
Method research of multiple star sensors ground thermal drift calibration position error detection
-
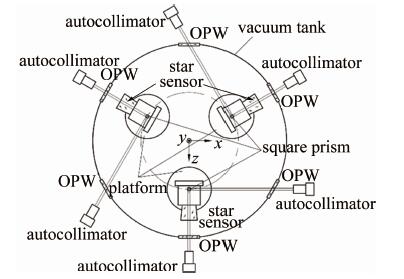
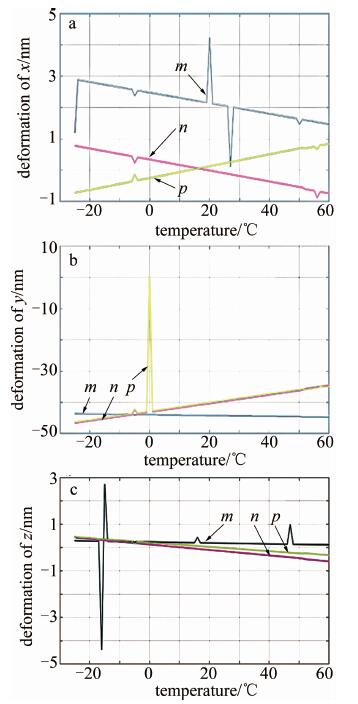
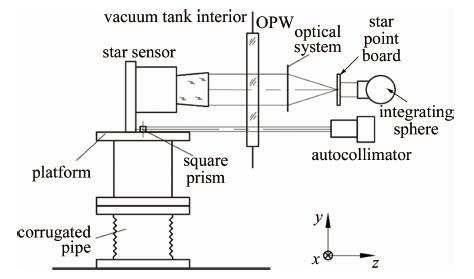
摘要: 为了减少多个星敏感器地面热漂移标定时受到不同安装平台的位置误差影响, 采取一种多星敏感器地面热漂移标定位置误差检测方法,进行了理论分析和实验验证,取得了-25℃~60℃真空状态下系统中基准方棱镜变形的位置偏移量数据,并进行了标定位置误差精度分析。结果表明,多星敏感器位置绕各轴产生的最大偏移量分别为-39.341″/℃, -0.060″/℃, -24.137″/℃,通过建立误差检测模型对位置误差进行计算,将其从姿态测量结果的偏移量中剔除后获得更准确的星敏感器姿态测量四元数,剔除位置误差后的系统精度至少提高了11%。该研究在提高星敏感器热漂移标定精度方面具有很好的应用前景。Abstract: In order to reduce the affect of the deformation offset of different installation platforms on the ground thermal drift calibration of multiple star sensors, a multiple star sensor ground thermal drift calibration position error detection method was proposed. Theoretical analysis and experimental verification were carried out. The position deviation data of the reference square prism deformation in the system under the vacuum of -25℃~60℃ was obtained. And the accuracy analysis of calibration position error was carried out.The results show that, the maximum offsets of the multi-star sensor positions around each axis are -39.341″/℃, -0.060″/℃, and -24.137″/℃, repectively. By establishing the error detection model which was established according to the method of measuring position error, the position error was removed from the offset of the attitude measurement result to obtain a more accurate star sensor attitude measurement quaternion. And the system accuracy after removing the position error was improved by at least 11%, which means it has a good application prospect in improving the accuracy of star sensor thermal drift calibration.
-
0. 引言
激光干涉仪在推动世界科学技术发展中起到无可替代的作用,但也存在一些遗憾:其对被测物体表面发射率要求较高,绝大多数情况下需要在被测物体表面上安装靶镜才能实现测量[1-2]。研究微片激光器的光回馈效应具有重要应用价值,利用这一原理可实现位移、测速、振动、层析成像等非接触式测量应用[3-8]。
激光回馈效应[9]是指激光器的输出光被外部物体反射后,会使得一部分携带有外部物体信息的光回馈至激光器谐振腔内,并与激光器内部光相互作用,调制激光器输出光强的现象。
微片激光器在外腔移频调制下具有极高的光回馈敏感度[10-11],可用于微弱信号检测。XU[12]在全程准共路式微片激光回馈干涉仪中,将移频光回馈效应与相位外差测量技术相结合,测量光和参考光的共路可以有效抑制光回馈中的空程误差等环境问题,并将声光移频量调制在弛豫振荡峰之后,提高了仪器的测量速度。WU[13]在He-Ne回馈位移测量仪中引入了回馈外腔扫描技术,回馈镜被压电陶瓷(piezoelectric transducer, PZT)带动往复运动,使位移测量值在一定范围内来回跳动,可消除直流光强的漂移和环境扰动,对仪器的稳定性有很大提升。
本文作者利用PZT驱动回馈镜进行往复运动调谐激光回馈外腔实验,起到调制激光器输出光强的作用,研究了微片激光器在不同抽运电流驱动及不同PZT调制电压、频率作用下,光回馈条纹幅值和弛豫振荡频率的变化情况,并进行了理论分析与仿真验证。
1. 实验装置
PZT调制激光回馈外腔的实验装置,如图 1所示。
![图 1 PZT调制激光回馈外腔的实验装置]() 图 1 PZT调制激光回馈外腔的实验装置Figure 1. Experimental device for PZT modulated laser feedback external cavity
图 1 PZT调制激光回馈外腔的实验装置Figure 1. Experimental device for PZT modulated laser feedback external cavity微片激光器采用厚度1 mm、直径2 mm的微片晶体Nd∶YVO4作为工作介质,在晶片两端面直接镀膜形成平行平面腔结构,该薄片的厚度即为谐振腔长度L,较短的长度保证了全内腔固体微片激光器输出单纵模激光束。镀膜参数为:抽运光射入面镀双色膜,对808 nm波长增透,透过率大于96%;对1064 nm波长全反,反射率大于99.8%。输出端面所镀双色膜对808 nm波长高反射,反射率大于95%;对1064 nm波长高反射,反射率为98%。
单模激光二极管(laser diode, LD)发射808 nm波长光对Nd∶YVO4微片晶体进行端面抽运,输出1064 nm波长光。方形压电陶瓷片的长宽高为10 mm×10 mm×2 mm,最大驱动电压150 V,对应位移3.3 μm,静电容量760 nF,谐振频率486 kHz。
激光束经消偏振分光棱镜(non-polarization beam splitter, NPBS)被分成两束光,透射光入射到粘黏在PZT表面上的回馈镜(反射率4%),反射光用光电探测器(photodetector, PD)接收并经I/V转化模块来完成输出光强的转换和放大,输出电信号接入示波器进行观察。
2. 实验结果
PZT是一种具有压电性的电介质,当驱动其电压增大时,PZT会伸长一定量,当驱动电压减小时,会缩短回原处。若用对称三角波周期电压驱动PZT,其则会来回伸缩,带动回馈镜调制激光回馈外腔[14]。在20 V~80 V的PZT调制电压作用下,逐渐加大PZT的调制频率进行实验,得到激光器在110 mA~140 mA抽运电流驱动下的光回馈条纹幅值(峰峰值)的变化情况,如图 2所示。
![图 2 不同调制电压作用下的幅频曲线]() 图 2 不同调制电压作用下的幅频曲线Figure 2. Amplitude-frequency curve under different modulation voltage
图 2 不同调制电压作用下的幅频曲线Figure 2. Amplitude-frequency curve under different modulation voltage观察图 2幅频曲线可知,输出幅值有随PZT调制频率的增大总体呈小幅度曲折上升的趋势;在同一PZT调制电压作用下,驱动微片激光器所用的抽运电流值越小,输出幅值越大。在相同PZT调频范围内,输出幅值跟随PZT调频递增的过程中,幅频曲线出现了多个小波折。在PZT调制电压较小(20 V) 时,这种现象尤为明显,但若增大PZT调制电压,曲线上升趋势会变得平缓。
弛豫振荡是固体激光器的基本特性[15],是由谐振腔内的辐射与激活介质存储的能量之间的动态相互作用引起的,它们将持续不断地激发出尖峰,引起输出光强产生波动的现象。利用示波器的快速傅里叶变换功能可观察激光器的光功率谱,如图 3所示。
![图 3 声光移频调制下的光功率谱]() 图 3 声光移频调制下的光功率谱Figure 3. Optical power spectrum under acousto-optic frequency shift modulation
图 3 声光移频调制下的光功率谱Figure 3. Optical power spectrum under acousto-optic frequency shift modulation当实际抽运功率大于出光阈值功率,即抽运水平因子η>1时,激光器中就会出现一个固有弛豫振荡峰频率fr=ωr/(2π),其中ωr=√γcγ(η−1)是激光器的弛豫振荡角频率,γc为腔内光场的衰减速率,γ为上能级反转粒子数的衰减速率,激光光场将以ωr趋于稳态。
左边的线尖峰是PZT移频调制量fPZT,其信噪比大小10lg(Ps/Pn)对应为回馈光灵敏度,Ps是回馈光功率,Pn是无光回馈下的噪声功率,光灵敏度值越大表示对回馈光的放大程度越强,即输出功率的调制幅度越大。
无光回馈效应时噪声为主的信噪比为20 dB,实际应用中需保证回馈光的灵敏度足够强且稳定,即PZT调频量需大于40 dB,可参照图 3,声光移频调制下的回馈光灵敏度约44 dB,也有利于后续的信号处理。
图 4表明了随着PZT移频量的增大,更靠近弛豫振荡峰,回馈光灵敏度得到显著提升,从30 dB(170 kHz)增大至38 dB(180 kHz)、40 dB(190 kHz)。
![图 4 光灵敏度与PZT调频量的变化趋势]() 图 4 光灵敏度与PZT调频量的变化趋势Figure 4. Variation trend of light sensitivity and PZT frequency modulation
图 4 光灵敏度与PZT调频量的变化趋势Figure 4. Variation trend of light sensitivity and PZT frequency modulation线尖峰在PZT小电压低频调制下不易出现,因其所获增益小且动荡。比较图 3(140 mA抽运电流)和图 4(110 mA抽运电流)可知,微片激光器在PZT调制作用下与其经声光移频调制的效果相似,都借助的是弛豫振荡的放大作用,且其频率大小与抽运电流值相关[15]。抽运电流越大,尖峰形成越快,因而尖峰的时间间隔越小,则弛豫振荡频率越大,反之则越小。
提高PZT调制电压,虽能使线尖峰灵敏度增大,但同时可能会出现多个不同频率的单线峰,如图 5所示。可能是PZT伸缩不均所致,或是高频大电压驱动PZT存在上限,即PZT在大电压驱动下,其伸缩量会随调频量的增大而减少[16]。
![图 5 PZT调制电压与线尖峰个数的变化关系]() 图 5 PZT调制电压与线尖峰个数的变化关系Figure 5. Relationship between PZT modulation voltage and the number of line spikes
图 5 PZT调制电压与线尖峰个数的变化关系Figure 5. Relationship between PZT modulation voltage and the number of line spikes改变PZT调制频率,也存在没有对应的线尖峰出现的情况,可能是该移频量恰好处于其附近弛豫振荡尖峰的低谷处,灵敏度低,被噪声淹没。若保持此PZT调频量,将PZT调制电压UPZT由20 V调大至100 V,此线尖峰会再现,如图 6所示。
![图 6 不同PZT调制电压作用下的灵敏度差异]() 图 6 不同PZT调制电压作用下的灵敏度差异Figure 6. Difference in sensitivity under different PZT modulation voltages
图 6 不同PZT调制电压作用下的灵敏度差异Figure 6. Difference in sensitivity under different PZT modulation voltages实验中发现了回馈光灵敏度大小与弛豫振荡峰的相对距离和PZT的调制电压、频率大小有着密切关系。实际应用中,被调制的线尖峰要较为突出,且没有其它频率的线尖峰明显突出,可联动调节这3个参数来实现。
3. 理论分析与仿真
三镜腔激光器外腔中的回馈镜会将光反射回谐振腔内,改变了激光器输出镜的有效反射率,进而对谐振腔内的光场产生调制作用。将输出腔镜M2和外腔回馈镜M3合并为一个等效反射镜M2′,三镜腔模型[17]就可等效为两镜腔模型,如图 7所示。
微片激光器输出角频率为ω的激光束击打在回馈镜上,当用不同调制频率fPZT驱动PZT会带动回馈镜进行往复移动,即回馈镜在初始外腔长的基础上发生小范围的周期性振动变化,此时激光角频率则变为ω+ωPZT,ωPZT=2πfPZT是回馈镜谐振时的角频率。
此时,会有部分回馈光沿原路返回谐振腔内,并与腔内光场发生作用,引起自混合干涉信号的强度呈周期性变化。外腔中由于存在PZT调制回馈镜的作用,光束在经过外腔以及M2′反射后回到M2处的电场[17]为:
E2(t−τe)=E1(t−τe)κ√1−r22×exp(iωPZTt)exp[−i(ω+ωPZT)τe] (1) 式中:E1是激光器的腔内电场;τe=2n0Le/c是激光在外腔的行进时间;n0为外腔介质折射率;c是真空中的光速;Le为激光器外腔腔长;κ为外腔回馈镜的电场反射系数;r2是激光腔镜M2的反射系数。
根据速率方程理论,激光形成振荡是腔内的激光与粒子数反转状态下的激光增益介质的相互作用的动态过程,外腔存在PZT调制的单纵模线偏振微片激光器的速率方程[18]为:
dNdt=γ(N0−N)−BN|E(t)|2 (2) dE(t)dt=[i(ωc−ω)+12(BN−γc)]E(t)+κγcexp(−iωPZT)exp[−i(ω+ωPZT)τe]E(t) (3) 式中:N0是小信号反转粒子数;N是上能级反转粒子数;B是爱因斯坦受激辐射系数;E(t)是腔内光场;ωc为激光谐振腔的共振频率。
结合式(1)~式(3),可得到在PZT调频回馈下的激光器输出光强的相对调制[19]:
ΔI(ωPZT)I=κG(ωPZT)cos(ωPZTt−φ+φ0) (4) 式中:ΔI(ωPZT)为表示激光器输出光强的调制信号;I为稳态输出光强;φ是可反映回馈外腔长信息的外腔回馈相位;φ0为固定的附加相位。可知PZT调制回馈外腔对微片激光器光回馈条纹的影响,实质上是对激光器的类余弦回馈光条纹进行一定程度的放大。G(ωPZT)是一个对回馈光有放大作用的增益项[19]:
G(ωPZT)=2rc(η2γ2+ωPZT2)1/2[η2γ2ωPZT2+(ωr2−ωPZT2)2]1/2 (5) 取Nd∶YVO4激光器的上能级粒子数衰减速率γ=1.11×104/s,腔内光场衰减速率γc=2.75×1010/s,不同抽运电流值可转算为抽运水平因子η,对式(5)进行数值仿真,增益项随PZT调制频率的变化曲线如图 8所示。
![图 8 增益项随PZT调制频率的变化曲线]() 图 8 增益项随PZT调制频率的变化曲线Figure 8. Variation curve of gain term with PZT modulation frequency
图 8 增益项随PZT调制频率的变化曲线Figure 8. Variation curve of gain term with PZT modulation frequency从图 8可知,选择不同抽运电流值,微片激光器的回馈光受弛豫振荡峰影响,所获得的增益各不相同。在同样的PZT低频调制范围内,抽运电流值越小,增益项整体放大作用越强。若PZT调制频率靠近弛豫振荡峰,增益项变大,对回馈光的放大作用增强。当ωPZT=ωr时,增益项最大可达106量级,表明微片激光器经PZT调频回馈后能具有极高的光回馈灵敏度,能用于微弱信号检测。
再对式(4)进行数值仿真,在相同PZT调频量(50 kHz)时,得到不同抽运电流的输出光强的相对调制,如图 9所示。图 9的仿真结果表明,回馈光在相同PZT调制电压作用下,减小抽运电流值,输出幅值会整体增大。
![图 9 不同抽运电流的激光器输出光强的相对调制]() 图 9 不同抽运电流的激光器输出光强的相对调制Figure 9. Relative modulation of laser output intensity with different pump currents
图 9 不同抽运电流的激光器输出光强的相对调制Figure 9. Relative modulation of laser output intensity with different pump currents在同一抽运电流(110 mA),得到不同PZT调频量的输出光强的相对调制,如图 10所示。图 10的仿真结果说明,输出幅值会随PZT调频量的增大而增大。仿真结果很好地印证了图 2中的实验现象。
![图 10 不同PZT调频量的激光器输出光强的相对调制]() 图 10 不同PZT调频量的激光器输出光强的相对调制Figure 10. Relative modulation of laser output intensity with different PZT frequency modulation
图 10 不同PZT调频量的激光器输出光强的相对调制Figure 10. Relative modulation of laser output intensity with different PZT frequency modulation4. 结论
实验中发现,微片激光器的光回馈条纹幅值和灵敏度会同时受驱动抽运电流值以及PZT调制电压、频率的影响。若提高PZT调频,使其更靠近激光器的弛豫振荡峰,对回馈光的放大效果则越明显,输出幅值与PZT调频的变化趋势相同。对外腔存在PZT调频的复合腔等效模型进行理论分析,数值仿真结果与实验现象相符。根据仿真,若在2 MHz的PZT调频下,将140 mA抽运电流减小至略大于出光阈值电流值时,弛豫振荡峰会左偏移减小,其对回馈光的增益将从103增大至105,起主动放大回馈光的效果。用PZT调制回馈外腔的效果与外腔存在声光移频调制的微片激光回馈干涉仪[20]相似,有测量微弱信号的潜在应用价值。
-
![]()
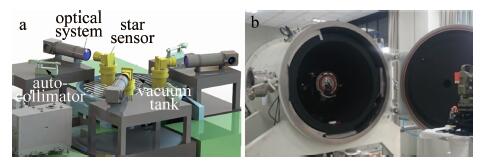
Figure 3. Test device arrangement a—internal three-dimensional layout diagram b—experimental actual device layout
Table 1 Design parameters for the star sensors
parameters index field of view 12°×12° focal length 1121.54mm equipment length ≤1000mm angular accuracy ≤10″ temperature range -25℃~60℃  下载: 导出CSV
下载: 导出CSV
Table 2 Deformation angle results of different temperature
temperature/℃ prism offset around the x axis/(″·℃-1) offset around the y axis/(″·℃-1) Offset around the z axis/(″·℃-1) -25 m -31.2349134 -0.0235792 0.3789641 n -39.3412561 -0.0155460 -24.1372848 p -38. 5584741 0.0609176 -23.4569765 60 m -24.6603975 0.0150 403 0.0159451 n -34.7124605 -0.0492412 -23.5409127 p -35.6208196 0.0143522 -23.7295659
下载: 导出CSV
-
[1] LIANG B, ZHU H L, ZHANG T, et al. Research status and development tendency of star tracker technique[J]. Chinese Optics, 2016, 9(1):16-29(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxyyygxwz201601002
[2] LI X P, SUN Sh Y, ZHENG X J, et al. On-orbit real time installation matrix calibration method for high accuracy star trackers [J]. Infrared and Laser Engineering, 2018, 47(12): 205-211(in Chinese). http://www.zhangqiaokeyan.com/academic-journal-cn_infrared-laser-engineering_thesis/0201270970253.html
[3] CHEN W X, WANG L, ZHENG T, et al. An automatic measurement method for installation error of star sensor [J].China Measurement, 2019, 45(2): 111-115(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgcsjs201902020
[4] GAO Q, REN Zh B, SUN A M, et al. Research on satellite attitude estimation based on star sensor[J].Navigation Positioning and Timing, 2018, 5(1):42-47(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTotal-DWSS201801008.htm
[5] XIONG Y Zh, WU Y P, CHENG H Y. Attitude determination accuracy of multi-head star tracker based on star-image fusion [J].Journal of Chinese Inertial Technology, 2016, 24(5):612-618(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb201605010
[6] SONG L L, ZHANG T, LIANG B, et al. Attitude determination method based on star sensor [J]. Journal of System Simulation, 2010, 22(s1):1-6(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTotal-XTFZ2010S1002.htm
[7] XIE J F. The critical technology of data processing of satellite attitude determination based on star sensor[D]. Wuhan: Wuhan University, 2010: 80-84(in Chinese).
[8] DUAN Y H, GUAN L. High precision attitude measurement and Calibration method of spacecraft based on precision star sensor [J]. Computer Measurement and Control, 2019, 27(11):1-5(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjzdclykz201911001
[9] LONG L, LI Z F. 3-D position measurement algorithm based on laser displacement sensors[J].Laser Technology, 2017, 41(4):531-536(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jgjs201704015
[10] JIANG X D, YU J Y, ZHU L K. Research of combined navigation technology based on position sensitive detectors[J] Laser Technology, 2019, 43(3):335-340(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTotal-JGJS201903009.htm
[11] JIN H, ZHAI Zh Y, DU W F, et al. Experimental analysis of star sensor thermostability [J]. Chinese Journal of Lasers, 2020, 47(2):0204001(in Chinese).
[12] XU Y X, CHEN Q. Analysis and compensation of the star sensor's HFE in the satellite attitude determination [J].Pattern Recognition and Simulation, 2016, 35(10):109-113(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hljzdhjsyyy201610026
[13] WANG H L, HE Y Y, LU J H, et al. Ground calibration method of installation error for star sensor based on three positions method[J]. Infrared and Laser Engineering, 2016, 45(11): 327-332(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hwyjggc201611052
[14] LIAN Y Y, ZHANG Ch, ZHAN Y H, et al. Star apparent position calculation and updating method of attitude determination [J]. Science of Surveying and Mapping, 2015, 40(12): 134-139(in Chinese). http://www.en.cnki.com.cn/Article_en/CJFDTotal-CHKD201512031.htm
[15] WANG X, CAI Sh J, WU L H, et al. Research on calibration technology of star sensor installation error angle[J]. Navigation Position-ing and Timing, 2019, 6(3): 125-130(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dhdwyss201903017
[16] YE T, YANG F. Autonomous calibration of star sensors based on nonlinear optimization algorithm[J]. Optics and Precision Engineering, 2017, 25(9): 2483-2489(in Chinese). DOI: 10.3788/OPE.20172509.2483
[17] ZHANG X, WANG H L, LU J H, et al. Calibration method of optical errors for star sensor based onparticle swarm optimization algorithm[J].Infrared and Laser Engineering, 2017, 46(10): 172-179(in Chinese). http://www.zhangqiaokeyan.com/academic-journal-cn_infrared-laser-engineering_thesis/0201236114677.html
-
期刊类型引用(14)
1. 牛昊,王永丽,姜增璇,李川川,魏志鹏,宋国峰. 基于集成氮化硅超表面VCSEL的涡旋光输出. 发光学报. 2025(02): 326-333 .  百度学术
百度学术
2. 张莉,孙俊. 基于几何相位的高透射型太赫兹超表面设计. 现代电子技术. 2024(03): 7-11 . 百度学术
3. 张莉,孙俊. 基于几何相位的超表面产生宽带太赫兹涡旋波束的设计. 激光杂志. 2024(06): 44-48 . 百度学术
4. 梁庆宣,尹浩宇,李赵辉,段玉冰,王昕,李涤尘. 超表面异质结构的熔融沉积复合成形工艺及其电磁伪装性能研究. 机械工程学报. 2022(03): 276-283 . 百度学术
5. 罗文峰,李新慧,吕淑媛,贾洁. 双波长偏振控制超表面透镜的设计. 西北工业大学学报. 2022(01): 215-221 . 百度学术
6. 罗蒙. 一种产生涡旋光束的勾型阵列超表面结构设计. 激光与光电子学进展. 2021(01): 152-157 . 百度学术
7. 刘嘉伟,聂仲泉. 紧聚焦的角向偏振艾里光束产生超分辨光针. 激光技术. 2021(03): 390-395 . 本站查看
8. 黄晗,黄志高,曾永西. 基于锥形天线阵产生太赫兹伪贝塞尔波束. 三明学院学报. 2020(06): 56-62 . 百度学术
9. 茅晨曦,臧小飞,朱亦鸣. 太赫兹近场涡旋光束的干涉. 中国激光. 2019(01): 346-352 . 百度学术
10. 周璐,赵国忠,李晓楠. 基于双开口谐振环超表面的宽带太赫兹涡旋光束产生. 物理学报. 2019(10): 297-304 . 百度学术
11. 马宇,张浩,刘婷,章海锋. 一种“风车”形单元平面反射阵列天线的设计. 南京师大学报(自然科学版). 2019(02): 81-86 . 百度学术
12. 章海锋. 3维函数光子晶体的特性研究. 激光技术. 2018(03): 318-324 . 本站查看
13. 杨靖,章海锋,张浩,刘佳轩. 基于等离子体超材料的超宽带吸波体设计. 激光与光电子学进展. 2018(09): 346-354 . 百度学术
14. 李文煜,章海锋,刘婷,马宇. 一种波束扫描固态等离子体超表面的设计. 激光技术. 2018(06): 822-826 . 本站查看
其他类型引用(3)










计量
- 文章访问数: 4
- HTML全文浏览量: 1
- PDF下载量: 10
- 被引次数: 17