 网站地图
网站地图

-
隔离开关属于变电站重要的一次设备,在电网中扮演着重要角色[1]。隔离开关的主要作用是隔离电压,确保电力设备存在明确可见的断开点[2]。但隔离开关受运行环境影响,导致其极易出现开关合闸不到位现象,使其出现发热或放电问题,缩短电力设备使用寿命,影响电网安全运行[3-4]。为此需要研究隔离开关合闸状态检测方法,及时发现隔离开关的合闸不到位问题,避免影响电网安全运行。例如,SONG等人利用差分算法,提取同一幅图像内触头轮廓,求解轮廓匹配度,依据轮廓匹配度完成隔离开关合闸状态检测,该方法可有效实现隔离开关合闸状态检测[5]。YOU等人利用语义分割算法提取开关臂像素,通过区域生长算法标记开关臂像素,得到开关臂的连通区域,并依据开关臂的连通区域数量,检测隔离开关的合闸状态,该方法可精准检测隔离开关合闸状态[6]。上述方法易受拍摄角度、气候条件等因素影响,降低隔离开关合闸状态检测效果。激光位移传感器具备非接触、高效率与绝对示值等优势[7-9],其位移检测精度较高,且不受外界环境因素影响。为此,本文作者研究了基于激光位移传感器的隔离开关合闸状态非接触自动检测方法,以提升隔离开关合闸状态非接触自动检测精度,确保电网安全运行。
-
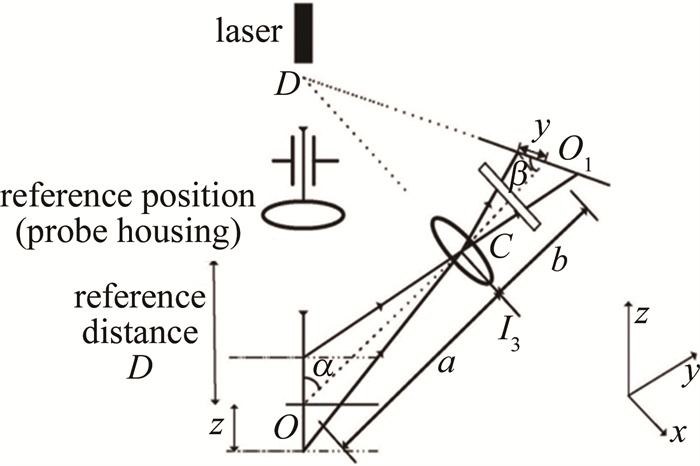
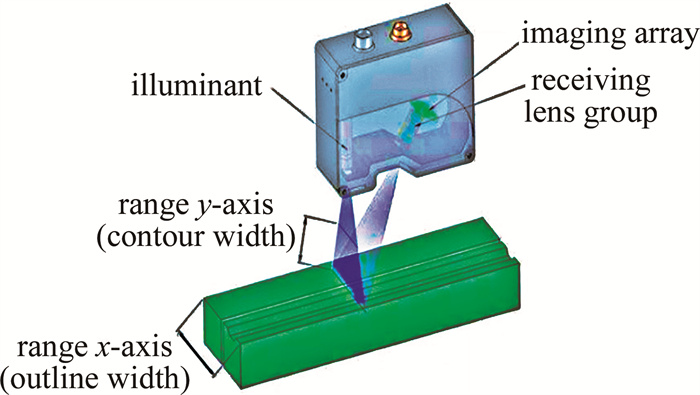
利用激光位移传感器,测量隔离开关轮廓曲线上各采样点的位移,依据位移测量结果构建隔离开关轮廓线,完成隔离开关轮廓曲线采集,得到隔离开关轮廓曲线采样点集。激光位移传感器的测量原理如图 1所示。
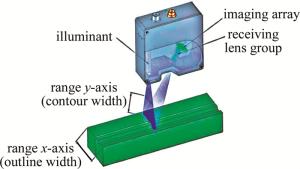
图 1 激光位移传感器的测量原理图
Figure 1. Measurement principle diagram of laser displacement sensor
利用激光位移传感器,采集隔离开关轮廓曲线时,共包含两个运动轴[10],分别是x轴与y轴。令隔离开关处于y轴上,激光位移传感器处于x轴上,并面向隔离开关。激光位移传感器的布局如图 2所示。
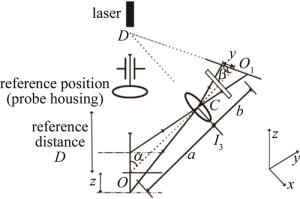
图 2 激光位移传感器的布局图
Figure 2. Layout diagram of laser displacement sensor
令y轴方向上x坐标是0°,同时x轴旋转中心位置的y坐标是0°,那么便可获取隔离开关轮廓曲线上,每个采样点的绝对坐标Pk(xk, yk),公式如下:
$ \left\{\begin{array}{l} x_k=x_{\mathrm{c}} \\ y_k=y_{\mathrm{c}}+m_k \end{array}\right. $
(1) 式中:k=1, 2, …, K,是采样点顺序索引值;K是隔离开关轮廓曲线采样点数量;Pc(xc, yc)是当下激光位移传感器位置;mk是激光传感器测量的第k个采样点位移值。
利用激光位移传感器,采集隔离开关轮廓曲线的具体步骤如下:(a)在采集隔离开关轮廓曲线时,确定激光传感器坐标[11];(b)以不干涉激光传感器为前提,驱动x轴运行至xc=0位置,同时设置点数计数器k=1;(c)移动y轴至|mk| < 0.5 mm位置,尽量确保采样点处于激光传感器测量参考点位置;(d)求解Pk(xk, yk),并令x轴调整一个Pk(xk, yk)的距离,确保下一个采样点处于激光位移传感器测量参考点附近;(e)读取xc,如果xc>360°,那么采样结束,完成隔离开关轮廓曲线采集,并保存隔离开关轮廓曲线采样点集。
利用激光位移传感器,测量隔离开关轮廓曲线上采样点位移mk的具体步骤如下:(a)利用激光发射器发射平行光;(b)经由会聚透镜,聚焦至隔离开关表面,形成漫反射光线,部分光线经由接收透镜成像至电荷耦合器件(charge-coupled device,CCD)光敏面上;(c)在隔离开关按照平行光入射方向移动情况下,对于成像物镜来说,隔离开关表面的散射光斑位置会变化,因此,CCD光敏面上的像点位置也会改变[12];(d)精准测量像点在CCD光敏面上的位移,便可获取隔离开关的位移变化量。计算公式如下:
$ m_k=\frac{L m_k{ }^{\prime} \sin \psi}{L^{\prime} \sin \theta \pm m_k{ }^{\prime} \sin (\psi+\theta)} $
(2) 式中:ψ是发射平行光和接收透镜光轴夹角;θ是CCD光敏面和接收透镜光轴夹角;L、L′分别是接收透镜的物距、像距;mk′是CCD光敏面上采样点位移。
-
为提升激光位移传感器测量隔离开关轮廓曲线上采样点位移的准确性,对其参数进行优化。
令激光位移传感器的分辨率是ρ,计算公式如下:
$ \rho=\frac{\partial \Delta m_k{ }^{\prime}}{\partial \Delta m_k}=\frac{L L^{\prime} \sin \psi \sin \theta}{\left[L \sin \theta+m_k \sin (\psi+\theta)\right]^2} $
(3) 将Ltan ψ=L′tan θ代入式(3)整理后得到:
$ \rho=\frac{L^2 \tan ^3 \psi \sin \psi \cos \theta}{\left[L \tan ^2 \psi \sin \theta+m_k \sin (\psi+\theta)\right]^2} $
(4) 通过式(4)了解到,mk与ρ具有负相关关系,为此,mk最大时,ρ最小,为ρmin。
以ρmin为激光位移传感器测量灵敏度的分析指标,ρmin越大,激光位移传感器测量隔离开关轮廓曲线上采样点位移准确性越高[13]。
激光位移传感器测量隔离开关轮廓曲线上采样点位移时,受其尺寸与实际情况的影响[14],导致ψ需符合下式的条件:
$ 0<\psi<\frac{\pi}{2} $
(5) θ需符合下式的条件:
$ 0<\theta \leqslant \frac{\pi}{2} $
(6) 令激光位移传感器测量隔离开关轮廓曲线上采样点位移时的物方截距L1=L+mk, maxcos ψ,L1需符合的条件为:
$ f \leqslant L_1 \leqslant 2 f $
(7) 式中:f是焦距。通过高斯公式1/L1+1/L1′=1/f可获取像方截距L1′。L1′需符合的条件为L1′≥2f。L1和L1′的比值控制在(4/7, 7/8)之间,可提升激光位移传感器测量隔离开关轮廓曲线上采样点位移的准确性,即4/7 < L1/L1′ < 7/8。
优化激光传感器参数,即以符合上述条件为前提,寻找合理的ψ、θ、L光学参数,令ρmin达到最大值,参数优化模型如下:
$ \begin{gathered} \max \rho_{\min }=F(\psi, \theta, L), \left(0<\psi<\frac{\pi}{2} ; 0<\theta \leqslant \frac{\pi}{2}\right. \\ \left.f \leqslant L_1 \leqslant 2 f ; L_1{ }^{\prime} \geqslant 2 f ; \frac{2}{7}<\frac{L_1}{L_1{ }^{\prime}}<\frac{7}{8}\right) \end{gathered} $
(8) 式中:F(·)是目标函数。利用遗传算法求解式(8),便可获取最大ρmin对应的激光传感器参数优化结果,提升激光位移传感器测量隔离开关轮廓曲线上采样点位移的准确性[15-17]。
-
通过最小二乘法对采集的隔离开关轮廓曲线采样点进行椭圆拟合,并计算隔离开关内导电臂的夹角,依据导电臂的夹角,完成隔离开关合闸状态非接触自动检测。具体步骤如下:(a)隔离开关轮廓曲线采样点排列。依据轮廓曲线采样点的x轴坐标分量[18-19],从小到大排列全部隔离开关轮廓曲线采样点;(b)隔离开关轮廓曲线采样点自动分组。对排列好的隔离开关轮廓曲线采样点展开自动分组,选取合理的采样点作为拟合样本,隔离开关轮廓曲线采样点选择条件为:
$ \left(x_i, y_i, z_i\right)=\left\{\begin{array}{l} \left(x_i, y_i, z_i\right), \left(\left|x_i-x_j\right|<\varepsilon\right) \\ (0, 0, 0), \left(\left|x_i-x_i\right| \geqslant \varepsilon\right) \end{array}\right. $
(9) 式中:第i个隔离开关轮廓曲线采样点Pi的坐标是(xi, yi, zi);ε是距离阈值;当x=xj时,分组平面是Qj;在Pi~Qj距离低于ε情况下,将Pi的x轴分量调整成xj,令Pi处于Qj的上方,否则,令Pi的坐标是0,并剔除该隔离开关轮廓曲线采样点[20];(c)提取椭圆几何中心。利用最小二乘法,对自动分组后的隔离开关轮廓曲线采样点进行椭圆拟合,令Qj(x=xj)上的椭圆方程为:
$ \left\{\begin{array}{l} A_j y^2+B_j y z+C_j z^2+D_j y+E_j z+1=0 \\ x=x_j \end{array}\right. $
(10) 式中:Aj、Bj、Cj、Dj、Ej是椭圆方程的相关参数。通过最小二乘法,对Qj内的隔离开关轮廓曲线采样点依次展开椭圆拟合,公式如下:
$ S=\sum\limits_{i=1}^n\left(A_j y^2+B_j y z+C_j z^2+D_j y+E_j z+1\right)^2 $
(11) 式中:n是自动分组后隔离开关轮廓曲线采样点数量;S是拟合椭圆。计算式(11)内Aj的偏导,同时令Aj=0,方程式最高次是1次,同理,可计算Bj、Cj、Dj、Ej的偏导,联立Aj、Bj、Cj、Dj、Ej的偏导后,可获取一个方程组,求解该方程组,便可获取各平面Qj的椭圆方程系数Aj、Bj、Cj、Dj、Ej值;(d)计算方向向量,将全部Gj划分成两个点集,并计算其中点坐标U1(x1, y1, z1)、U2(x2, y2, z2),隔离开关导电臂方向向量是R (x2-x1, y2-y1, z2-z1);(e)求解隔离开关导电臂与水平方向的夹角后,计算隔离开关前导电臂与后导电臂与水平方向的夹角αa、αb。
设定隔离开关前、后导电臂与水平方向的夹角规定区间是[λa, min, λa, max]、[λb, min, λb, max],当αa∈[λa, min, λa, max],αb∈[λb, min, λb, max]时,说明隔离开关合闸到位,完成隔离开关合闸状态非接触自动检测。
-
以某500 kV变电站的隔离开关为实验对象,该隔离开关的额定参数如表 1所示。
表 1 隔离开关的额定参数
Table 1. Rated parameters of the isolation switch
parameter value rated voltage 500 kV maximum operating voltage 510 kV long run current 3500 A rated peak withstand current 50 kA mechanical stability/time greater than 3000 radio interference voltage less than 500 V 该隔离开关合闸到位前、后导电臂夹角的规定区间均是[0°, 2°]。本文中方法使用的激光位移传感器主要参数如表 2所示。
表 2 激光位移传感器主要参数
Table 2. Main parameters of laser displacement sensor
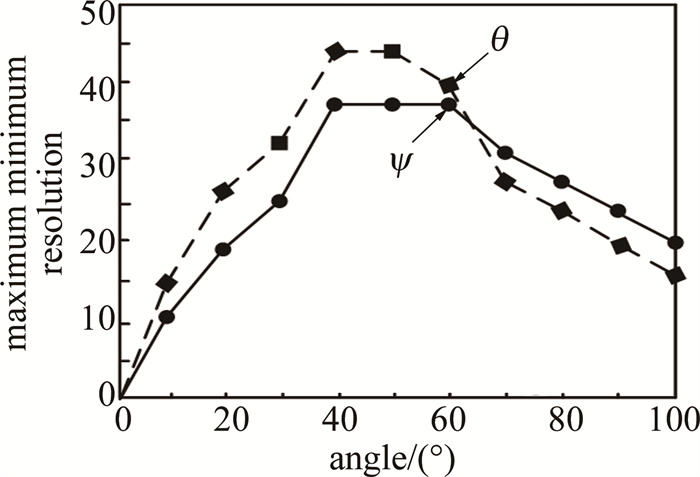
parameter value measuring center distance 120 mm measuring range ±20 mm linear error ±0.2% beam diameter 85 μm repeatability 0.1 μm resolution 0.2 μm 利用本文中的方法优化激光位移传感器的光学参数,以发射平行光和接收透镜光轴的夹角ψ,以及CCD光敏面和接收透镜光轴的夹角θ为例,光学参数优化结果如图 3所示。
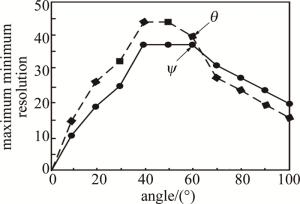
图 3 激光位移传感器光学参数优化结果
Figure 3. Optimization results of optical parameters of laser displacement sensor
由图 3可知,随着ψ的增加,最大化激光位移传感器最小分辨率先上升后下降,当角度为40°~60°时,最大化激光位移传感器最小分辨率达到最大值,说明此时激光位移传感器的位移测量精度最高;随着θ的增加,最大化激光位移传感器最小分辨率也先上升后下降,当角度为40°~50°时,最大化激光位移传感器最小分辨率达到最大值,说明此时激光位移传感器的位移测量精度最高;综合分析可知,ψ的取值范围在40°~60°之间,θ的取值范围在40°~50°之间,此时,激光位移传感器的位移测量精度最高。
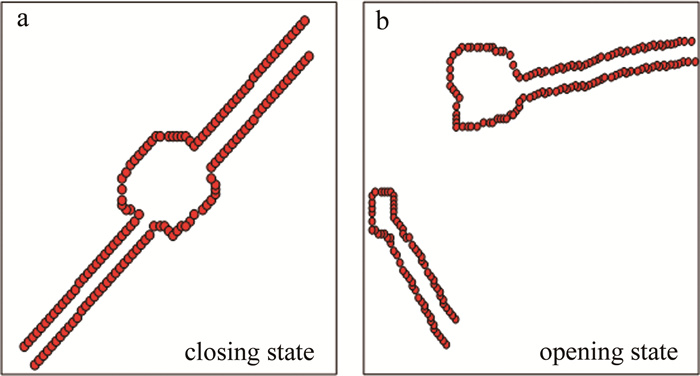
利用本文中的方法采集隔离开关分、合闸状态时的轮廓曲线,采集结果如图 4所示。
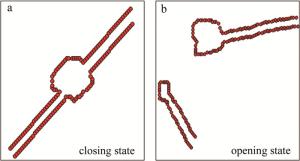
图 4 隔离开关的轮廓曲线采集结果
Figure 4. Acquisition result of contour curve of isolation switch
由图 4a可知,当隔离开关处于合闸状态时,本文中的方法可有效采集其轮廓曲线;由图 4b可知,当隔离开关处于分闸状态时,本文中的方法依旧可有效采集其轮廓曲线。实验证明:隔离开关在不同状态时,本文中的方法均可有效采集其轮廓曲线。
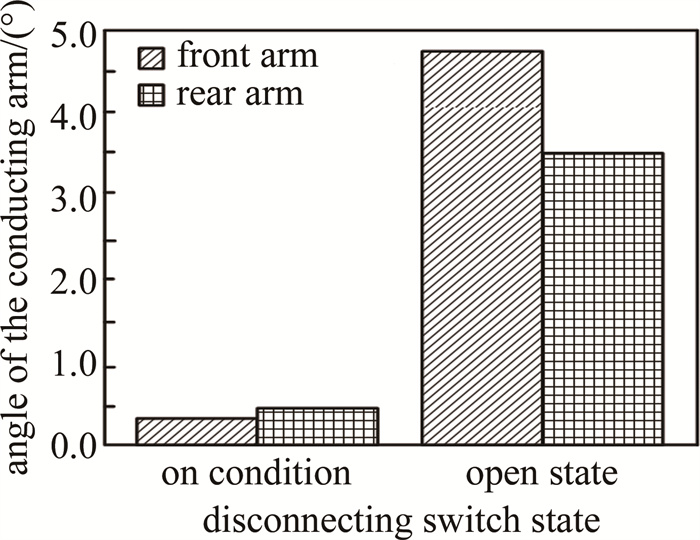
利用本文中的方法计算不同状态下隔离开关,前、后导电臂夹角,并自动检测其合闸状态,隔离开关合闸状态自动检测结果如图 5所示。
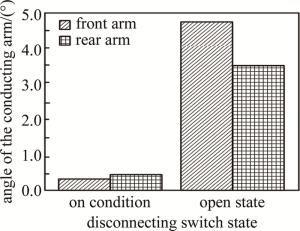
图 5 隔离开关合闸状态自动检测结果
Figure 5. Results of automatic detection of isolation switch closing state
由图 5可知,本文中方法可有效计算隔离开关前、后导电臂夹角。由导电臂计算结果可知,当隔离开关处于合闸状态时,本文中方法计算的前、后导电臂夹角分别在0.4°与0.5°左右,均低于夹角规定区间,说明此时隔离开关合闸到位,与实际情况相符;当隔离开关处于分闸状态时,本文中方法计算的前、后导电臂夹角分别在4.7°与3.5°左右,均高于夹角规定区间,说明此时隔离开关合闸不到位,与实际情况相符。实验证明:本文中的方法可有效自动检测隔离开关合闸状态,且自动检测精度较高。
-
隔离开关合闸是否到位,直接影响电网运行的安全性,为此,研究了基于激光位移传感器的隔离开关合闸状态非接触自动检测方法,通过激光位移传感器优化光学参数,提高分辨率和测量精度;利用激光位移传感器采集隔离开关轮廓曲线,进行拟合并计算导电臂与水平方向夹角;判断夹角是否在规定区间内,从而自动检测隔离开关合闸状态。精准自动检测隔离开关合闸状态,帮助运维人员及时发现隔离开关合闸不到位问题,确保电网安全运行。
在今后的发展中,使用更高精度的激光位移传感器技术以及智能化的数据分析和处理技术,以实现更可靠、灵活和高效的隔离开关合闸状态非接触自动检测。同时,在系统设计和可靠性方面也需要持续不断的改进和优化。
隔离开关合闸状态的非接触自动检测方法
Isolation switch on state of non-contact automatic detection method
-
摘要: 为了提升隔离开关合闸状态自动检测效果,采用了基于激光位移传感器的隔离开关合闸状态非接触自动检测方法, 使激光位移传感器的分辨率达到最大值,优化了激光位移传感器的光学参数,提升了其位移测量精度;通过光学参数优化后的激光位移传感器,采集隔离开关轮廓曲线,得到隔离开关轮廓曲线采样点集;利用最小二乘法拟合隔离开关轮廓曲线采样点的椭圆方程,并计算隔离开关导电臂与水平方向的夹角;当导电臂夹角处于规定夹角区间内,则判定合理开关合闸到位,完成隔离开关合闸状态非接触自动检测。结果表明, 该方法计算的前、后导电臂夹角分别在0.4°与0.5°左右,均低于夹角规定区间。这一结果对实现隔离开关合闸状态非接触自动检测是有帮助的。Abstract: In order to improve the effect of automatic detection of isolation switch's closing state, a non-contact automatic detection method based on laser displacement sensor was adopted. The resolution of the laser displacement sensor was maximized, the optical parameters of the laser displacement sensor was optimized, and its displacement measurement accuracy was improved; Through the laser displacement sensor with optimized optical parameters, the isolation switch contour curve was collected, and the isolation switch contour curve sampling point set was obtained. Using the least square method, the elliptic equation of the sampling point of the isolation switch contour curve was fitted, and the angle between the conductive arm and the horizontal direction was calculated. When the angle of the conductive arm was within the specified interval, the reasonable switch closing was determined to be in place, and the non-contact automatic detection of the isolation switch closing state was completed. The experimental results show that the angle of the front and back conductive arms calculated by this method is about 0.4° and 0.5° respectively, which is lower than the specified interval of the angle. The results indicate that this result is helpful to realize the non-contact automatic detection of the isolation switch.
-
图 1 激光位移传感器的测量原理图
Figure 1. Measurement principle diagram of laser displacement sensor
图 3 激光位移传感器光学参数优化结果
Figure 3. Optimization results of optical parameters of laser displacement sensor
图 5 隔离开关合闸状态自动检测结果
Figure 5. Results of automatic detection of isolation switch closing state
表 1 隔离开关的额定参数
Table 1. Rated parameters of the isolation switch
parameter value rated voltage 500 kV maximum operating voltage 510 kV long run current 3500 A rated peak withstand current 50 kA mechanical stability/time greater than 3000 radio interference voltage less than 500 V  下载: 导出CSV
下载: 导出CSV
表 2 激光位移传感器主要参数
Table 2. Main parameters of laser displacement sensor
parameter value measuring center distance 120 mm measuring range ±20 mm linear error ±0.2% beam diameter 85 μm repeatability 0.1 μm resolution 0.2 μm
下载: 导出CSV
-
[1] 刘衍, 邹阳, 谭舒宁, 等. 基于地面激光雷达的隔离开关合闸状态自动检测方法[J]. 高压电器, 2022, 58(6): 193-198. LIU Y, ZOU Y, TAN Sh N, et al. Automatic detection method of closing state for disconnector based on ground lidar[J]. High Voltage Apparatus, 2022, 58(6): 193-198(in Chinese). [2] 刘博源, 黄昭宇, 江云, 等. 基于新型微组装技术的X波段高隔离开关的设计[J]. 电子技术应用, 2021, 47(8): 20-25. LIU B Y, HUANG Zh Y, JIANG Y, et al. Design of X-band high isolation switch based on new microassembly technology[J]. Application of Electronic Technique, 2021, 47(8): 20-25(in Chinese). [3] 刘子英, 张靖, 付智辉, 等. 基于光纤角度传感器的高压隔离开关角度测量技术研究[J]. 高压电器, 2021, 57(10): 9-17. LIU Z Y, ZHANG J, FU Zh H, et al. Research on angle measurement technology of high voltage disconnector based on optical fiber angle sensor[J]. High Voltage Apparatus, 2021, 57(10): 9-17(in Chinese). [4] 彭诗怡, 刘衍, 周涛涛, 等. 基于操作力矩的高压隔离开关机械缺陷智能诊断[J]. 电工技术学报, 2021, 36(7): 1356-1367. PENG Sh Y, LIU Y, ZHOU T T, et al. Intelligent diagnosis technology of mechanical defects of high voltage disconnector[J]. Transactions of China Electrotechnical Society, 2021, 36(7): 1356-1367(in Chinese). [5] 宋亚凯, 樊晓虹, 何国锋, 等. 基于轮廓匹配度的隔离开关三相分合闸状态同步识别算法研究[J]. 高压电器, 2022, 58(4): 151-157. SONG Y K, FAN X H, HE G F, et al. Synchronous recognition algorithm of three phase opening and closing state of disconnector based on contour matching degree[J]. High Voltage Apparatus, 2022, 58(4): 151-157 (in Chinese). [6] 尤振飞, 赵健, 王小宇, 等. 基于语义分割与连通区域标记的隔离开关状态识别方法[J]. 电力系统自动化, 2021, 45(20): 157-165. YOU Zh F, ZHAO J, WANG X Y, et al. State recognition method for disconnector based on semantic segmentation and connected component labeling[J]. Automation of Electric Power Systems, 2021, 45(20): 157-165 (in Chinese). [7] 刘辉, 冯海盈, 孙钦密, 等. 基于多元回归算法的激光位移传感器非线性误差建模和补偿[J]. 工具技术, 2021, 55(2): 87-90. LIU H, FENG H Y, SUN Q M, et al. Modeling and compensation of nonlinear error of laser displacement sensor based on multiple regression algorithm[J]. Tool Engineering, 2021, 55(2): 87-90 (in Chinese). [8] 王成武, 陆惠宗, 吴俊杰, 等. 激光三角法位移测量多项式拟合及误差修正[J]. 仪器仪表学报, 2021, 42(5): 1-8. WANG Ch W, LU H Z, WU J J, et al. Study of polynomial fitting and error correction method for laser triangulation displacement measurement[J]. Chinese Journal of Scientific Instrument, 2021, 42(5): 1-8 (in Chinese). [9] 蒋晓耕, 孟祥冬, 杨肖, 等. 表面粗糙度对激光位移传感器测量精度的影响和补偿[J]. 工具技术, 2022, 56(12): 156-158. JIANG X G, MENG X D, YANG X, et al. Influence and compensation of surface roughness on measurement accuracy of displacement sensor[J]. Tool Engineering, 2022, 56(12): 156-158 (in Chinese). [10] 赵智龙, 范晓丹, 张玉亮, 等. 基于深度学习的变压器有载分接开关状态监测研究[J]. 变压器, 2022, 59(1): 60-64. ZHAO Zh L, FAN X D, ZHANG Y L, et al. Study on status monitoring of transformer on-load tap-changer based on deep learning[J]. Transformer, 2022, 59(1): 60-64 (in Chinese). [11] 袁培, 王舶仲, 毛文奇, 等. 基于多重生成对抗网络的智能开关设备状态感知与诊断研究[J]. 电力系统保护与控制, 2021, 49(6): 67-75. YUAN P, WANG H Zh, MAO W Q, et al. Research on state perception and diagnosis of intelligent switches based on triple generative adversarial networks[J]. Power System Protection and Control, 2021, 49(6): 67-75 (in Chinese). [12] 赖国书, 高建宇, 罗林欢. 智能配电网开关器件状态在线监测方法[J]. 电力电子技术, 2021, 55(12): 60-64. LAI G Sh, GAO J Y, LUO L H. Switching device status on-line monitoring of intelligent distribution power network[J]. Power Electronics, 2021, 55(12): 60-64 (in Chinese). [13] 高树国, 王丽丽, 田源, 等. 基于振动时频信号灰度共生矩阵的有载分接开关触头状态检测方法研究[J]. 电工电能新技术, 2022, 41(1): 69-77. GAO Sh G, WANG L L, TIAN Y, et al. Research on condition monitoring of contacts in on-load tap changer based on gray level co-occurrence matrix of time-frequency vibration signal[J]. Advanced Technology of Electrical Engineering and Energy, 2022, 41(1): 69-77 (in Chinese). [14] 刘洋, 刘树鑫, 曹云东. 基于模态相似性度量的开关电器状态表征研究[J]. 中国电机工程学报, 2022, 42(2): 844-853. LIU Y, LIU Sh X, CAO Y D. Research on state characterization of switching device based on modal similarity measurement[J]. Proceedings of the CSEE, 2022, 42(2): 844-853 (in Chinese). [15] 张冠英, 高飞, 羡一鸣, 等. 新型直流微网混合断路器拓扑及仿真分析[J]. 计算机仿真, 2021, 38(3): 206-210. ZHANG G Y, GAO F, XIAN Y M, et al. Topology and simulation analysis of a novel DC microgrid hybrid circuit breaker[J]. Computer Simulation, 2021, 38(3): 206-210 (in Chinese). [16] 胡雨润, 王目光, 孙春然, 等. 光纤干涉传感器相位生成载波解调算法研究[J]. 激光技术, 2022, 46(2): 213-219. HU Y R, WANG M G, SUN Ch R, et al. Research on improvement of phase generated carrier demodulation algorithm for fiber optic interferometric sensor[J]. Laser Technology, 2022, 46(2): 213-219 (in Chinese). [17] DADGAR M, NAJAFIAGHDAM E. A high contact force and high-isolation radio-frequency microelectromechanical systems switch for radio-frequency front-end applications[J]. International Journal of Circuit Theory and Applications, 2022, 50(5): 1442-1461. [18] XU Z R, YE Y F, XIA B, et al. Conductive bridging-based memristive RF switches on a silicon substrate[J]. IEEE Transactions on Microwave Theory and Techniques, 2021, 70(1): 24-34. [19] ZHAO M, LI M, TONG X, et al. Private data hiding system using state-switch DWT coefficients quantization on digital signal[J]. International Journal of Pattern Recognition and Artificial Intelligence, 2022, 36(2): 2258002. [20] SAILAJA B V S, NAIK K K. Design of elliptical-shaped reconfigurable patch antenna with shunt capacitive RF-MEMS switch for satellite applications[J]. International Journal of Microwave and Wireless Technologies, 2021, 13(9): 969-978. -

 点击查看大图
点击查看大图
图(5) / 表(2)
计量
- 文章访问数: 2087
- HTML全文浏览量: 360
- PDF下载量: 4
- 被引次数: 0
