 网站地图
网站地图

-
相干测风激光雷达(light detection and ranging,LiDAR)是一种光电遥测设备,利用激光与大气粒子之间的多普勒效应进行风场测量。具有时空分辨率高、响应速度快、体积小、重量轻、不易受无线电干扰等特点,已广泛应用于民航、气象、环保、风能等民用领域,在舰载机起降、空投空降、火炮弹道校正等场景也得到了越来越多的应用[1-9]。激光在大气传输过程中存在退偏和消光效应,造成气溶胶散射回波与本振光偏振失配,导致系统外差效率、信噪比、最大探测距离和径向风速精度下降[10-14]。为了实现高精度远程风场探测,增加信号抗天气干扰能力,需要开展相干测风激光雷达回波偏振特性研究。
ABARI等人根据大气湍流路径上的光学相干面积建立相干多普勒激光雷达的信噪比模型,对双偏振回波信号进行了数值仿真[15]。LUO针对直探式偏振激光雷达,利用米勒理论建立了系统偏振模型,并对关键光学元件的偏振性质进行了仿真分析[16]。KLIEBISCH等人提出卷积神经网络法,并开展了低信噪比情况下的相干风场探测实验,实验系统单脉冲能量为180 μJ,脉宽为300 ns,重频为20 kHz[17]。BANZHAF等人采用相位编码调制对近程风场进行了相干测量,探测距离为180 m,最大风速为80 m/s[18]。WOLFE等人基于光学单边调制原理对相干多普勒激光雷达进行了优化,将激光脉宽压缩到4 ns,提高了系统距离分辨率[19]。SPULER等人以飞机作为载荷平台装载全光纤激光遥测系统,开展了风速测量,最大探测距离达到12 km[20]。LIANG等人研制了高时空分辨率的相干测风激光雷达,通过耦阶峰值锐化技术实现了3 m的空间分辨率和0.1 s的时间分辨率[21]。这些研究都侧重于寻觅新的数据处理方法提高相干测风激光雷达时空分辨率,对于大气退偏作用后不同回波偏振态对系统径向风速精度影响的研究少有报道,缺乏对复杂湍流情况下,外差效率、信噪比、风速精度与回波偏振特性的关联模型和实验验证。
本文中先简述相干多普勒激光测风雷达系统组成和原理,再从相干探测外差效率出发,仿真分析了不同回波偏振态条件下,径向风速精度与系统信噪比和探测距离的变化规律,并提出偏振补偿的实现途径,最后开展了径向风速精度比对验证实验。此研究为相干测风激光雷达回波接收模块的优化设计提供了理论基础。
-
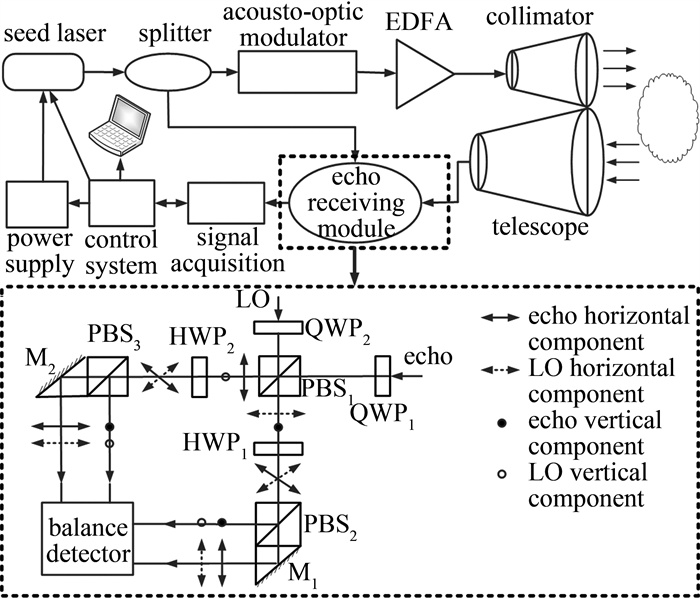
相干多普勒测风激光雷达系统如图 1所示。由种子光、分束器、声光调制器、掺铒光纤放大器(erbium-Doped fiber amplifier, EDFA)、天线、回波接收模块、信息处理机、综合控制机、供电单元等组成。通过对大气气溶胶散射回波与系统本振光拍频后的信号进行数字鉴频,获得激光发射视向方向的径向风矢量,结合扫描机构和反演算法实现目标空域的风场测量。系统主要技术参数如表 1所示。图 1中,LO(local oscillator)为本振光,echo为回波,QWP(quarter-wave-plate) 为λ/4波片,PBS(polarization beam splitter)为偏振分束棱镜,HWP(half-wave-plate)为λ/2波片,M1和M2为反射镜。

图 1 相干测风激光雷达系统图
Figure 1. Diagram of coherent wind LiDAR
表 1 系统主要技术参数
Table 1. Main parameters of system
parameter value wavelength 1.55 μm pulse energy 200 μJ pulse repetition frequency 8 kHz shifted frequency 80 MHz telescope diameter 100 mm 3 dB bandwidth 200 MHz sampling rate 500 MHz 回波接收模块是保证系统探测灵敏度的关键部件,基于空间双偏振分集相干探测原理,将偏振匹配、初始相位差恒定的回波光与本振光在探测器靶面高效拍频,进而提高系统信噪比、探测距离以及径向风速精度。该模块集成了偏振分束棱镜、λ/4波片、λ/2波片、平衡探测器。为了便于研究回波偏振态变化对系统性能的影响,在接收光路中加入λ/4波片,通过改变其光轴与水平方向的夹角以此模拟不同的回波偏振态。
-
回波与本振光的偏振匹配度决定了相干探测的外差效率,影响测风雷达系统的信噪比、探测距离以及径向风速精度。由于本振光在保偏光纤中传输偏振态稳定,而回波光经历复杂的大气传输后被光学系统耦合接收,受大气退偏效应影响偏振态易发生改变,所以有必要分析回波的偏振态特性。
如图 1所示,假设光学系统为理想状态,先利用琼斯矩阵建立回波和本振光经过λ/4波片后的表达式,再用相同方法依次建立经过偏振分束棱镜和λ/2波片后的表达式,然后利用差分相减原理得到平衡探测器输出的两路相位相差90°的光电流,最后将光电流相加得到回波与本振光拍频后输出的总光电流为:
$ I=\sqrt{2}[\sin \Delta \varphi \sin (2 \alpha)+\cos \Delta \varphi]\left|E_{\mathrm{LO}} E_{\mathrm{e}}\right| $
(1) 式中:Δφ为回波与本振光的相位差;α为回波接收光路中λ/4波片光轴与水平方向的夹角;ELO为本振光强;Ee为回波光强。
基于David Fink的外差模型[22],外差效率表示为实际光电流与理想光电流的平方比值,代入式(1),则外差效率为:
$ \eta=\frac{I_{\mathrm{a}}{ }^2}{I_{\mathrm{i}}{ }^2}=\frac{[\cos \Delta \varphi+\sin \Delta \varphi \sin (2 \alpha)]^2}{2} $
(2) 式中:Ia为输出的实际光电流;Ii为输出的理想光电流。
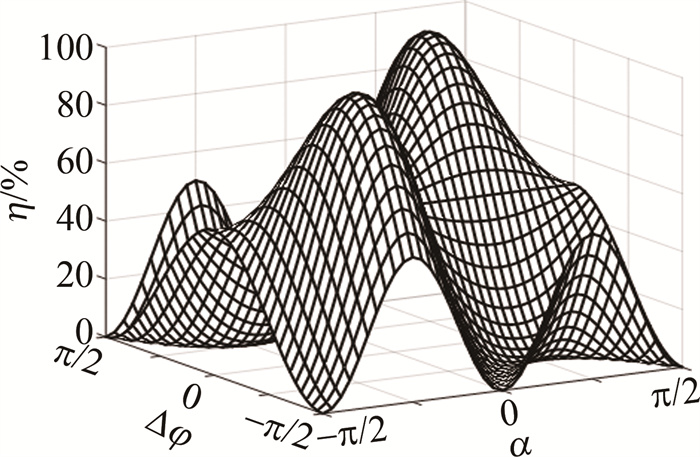
外差效率随波片夹角和相位差的变化曲线如图 2所示。在相位差恒定的情况下,外差效率随波片夹角先增大再减小,并周期性变化,变化周期为π/2。当α=±π/4,即回波为圆偏振态时,外差效率有最大值,理想情形下ηmax=1。外差效率在波动的一个周期内,以最大值为中心呈对称式快速减小,且|α-π/4|越大,外差效率越小。这是因为α≠±π/4时,回波为椭圆偏振态,|α-π/4|是椭圆偏振态椭圆度的表征,其值越大,表明回波与本振光的偏振匹配度越差,故外差效率越低。
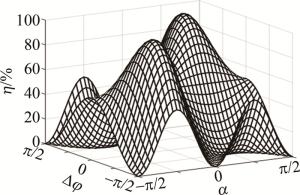
图 2 外差效率随波片夹角和相位差的变化曲线
Figure 2. Curves of heterodyne efficiency versus wave-plate angle and phase difference
由于大气湍流客观存在,回波必然受到退偏作用影响。根据中频信号与噪声的平均功率比值得到相干测风雷达系统的信噪比(signal-to-noise ratio, SNR)为:
$ \begin{gathered} S=\frac{\eta E T \beta \lambda \exp (-2 \sigma L) \pi D^2}{8 h B L^2} \times \\ {\left[1+\left(1-\frac{L}{f}\right)^2\left(\frac{\pi D^2}{4 \lambda L}\right)+\left(\frac{D}{2 S_0}\right)^2\right]^{-1}} \end{gathered} $
(3) 式中:E为发射脉冲能量;T为光学透过率;β为气溶胶后向散射系数;λ为系统工作波长;σ为大气消光系数;D为天线直径;h为普朗克常量;B为探测器带宽;L为探测距离;f为天线焦距;S0为横向相干长度,是L的函数[23],表示为:
$ \begin{gathered} S_0(L)=\left[2.914383\left(\frac{2 \pi}{\lambda}\right)^2 \times\right. \\ \left.\int_0^L C_n^2(<italic>r</italic>)\left(1-\frac{r}{L}\right)^{\frac{5}{3}} \mathrm{~d} r\right]^{-\frac{3}{5}} \end{gathered} $
(4) 式中:r为积分变量;Cn2(r)为大气折射率结构常数,表示为:
$ \begin{aligned} & \quad C_n^2(r)=0.00594\left(\frac{21}{27}\right)^2\left(10^{-2} r\right)^{10} \exp (-r)+ \\ & 2.7 \times 10^{-16} \exp \left(-\frac{r}{1.5}\right)+1.7 \times 10^{-14} \exp (-10 r) \end{aligned} $
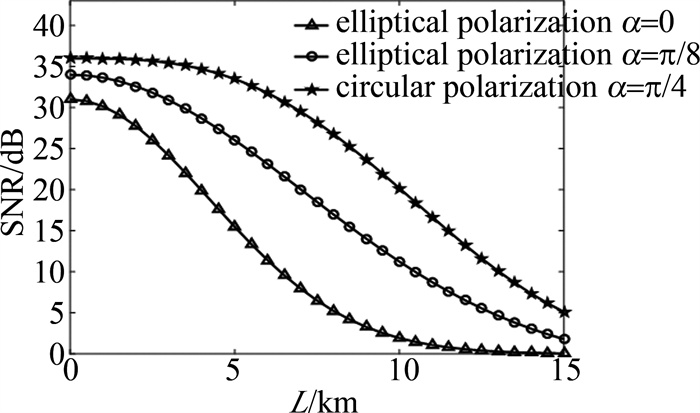
(5) 因为天线为望远系统,所以f=∞,取T=0.8,β=4 ×10-7m-1 · sr-1,σ=2×10-4m-1,h=6.626×10-34J ·s,其余参数取值见表 1,则由式(2)~式(5)得到不同回波偏振态条件下系统信噪比与探测距离的变化曲线,如图 3所示。由图可知,系统信噪比随探测距离的增加而减小,不同回波偏振态情形下,信噪比下降速率和最大探测距离存在差异。当回波为圆偏振时,信噪比变化曲线最为平缓,以S≥5 dB为界,此时最远测程Lmax=15 km;当回波为椭圆偏振时,信噪比曲线变化陡峭,并且椭圆度越大,信噪比下降越快,最远测程Lmax=7 km,相较圆偏振情形,最远测程下降了53.3%。
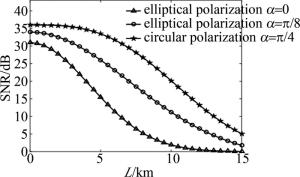
图 3 不同回波偏振态条件下信噪比与探测距离的变化曲线
Figure 3. Curves of SNR versus ranges under different polarization states of echoes
根据克拉美罗界条件[24],估计相干测风激光雷达系统的径向风速误差为:
$ \begin{gathered} \Delta v=\frac{\lambda f_{\mathrm{s}}}{2} \times \\ \sqrt{\frac{(\Delta f)^2}{N_{\mathrm{p}} N_{\mathrm{s}}}\left[\int_{-0.5}^{0.5} \frac{(x / \Delta f)^2}{\left\{1+\left[\frac{S}{\sqrt{2 \pi} \Delta f} \exp \left(-\frac{x^2}{2 \Delta f^2}\right)\right]^{-1}\right\}^2} \mathrm{~d} x\right]^{-1}} \end{gathered} $
(6) 式中:fs为采样频率;Np为脉冲累积数;Ns为距离门内采样点数;x为积分变量;Δf为归一化谱宽,表示为:
$ \Delta f=\frac{\sqrt{\ln 2}}{\sqrt{2} \pi \tau f_s} $
(7) 式中:τ为激光脉冲半峰全宽。
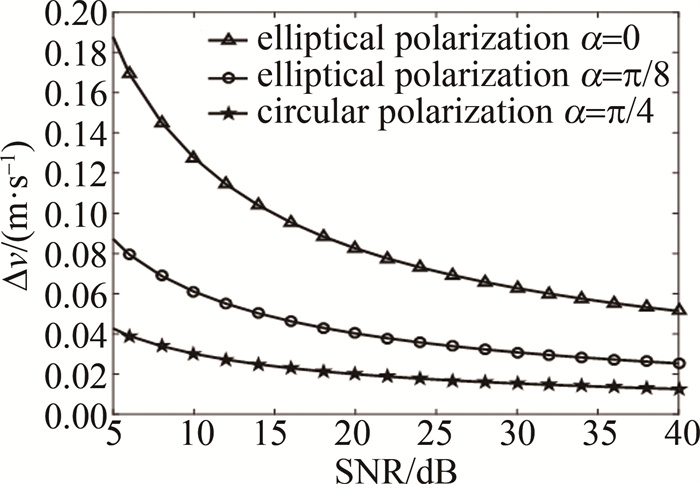
将式(3)代入式(6),取τ=200 ns,Np=3000,Ns=100,其余参数取值见表 1,则不同回波偏振态条件下,径向风速误差与系统信噪比的变化曲线如图 4所示。由图 4可知,相干测风雷达系统的径向风速误差随信噪比的增加而减小。对于回波为圆偏振的情况,当S在(5 dB,40 dB)区间变化时,Δv < 0.05 m/s。对于回波为椭圆偏振的情况,当椭圆偏振度最大(即α=0)时,Δv最大值达到0.19 m/s,相较圆偏振情形,径向风速误差增大约2.8倍。此时,若要Δv < 0.1 m/s,则需S>12 dB,显然,这会对激光器能量、天线口径、探测器量子效率等指标提出更苛刻的要求,不利于系统小型化和成本控制。
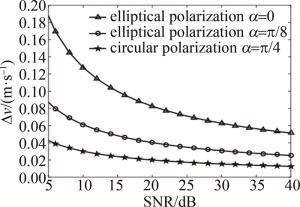
图 4 不同回波偏振态条件下径向风速误差与信噪比的变化曲线
Figure 4. Curves of radial wind speed error versus SNR under different polarization states of echoes
综上可知,为了保证系统的径向风速精度,实现远距离高灵敏度回波探测,大气退偏后的椭圆偏振光在进入接收系统前,应进行补偿修正变为近圆偏振光。
-
系统工作时,通过在接收天线后增加两片串联的λ/4波片,将回波偏振态从椭圆偏振修正为圆偏振。第1个λ/4波片的光轴与椭圆偏振回波的长轴或短轴重合,则经过第1个λ/4波片后,椭圆偏振回波转换为线偏振回波,线偏振方向为椭圆回波外接矩形的对角线方向;第2个λ/4波片光轴与入射前的线偏振方向成±45°夹角,进而实现圆偏振回波输出。实际装调过程中,两个波片的光轴存在旋转角度误差,因此需要分析其对回波偏振态修正的影响。
以椭圆偏振回波的长轴为x轴,短轴为y轴建立直角坐标系,则回波的琼斯矩阵表示为:
$ \boldsymbol{E}_0=\left[\begin{array}{l} 1 \\ \mathrm{i} \rho \end{array}\right] $
(8) 式中:ρ为椭圆偏振光偏振分量振幅比;i为虚数单位。假设第1个λ/4波片的光轴与椭圆偏振回波长轴的角度误差为Δθ1,则经过第1个λ/4波片后的光场为:
$ \left[\begin{array}{c} 1 \\ b_1 \exp \left(\mathrm{i} \Delta \varphi_1\right) \end{array}\right] $
(9) 式中:b1为透射光偏振分量振幅比;Δφ1为偏振分量相位差,分别表示为:
$ b_1=\frac{\sqrt{\rho^2 \cos ^2\left(2 \Delta \theta_1\right)+\left[\rho-\sin \left(2 \Delta \theta_1\right)\right]^2}}{\sqrt{\left[1+\rho \sin \left(2 \Delta \theta_1\right)\right]^2+\cos ^2\left(2 \Delta \theta_1\right)}} $
(10) $ \begin{gathered} \Delta \varphi_1=\arctan \left[-\frac{\rho-\sin \left(2 \Delta \theta_1\right)}{\rho \cos \left(2 \Delta \theta_1\right)}\right]- \\ \arctan \left[-\frac{\cos \left(2 \Delta \theta_1\right)}{1+\rho \sin \left(2 \Delta \theta_1\right)}\right] \end{gathered} $
(11) 令透射光的长轴长度为X,短轴长度为Y,则从第1个λ/4波片透射的光束离心率为:
$ \kappa_1=\sqrt{1-\left(\frac{Y}{X}\right)^2} $
(12) 其中,
$ \frac{Y}{X}=\tan \left\{\frac{\arcsin \left[\sin \left(2 \arctan b_1\right) \sin \Delta \varphi_1\right]}{2}\right\} $
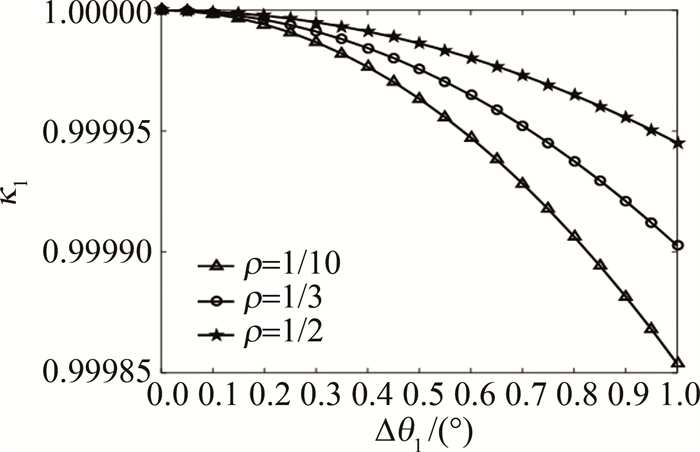
(13) 根据式(11)~式(13)可得到不同回波偏振振幅比时,第一波片旋转角度误差对出射光束离心率的影响曲线,如图 5所示。因假设回波的长轴与x轴重合,所以ρ < 1。当Δθ1=0°时,κ1=1,表明出射光束为线偏振。随着旋转角度误差的增大,离心率减小非常缓慢,特别地,对于ρ=1/10、Δθ1=1°的情形,离心率最小,但仍然有k1>0.99985。可见,第一波片旋转角度误差对出射光束偏振态影响很小。
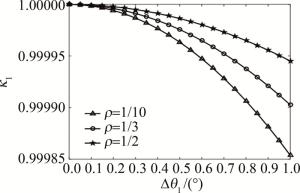
图 5 不同回波振幅比时,第一波片旋转角度误差对出射光束离心率的影响曲线
Figure 5. Curves of beam eccentricity versus rotation angle errorof the first wave-plate under different polarization amplituderatio of echoes
同理,推导从第2个λ/4波片出射的光束离心率为:
$ \begin{aligned} & \kappa_2= \\ & \sqrt{1-\left\{\tan \left(\frac{\arcsin \left[\sin \left(2 \arctan b_2\right) \sin \Delta \varphi_2\right]}{2}\right)\right\}^2} \end{aligned} $
(14) 式中:b2为透射光偏振分量振幅比;Δφ2为偏振分量相位差,分别表示为:
$ b_2=\frac{\sqrt{1+\sin ^2\left(2 \Delta \theta_2\right)}}{\cos \left(2 \Delta \theta_2\right)} $
(15) $ \Delta \varphi_2=\arctan \left[\sin \left(2 \Delta \theta_2\right)\right]-\frac{\pi}{2} $
(16) 式中:Δθ2为第2个λ/4波片光轴与入射前的偏振方向的角度误差。
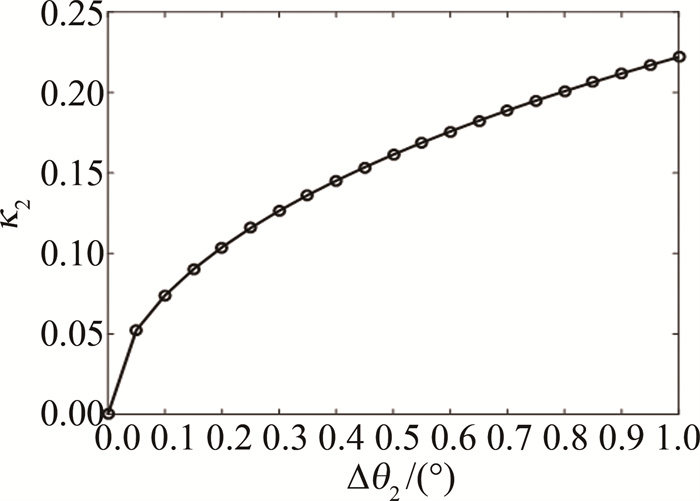
图 6为第二波片旋转角度误差对出射光束离心率的影响曲线。当Δθ2=0°时,k2=0,表明出射光束为圆偏振。随着旋转角度误差的增大,离心率快速增大,当Δθ2>0.2°时,k2>0.1,此时出射光变为椭圆偏振。可见,第二波片旋转角度误差对出射光束偏振态影响显著,需要及时修正。
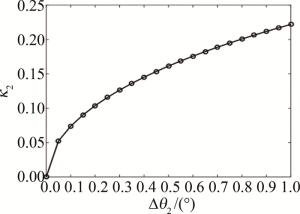
图 6 第二波片旋转角度误差对出射光束离心率的影响曲线
Figure 6. Curves of beam eccentricity versus rotation angle error of the second wave plate
综上分析,实际应用中,需采用力矩电机直驱方式旋转第1个波片,旋转精度应优于1°,采用蜗轮蜗杆传动方式旋转第2个波片,旋转精度应优于0.2°。
-
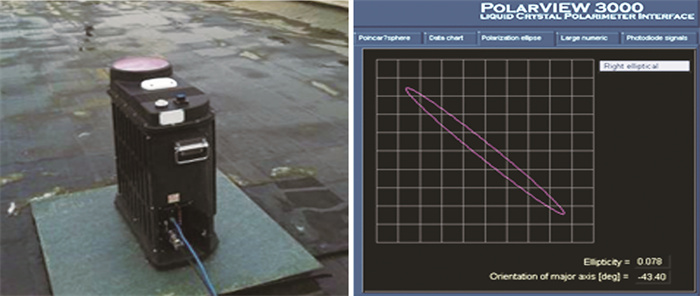
根据光路可逆原理,在接收光路焦平面处放置共轭光源,沿接收路径反向发射激光。利用偏振分析仪测量输出光束的偏振态来模拟回波偏振态,分别记录椭圆偏振和圆偏振时两个波片的驱动电机位置,然后将标定好的测风激光雷达进行径向风速测量,如图 7所示。

图 7 实验系统示意图
Figure 7. Diagram of experiment system
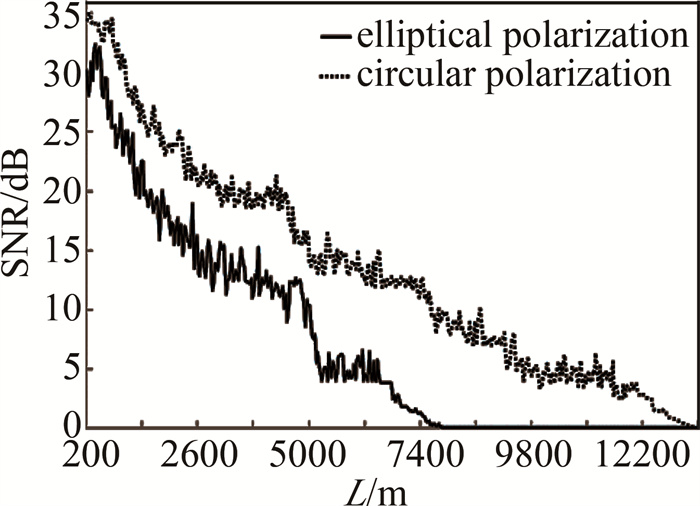
雷达系统参数见表 1,实验当天天气条件:阴,温度10 ℃~15 ℃,湿度70%,气压944 hPa,能见度5 km,测量结果如图 8所示。当回波为椭圆偏振态时,系统信噪比随探测距离的增加而快速减小,最大探测距离为6.5 km;当回波为圆偏振态时,信噪比包络曲线平缓降低,最大探测距离可达12.2 km。实测结果与仿真结果变化趋势吻合,但实测值小于理论值,且曲线局部陡峭波动,可能是因为仿真建模时大气折射率结构常数由经验公式表示,而实测过程中大气扰动具有瞬时不确定性,造成回波偏振态失配的同时,产生了相位误差,导致相干效率下降。
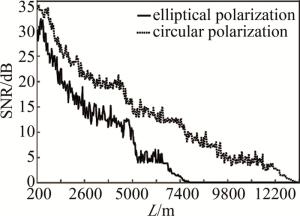
图 8 不同回波偏振态时,信噪比与探测距离的变化曲线
Figure 8. Diagram of SNR versus ranges under different polarization states of echoes
为了验证不同回波偏振态对系统径向风速精度的影响,开展了系统比对实验。基准雷达采用已定型产品,该产品经中国气象局气象计量站检测合格。实验前,测试系统与基准系统进行校时和径向对准;实验中,两个系统对相同天气条件进行同步测量;实验后,统计相同探测距离处的有效数据,计算径向风速标准偏差,结果如表 2所示。
表 2 径向风速误差比对结果
Table 2. Comparison results of radial wind speed error
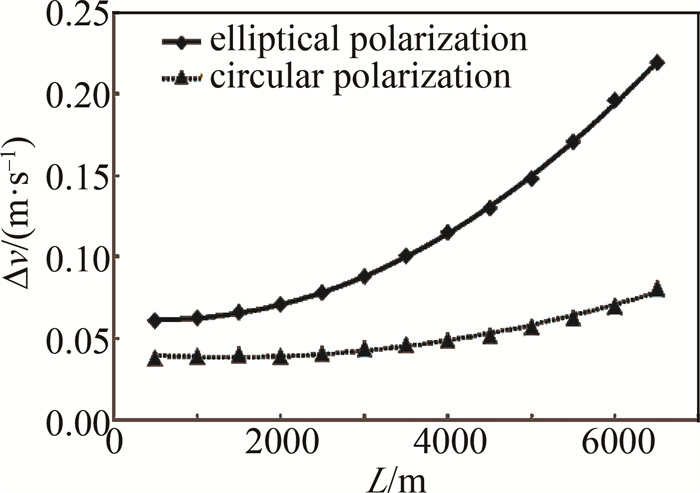
ranges/m radial wind speed error/(m·s-1) elliptical polarization circular polarization 500 0.061 0.038 1000 0.063 0.039 1500 0.066 0.039 2000 0.071 0.04 2500 0.078 0.041 3000 0.088 0.044 3500 0.101 0.046 4000 0.115 0.049 4500 0.13 0.052 5000 0.148 0.057 5500 0.171 0.063 6000 0.196 0.07 6500 0.219 0.081 不同回波偏振态情形下系统径向风速误差的变化曲线如图 9所示。随着探测距离的增加,系统信噪比降低,径向风速误差增大。对于相同探测距离,回波为圆偏振时的径向风速精度优于回波为椭圆偏振的情形,探测距离越大,优势越明显。例如,当探测距离为6.5 km时,较回波为椭圆偏振情形,回波为圆偏振时的径向风速精度提高了63%。测量拟合曲线与理论仿真曲线的变化规律相符,但实测的系统径向风速误差数值更大,这是因为公式中的大气消光系数和后向散射系数取值与实际天气情况存在差异,同时建模时忽略了光轴装调误差的影响。
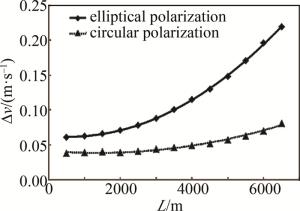
图 9 不同回波偏振态时,径向风速误差与探测距离的变化曲线
Figure 9. Diagram of radial wind speed error versus ranges under different polarization states of echoes
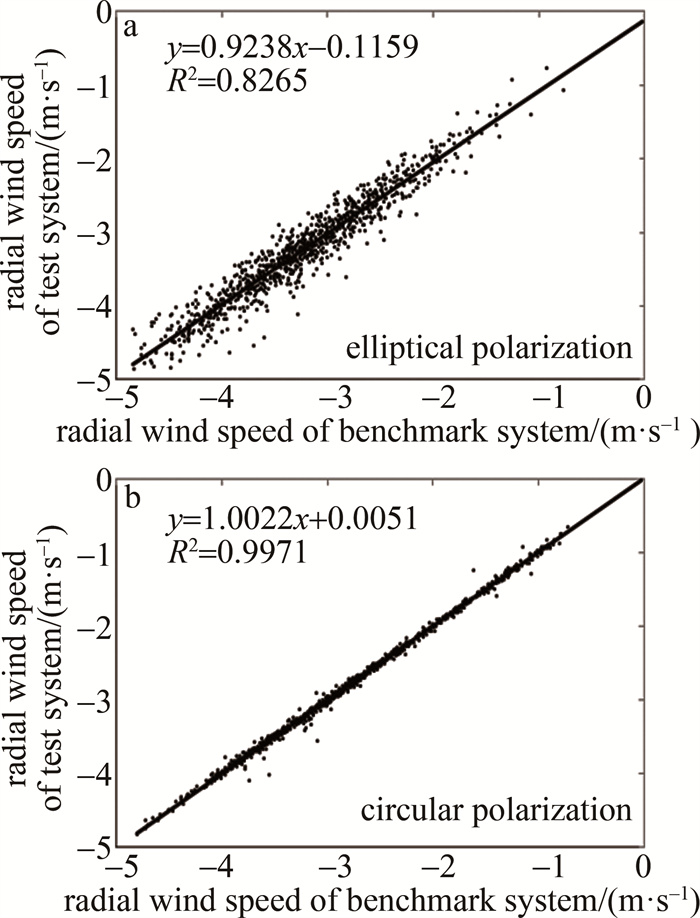
为了对数据进行相关性分析,分别对不同回波偏振态情形下,测试系统与基准系统径向风速散点数据进行线性拟合,如图 10所示。其中,探测距离6.5 km,有效数据样本数各1005组。由图可见,回波为椭圆偏振态时,测试系统与基准系统径向风速的相关系数R2=0.8265,当回波为圆偏振态时,R2=0.9971,表明此时数据的相关度更高,一致性更好,进一步证明了回波为圆偏振时的径向风速精度更高。
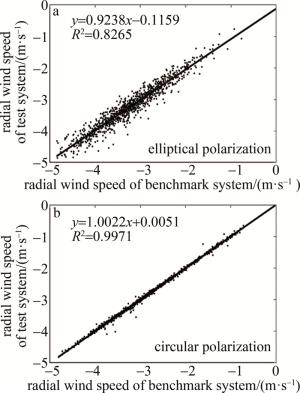
图 10 不同回波偏振态时,测试系统与基准系统径向风速数据拟合曲线
Figure 10. Fitting curves of radial wind speedof test system and benchmark system under different polarization states of echoes
-
基于相干多普勒激光测风雷达的系统组成和工作原理,仿真分析了回波偏振态对相干探测外差效率、信噪比、探测距离以及径向风速精度的影响。提出回波偏振态修正途径,并利用琼斯矩阵建模,分析了修正精度。采用系统比对法,开展了不同回波偏振态对系统径向风速精度影响的验证实验。结果表明,当回波为圆偏振态时,信噪比包络曲线平缓降低,最大探测距离达12.2 km;当回波为椭圆偏振态时,系统信噪比随探测距离的增加而快速减小,最大探测距离为6.5 km,下降了46.7%。对于相同探测距离,回波为圆偏振时的径向风速精度优于回波为椭圆偏振的情形,探测距离越大,优势越明显。特别对于回波为椭圆偏振态情形,在其最远探测距离处,径向风速精度为0.219 m/s,而圆偏振情形下为0.081 m/s,提高了63%。此外,回波为椭圆偏振态时,测试系统与基准系统径向风速的相关系数为0.8265;回波为圆偏振态时,相关系数为0.9971,表明此时数据的相关度更高,一致性更好。由于相干风场探测的偏振匹配不仅与大气退偏作用后回波的偏振特性有关,还与雷达系统中激光器、保偏光纤器件的偏振性能密切相关,因此,还应该创新优化偏振器件制作工艺以提升其关键指标。
该研究对相干多普勒激光测风雷达回波接收模块的优化提供了理论支撑,对远程多气象要素探测雷达系统的设计具有参考意义。
相干测风激光雷达回波偏振态对径向风速精度影响
Influence of echo polarization of coherent wind LiDAR on radial wind speed accuracy
-
摘要: 为了解决大气退偏效应造成激光回波与本振光偏振失配,导致相干测风激光雷达(LiDAR)外差效率降低的问题,基于相干多普勒激光测风雷达的系统组成和工作原理,采用数学建模法,仿真分析了回波偏振态对系统信噪比、探测距离和径向风速误差的影响;提出了偏振态修正途径,并利用琼斯矩阵建模讨论修正精度;用径向风速比对实验验证不同回波偏振态对径向风速精度的影响。结果表明,对于同一测试系统,在相同的天气条件下,与回波为圆偏振态相比,回波为椭圆偏振态时的最大探测距离下降46.7%,径向风速精度下降63%。此研究为相干多普勒测风激光雷达回波接收模块的优化提供了理论支撑。Abstract: In order to solve the polarization mismatch between echo and local oscillator caused by the atmospheric depolarization effect leading to a decrease in heterodyne efficiency of coherent wind light detection and ranging (LiDAR), the influence of echo polarization on signal-to-noise ratio and ranges and radial wind speed error was simulated using mathematical modeling method, based on the system composition and working principle of coherent Doppler wind LiDAR. By proposing a polarization state correction approach and using Jones matrix, a model was built to discuss the correction accuracy. According to the comparative test of radial wind speed, the influence of different echo polarization on radial wind speed accuracy was verified. The results show that for the same system and weather, if the echo is elliptical polarization, the maximum range will decrease by 46.7% and the radial wind speed accuracy will decrease by 63% compared to the circular polarization. This study provides theoretical support for the optimization of echo receiving module of coherent Doppler wind LiDAR.
-
Key words:
- laser technique /
- radial wind speed accuracy /
- verification test /
- echo polarization
-
图 2 外差效率随波片夹角和相位差的变化曲线
Figure 2. Curves of heterodyne efficiency versus wave-plate angle and phase difference
图 3 不同回波偏振态条件下信噪比与探测距离的变化曲线
Figure 3. Curves of SNR versus ranges under different polarization states of echoes
图 4 不同回波偏振态条件下径向风速误差与信噪比的变化曲线
Figure 4. Curves of radial wind speed error versus SNR under different polarization states of echoes
图 5 不同回波振幅比时,第一波片旋转角度误差对出射光束离心率的影响曲线
Figure 5. Curves of beam eccentricity versus rotation angle errorof the first wave-plate under different polarization amplituderatio of echoes
图 6 第二波片旋转角度误差对出射光束离心率的影响曲线
Figure 6. Curves of beam eccentricity versus rotation angle error of the second wave plate
图 8 不同回波偏振态时,信噪比与探测距离的变化曲线
Figure 8. Diagram of SNR versus ranges under different polarization states of echoes
图 9 不同回波偏振态时,径向风速误差与探测距离的变化曲线
Figure 9. Diagram of radial wind speed error versus ranges under different polarization states of echoes
图 10 不同回波偏振态时,测试系统与基准系统径向风速数据拟合曲线
Figure 10. Fitting curves of radial wind speedof test system and benchmark system under different polarization states of echoes
表 1 系统主要技术参数
Table 1. Main parameters of system
parameter value wavelength 1.55 μm pulse energy 200 μJ pulse repetition frequency 8 kHz shifted frequency 80 MHz telescope diameter 100 mm 3 dB bandwidth 200 MHz sampling rate 500 MHz  下载: 导出CSV
下载: 导出CSV
表 2 径向风速误差比对结果
Table 2. Comparison results of radial wind speed error
ranges/m radial wind speed error/(m·s-1) elliptical polarization circular polarization 500 0.061 0.038 1000 0.063 0.039 1500 0.066 0.039 2000 0.071 0.04 2500 0.078 0.041 3000 0.088 0.044 3500 0.101 0.046 4000 0.115 0.049 4500 0.13 0.052 5000 0.148 0.057 5500 0.171 0.063 6000 0.196 0.07 6500 0.219 0.081
下载: 导出CSV
-
[1] 范琪, 朱晓林, 周鼎富, 等. 激光测风雷达分析典型高原机场风场特征[J]. 激光技术, 2020, 44(5): 525-531. FAN Q, ZHU X L, ZHOU D F, et al. Analysis of the wind field characteristics using the wind lidar in a typical plateau airport[J]. Laser Technology, 2020, 44(5): 525-531 (in Chiness). [2] TORUN R, BAYER M M, ZAMAN I U, et al. Realization of multitone continuous wave lidar[J]. IEEE Photonics Journal, 2019, 11(4): 5501910. [3] ZHANG Y, WU Y B, XIA H Y. High resolution coherent Doppler wind lidar incorporating phase-shift keying[J]. Journal of Lightwave Technology, 2022, 40(22): 7471-7478. doi: 10.1109/JLT.2022.3202836 [4] WEI T W, XIA H Y, YUE B, et al. Remote sensing of raindrop size distribution using the coherent Doppler lidar[J]. Optics Express, 2021, 29(11): 17246-17257. doi: 10.1364/OE.426326 [5] XU H, LI J B. Performance analysis of dual-frequency lidar in the detection of the complex wind field[J]. Optics Express, 2021, 29(15): 23524-23539 doi: 10.1364/OE.431069 [6] SHADDOCK D A. Digitally enhanced heterodyne interferometry[J]. Optics Letters, 2007, 32(22): 3355-3357. doi: 10.1364/OL.32.003355 [7] 李超林, 刘俊辰, 张福民, 等. 频率调制连续波激光雷达测量技术的非线性校正综述. 光电工程, 2022, 49(7): 210438. LI Ch L, LIU J Ch, ZHANG F M, et al. Review of nonlinearity correction of frequency modulated continuous wave LiDAR measurement technology. Opto-Electronic Engineering, 2022, 49(7): 210438(in Chiness). [8] 赵浴阳, 周鹏飞, 解天鹏, 等. 单光子激光雷达技术发展现状与趋势. 光电工程, 2024, 51(3): 240037. ZHAO Y Y, ZHOU P F, XIE T P, et al. Development status and trends of single-photon LiDAR technology[J]. Opto-Electronic Engineering, 2024, 51(3): 240037(in Chiness). [9] 李岸然, 邵光存, 靳凤宇, 等. 高精度相位式激光雷达测距系统的设计. 光电工程, 2024, 51(3): 230246. LI A R, SHAO G C, JIN F Y, et al. Design of high precision phase laser radar ranging system. Opto-Electronic Engineering, 2024, 51(3): 230246(in Chiness). [10] 彭涛, 陈涌, 赵培娥, 等. 光纤脉冲相干测风激光雷达光学天线特性分析[J]. 激光技术, 2022, 46(4): 511-515. PENG T, CHEN Y, ZHAO P E, et al. Character analysis of fiber coherent LiDAR antenna[J]. Laser Technology, 2022, 46(4): 511-515 (in Chiness). [11] SMALIKHO I N, BANAKH V A. Measurements of wind turbulence parameters by a conically scanning coherent Doppler lidar in the atmospheric boundary layer[J]. Atmospheric Measurement Techniques, 2017, 10(11): 4191- 4208. [12] FRECHLICH R, MEILLIER Y, JENSEN M L, et al. Measurements of boundary layer profiles in an urban environment[J]. Journal of Applied Meteorology and Climatology, 2006, 45(6): 821-837. [13] SMALIKHO I, KOPP F, RAHM S. Measurement of atmospheric turbulence by 2 μm Doppler lidar[J]. Journal of Atmospheric and Oceanic Technology, 2005, 22(11): 1733-1747. [14] 陈晓敏, 张洪玮, 孙康闻, 等. 基于相干多普勒激光雷达的斜程湍流参数反演方法研究[J]. 大气与环境光学学报, 2023, 18(1): 1-13. CHEN X M, ZHANG H W, SUN K W, et al. Inversion methods of slant turbulence parameters based on coherent Doppler lidar[J]. Journal of Atmospheric and Environmental Optics, 2023, 18(1): 1-13 (in Chiness). [15] ABARI C F, CHU X Z, HARDESTY R M, et al. A reconfigurable all-fiber polarization-diversity coherent Doppler lidar: Principles andnumerical simulations[J]. Applied Optics, 2015, 54(30): 8999-9009. [16] 罗敬, 高精度偏振激光雷达关键技术及系统研究[D]. 杭州: 浙江大学, 2018: 19-108. LUO J. Research on key technologies and system of high-precision polarization lidar[D]. Hangzhou: Zhejiang University, 2018: 19-108 (in Chiness). [17] KLIEBISCH O, UITTENBOSCH H, THURN J, et al. Coherent Doppler wind lidar with real-time wind processing and low signal-to-noise ratio reconstruction based on a convolutional neural network[J]. Optics Express, 2022, 30(4): 5540-5552. [18] BANZHAF S, WALDSCHMIDT C. Phase-code-based modulationfor coherent lidar[J]. IEEE Transactions on Vehicular Technology, 2021, 70(10): 9886-9897. [19] WOLFE S, SHIRAHATA T, SET S Y, et al. Optical single-sideband modulation for a coherent Doppler lidar[J]. Optics Letters, 2022, 47(17): 4520- 4523. [20] SPULER S M, RICHTER D R, SPOWART M P, et al. Optical fiber-based laser remote sensor for airborne measurement of wind velocity and turbulence[J]. Applied Optics, 2011, 50(6): 842-851. [21] LIANG C, WANG C, XUE X H, et al. Meter-scale and sub-second-resolution coherent Doppler wind LiDAR and hyperfine wind observation[J]. Optics Letters, 2022, 47(13): 3179-3182. [22] FINK D. Coherent detection signal-to-noise[J]. Applied Optics, 1975, 14(3): 689-690. [23] 步志超, 郭磐, 陈思颖, 等. 相干测风激光雷达望远镜孔径及截断因子的优化分析[J]. 红外与激光工程, 2014, 43(3): 694-699. BU Z C, GUO P, CHEN S Y, et al. Optimization analysis of telescope aperture and truncation factor of coherent LiDAR[J]. Infrared and Laser Engineering, 2014, 43(3): 694-699 (in Chiness). [24] FREHLICH R. Cramer-Rao bound for Gaussian random processes and applications to radar processing of atmospheric signals[J]. IEEE Transactions on Geoscience Remote Sensing, 1993, 31(6): 1123-1131. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 2685
- HTML全文浏览量: 226
- PDF下载量: 202
- 被引次数: 0
