 网站地图
网站地图

-
风力发电机组净空距离为机组叶片的叶尖与叶尖高度处塔筒壁的最近距离。随着风机技术的发展及能效要求的提高,风机叶片越来越长、越来越柔,同时由于风机机位点地理环境、风况复杂以及寒流、台风等复杂气象条件等因素,风机叶片存在扫塔风险。发生扫塔后轻则更换叶片、重则导致整个机组报废,带来巨大的经济财产损失。激光净空雷达是一种实时监测叶尖净空距离的激光雷达(light detection and ranging,LiDAR),当监测到叶片净空值接近规定的最小净空值时,风机主控可立即采取保护性措施,如减速、收桨等。激光净空雷达进行净空监测的关键是叶片信号的提取,在其应用的过程中,叶片信号容易与雾气信号产生混淆,将叶片信号从雾气信号中分离开来显得尤为重要。
风力发电机组叶片信号的提取已经做了许多研究,最常用的方法主要包括3类:一是以激光净空雷达输出的叶片信号的测距点为基础数据,应用聚类统计的方法实现叶片信号的提取[1-4];二是以毫米波净空雷达输出的叶片信号的回波信息为基础数据,应用关联距离向和方位向信息的方法,实现叶片信号的提取[5-8];三是以视频净空监测系统输出的叶尖图像为基础数据,应用边缘计算的方法从图像中将叶片信号提取出来[9-11]。这3类方法在环境适应性方面做出了很多改进,激光净空雷达以其稳定性、实时性、抗干扰能力强逐渐成为用于风力发电机组净空监测的通用传感器,但是其在区分叶片信号与雾气信号方面仍旧需要发展新方法实现叶片信号的有效提取[12-18]。
随着激光雷达技术的发展,激光功率及光束质量的提升、激光脉冲的累加使之具备较强的穿雾能力、抗干扰能力、虚警抑制能力[19-20]。本文作者以江西省赣州市某山区获取的激光净空雷达数据为数据源,在数据预处理的基础上,采用时空约束的方法,实现了叶片信号的准确提取,在一定程度上降低了激光净空雷达在雾气环境下叶片的虚警率,提升了激光净空雷达测距数据的可靠性,为风机主控的净空预警保护系统提供了稳定有效的数据源。
-
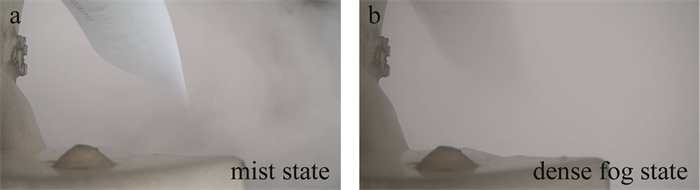
激光净空雷达挂机试验区位于江西省赣州市某山区,此地区全年雾气缭绕,能见度较低,无论白天还是晚上,都有雾气弥漫在山峰中,雾的形态多样,随时间变化较快。图 1展示了从风力发电机组机舱右侧拍摄到的不同雾气状态下叶片划过瞬间的视频画面。从视频画面中可以看出:薄雾状态下天气的能见度较低,此时目视可以模糊地看到叶片的叶尖部分轮廓;浓雾状态下天气的能见度极低,此时目视完全看不到叶片的中部和叶尖部分。

图 1 不同雾气状态下的视频图像
Figure 1. Video images under different fog states
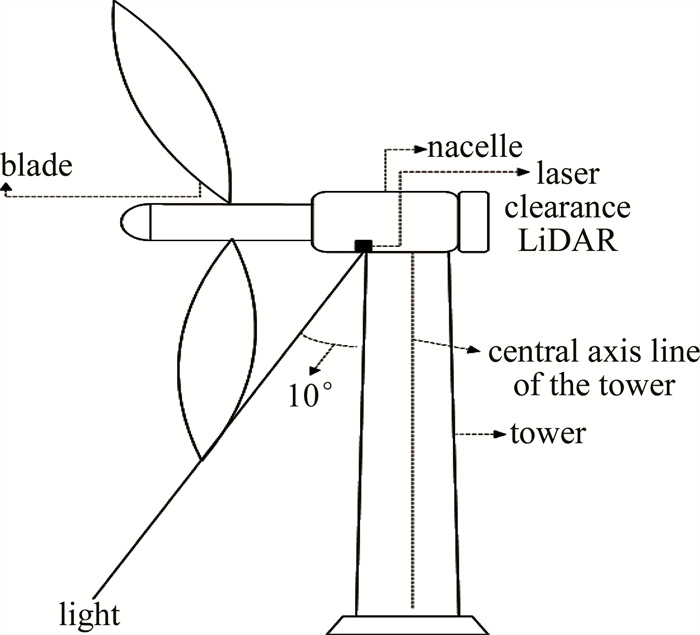
激光净空雷达直接获取的是沿着激光束方向从激光净空雷达的窗口镜到目标地物的距离,目标地物信号包括地面信号、叶片信号、雾气信号等。激光净空雷达采用1550 nm的大能量激光束,其峰值功率、激光束质量比较高,采用(analog-to-digital converter,ADC)采样技术,数据频率为100 Hz,单帧信号数据的采样点数为2000,对应的距离向范围为0 m~150 m,对应的信号强度D的数值范围为0~65535。此次挂机的激光净空雷达安装于风力发电机组的机舱罩内部,其安装位置示意图如图 2所示。激光束方向与塔筒中轴线的夹角为10°,机组的叶片长度为76 m,对应激光净空雷达获取的叶片测距值的最大值为76 m,机组的塔筒高度为100 m,对应激光净空雷达获取的地面测距值在100 m±10 m左右,机组周围环境是平地,没有地面积水。本文中选取了挂机试验期间不同天气、不同时间段内获取的数据进行了叶片信号提取。
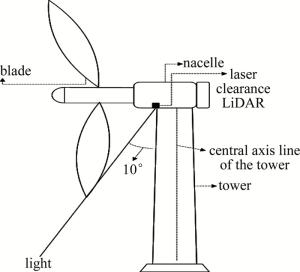
图 2 激光净空雷达安装位置
Figure 2. Installation position of laser clearance LiDAR
-
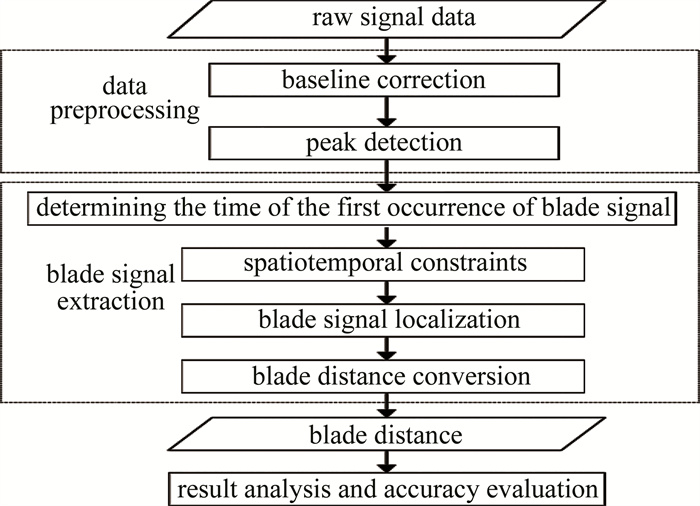
基于激光净空雷达数据的叶片信号提取的基本技术流程如图 3所示。首先对获取的试验区的激光净空雷达原始信号数据进行预处理,一方面对原始信号数据进行基线校正,去除系统噪声,得到纯信号数据,另一方面查找纯信号数据中信号峰位置,根据叶片的测距范围确定叶片信号可能出现的采样点位置及其对应的信号强度;然后进行时空约束分析,以首次寻找到叶片测距范围内信号峰的时刻为初始叶片出现时间,以相邻叶片的周期性为前提,结合叶片信号与非叶片信号的信号强度在空间维度、时间维度的差异,确定叶片信号峰对应的采样点位置,根据采样点位置索引与实际测距值的对应关系,转化为具体的叶片测距值;最后,以同期获取的风力发电机组的(supervisory control and data acquisition,SCADA)数据中的转速信息和叶轮方位信息为参考数据,对试验区的叶片信号提取结果进行结果分析与精度评价,确定激光净空雷达叶片信号提取的精度和测量边界。
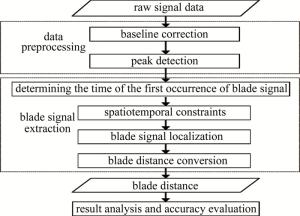
图 3 技术流程
Figure 3. Methodological flowchart adopted in this study
-
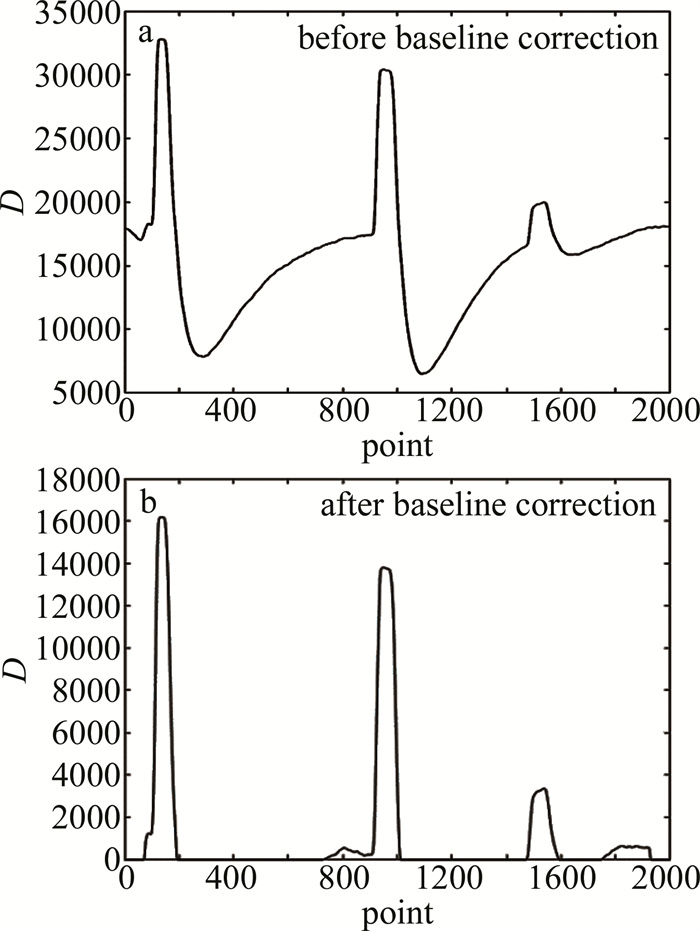
获取试验区的激光净空雷达输出的单帧原始信号数据如图 4所示。从图 4a中可以看出,原始信号的采样点数为2000个,其对应的信号强度D的数值范围在0~65535,不同采样点位置对应的基线水平不一致,信号峰容易与噪声峰产生混淆,此时去除基线噪声就显得尤为重要。采用滑动窗口的方法,计算窗口内原始信号的最小值,将最小值作为基线值,将窗口内的原始信号值都减去基线值,得到去除基线后的信号值,设置滑动窗口的大小为151,得到去除基线后的信号数据如图 4b所示。从图中可以看出,原始信号经过基线校正,所有的信号峰都被凸显出来,有利于下一步叶片信号峰的查找。
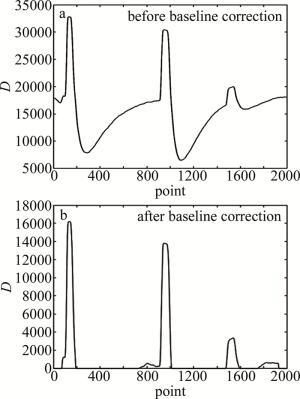
图 4 基线校正前后结果
Figure 4. Results before and after baseline correction
以去除基线后的信号数据为基础,利用1阶差分法,分别计算相邻采样点i-1和i、i和i+1对应的信号值的差值ΔDi、ΔDi+1,当满足以下条件时,其采样点位置i处对应的就是信号峰:当信号峰的峰位置点i在叶片长度对应的采样点范围[663, 1144]内,且点i的信号值Di最大且大于600时,此时峰位置i对应的是疑似叶片信号;当信号峰的峰位置点i在地面对应的采样点范围[1330, 1597]内,且点i的信号值Di最大且大于600时,此时峰位置i对应的是地面信号。
$ \left\{\begin{array}{l} \Delta D_i=D_i-D_{i-1} \\ \Delta D_{i+1}=D_{i+1}-D_i \\ \Delta D_i \geqslant 0 \\ \Delta D_{i+1} \leqslant 0 \\ D_i>600 \end{array}\right. $
(1) -
在对原始信号数据预处理的基础上,以首次寻找到叶片测距范围内信号峰的时刻为初始叶片出现时间T0,提取到下次疑似叶片信号峰的时刻为T1,记录此时疑似叶片信号峰的峰位置L1及其对应的信号值D1、地面信号峰的信号值D3,往T1时刻前推10帧即时间间隔0.1 s,记录其对应的时刻为T2,提取出T2时刻在叶片长度对应的采样点范围[663, 1144]内的最大值为D2,结合叶片信号与非叶片信号的信号强度在空间维度、时间维度的差异,当满足如式(2)所示的条件时,提取出的疑似叶片信号峰位置L1即为真实的叶片信号峰的峰位置,然后根据真实的叶片信号峰的峰位置L1与实际测距值的对应关系,转化为具体的叶片测距值V。具体转换公式如下式所示:
$ \left\{\begin{array}{l} D_1-D_2>300 \\ D_1>2 \times D_3 \\ T_1-T_0>1.75 \\ T_1-T_2=0.1 \\ V=\left(L_1-130\right) \times 0.075 \end{array}\right. $
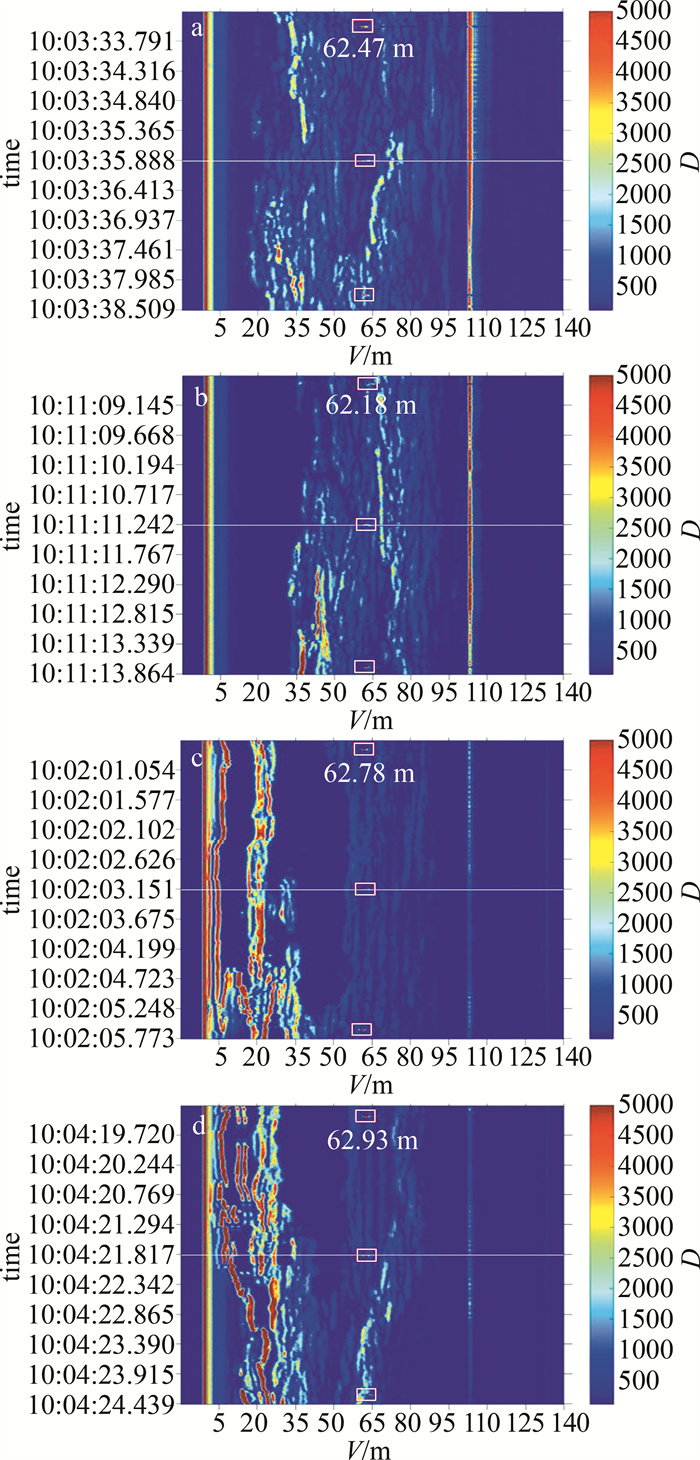
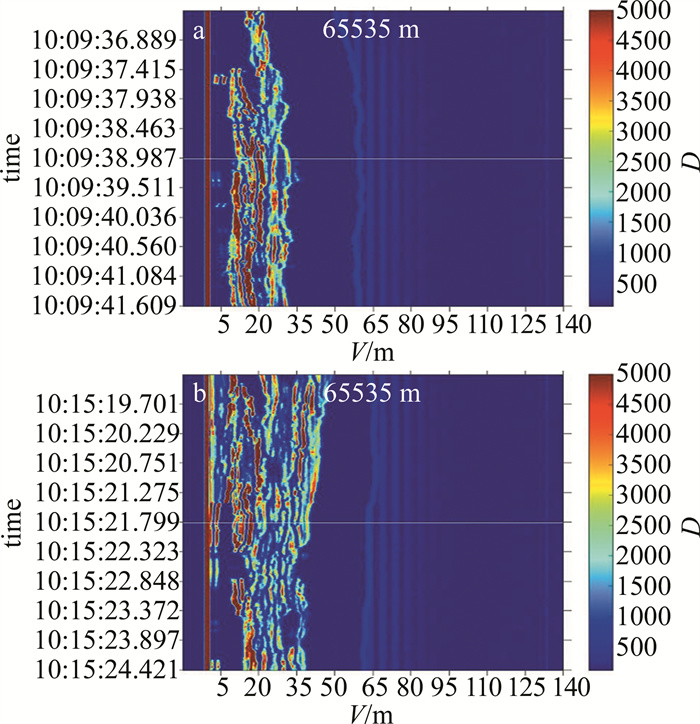
(2) 图 5展示了有雾天气时风机满发状态下激光净空雷达叶片信号提取结果。栅格图显示的是5 s时间范围内的激光净空雷达获取的原始信号分布,其中x轴表示提取到的测距值用V表示,单位为m;y轴表示的是时间分布,时间分布间隔为1 s;图中的矩形框显示的是提取到的叶片信号,中线显示的是5 s时间范围内中间时刻的信号分布,图中列出了中线对应的时刻获取的测距值,右侧的色度条显示了各距离上目标信号强度的强弱,越接近图例顶部颜色,其对应的信号强度越强,叶片信号分布在20 m~76 m的范围内,地面信号分布在90 m~110 m的范围内,雾气信号分布在0 m~110 m的范围内。从图 5a、图 5b中可以看出,5 s的时间范围内,可以完整地提取到3个周期的叶片信号,在90 m~110 m范围内的地面信号清晰可见,在5 m~80 m的范围内,可以零散地看到雾气信号的变化,此时处于薄雾状态,可以准确地提取到叶片信号,对应的叶片测距值分别为62.47 m、62.18 m;从图 5c、图 5d中可以看出,5 s的时间范围内,可以完整地提取到3个周期的叶片信号,在90 m~110 m范围内的地面信号若隐若无,此时的能见度较差,同时在5 m~ 80 m的范围内雾气信号密集分布,信号变化比较强,此时处于浓雾状态,各类团雾复杂飘荡在整个叶片范围20 m~76 m内,可以明显地看到雾气信号值的变化,但是本文中的叶片信号提取方法依然可以有效地从激光净空雷达数据中识别出叶片信号, 对应的叶片测距值分别为62.78 m、62.93 m。
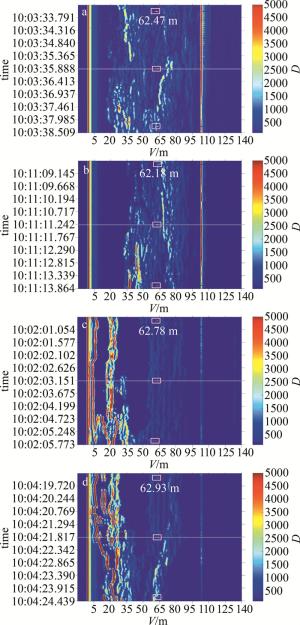
图 5 叶片信号提取结果
Figure 5. Blade signal extraction results
-
以试验区同期获取的风力发电机组的SCADA数据为基础,假设首次叶片信号的初始时刻为T0,首先根据SCADA数据中的转速R确定激光净空雷达探测到下次叶片信号的理论时间T,与真实提取到的下次叶片信号出现时间T1进行对比,筛选出T1和T的时间差在100 ms之内、同时满足此时的SCADA数据中的叶轮方位信息在120°±10°或者240°±10°或者360°± 10°范围内的真实叶片信号,对于不满足这一条件的叶片信号都是叶片虚警,然后计算出叶片信号的虚警率S(S是时间范围t内提取到的叶片虚警个数F与时间范围内理论上的叶片总数N的占比,理论上的叶片总数N是按照转速计算的最大叶片数)。具体公式如下所示:
$ \left\{\begin{array}{l} T=T_0+\frac{20}{R} \\ S=\frac{F}{N} \\ N=3 \times R \times t \end{array}\right. $
(3) 表 1中列出了挂机试验期间不同天气下叶片信号提取结果。挂机试验数据采集时间在2023-04-13—2023-04-16,表中天气(weather)的判读来自于视频监控画面,主要分为3类:无雾(low)、薄雾(middle)、浓雾(high),薄雾天气是指从视频监控画面中可以模糊地看到叶片的叶尖部分轮廓,浓雾天气是指从视频监控画面中完全看不到叶片的叶尖部分,无雾天气时指从视频监控画面中可以清晰地看到叶片的叶尖轮廓,转速R数据和风速v数据来自于风力发电机组的SCADA数据,转速分布范围为7 r/min~11 r/min、风速分布范围为3.84 m/s~10.31 m/s。从表中叶片信号的提取结果来看,在无雾的天气下,叶片虚警率S=0%,在有雾的天气下,无论白天还是晚上,叶片的虚警率都低于2%,完全满足风机净空预警控制的要求。
表 1 叶片信号提取结果
Table 1. Blade signal extraction results
number time weather R/(r·min-1) v/(m·s-1) N S/% 1 2023-04-13T05:00—05:10 high 11.00 10.06 330 1.82 2 2023-04-13T06:10—06:20 high 11.00 9.62 330 0 3 2023-04-13T08:20—08:30 high 10.83 6.02 325 1.91 4 2023-04-13T08:50—09:00 middle 10.20 5.81 306 0 5 2023-04-13T10:00—10:10 high 10.78 6.50 323 1.38 6 2023-04-13T10:10—10:20 high 10.26 6.41 308 0.88 7 2023-04-13T16:10—16:20 low 10.84 6.88 325 0 8 2023-04-13T18:40—18:50 high 9.63 5.53 289 0 9 2023-04-13T 21:10—21:20 low 11.00 9.52 330 0 10 2023-04-13T 21:20—21:30 low 11.00 10.31 330 0 11 2023-04-14T07:10—07:20 high 11.00 7.69 330 1.85 12 2023-04-14T07:20—07:30 middle 11.00 8.15 330 1.20 13 2023-04-14T20:10—20:20 high 11.00 7.02 330 0 14 2023-04-14T20:20—20:30 middle 11.00 6.35 330 0 15 2023-04-14T22:30—22:40 low 11.00 6.37 330 0 16 2023-04-14T22:40—22:50 low 11.00 6.51 330 0 17 2023-04-15T00:10—00:20 low 11.00 6.09 330 0 18 2023-04-15T00:20—00:30 middle 11.00 6.46 330 1.33 19 2023-04-15T01:00—01:10 high 11.00 8.02 330 0 20 2023-04-16T16:20—16:30 high 11.00 6.77 330 1.94 21 2023-04-16T20:10—20:20 middle 8.90 4.18 267 0 22 2023-04-16T21:10—21:20 middle 8.93 4.44 268 0 23 2023-04-16T21:30—21:40 high 9.90 6.17 297 0 24 2023-04-16T22:00—22:10 middle 9.44 5.84 283 0 25 2023-04-16T22:30—22:40 high 7.00 3.84 210 0.01 从挂机试验数据分析结果来看,激光净空雷达数据也表现出其一定的局限性,在雾气非常严重的天气下,激光光束很难穿透雾气,叶片信号被雾气信号完全遮挡,具体表现如图 6所示。图中列出了中线对应时刻输出的无效测距值65535 m。从图中可以看出,5 s的时间范围内,不能提取到任何有效的叶片信号,而且在90 m~110 m范围内的地面信号完全看不见,此时的能见度很差,同时在5 m~50 m的范围内雾气信号强烈分布,完全遮挡住了叶片信号和地面信号,所以此时表现为无效测距值65535 m。
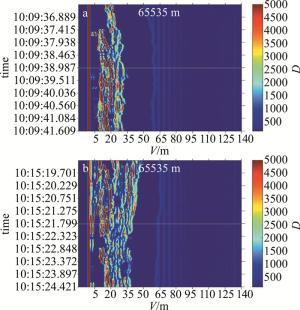
图 6 激光净空雷达数据的局限性
Figure 6. Limitation of laser clearance LiDAR data
-
针对激光净空雷达数据,在数据预处理的基础上,充分利用叶片信号的时间特性和空间特性,建立叶片信号的时空约束规则,应用阈值判定的方法实现了叶片信号距离信息的自动提取,以同步获取的风机主控的SCADA数据为基准,无论白天还是晚上,无雾天气下叶片信号提取的虚警率为0%,有雾天气下提取的虚警率小于2%。
本研究的叶片信号提取方法达到了较好的叶片提取效果,一方面可以满足激光净空雷达进行净空监测的精度要求,另一个方面可以满足工程化应用需求,同时也为多雾地区的风力发电机组的净空监测提供了一定的参考依据。但是本研究只是针对多雾区域的激光净空雷达数据进行的叶片信号提取,对于更加复杂环境下的叶片信号提取还需要进一步研究,同时对于浓雾天气下探测不到的叶片信号,还需要融合可以穿透雾气的传感器数据实现叶片信号的全天时、全天候提取。
基于激光净空雷达数据的叶片信号提取
Blade signal extraction based on laser clearance LiDAR data
-
摘要: 为了降低雾天风力发电机组叶片信号的虚警率,以激光净空雷达获取的原始信号数据为基础数据源,在信号预处理的基础上,采用时空约束的方法,实现了叶片信号的准确提取;并将集成了该叶片信号提取方法的激光净空雷达在常年有雾的地区进行了挂机试验。结果表明,所提出的叶片信号提取方法取得了较好的效果,叶片虚警率低于2%,提升了激光净空雷达测距数据的可靠性和环境适应性。该研究为激光净空雷达用于风机净空监测提供了参考。Abstract: To reduce false alarm rate in foggy conditions for wind turbine blade signals, a method was adopted to accurately extract blades signals by using the raw signal data obtained from laser clearance light detection and ranging(LiDAR)as the primary data source, and incorporating spatiotemporal constraints in signal preprocessing. The laser clearance LiDAR integrated with blade signal extraction method was tested in areas with year-round fog. The experimental results show that blade signal extraction method proposed in this paper has achieved good results, with a false alarm rate of less than 2%, which improves the reliability and environmental adaptability of laser clearance LiDAR ranging data. This study provides a reference for the application of laser clearance LiDAR in wind turbine clearance monitoring.
-
Key words:
- laser technique /
- spatiotemporal constraints /
- false alarm rate /
- blade signal extraction
-
表 1 叶片信号提取结果
Table 1. Blade signal extraction results
number time weather R/(r·min-1) v/(m·s-1) N S/% 1 2023-04-13T05:00—05:10 high 11.00 10.06 330 1.82 2 2023-04-13T06:10—06:20 high 11.00 9.62 330 0 3 2023-04-13T08:20—08:30 high 10.83 6.02 325 1.91 4 2023-04-13T08:50—09:00 middle 10.20 5.81 306 0 5 2023-04-13T10:00—10:10 high 10.78 6.50 323 1.38 6 2023-04-13T10:10—10:20 high 10.26 6.41 308 0.88 7 2023-04-13T16:10—16:20 low 10.84 6.88 325 0 8 2023-04-13T18:40—18:50 high 9.63 5.53 289 0 9 2023-04-13T 21:10—21:20 low 11.00 9.52 330 0 10 2023-04-13T 21:20—21:30 low 11.00 10.31 330 0 11 2023-04-14T07:10—07:20 high 11.00 7.69 330 1.85 12 2023-04-14T07:20—07:30 middle 11.00 8.15 330 1.20 13 2023-04-14T20:10—20:20 high 11.00 7.02 330 0 14 2023-04-14T20:20—20:30 middle 11.00 6.35 330 0 15 2023-04-14T22:30—22:40 low 11.00 6.37 330 0 16 2023-04-14T22:40—22:50 low 11.00 6.51 330 0 17 2023-04-15T00:10—00:20 low 11.00 6.09 330 0 18 2023-04-15T00:20—00:30 middle 11.00 6.46 330 1.33 19 2023-04-15T01:00—01:10 high 11.00 8.02 330 0 20 2023-04-16T16:20—16:30 high 11.00 6.77 330 1.94 21 2023-04-16T20:10—20:20 middle 8.90 4.18 267 0 22 2023-04-16T21:10—21:20 middle 8.93 4.44 268 0 23 2023-04-16T21:30—21:40 high 9.90 6.17 297 0 24 2023-04-16T22:00—22:10 middle 9.44 5.84 283 0 25 2023-04-16T22:30—22:40 high 7.00 3.84 210 0.01  下载: 导出CSV
下载: 导出CSV
-
[1] 周军, 宋维尔. 一种测量风力发电机叶片到塔筒的距离传感装置: CN202010986609.6[P]. 2020-11-24. ZHOU J, SONG W E. Sensor for measuring distance from wind driven generator blade to tower: CN202010986609.6[P]. 2020-11-24(in Chinese). [2] 蒋祥增, 魏煜锋, 石宇峰, 等. 一种基于多激光头的风机叶片净空自动监测方法及系统: CN202010667251.0[P]. 2020-11-03. JIANG X Z, WEI Y F, SHI Y F, et al. Fan blade clearance automa-tic monitoring method and system based on multiple laser heads: CN202010667251.0[P]. 2020-11-03(in Chinese). [3] 周军, 宋维尔. 在恶劣天气下提高多光束距离传感器数据有效率的方法: CN202010986608.1[P]. 2021-01-01. ZHOU J, SONG W E. Method for improving data efficiency of multi-beam distance sensor in severe weather: CN202010986608.1[P]. 2021-01-01(in Chinese). [4] 蒋丹丹, 陈帅, 黄红亮, 等. 一种基于海上净空雷达的叶片检测方法及系统: CN202210815422.9[P]. 2022-10-25. JIANG D D, CHEN Sh, HUANG H L, et al. Blade detection method and system based on offshore clearance radar: CN202210815422.9[P]. 2022-10-25(in Chinese). [5] 陈伟春. 一种叶片净空距离监测系统及叶片净空距离监测方法: CN201911125536.5[P]. 2020-03-31. CHEN W Ch. Blade clearance monitoring system and blade clearance monitoring method: CN201911125536.5[P]. 2020-03-31(in Ch-inese). [6] 李坤, 王寰宇, 吴立丰, 等. 一种基于77GHz毫米波雷达的风力发电机机组叶片净空值的检测方法: CN202010936198. X[P]. 2021-04-13. LI K, WANG H Y, W L F, et al. Detection method for blade clea-rance value of wind driven generator set based on 77GHz millimeter wave radar: CN202010936198. X[P]. 2021-04-13(in Chinese). [7] 兰杰, 郑大周, 王其君, 等. 一种实时预测叶片通过塔筒时扫塔风险的方法: CN202011378635.7[P]. 2021-03-16. LAN J, ZHENG D Z, WANG Q J, et al. Method for predicting tower sweeping risk when blade passes through tower in real time: CN202011378635.7[P]. 2021-03-16(in Chinese). [8] 蔡云龙, 李磐, 代创正, 等. 一种基于毫米波的叶片净空监测系统: CN202111366217.0[P]. 2022-03-18. CAI Y L, LI P, DAI Ch Zh, et al. Blade clearance monitoring system based on millimeter waves: CN202111366217.0[P]. 2022-03-18(in Chinese). [9] 王蓓, 姜磊, 许王建, 等. 叶尖塔筒净空监测方法: CN202010954604.5[P]. 2020-11-10. WANG B, JIANG L, XU W J, et al. Blade tip tower barrel clearance monitoring method: CN202010954604.5[P]. 2020-11-10(in Ch-inese). [10] 李新乐, 杨博宇. 风力发电机组及其塔架净空监控方法和装置: CN201911404716.7[P]. 2021-07-16. LI X L, YANG B Y. Wind generating set and tower clearance monitoring method and device thereof: CN201911404716.7[P]. 2021-07-16(in Chinese). [11] 程庆阳, 蔡云龙, 梁伟林, 等. 一种用于风力发电机组的叶片监测系统: CN202120258869.1[P]. 2021-09-21. CHENG Q Y, CAI Y L, LIANG W L, et al. Blade monitoring system for wind generating set: CN202120258869.1[P]. 2021-09-21(in Chinese). [12] 郭俊凯, 瞿沐淋, 王伟, 等. 气动载荷作用对大型风力机叶片-塔架净空影响分析[J]. 机械工程师, 2021(6): 114-118. GUO J K, QU M L, WANG W, et al. Effect analysis aerodynamic loads on the blade-tower clearance of large wind turbines[J]. Mechanical Engineer, 2021(6): 114-118(in Chinese). [13] ZHANG L, WEI J. Measurement and control method of clearance between wind turbine tower and blade-tip based on millimeter-wave radar sensor[J]. Mechanical Systems and Signal Processing, 2021, 149: 107319. doi: 10.1016/j.ymssp.2020.107319 [14] 杨娟霞, 李强, 赵树椿, 等. 风力发电机组塔架净空优化的变桨控制方法[J]. 新型工业化, 2021, 11(1): 102-106. YANG J X, LI Q, ZHAO Sh Ch, et al. Pitch control method for optimizing tower clearance of wind turbines[J]. The Journal of New Industrialization, 2021, 11(1): 102-106(in Chinese). [15] 冯驹. 双支架叶片净空监测系统相对误差优化[J]. 中国科技纵横, 2021(13): 37-38. FENG J. Relative error optimization of double support blade clea-rance monitoring system[J]. China Science & Technology Overview, 2021(13): 37-38(in Chinese). [16] HELMING P, INTEMANN A, WEBERSINKE K P, et al. Assessing the rotor blade deformation and tower-blade tip clearance of a 3.4 MW wind turbine with terrestrial laser scanning[J]. Wind Energy Science Discussions, 2022, 8(3): 1-21. [17] 杨翀, 王瑞良, 孙勇, 等. 一种风力发电机组主动净空控制策略研究[J]. 机电信息, 2022(17): 1-5. YANG Ch, WANG R L, SUN Y, et al. Research on an active clea-rance control strategy for wind turbine generators[J]. Mechanical and Electrical Information, 2022 (17): 1-5(in Chinese). [18] 王文亮, 张国强, 李璇烨. 风电机组叶尖净空分析与控制[J]. 水力发电, 2022, 48(4): 94-98. WANG W L, ZHANG G Q, LI X Y. Analysis and control of wind turbine blade tip clearance[J]. Water Power, 2022, 48(4): 94-98(in Chinese). [19] 闫德立, 高尚, 李韶华, 等. 基于激光雷达的道路不平度及可行驶区域检测[J]. 激光技术, 2022, 46(5): 624-629. YAN D L, GAO Sh, LI Sh H, et al. Detection of road roughness and drivable area based on LiDAR[J]. Laser Technology, 2022, 46(5): 624-629(in Chinese). [20] 李兵, 杨赟秀, 李潇. APD阵列及其成像激光雷达系统的研究进展[J]. 激光技术, 2023, 47(3): 310-316. LI B, YANG Y X, LI X, et al. Research progress of APD array and its imaging LiDAR system[J]. Laser Technology, 2023, 47(3): 310-316(in Chinese). -

 点击查看大图
点击查看大图
图(6) / 表(1)
计量
- 文章访问数: 3341
- HTML全文浏览量: 1143
- PDF下载量: 13
- 被引次数: 0
