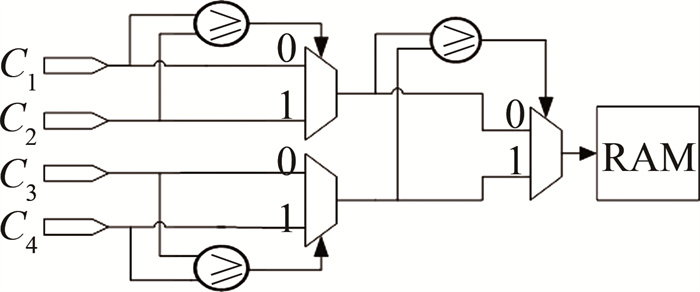
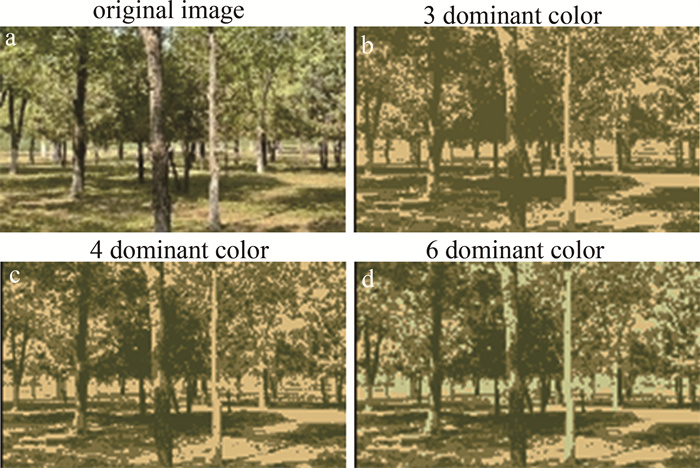
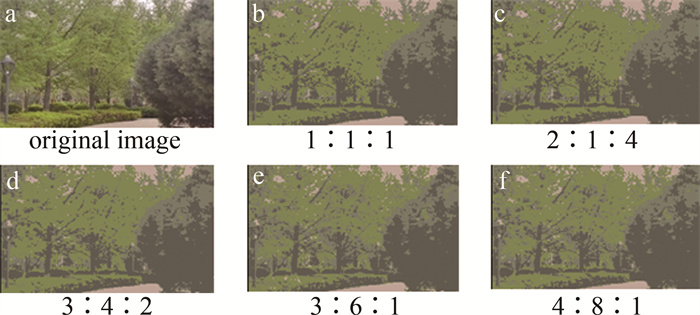
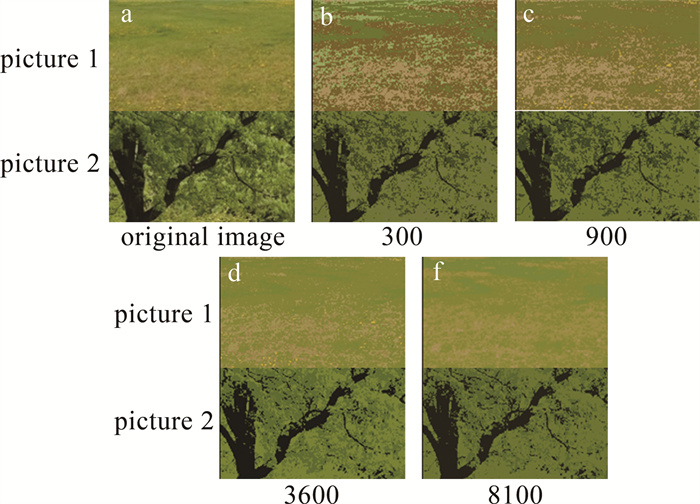
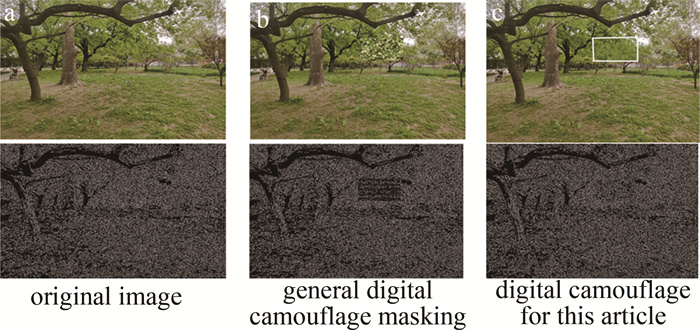
为了解决传统仿造数码迷彩生成算法开发平台灵活性不足的问题,提出了一种基于现场可编程门阵列(FPGA)的仿造数码迷彩生成算法。采用直方图统计提取主要颜色信息,将背景图像马赛克化获得颜色分布信息,依据色差进行主色替换得到仿造数码迷彩的方法,取得了不同主色数量、色差计算权重、颜色量化数量下的数据。结果表明, 颜色量化为3600种后,提取出4种主色作为仿造数码迷彩主色,根据色差主色替换时色彩权重3 ∶6 ∶1,生成的仿造数码迷彩具有良好的伪装效果,且基于FPGA实现该算法时系统占用资源少,处理800 pixels×480 pixels分辨率的单帧彩色图像所需时间仅为22.21 ms,满足动态场景下生成仿造数码迷彩的实时性需求。该研究为主动伪装技术提供了参考。
为了解决传统仿造数码迷彩生成算法开发平台灵活性不足的问题,提出了一种基于现场可编程门阵列(FPGA)的仿造数码迷彩生成算法。采用直方图统计提取主要颜色信息,将背景图像马赛克化获得颜色分布信息,依据色差进行主色替换得到仿造数码迷彩的方法,取得了不同主色数量、色差计算权重、颜色量化数量下的数据。结果表明, 颜色量化为3600种后,提取出4种主色作为仿造数码迷彩主色,根据色差主色替换时色彩权重3 ∶6 ∶1,生成的仿造数码迷彩具有良好的伪装效果,且基于FPGA实现该算法时系统占用资源少,处理800 pixels×480 pixels分辨率的单帧彩色图像所需时间仅为22.21 ms,满足动态场景下生成仿造数码迷彩的实时性需求。该研究为主动伪装技术提供了参考。
2024, 48(5): 719-725.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.016
摘要:
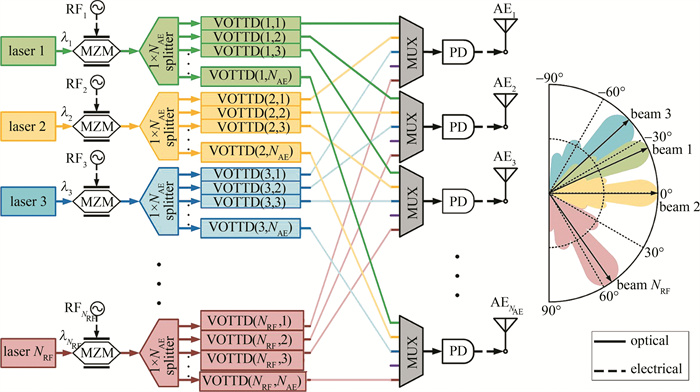
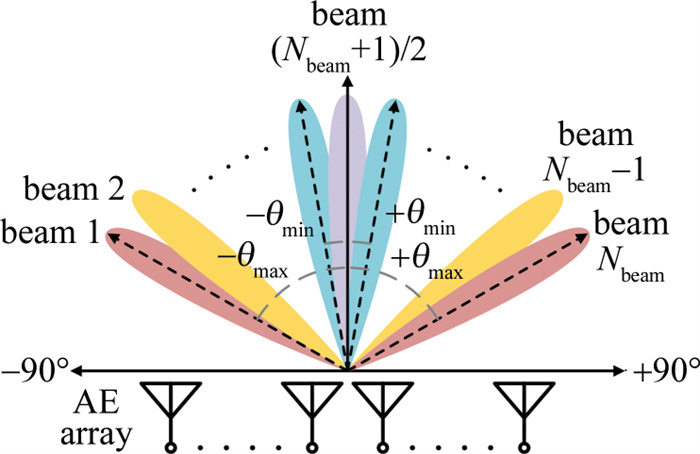
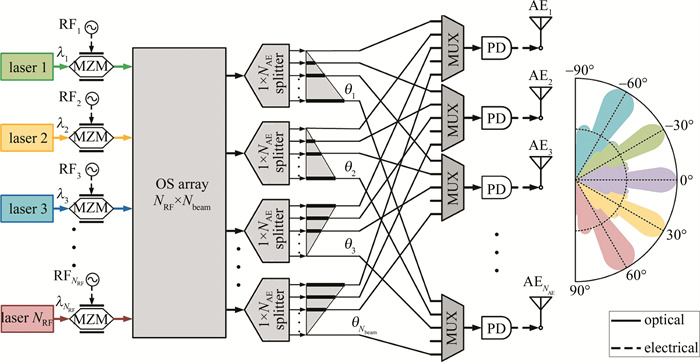
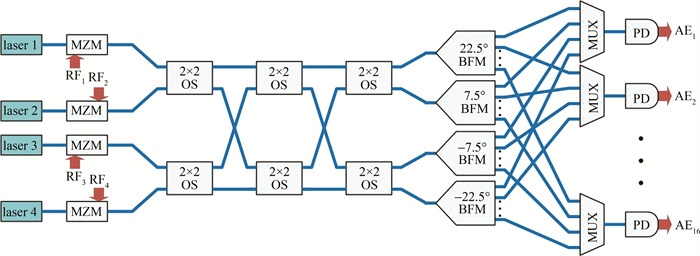
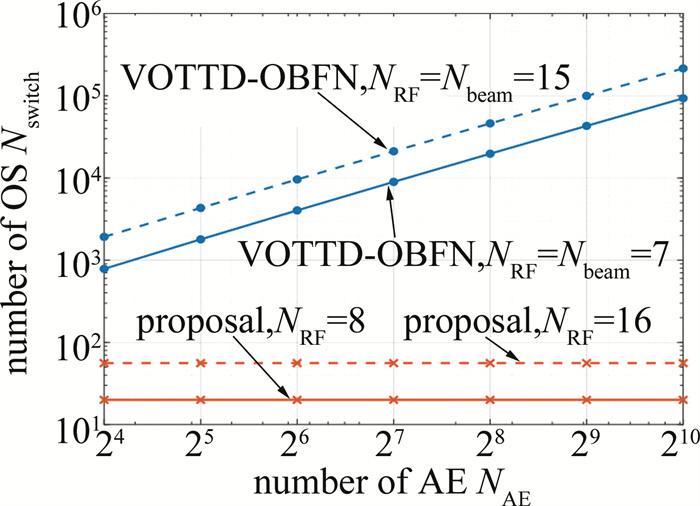
在微波光子多波束形成系统中,为了实现多路射频信号与多个波束间的重构,提出了基于光真延迟和光交换阵列的可重构多波束形成技术方案,其中包括电光转换、光交换阵列、多波束分光阵列、固定光延迟阵列以及光电转换等部分。理论分析了该方案的工作原理和重构机制,建立了仿真模拟实验系统,并验证了基于4端口Benes网络的4路射频信号与固定4波束间重构的性能,得到了多种重构状态下的波束方向图。结果表明,该方案相比基于可变光真延迟的方案减少了约2个数量级的光开关使用数量,降低了系统的成本和控制复杂度,实现了4路射频信号和4波束之间的重构。该研究结果为多波束形成技术的应用提供了一种新的途径。
在微波光子多波束形成系统中,为了实现多路射频信号与多个波束间的重构,提出了基于光真延迟和光交换阵列的可重构多波束形成技术方案,其中包括电光转换、光交换阵列、多波束分光阵列、固定光延迟阵列以及光电转换等部分。理论分析了该方案的工作原理和重构机制,建立了仿真模拟实验系统,并验证了基于4端口Benes网络的4路射频信号与固定4波束间重构的性能,得到了多种重构状态下的波束方向图。结果表明,该方案相比基于可变光真延迟的方案减少了约2个数量级的光开关使用数量,降低了系统的成本和控制复杂度,实现了4路射频信号和4波束之间的重构。该研究结果为多波束形成技术的应用提供了一种新的途径。


2024, 48(5): 752-758.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.021
摘要:
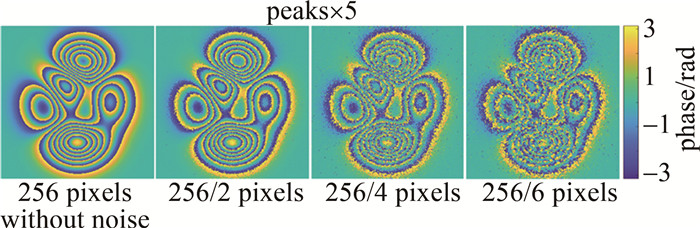
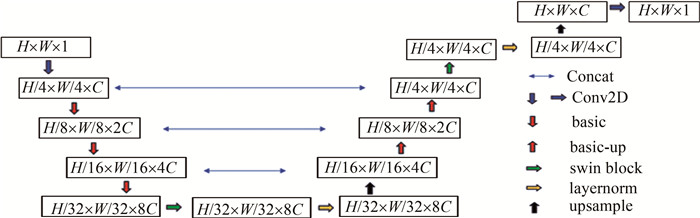
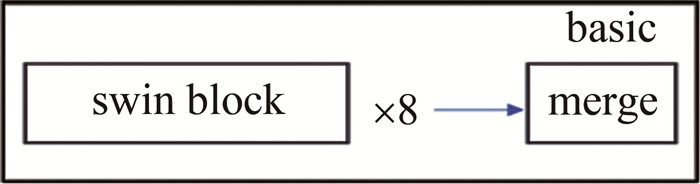
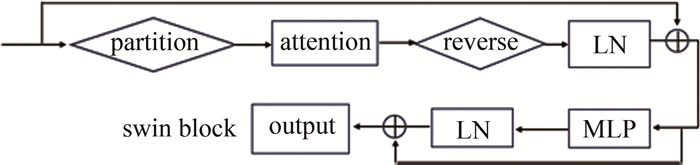
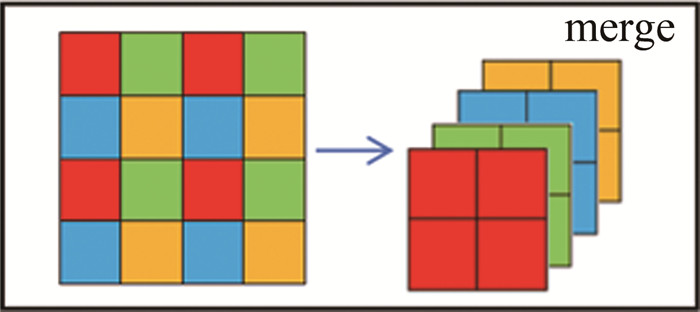
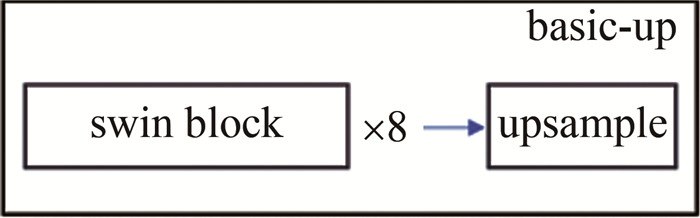
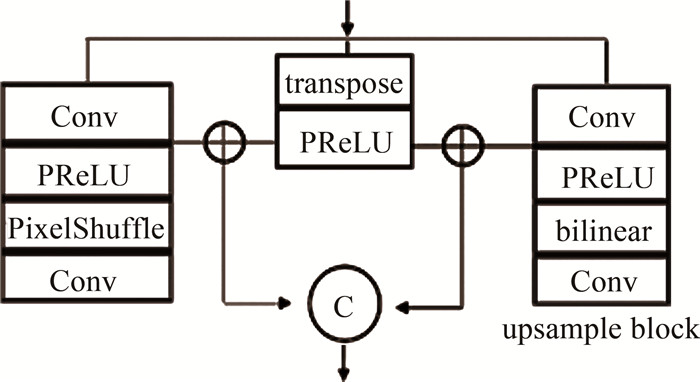
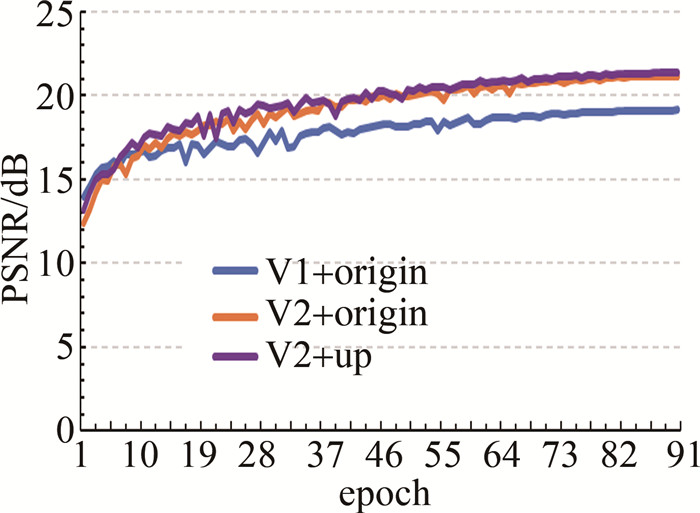
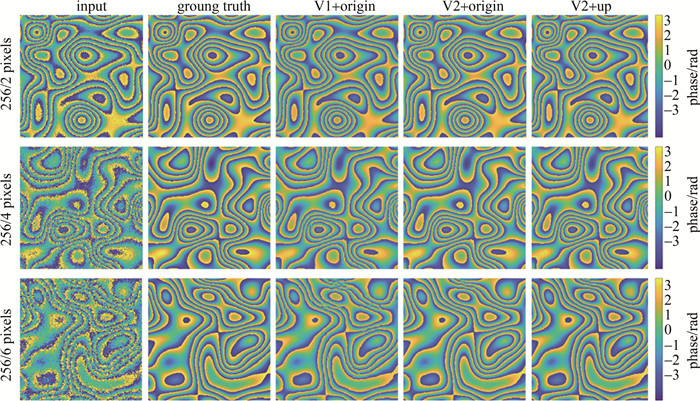
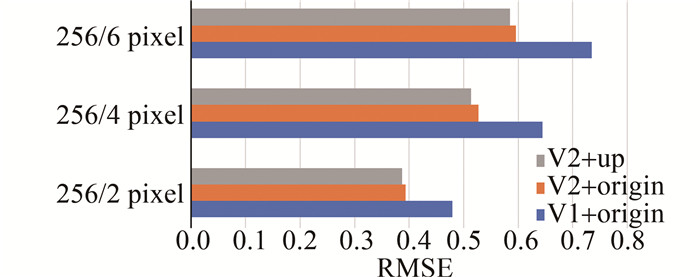
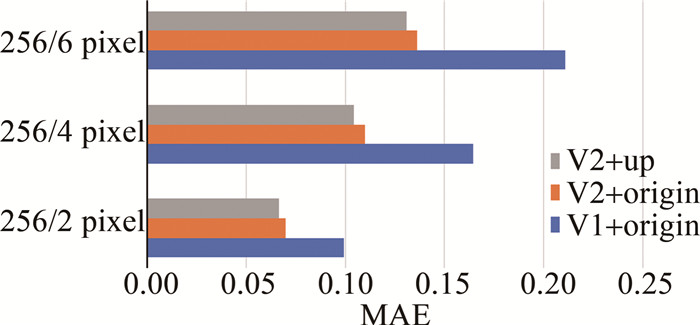
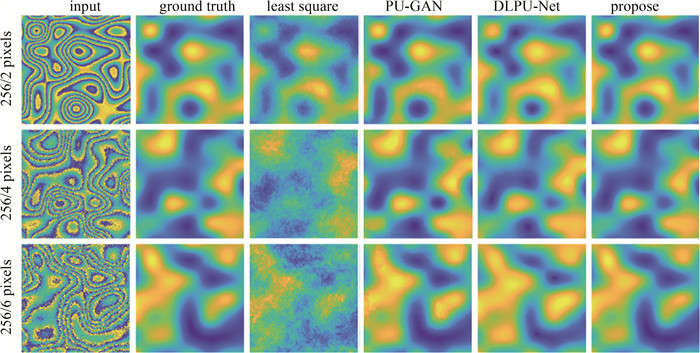
相位解包裹在众多领域应用中都占有重要地位,但总会受到噪声的影响,尤其是散斑噪声。为了去除散斑噪声对包裹相位图的影响,并从中恢复出实际的相位值,采用两步法进行了理论分析和实验论证,从不同程度散斑噪声包裹的相位中恢复出绝对相位。以swin-UNet-denoise网络为基础,将swin block中的归一化层后置,并用余弦相似度计算注意力值,然后将相对位移偏移替换为对数位置偏移,并在上采样模块融合反卷积层以此提升网络的去噪能力;将去噪结果通过最小二乘法解包裹,再通过中值滤波获得绝对相位。结果表明,结构相似度为99.77%,峰值信噪比为39.98,均方根误差为0.4864,平均绝对误差为0.4302。所有网络只在300组仿真数据集上进行训练验证,证明即使在小样本的条件下,该研究也能为更快速、更高效、更准确地实现带有散斑噪声的相位解包裹提供参考。
相位解包裹在众多领域应用中都占有重要地位,但总会受到噪声的影响,尤其是散斑噪声。为了去除散斑噪声对包裹相位图的影响,并从中恢复出实际的相位值,采用两步法进行了理论分析和实验论证,从不同程度散斑噪声包裹的相位中恢复出绝对相位。以swin-UNet-denoise网络为基础,将swin block中的归一化层后置,并用余弦相似度计算注意力值,然后将相对位移偏移替换为对数位置偏移,并在上采样模块融合反卷积层以此提升网络的去噪能力;将去噪结果通过最小二乘法解包裹,再通过中值滤波获得绝对相位。结果表明,结构相似度为99.77%,峰值信噪比为39.98,均方根误差为0.4864,平均绝对误差为0.4302。所有网络只在300组仿真数据集上进行训练验证,证明即使在小样本的条件下,该研究也能为更快速、更高效、更准确地实现带有散斑噪声的相位解包裹提供参考。

2024, 48(5): 765-770.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.023
摘要:
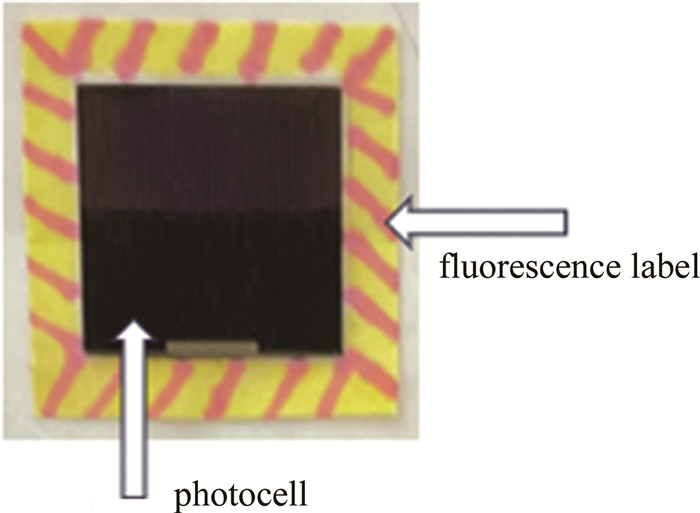
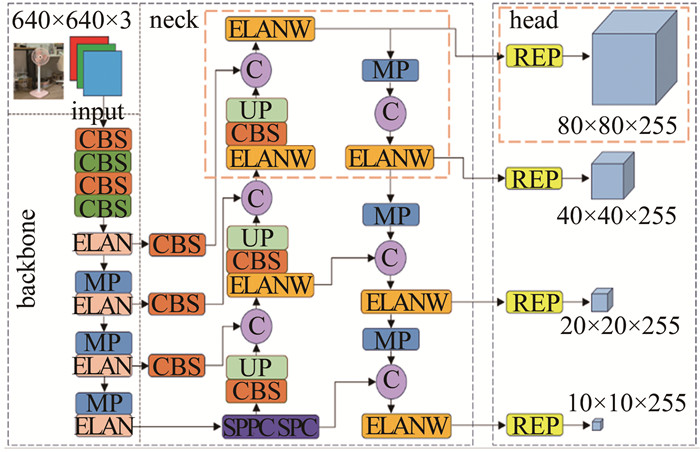
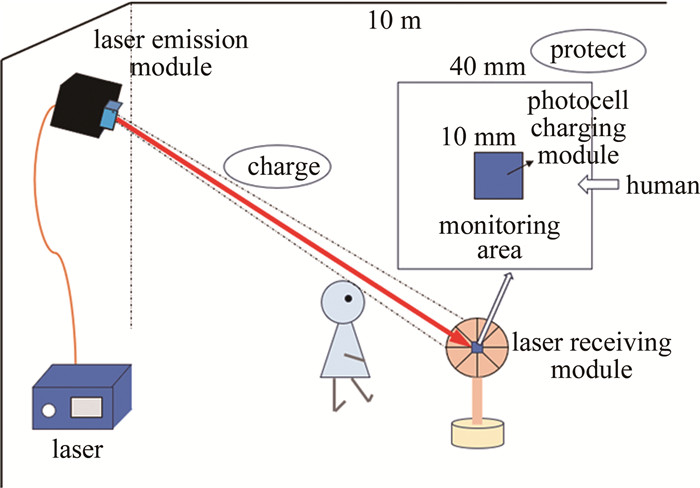
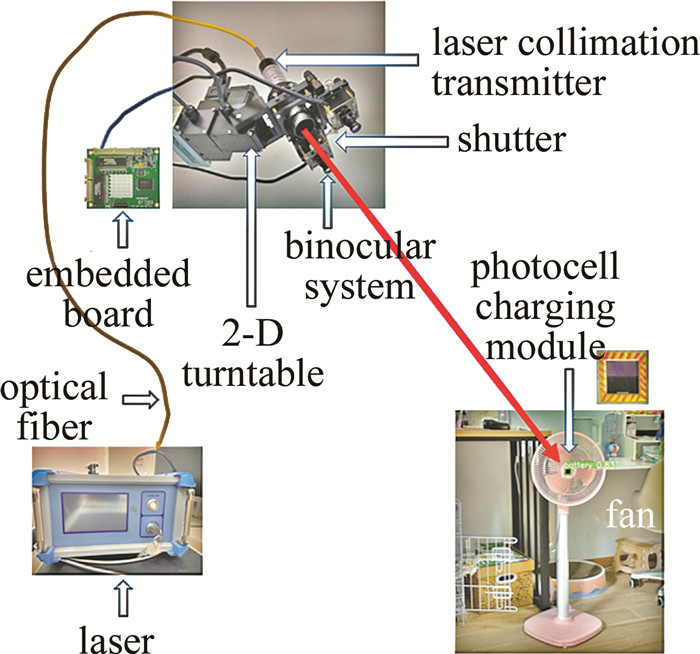
为了提高智能家居远程激光无线充电系统使用的安全性,采用了一种基于深度学习的激光无线充电保护系统。针对贴附于智能家居表面的光伏电池属于小目标,具有不易识别的难点,改进得到了YOLOv7-NH网络模型,设立保护监测区,并融入帧间差分法用于实时监控充电区域;通过创设原理分析-算法框架搭建-环境调试等环节,编写了对充电目标所在区域进行图像监控的保护算法,并搭建了测试系统。结果表明,当激光发射端与充电目标距离在10 m以内,基于该算法搭建的保护系统的响应启动时间均低于1 ms,即当移动异物以低于常规速率1.5 m/s进入大小为40 mm×40 mm的保护监测区时,该保护系统能够在其运动到激光束所在光路前停止激光发射。这一结果对室内激光远程无线充电保护技术的发展是有帮助的。
为了提高智能家居远程激光无线充电系统使用的安全性,采用了一种基于深度学习的激光无线充电保护系统。针对贴附于智能家居表面的光伏电池属于小目标,具有不易识别的难点,改进得到了YOLOv7-NH网络模型,设立保护监测区,并融入帧间差分法用于实时监控充电区域;通过创设原理分析-算法框架搭建-环境调试等环节,编写了对充电目标所在区域进行图像监控的保护算法,并搭建了测试系统。结果表明,当激光发射端与充电目标距离在10 m以内,基于该算法搭建的保护系统的响应启动时间均低于1 ms,即当移动异物以低于常规速率1.5 m/s进入大小为40 mm×40 mm的保护监测区时,该保护系统能够在其运动到激光束所在光路前停止激光发射。这一结果对室内激光远程无线充电保护技术的发展是有帮助的。
2024, 48(5): 651-656.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.006
摘要:
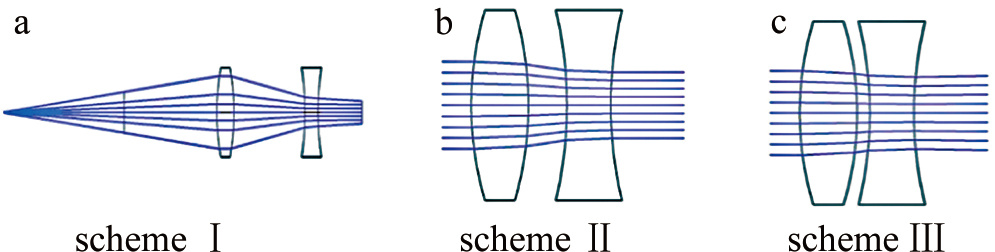
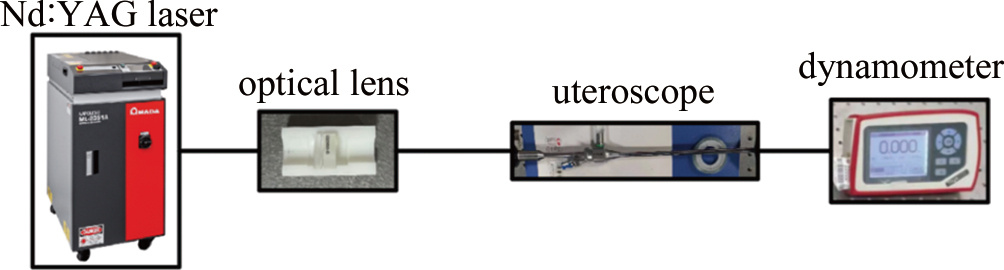
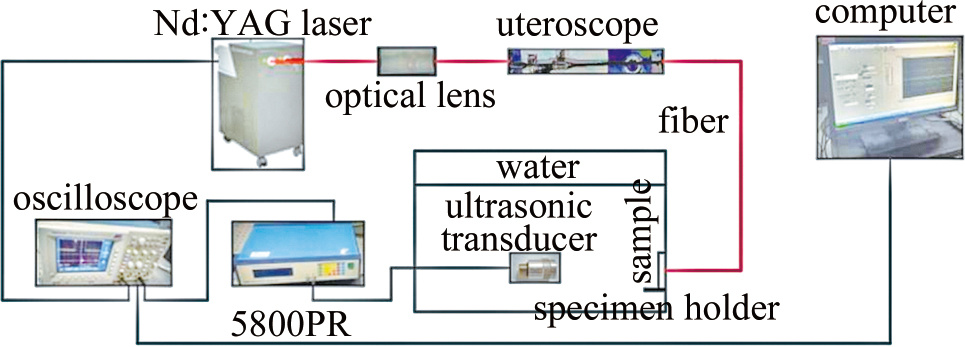
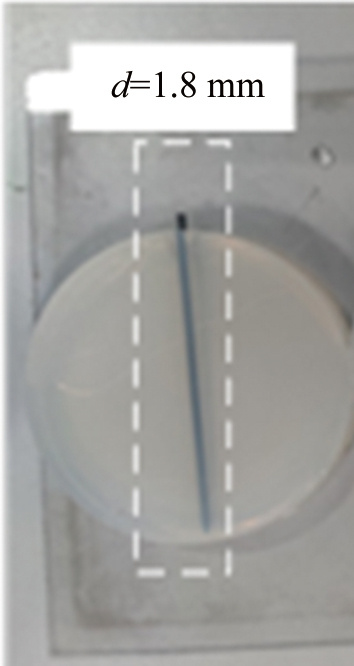
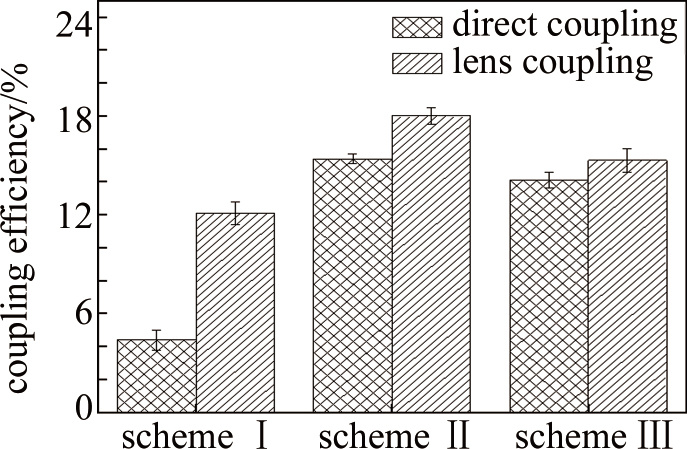
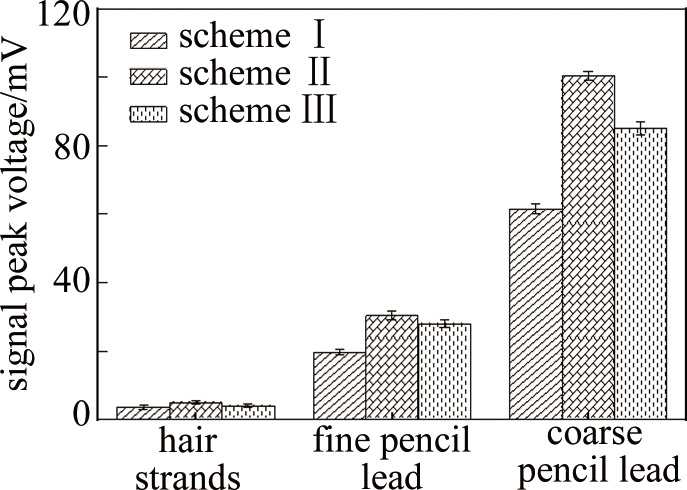
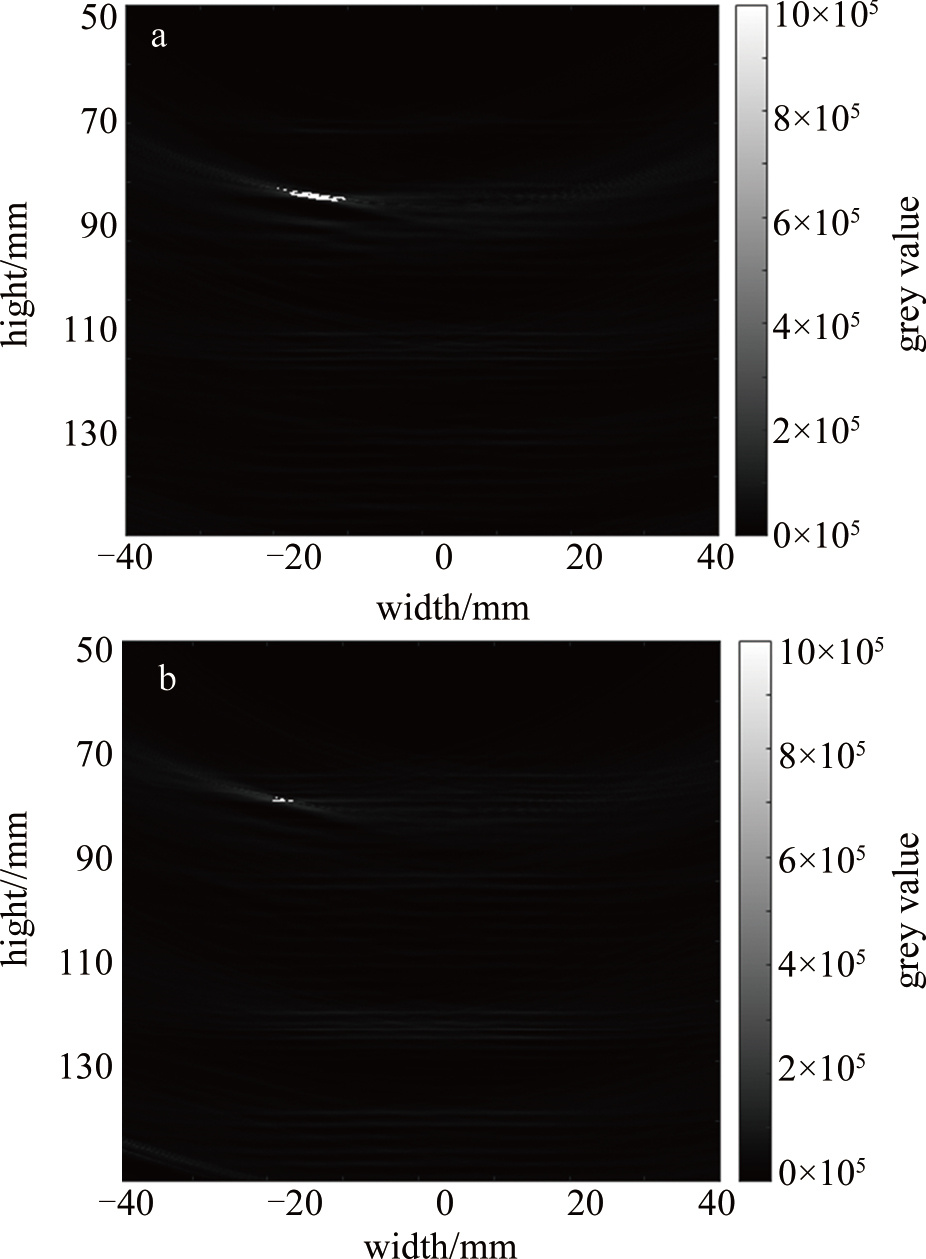
为了提高脉冲激光通过宫腔镜的能量,采用相关软件设计了3种透镜耦合方案来提高耦合效率,进行了理论分析和实验验证。结果表明,耦合效率约提高了14%,脉冲激光通过该耦合模块后能取得较好的光声成像效果。该方法可作为辅助工具应用于临床中子宫内膜等疾病的检测,有望提高光声成像技术在子宫内膜的应用。
为了提高脉冲激光通过宫腔镜的能量,采用相关软件设计了3种透镜耦合方案来提高耦合效率,进行了理论分析和实验验证。结果表明,耦合效率约提高了14%,脉冲激光通过该耦合模块后能取得较好的光声成像效果。该方法可作为辅助工具应用于临床中子宫内膜等疾病的检测,有望提高光声成像技术在子宫内膜的应用。

2024, 48(5): 739-745.
doi: 10.7510/jgjs.issn.1001-3806.2024.05.019
摘要:
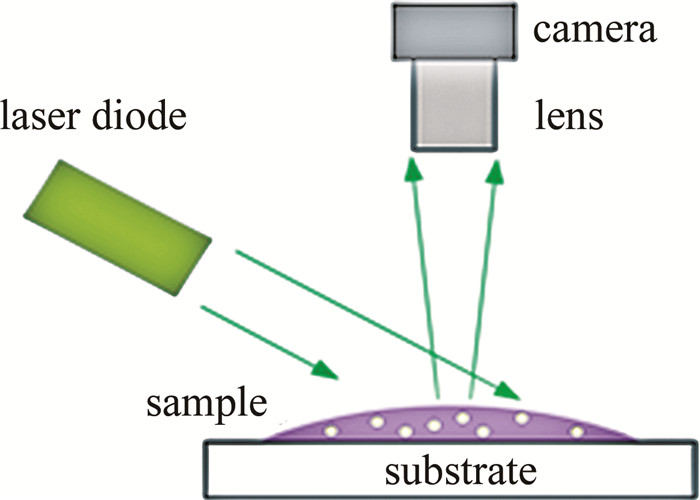
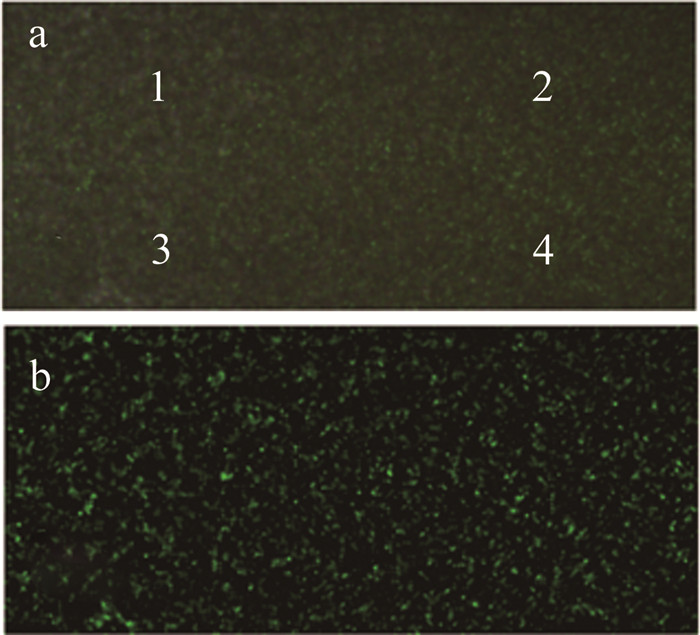
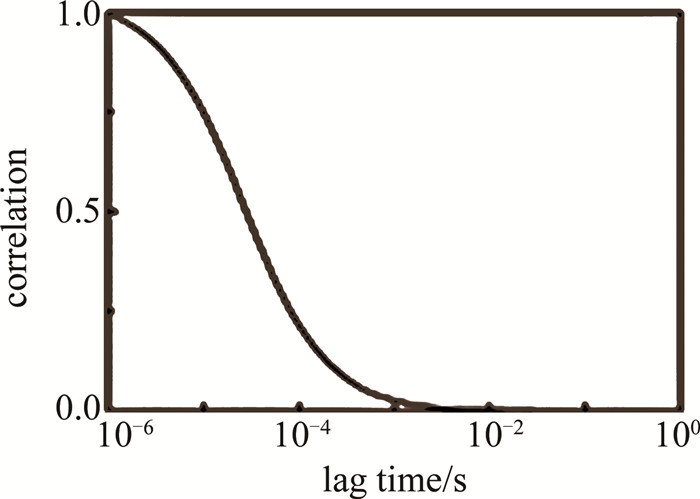
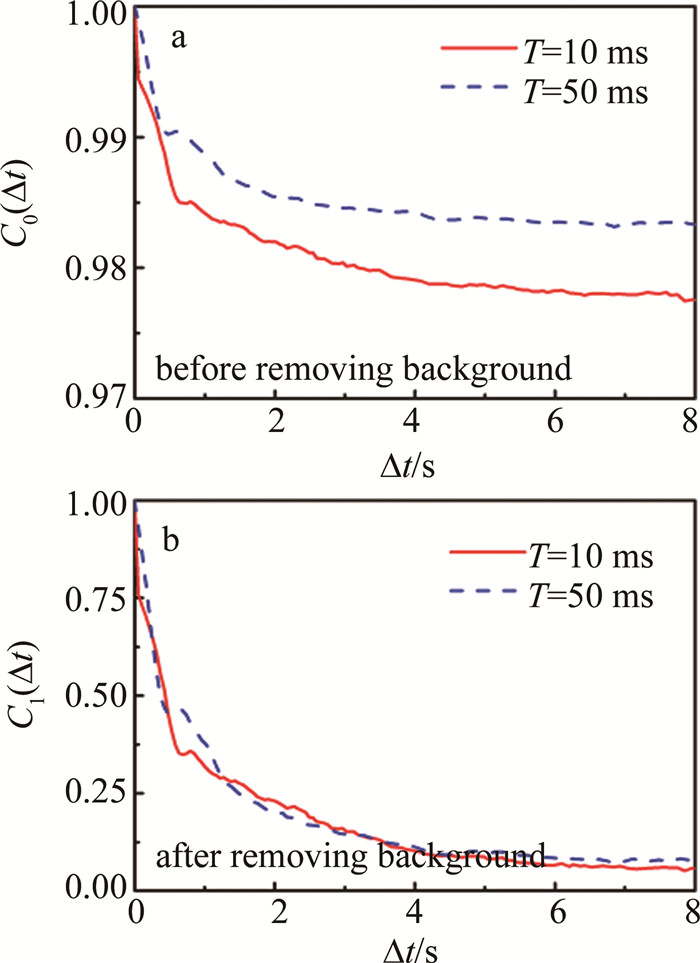
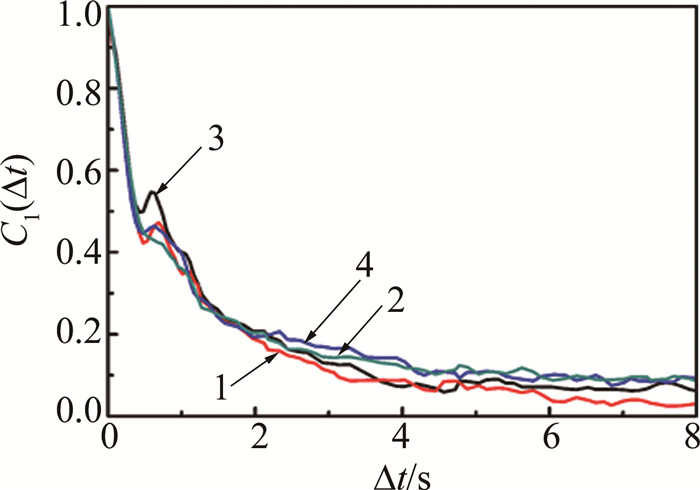
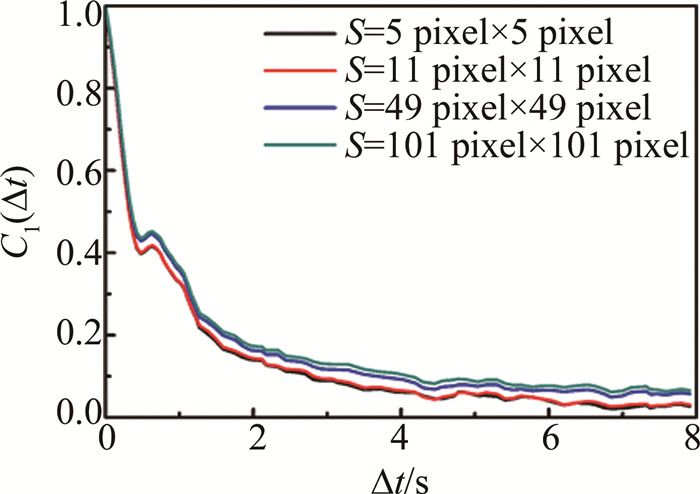
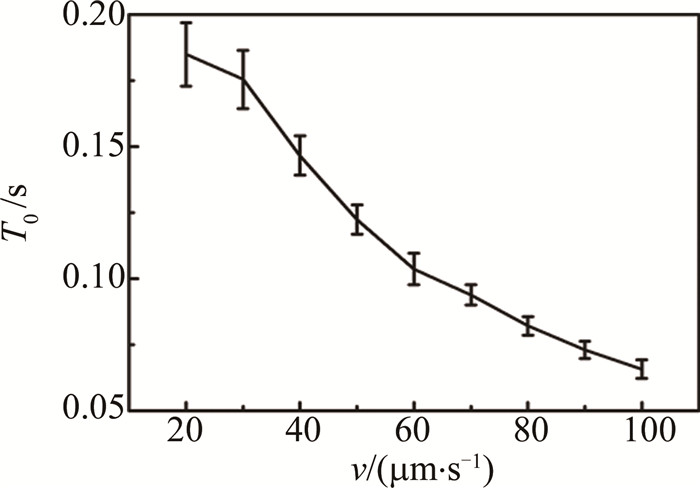
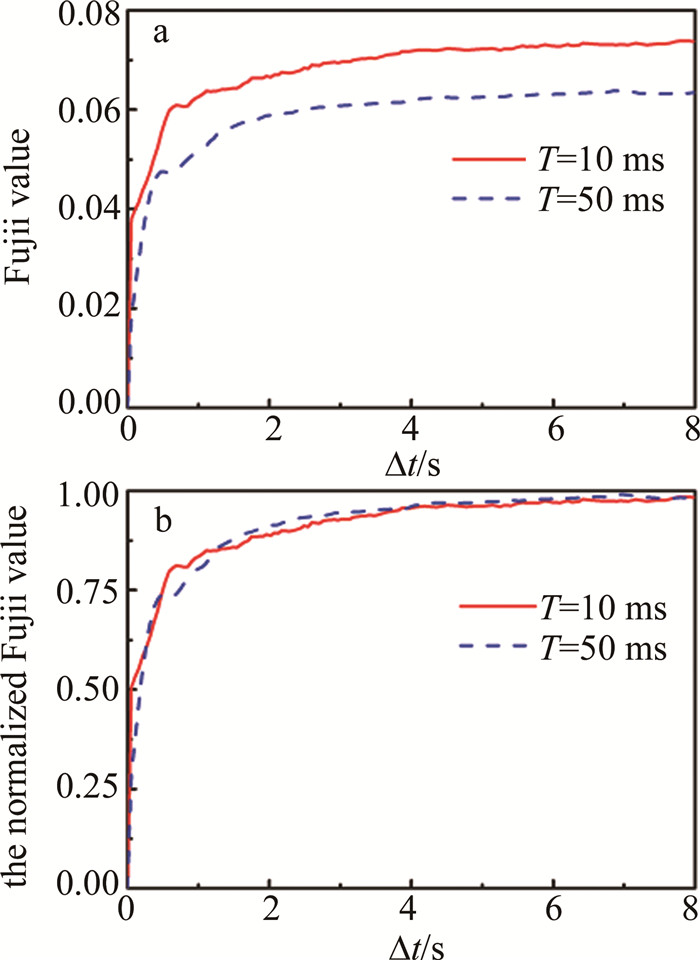
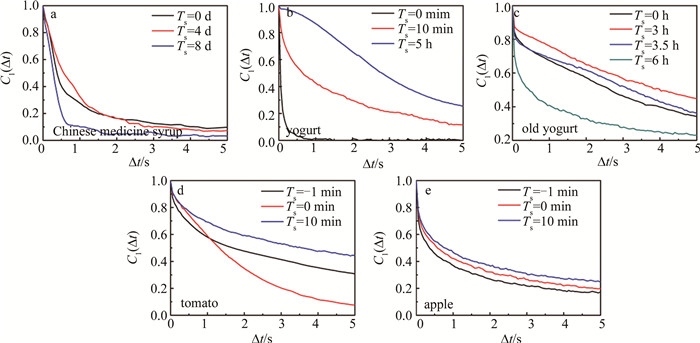
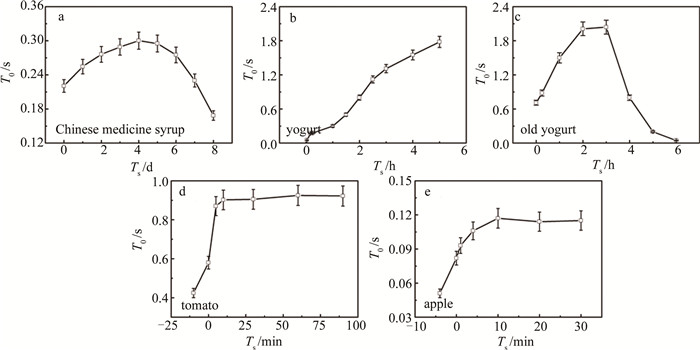
为了解决传统生物散斑测量结果易受实验参数影响的问题,采用模拟动态光散射及荧光相关光谱技术,用相关系数表征生物散斑活性,搭建了实验装置,并对中药糖浆、酸奶、老酸奶、西红柿、苹果等产品进行了实验测试。结果表明,基于相关系数构造的特征时间指标主要由样品中颗粒运动的速率决定,物理意义明确,几乎不受相机曝光时间、散斑区域等实验参数的影响,平均测量偏差小于5%,易在实际应用中使用。由于农业及医药领域中生物样品的多种特性均与颗粒运动速度有关,该方法可为食品、药品行业提供一种新的无损检测工具。
为了解决传统生物散斑测量结果易受实验参数影响的问题,采用模拟动态光散射及荧光相关光谱技术,用相关系数表征生物散斑活性,搭建了实验装置,并对中药糖浆、酸奶、老酸奶、西红柿、苹果等产品进行了实验测试。结果表明,基于相关系数构造的特征时间指标主要由样品中颗粒运动的速率决定,物理意义明确,几乎不受相机曝光时间、散斑区域等实验参数的影响,平均测量偏差小于5%,易在实际应用中使用。由于农业及医药领域中生物样品的多种特性均与颗粒运动速度有关,该方法可为食品、药品行业提供一种新的无损检测工具。