 网站地图
网站地图

-
光电跟踪系统是一种复杂的高精度伺服系统,主要完成对目标的精确定位、跟踪和瞄准等任务[1-4],在航空航天[5]、量子通信[6]、光电侦察[7]等系统中发挥着重要作用。实际工作中,系统扰动抑制得到的误差和目标进行动态跟踪得到的误差是系统视轴误差的两个主要组成部分[8],其中光电跟踪系统受到的扰动主要有电机扰动、模型扰动和力矩扰动,而力矩扰动又由摩擦力矩和外部扰动力矩组成[9]。在影响系统跟踪精度的众多扰动中,摩擦力矩扰动的存在非同小可[10]。单侧支撑水平式光电跟踪实验平台因其特殊的结构形式,导致摩擦不均匀性强,平台转动到不同位置所受的摩擦力矩扰动不一致,且摩擦力矩扰动容易随着外界环境变化而变化,致使系统在跟踪过程中产生速度过零时的波形畸变、系统视轴稳定精度出现极大值等问题,严重降低了系统的整体性能[7]。
摩擦补偿方法依据是否需要模型可分为基于模型和基于非模型的两种补偿方法。从现有的摩擦模型中选择一种适合本系统摩擦特性的特定模型是典型的基于模型的补偿方法,通过实验辨识模型参数,实现对摩擦的补偿[11]。NIU等人[12]先输入前馈信号构建Stribeck摩擦模型对系统进行摩擦超前补偿,再调节比例-积分-微分(proportional-integral-derivative,PID)控制器达到了较高的动态跟踪精度。此外还有针对光电跟踪系统,提出改进型LuGre摩擦模型与鲁棒自适应相结合,以减小摩擦和外部扰动的影响[13]。目前较常用的静态模型和动态模型分别为Stribeck模型和LuGre模型[14],其它传统的基于摩擦模型的补偿方法效果不太好[15-17],考虑到摩擦是动态变化的,综合对比选择了较为完善的LuGre模型。然而,在实际中,摩擦辨识是不完全精确的,系统的摩擦也是不断变化的,但摩擦参数不能跟随摩擦实时变化,这将使补偿结果出现较大偏差,所以需要采用非模型补偿方法对现有系统进行再次补偿。
将摩擦视为外部扰动,通过设计干扰观测器对系统中的摩擦力矩进行观测达到摩擦补偿效果[18],是一种常见的非模型补偿方法。该方法能够根据摩擦变化的大小进行自适应补偿,进而对实时变化的摩擦能达到较好的补偿作用。CHEN等人[19]设计了基于Stribeck模型补偿器和干扰观测器(disturbance observer,DOB)的闭环控制系统,减小低速时死区影响,改善机载平台跟踪性能。YU等人[20]建立LuGre摩擦模型后,通过最小二乘法估计得到系统加速度值,设计基于平台角位置的扰动观测器,实现了对系统摩擦的观测和前馈补偿。尽管以上方法能够对摩擦进行一定补偿,但是由于摩擦在速度过零时变化较快,现有单侧支撑水平式光电跟踪实验平台单侧支撑的机架结构导致摩擦分布不均匀,环境的变化也会干扰对系统摩擦的补偿,而传统扰动观测器响应速度比较慢,并不能及时观测到摩擦变化,因此需要响应快的观测器来观测系统摩擦。
滑模控制技术具有算法简单、非线性、动态响应快[21-24]等特点,而基于滑模控制方法设计的观测器继承了这些特点,因而比传统扰动观测器具有更优异的性能,受到了广泛的研究和应用[25-27]。然而,滑模控制的抖振问题影响系统跟踪性能。此外,目前参考文献中设计的滑模观测器大都是基于线性滑面,其只能实现渐进收敛。相比于线性滑模面,终端滑模面在减少抖振、提高精度、有限时间稳定性等方面具有更多的优势[28-29]。但由于摩擦在设备速度过零时具有变化剧烈的特性,受限于观测器带宽,补偿能力往往有限。现有学者还采用神经网络控制[30]和模糊控制[31]等摩擦补偿方法,但神经网络需要训练,算法实时性较差;模糊控制需要设计者有丰富经验,这些在实际系统中实施较为困难。
无论是模型还是非模型补偿,都具有自身的优势和局限性,基于摩擦模型的补偿方法机理清晰且针对性强,但是由于现有平台的特殊性会造成参数辨识较困难,因而模型建立不精确[32];而基于非模型的补偿方法可以对系统摩擦进行实时补偿、鲁棒性较强,但是很难消除零速区域摩擦的非线性。综合以上情况,为了更好地解决单侧支撑水平式光电跟踪实验平台摩擦问题,本文中提出以LuGre模型和终端滑模观测器(terminal sliding mode observer,TSMO)为基础,将LuGre模型和TSMO(LuGre model and TSMO,LuGre-TSMO)融合补偿方法。在使用摩擦模型补偿的同时,设计一种基于新型趋近律的终端滑模观测器进行摩擦的补偿。首先基于单侧支撑水平式跟踪实验平台,利用扫频仪获取了该平台的传递函数模型;其次基于零极点对消方法设计了该系统的速度闭环控制器,再利用改进型粒子群算法辨识了LuGre摩擦模型的参数,对系统进行前馈补偿;然后设计了一种基于新型趋近律的终端滑模观测器,改善滑模抖振问题,同时也实现系统摩擦的2次补偿;利用仿真技术验证了LuGre-TSMO方法有效性进,最后在单侧支撑水平式跟踪实验平台上进行了实验。实验结果表明,所提出的LuGre-TSMO方法能够实现对摩擦更为精确的补偿,提升了系统的跟踪精度。
-
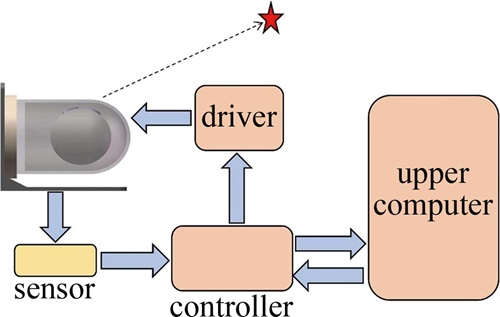
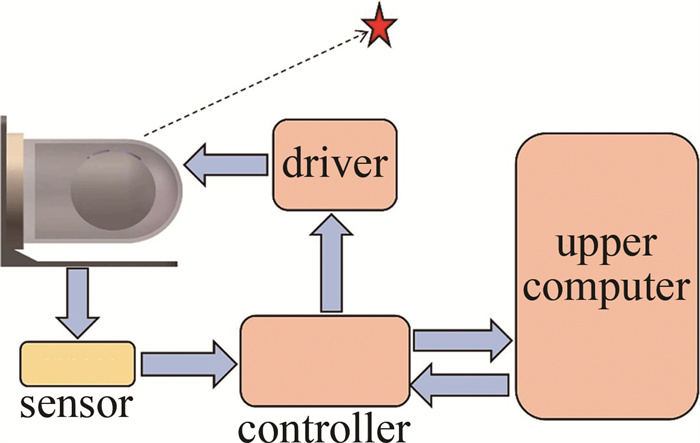
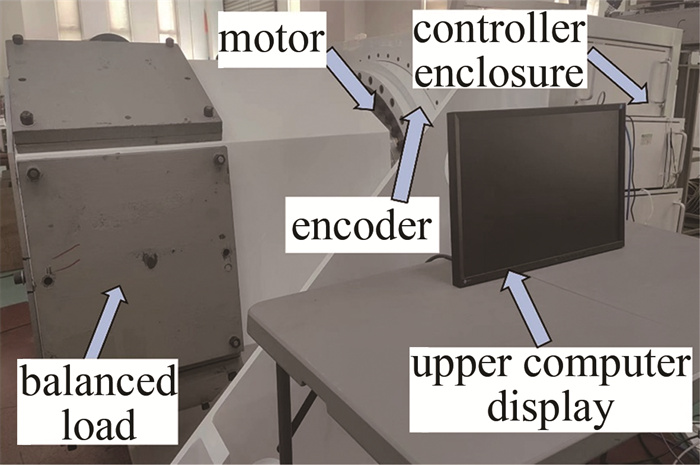
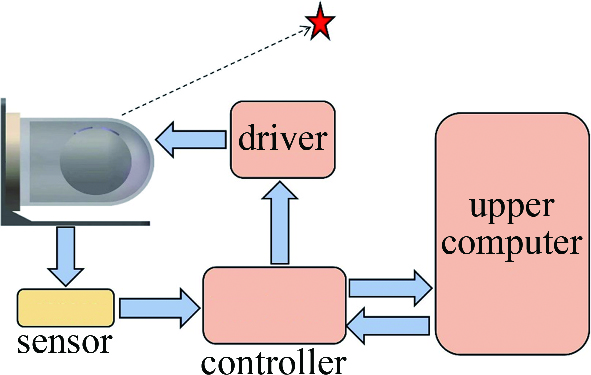
相比于传统地平式跟踪机架,单侧支撑水平式跟踪机架能够避免天顶盲区,安装在车载、机载等运动平台上时也方便运输。然而受安装方式影响,该跟踪机架受力接触面只有一侧,由于重力作用,使底座界面受力不均匀,导致摩擦力分布不均匀,严重影响系统跟踪精度。单侧支撑水平式跟踪机架原理图如图 1所示,实验设备如图 2所示。该系统包括机架、控制器和驱动设备。机架通过永磁同步力矩电机驱动,其上安装有高精度位置编码器,系统工作频率为2000 Hz。
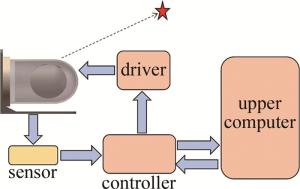
图 1 光电跟踪平台结构图
Figure 1. Structure diagram of photoelectric tracking platform
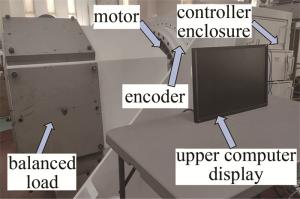
图 2 实验设备
Figure 2. Experimental equipment
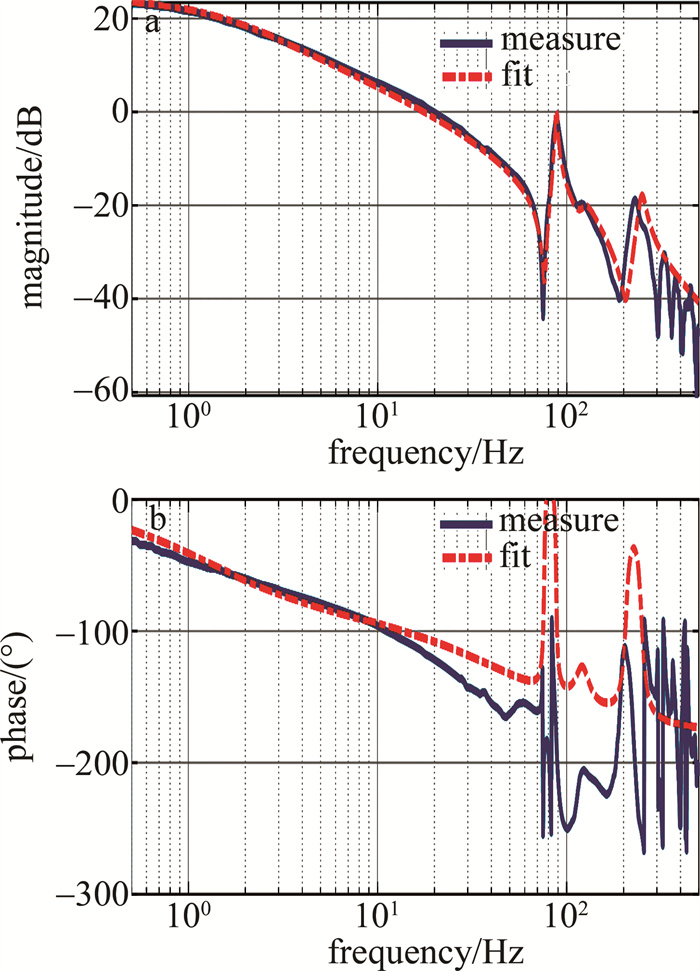
通过正弦扫频获得该系统速度开环响应曲线,如图 3所示。
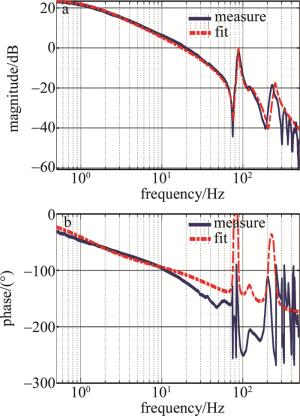
图 3 开环响应曲线
Figure 3. Open-loop response curve
系统的位置开环传递函数G(s)由曲线拟合得到,即:
$ G(s)=G_1(s) G_2(s) G_3(s) G_4(s) $
(1) 式中:s表示拉普拉斯变换的复变量,且:
$ \left\{\begin{array}{l} G_1(s)=\frac{16}{0.0004222 s^2+0.1358 s+1} \\ G_2(s)=\frac{1.341 s^2+19.21 s+3.057 \times 10^5}{s^2+16.59 s+3.057 \times 10^5} \\ G_3(s)=\frac{1.104 s^2+163.7 s+6.07 \times 10^5}{s^2+155.8 s+6.07 \times 10^5} \\ G_4(s)=\frac{1.461 s^2+170.2 s+2.448 \times 10^5}{s^2+140.8 s+2.448 \times 10^5} \end{array}\right. $
(2) -
为了实现稳定闭环,采用零极点对消方法设计了速度控制器C(s)的传递函数模型,见下:
$ C(s)=\frac{334.6 s+8468}{s^2+544 s} $
(3) 速度跟踪过程中,非线性摩擦力的存在会使跟踪曲线在速度过零时出现明显变形,造成了跟踪“死区”的情况[33],采用单一控制器无法有效地完成跟踪任务。
-
为了尽可能避免上述“死区”现象,本节中设计LuGre摩擦模型对非线性摩擦进行前馈补偿。LuGre摩擦模型参数依据实验测得的一组驱动力矩和角速度进行辨识。
本文中采用LuGre模型描述系统机架间特有的摩擦情况[34],见下:
$ \left\{\begin{array}{l} T_{\mathrm{L}}=\sigma_0 z+\sigma_1 \dot{z}+\sigma_2 \omega \\ \dot{z}=\omega-\frac{|\omega|}{g(\omega)} z \\ \sigma_0 g(\omega)=T_{\mathrm{C}}+\left(T_{\mathrm{s}}-T_{\mathrm{C}}\right) \exp \left[-\left(\frac{\omega}{\omega_{\mathrm{S}}}\right)^2\right] \end{array}\right. $
(4) 式中:z为鬃毛平均形变;$ \dot{z}$表示z的微分;TC为库伦摩擦力矩;Ts为最大静摩擦力矩;TL为LuGre摩擦模型估计量;σ0为鬃毛刚度;σ1为微观阻尼系数;σ2为粘滞摩擦系数;ωS为Stribeck角速度;ω为相对运动角速度;g(ω)为摩擦Stribeck效应函数。
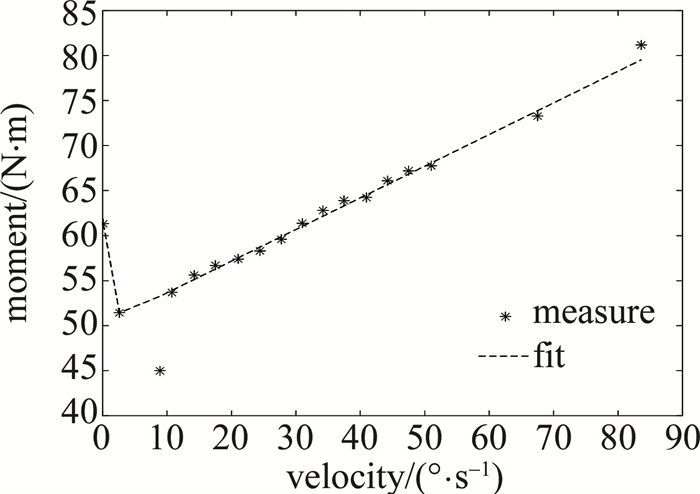
6个待辨识的参数存在于LuGre摩擦模型(见式(4))中,4个静态参数分别是TC、Ts、σ2和ωS,两个动态参数为σ1和σ0,通过实验对这6个参数进行辨识:在匀速运动情况下先采用曲线拟合得到TC和σ2,再利用改进型粒子群算法[35]拟合,计算出Ts和ωS,拟合曲线如图 4所示。
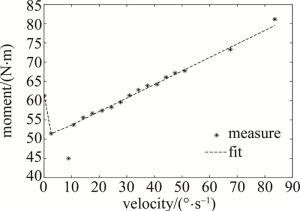
图 4 粒子群算法拟合曲线
Figure 4. Particle swarm optimization is used to the fitting curve
由于库伦摩擦力矩影响,系统低速运动时,运动状态会不明显,此时TL≈TC,z≈xs,$ \dot{z}$≈ω,xs为静摩擦区域的稳态位移,能够近似计算出σ0[36]:σ0≈TCsgn(ω)/xs。
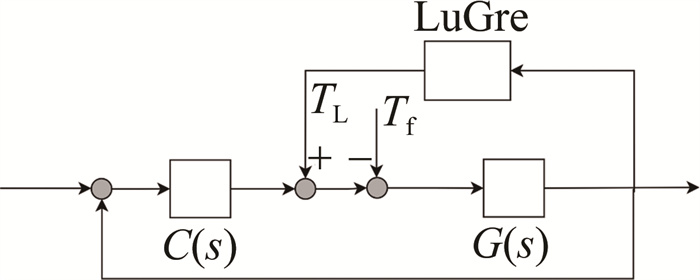
根据TL=σ0xs+(σ1+σ2)ω计算出σ1。表 1中列出了LuGre模型参数理论计算的辨识结果。基于LuGre模型前馈补偿的控制系统结构如图 5所示。图中,Tf为系统摩擦。
表 1 LuGre摩擦模型参数辨识结果
Table 1. Parameter identification results of LuGre friction model
model parameter identification result TC 50.1416 N·m Ts 61.3567 N·m σ2 0.3514 N·m/rad σ0 5014.16 N·m/rad σ1 100.548 N·m/rad ωS 1.4157 rad/s 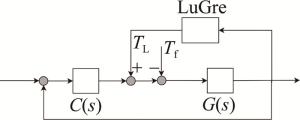
图 5 单个LuGre模型前馈补偿结构图
Figure 5. Compensation structure diagram of single LuGre model feedforward
单侧支撑水平式跟踪实验平台底座由于重力作用导致受力不均匀进而造成摩擦分布不均匀的特点,与此同时,其它外部干扰的存在也对系统产生很大影响。因此,只依靠基于LuGre摩擦模型的补偿方法会产生模型建立不准确、误差较大等问题,无法得到较好的控制效果。本文作者针对上述这些问题,设计了终端滑模观测器对扰动进行观测,从而2次补偿系统的摩擦,其不需要建立被控对象的数学模型,为解决系统中的摩擦问题开辟了新的途径,不仅能够补偿摩擦,还能抑制系统其它干扰,弥补了由于摩擦模型不准确对系统造成的影响。
-
本文作者设计一种新型趋近律应用于滑模干扰观测器中,将系统摩擦和其它扰动进行集总观测,利用观测结果对系统进行反馈补偿,提高跟踪精度。
为方便设计滑模干扰观测器,取被控对象的低频传递函数为:
$ G_{\mathrm{p}}(s)=\frac{k}{s^2+a s+b} $
(5) 式中:a=321.6485,b=2368.5457,k=37896.7314,均为系统参数。
取系统状态为:x1=θ, x2= $ \dot{\theta}$,其中θ表示系统速度,$ \dot{\theta}$表示系统加速度。式(5)可以等效表示为状态空间的形式:
$ \left\{\begin{array}{l} \dot{x}_1=x_2 \\ \dot{x}_2=-a x_2-b x_1+k u \end{array}\right. $
(6) 式中:$ \dot{x}_1$表示x1的微分;$ \dot{x}_2$表示x2的微分;u表示系统控制量。
经过LuGre模型补偿后,系统的状态空间表示为:
$ \left\{\begin{array}{l} \dot{x}_1=x_2 \\ \dot{x}_2=-a x_2-b x_1+k\left(u-\tilde{T}_{\mathrm{L}}\right) \end{array}\right. $
(7) 式中:$ \tilde{T}_{\mathrm{L}}=T_{\mathrm{L}}-T_{\mathrm{f}}$表示LuGre模型摩擦补偿误差。为了对剩余摩擦以及干扰进行补偿,设计滑模干扰观测器为:
$ \left\{\begin{array}{l} \dot{\hat{x}}_1=\hat{x}_2-l_1 \operatorname{sgn}\left(\tilde{x}_1\right) \\ \dot{\hat{x}}_2=-a \hat{x}_2-b \hat{x}_1+k\left(u-\hat{T}_{\mathrm{d}}\right)-l_2 \operatorname{sgn}\left(\tilde{x}_1\right) \end{array}\right. $
(8) 式中:$ \hat{x}_1$是x1的估计值;$ \hat{x}_2$是x2的估计值;$ \dot{\hat{x}}_1$表示$ \hat{x}_1$的微分;$ \dot{\hat{x}}_2$表示$ \hat{x}_2$的微分;l1>0,l2>0为观测器增益;$ \tilde{x}_1=\hat{x}_1-x_1$为位置观测误差;$ \tilde{x}_2=\hat{x}_2-x_2$为速度观测误差;$ \hat{T}_{\mathrm{d}}$为终端滑模观测器观测量。式(8)减去式(7),并令$ \tilde{T}_{\mathrm{L}}$=0,可以得到观测偏差系统方程为:
$ \left\{\begin{array}{l} \dot{\tilde{x}}_1=\tilde{x}_2-l_1 \operatorname{sgn}\left(\tilde{x}_1\right) \\ \dot{\tilde{x}}_2=-a \tilde{x}_2-b \tilde{x}_1-l_2 \operatorname{sgn}\left(\tilde{x}_1\right)-k \tilde{T}_{\mathrm{d}} \end{array}\right. $
(9) 式中:$ \tilde{T}_{\mathrm{d}}=\hat{T}_{\mathrm{d}}-\tilde{T}_{\mathrm{L}}$为经过观测器补偿后的误差;$ \dot{\tilde{x}}_1$表示$ \tilde{x}$的微分;$ \dot{\tilde{x}}_2$表示$ \tilde{x}_2$的微分。考虑到要使滑模观测器的状态量在有限时间内收敛到零,取非奇异终端滑模面为:
$ S=\dot{\tilde{x}}_1+\alpha \tilde{x}_1+\beta \tilde{x}_1{ }^{\frac{q}{p}} $
(10) 式中:α>0,β>0为滑模面增益;p和q为正的奇数,是与收敛时间相关的参数,且p>q。对滑模面S求导得:
$ \begin{aligned} \dot{S}= & \ddot{\tilde{x}}_1+\alpha \dot{\tilde{x}}_1+\beta\left(\frac{q}{p}\right) \tilde{x}_1^{\frac{q-p}{p}} \cdot \dot{\tilde{x}}_1=-a \tilde{x}_2-b \tilde{x}_1- \\ & l_2 \operatorname{sgn}\left(\tilde{x}_1\right)-k \hat{T}_{\mathrm{d}}+\alpha \dot{\tilde{x}}_1+\beta\left(\frac{q}{p}\right) \tilde{x}_1^{\frac{q-p}{p}} \cdot \dot{\tilde{x}}_1(11) \end{aligned} $
(11) 式中:$ \ddot{\tilde{x}}_1$表示$ \dot{\tilde{x}}_1$的微分,选取指数趋近律:
$ \dot{S}=-k_{\mathrm{c}} S-\eta \operatorname{sgn}(S) $
(12) 式中:kc>0为滑模收敛率; η>0为切换增益。设计终端滑模观测器观测量为:
$ \begin{gathered} \hat{T}_{\mathrm{d}}=\frac{1}{k}\left[-a \tilde{x}_2-b \tilde{x}_1-l_2 \operatorname{sgn}\left(\tilde{x}_1\right)+\alpha \dot{\tilde{x}}_1+\right. \\ \left.\beta\left(\frac{q}{p}\right) \tilde{x}_1^{\frac{q-p}{p}} \cdot \dot{\tilde{x}}_1+k_{\mathrm{c}} S+\eta \operatorname{sgn}(S)\right] \end{gathered} $
(13) 为了减少指数趋近律中符号函数sgn(S)引起的滑模抖振,设计一种新型趋近律:
$ \left\{\begin{array}{l} \dot{S}=-k_{\mathrm{c}} S-\frac{\eta}{\varphi(S)} \operatorname{sgn}(S) \\ \varphi(S)=\frac{1}{\sqrt{2 \pi \sigma}} \exp \left[-\left(\frac{\sigma}{2}\right)^2 S^2\right]+\mu \end{array}\right. $
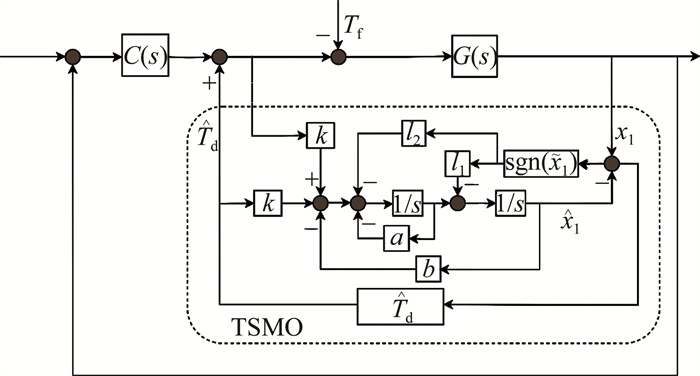
(14) 式中:φ(S)表示以S为自变量的函数; σ和μ为可调参数。使用终端滑模观测器对系统进行补偿的结构图如图 6所示。
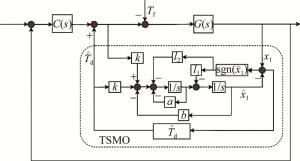
图 6 单个终端滑模观测器补偿结构图
Figure 6. Compensation structure diagram of single TSMO
为了证明滑模观测器的稳定性,构造李雅普诺夫函数V=0.5S2。对V求导可得:
$ \begin{aligned} \dot{V}=S \dot{S} & =S\left[-k_{\mathrm{c}} S-\frac{\eta}{\varphi(S)} \operatorname{sgn}(S)\right]= \\ & -k_{\mathrm{c}} S^2-\frac{\eta}{\varphi(S)} S \operatorname{sgn}(S) \end{aligned} $
(15) 因为kc>0,所以-kcS2≤0,得到如下公式:
$ \dot{V} \leqslant-\frac{|S| \eta}{\varphi(S)} $
(16) 又因为η>0,φ(S)>0,所以$ \dot{V}$≤0,由李雅普诺夫稳定性理论可知,系统渐进稳定,当采样时间t→∞时,S→0,说明系统能保证位置跟踪误差收敛到滑模面。
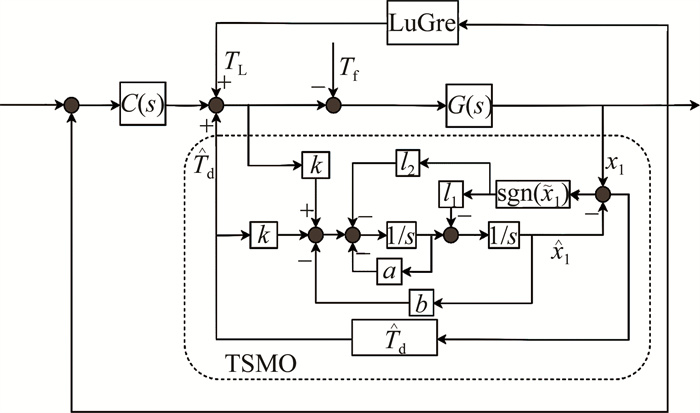
由于摩擦力复杂多变的原因,会使模型辨识存在较大的误差,无法完成摩擦力准确补偿,易引起过补偿和欠补偿的现象。因此还需要对LuGre摩擦模型未完全补偿的系统摩擦进行2次补偿,综合考虑后选择终端滑模观测器。如果能够合理地设计摩擦补偿策略,有效结合基于摩擦模型和终端滑模观测器的方法,不仅能够抑制残余摩擦,还能抑制系统所受的其它扰动,可进一步提升系统的干扰抑制能力和跟踪精度。图 7为LuGre模型和终端滑模观测器融合补偿结构图。
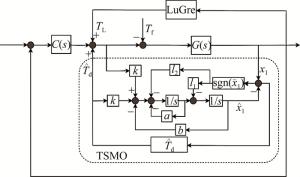
图 7 LuGre模型和终端滑模观测器融合补偿结构图
Figure 7. Fusion compensation structure diagram of LuGre-TSMO
-
为了评估本文中提出的摩擦补偿方法的表现,建立了系统仿真模型。以辨识的摩擦Tf作为系统摩擦扰动来源,给定速度参考ω=5sint,对比仿真无补偿、单独LuGre模型方法、单独TSMO方法以及LuGre-TSMO方法补偿的补偿效果。仿真中,终端滑模观测器参数如表 2所示,仿真步长设置为0.001 s。仿真结果分别如图 8~图 10所示。
表 2 终端滑模观测器采用的参数值
Table 2. Parameter values adopted by the TSMO
parameter a b l1 l2 kc δ α k β η μ p q value 321.64 2368.54 0.01 0.001 900 0.05 200 37896.73 40 10 0.2 9 5 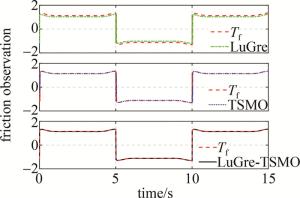
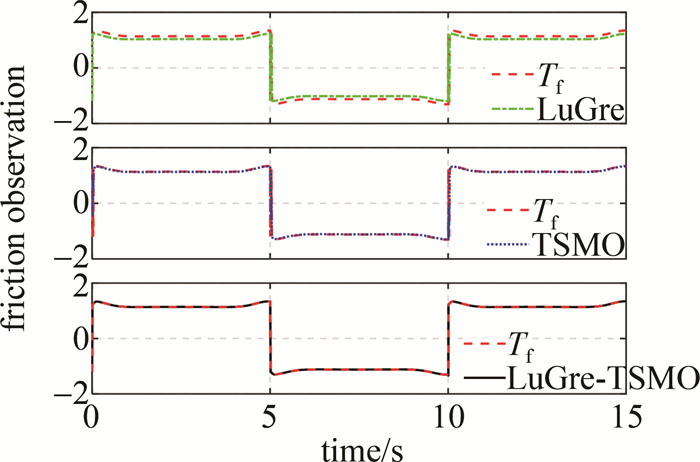
图 8 不同方法摩擦估计补偿量对比图
Figure 8. Comparison of friction estimation compensation of different methods
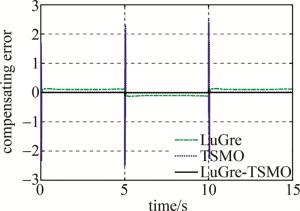
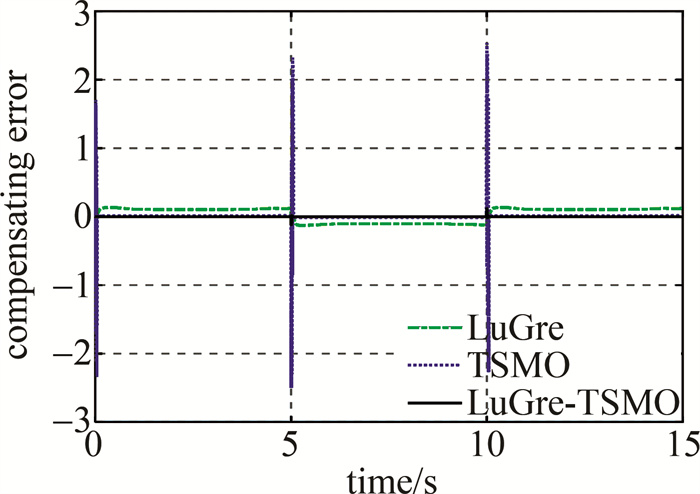
图 9 补偿估计误差对比图
Figure 9. Comparison chart of compensation estimate error
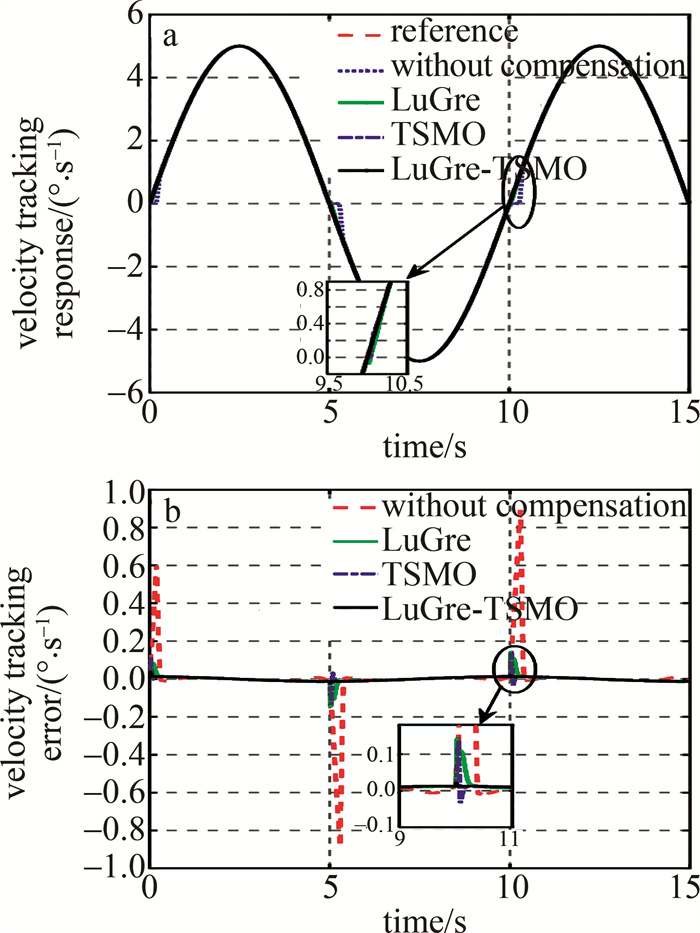
图 8为LuGre模型方法、TSMO方法、LuGre-TSMO方法分别产生的摩擦估计量与系统摩擦的对比图。从图 8可以看出,LuGre-TSMO方法产生的摩擦估计量与系统摩擦贴切度高于另外两种方法,说明在3种补偿方法中,LuGre-TSMO方法测得摩擦力矩更为准确。图 9为摩擦补偿估计误差。从图 9可以看到,LuGre-TSMO方法的摩擦估计误差为黑色直线,曲线波动更小,说明其对系统摩擦的补偿能力最强。图 10为速度跟踪响应和速度跟踪误差对比图。从图 10a可以看出,系统未补偿、LuGre模型方法补偿、TSMO方法补偿和LuGre-TSMO方法补偿,这4条曲线对比,采用LuGre-TSMO方法对系统进行摩擦补偿,速度过零时几乎不存在曲线变形现象;从图 10b可以明显看出,采用LuGre-TSMO方法时速度跟踪误差均值最小,说明该方法能够减小掉头误差和提升速度跟踪能力最强。

图 10 速度跟踪响应和速度跟踪误差同其它方法对比图
Figure 10. Speed tracking response and speed tracking error compared with other methods
-
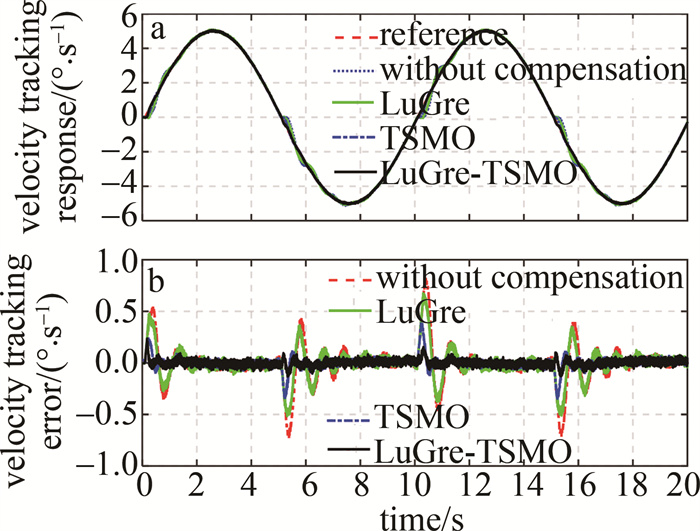
为了进一步验证LuGre-TSMO方法实际应用效果,在单侧支撑水平式跟踪实验平台进行实验验证。给定频率值分别为0.05 Hz、0.1 Hz、0.15 Hz、0.2 Hz和幅值为5的正弦信号,分别使用LuGre模型方法、TSMO方法、LuGre-TSMO方法进行实验,实验结果的速度跟踪响应图和速度跟踪误差图如图 11~图 14所示。
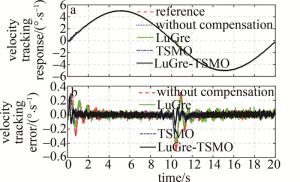
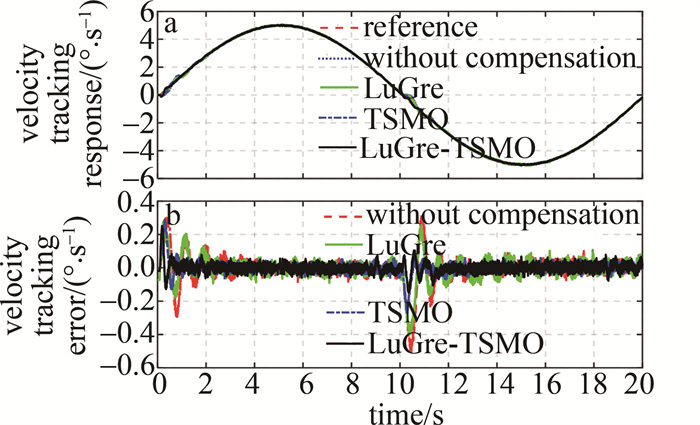
图 11 频率为0.05 Hz时速度跟踪响应和速度跟踪误差不同方法对比图
Figure 11. Comparison of different methods of speed tracking response and speed tracking error at a frequency of 0.05 Hz
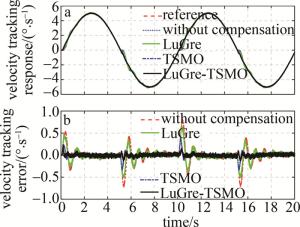
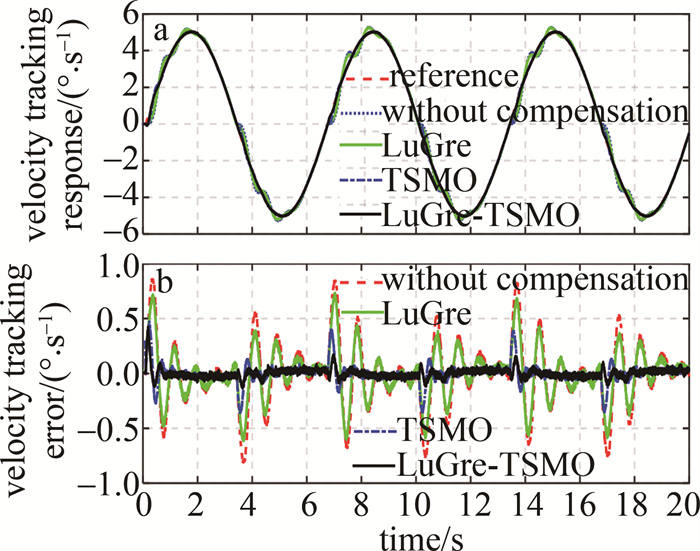
图 12 频率为0.1 Hz时,速度跟踪响应和速度跟踪误差同其它方法对比图
Figure 12. Comparison of velocity tracking response and velocity tracking error with other methods at a frequency of 0.1Hz
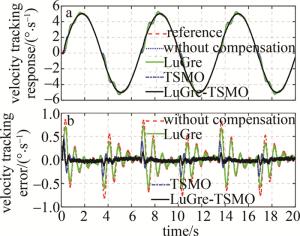
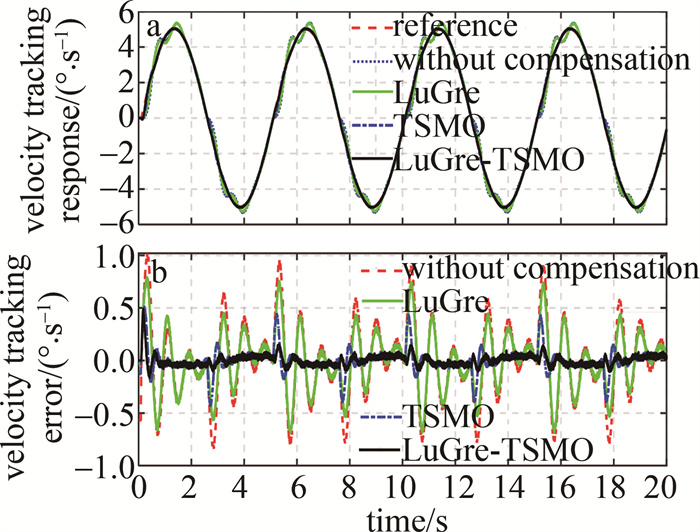
图 13 频率为0.15 Hz时,速度跟踪响应和速度跟踪误差同其它方法对比图
Figure 13. Speed tracking response and speed tracking error compared with other methods at a frequency of 0.15 Hz

图 14 频率为0.2 Hz时,速度跟踪响应和速度跟踪误差同其它方法对比图
Figure 14. Comparison of velocity tracking response and velocity tracking error with other methods at a frequency of 0.2 Hz
图 11是给定正弦信号频率为0.05 Hz、幅值为5的速度跟踪响应和速度跟踪误差不同方法对比图。从图 11中可以看出,未补偿的变化曲线存在明显波形失真。加入LuGre模型方法补偿后,速度跟踪误差略有减小;加入TSMO方法,速度误差进一步减小;使用本文作者提出的LuGre-TSMO方法时,换向时刻存在更小的速度波动,跟踪性能相对最优。图 12、图 13和图 14是频率分别为0.1 Hz、0.15 Hz和0.2 Hz时的结果。与0.05 Hz时跟踪结果一致,相比于LuGre模型方法、TSMO方法,LuGre-TSMO方法获得了最小的跟踪误差,跟踪效果最好。证明了LuGre-TSMO方法在光电跟踪系统中可行且有效。
为了定量描述LuGre-TSMO方法的优势,表 3和表 4中分别统计了速度跟踪误差峰峰值和速度跟踪误差均方根值。从表 3可以看出,在同一频率下,通过LuGre模型方法、TSMO方法、LuGre-TSMO方法3种不同方法得到的速度跟踪误差峰峰值以此减小,其中LuGre-TSMO方法的值最小,说明其补偿效果最好。表 5中进一步补充了相对于摩擦未补偿情况。采用不同方法时均方根误差下降百分比,可以看到,均方根误差最小平均降低了20.88%,最大平均降低了65.12%。证明了LuGre-TSMO方法跟踪性能最优。
表 3 不同方法、不同频率下,速度跟踪误差峰值
Table 3. Error peak values of velocity tracking under different methods and different frequencies
frequency/Hz error peak values/(°·s-1) without compensation LuGre TSMO LuGre-TSMO 0.05 0.8430 0.6850 0.5750 0.4020 0.1 1.5560 1.1900 0.7500 0.3680 0.15 1.7040 1.3500 0.8450 0.5620 0.2 1.8600 1.4790 0.9580 0.6550 表 4 不同方法、不同频率下速度跟踪均方根误差值
Table 4. Root mean square error values of velocity tracking under different methods and different frequencies
frequency/Hz root mean square error/(°·s-1) without compensation LuGre TSMO LuGre-TSMO 0.05 0.0858 0.0685 0.0393 0.0297 0.1 0.1845 0.1437 0.0588 0.0309 0.15 0.2984 0.2302 0.0901 0.0440 0.2 0.3645 0.2866 0.1097 0.0533 表 5 不同方法、不同频率下,速度跟踪误差值与未补偿相比下降百分比
Table 5. Percentage decrease of velocity tracking error value compared with uncompensated value under different methods and different frequencies
frequency/Hz percentage decrease/% LuGre TSMO LuGre-TSMO 0.05 18.74 31.79 52.31 0.1 23.52 51.79 76.35 0.15 20.77 50.41 67.02 0.2 20.48 48.49 64.78 -
以单侧支撑水平式跟踪实验平台为研究对象,将系统所受摩擦力矩扰动作为研究重点,提出了LuGre-TSMO方法。首先在匀速运动情况下使用曲线拟合得到LuGre模型静态参数,再利用改进型粒子群算法拟合,计算出动态参数,实现了摩擦模型前馈补偿。通过采集编码器的位置信息进行速度估计,设计了终端滑模观测器对内外扰动进行估计并再次补偿残余误差及外部扰动。
仿真结果和实验表明,与未补偿情况相比,LuGre模型方法、TSMO方法、LuGre-TSMO方法均方根误差分别降低了20.88%、45.62%、65.12%,数据显示LuGre-TSMO方法对系统掉头误差补偿效果最好,证明了该方法的优越性及实际应用中的可行性。
光电跟踪系统非均匀受力摩擦补偿研究
Research on friction compensation of non-uniform force in photoelectric tracking system
-
摘要: 为了解决光电跟踪系统中摩擦扰动问题、进一步提高视轴稳定精度, 采用了LuGre模型和终端滑模观测器(TSMO)融合的补偿方法(LuGre-TSMO), 即在LuGre模型的基础上设计一种基于新型趋近率的终端滑模观测器实现对系统摩擦的2次补偿。结果表明, 相比于未补偿情况, LuGre-TSMO方法的速度跟踪均方根误差平均下降了65. 38%, 有效提高了实验平台视轴稳定精度; 相比于LuGre模型方法和终端滑模观测器方法, LuGre-TSM0方法摩擦补偿效果最好。该方法在光电跟踪系统中是可行且有效的。Abstract: To mitigate the issue of friction disturbance in the photoelectric tracking system and to improve the stability and precision of the line of sight, a compensation technique known as LuGre-TSMO was employed. The LuGre model was combined with a terminal sliding mode observer (TSMO) in this approach. Specifically, a terminal sliding mode observer was devised based on a novel reaching rate, utilizing the LuGre model as a basis. This design enables the system to achieve secondary compensation for friction. In comparison to the scenario without compensation, the root mean square error of speed tracking was reduced by in average of 65. 38%. Consequently, the accuracy of visual axis stability on the experimental platform was effectively enhanced. The simulation and experimental outcomes demonstrate that the LuGre-TSMO method exhibits the most effective friction compensation effect when compared to the LuGre model method and the terminal sliding mode observer method. Furthermore, it is demonstrated to be both feasible and ffective in the context of the photoelectric tracking system.
-
图 5 单个LuGre模型前馈补偿结构图
Figure 5. Compensation structure diagram of single LuGre model feedforward
图 7 LuGre模型和终端滑模观测器融合补偿结构图
Figure 7. Fusion compensation structure diagram of LuGre-TSMO
图 8 不同方法摩擦估计补偿量对比图
Figure 8. Comparison of friction estimation compensation of different methods
图 10 速度跟踪响应和速度跟踪误差同其它方法对比图
Figure 10. Speed tracking response and speed tracking error compared with other methods
图 11 频率为0.05 Hz时速度跟踪响应和速度跟踪误差不同方法对比图
Figure 11. Comparison of different methods of speed tracking response and speed tracking error at a frequency of 0.05 Hz
图 12 频率为0.1 Hz时,速度跟踪响应和速度跟踪误差同其它方法对比图
Figure 12. Comparison of velocity tracking response and velocity tracking error with other methods at a frequency of 0.1Hz
图 13 频率为0.15 Hz时,速度跟踪响应和速度跟踪误差同其它方法对比图
Figure 13. Speed tracking response and speed tracking error compared with other methods at a frequency of 0.15 Hz
图 14 频率为0.2 Hz时,速度跟踪响应和速度跟踪误差同其它方法对比图
Figure 14. Comparison of velocity tracking response and velocity tracking error with other methods at a frequency of 0.2 Hz
表 1 LuGre摩擦模型参数辨识结果
Table 1. Parameter identification results of LuGre friction model
model parameter identification result TC 50.1416 N·m Ts 61.3567 N·m σ2 0.3514 N·m/rad σ0 5014.16 N·m/rad σ1 100.548 N·m/rad ωS 1.4157 rad/s  下载: 导出CSV
下载: 导出CSV
表 2 终端滑模观测器采用的参数值
Table 2. Parameter values adopted by the TSMO
parameter a b l1 l2 kc δ α k β η μ p q value 321.64 2368.54 0.01 0.001 900 0.05 200 37896.73 40 10 0.2 9 5
下载: 导出CSV
表 3 不同方法、不同频率下,速度跟踪误差峰值
Table 3. Error peak values of velocity tracking under different methods and different frequencies
frequency/Hz error peak values/(°·s-1) without compensation LuGre TSMO LuGre-TSMO 0.05 0.8430 0.6850 0.5750 0.4020 0.1 1.5560 1.1900 0.7500 0.3680 0.15 1.7040 1.3500 0.8450 0.5620 0.2 1.8600 1.4790 0.9580 0.6550
下载: 导出CSV
表 4 不同方法、不同频率下速度跟踪均方根误差值
Table 4. Root mean square error values of velocity tracking under different methods and different frequencies
frequency/Hz root mean square error/(°·s-1) without compensation LuGre TSMO LuGre-TSMO 0.05 0.0858 0.0685 0.0393 0.0297 0.1 0.1845 0.1437 0.0588 0.0309 0.15 0.2984 0.2302 0.0901 0.0440 0.2 0.3645 0.2866 0.1097 0.0533
下载: 导出CSV
表 5 不同方法、不同频率下,速度跟踪误差值与未补偿相比下降百分比
Table 5. Percentage decrease of velocity tracking error value compared with uncompensated value under different methods and different frequencies
frequency/Hz percentage decrease/% LuGre TSMO LuGre-TSMO 0.05 18.74 31.79 52.31 0.1 23.52 51.79 76.35 0.15 20.77 50.41 67.02 0.2 20.48 48.49 64.78
下载: 导出CSV
-
[1] 乔琦, 钟铭亮, 任维, 等. 具有输入饱和的光电伺服平台的滑模控制[J]. 激光技术, 2020, 44(4): 429-435. doi: 10.7510/jgjs.issn.1001-3806.2020.04.006 QIAO Q, ZHONG M L, REN W, et al. Sliding mode control of photoelectric servo platforms with input saturation[J]. LaserTechnology, 2020, 44(4): 429-435(in Chinese). doi: 10.7510/jgjs.issn.1001-3806.2020.04.006 [2] 张良总, 杨涛, 吴云, 等. 基于图像测量的Stewart平台双阶控制技术[J]. 光电工程, 2022, 49(8): 220019. ZHANG L Z, YANG T, WU Y, et al. Two-stage control technology of Stewart platform based on image measurement[J]. Opto-Electronic Engineering, 2022, 49(8): 220019(in Chinese). [3] 夏文强, 何秋农, 段倩文, 等. 基于传感器优化与鲁棒预测的等效加速度前馈[J]. 光电工程, 2021, 48(11): 210153. XIA W Q, HE Q N, DUAN Q W, et al. Equivalent acceleration feedforward based on sensor optimization and robust prediction[J]. Opto-Electronic Engineering, 2021, 48(11): 210153(in Chinese). [4] 唐涛, 马佳光, 陈洪斌, 等. 光电跟踪系统中精密控制技术研究进展[J]. 光电工程, 2020, 47(10): 200315. TANG T, MA J G, CHEN H B, et al. Research progress of precision control technology in p-hotoelectric tracking system[J]. Opto-Electronic Engineering, 2020, 47(10): 200315(in Chinese). [5] 李贤涛, 张葆, 沈宏海. 基于自抗扰控制技术提高航空光电稳定平台的扰动隔离度[J]. 光学精密工程, 2014, 22(8): 2223-2231. LI X T, ZHANG B, SHEN H H. The disturbance isolation degree of the aircraft optoelectro-nic stabilization platform is improved based on the active disturbance rejection control tech-nology[J]. Optics and Precision Engineering, 2014, 22(8): 2223-2231(in Chinese). [6] 李志俊, 毛耀, 亓波, 等. 量子光通信中位置修正单检测控制方法[J]. 光电工程, 2022, 49(3): 210311. LI Zh J, MAO Y, QI B, et al. Position correction single detection control method in quantum optical communication[J]. Opto-Electronic Engineering, 2022, 49(3): 210311(in Chinese). [7] LI Z Q, ZHOU Q K, ZHANG Z Y, et al. Prestiction friction compensation in direct-drive mechatronics systems[J]. Journal of Central South University, 2013, 20(11): 3031-3041. doi: 10.1007/s11771-013-1826-y [8] 王玉, 边启慧, 廖军, 等. 惯性稳定万向架中基于SBG惯导的捷联控制技术[J]. 光电工程, 2023, 50(5): 22023. WANG Y, BIAN Q H, LIAN J, et al. Strapdown control technology based on SBG inertial navigation in inertial stabilized gimbal[J]. Opto-Electronic Engineering, 2023, 50(5): 22023(in Chinese). [9] 任彦, 刘正华, 周锐. 滑模干扰观测器在低速光电跟踪系统中的应用[J]. 北京航空航天大学学报, 2013, 39(6): 835-840. REN Y, LIU Zh H, ZHOU R. Application of sliding mode interference observer in low speed photoelectric tracking system[J]. Journal of Beihang University, 2013, 39(6): 835-840(in Chinese). [10] 王正玺, 张葆, 李贤涛, 等. 航空光电稳定平台高性能摩擦力补偿方案[J]. 航空学报, 2017, 38(12): 277-284. WANG Zh X, ZHANG B, LI X T, et al. High performance friction compensation scheme for aircraft optoelectronic stabilization platform[J]. Actaaeronautica, 2017, 38(12): 277-284(in Chinese). [11] 张嘉峰. 机械伺服系统非线性摩擦补偿自适应控制[D]. 西安: 西安电子科技大学, 2021: 3-7. ZHANG J F. Adaptive control of nonlinear friction compensation for mechanical servo syste-m[D]. Xi'an: Xidian University, 2021: 3-7(in Chinese). [12] 牛建军, 付永领, 刘和松. 高精确度飞行仿真转台内框控制摩擦补偿研究[J]. 电机与控制学报, 2008, 12(5): 576-579. NIU J J, FU Y L, LIU H S. Research on friction compensation of inner frame control of high precision flight simulation turntable[J]. Journal of Electric Machines and Control, 2008, 12(5): 576-579(in Chinese). [13] 张丹. 含摩擦环节伺服系统的补偿控制[D]. 西安: 西安电子科技大学, 2008: 17-26. ZHANG D. Compensation control of servo system with friction link[D]. Xi'an: Xidian University, 2008: 17-26(in Chinese). [14] YUE F, LI X. Robust adaptive integral backstepping control for opto-electronic tracking system based on modified lugre friction model[J]. ISA Transactions, 2018, 80: 312-321. doi: 10.1016/j.isatra.2018.07.016 [15] FRIEDLAND B, PARK Y J. On adaptive friction compensation[J]. IEEE Transactions on Automatic Control, 1992, 37(10): 1609-1612. doi: 10.1109/9.256395 [16] ARMSTRONGHELOUVRY B, DUPONT P, DEWIT C. A survey of models, analysis tools and compensation methods for the control of machines with friction[J]. Automatica, 1994, 30(7): 1083-1138. doi: 10.1016/0005-1098(94)90209-7 [17] POSA M, TOBENKIN M, TEDRAKE R. Stability analysis and control of rigid-body systems with impacts and friction[J]. IEEE Transactions On Automatic Control, 2016, 61(6): 1423-1437. doi: 10.1109/TAC.2015.2459151 [18] 赵威, 任雪梅. 含摩擦的双电机伺服系统快速终端滑模控制[J]. 哈尔滨工业大学学报, 2014, 46(3): 119-123. ZHAO W, REN X M. Fast terminal sliding mode control of dual motor servo system with friction[J]. Journal of Harbin Institute of Technology, 2014, 46(3): 119-123(in Chinese). [19] 陈晓刚, 蔡猛, 戴宁. 基于DOB观测器的机载光电稳定平台扰动抑制方法[J]. 电光与控制, 2020, 27(1): 98-101. CHEN X G, CAI M, DAI N. Disturbance suppression method of airborne optoelectronic sta-ble platform based on DOB observer[J]. Electric Light and Control, 2020, 27(1): 98-101(in Chinese). [20] 于洋, 张红刚, 高军科, 等. 光电平台角位置信息摩擦观测补偿技术[J]. 红外与激光工程, 2022, 51(5): 20210557. YU Y, ZHANG H G, GAO J K, et al. Friction observation compensation technology for opti-cal level station angle and position information[J]. Infrared and Laser Engineering, 2022, 51(5): 20210557(in Chinese). [21] DENG Y, WANG J, LI H, et al. Adaptive sliding mode current control with sliding modedisturbance observer for pmsm drives[J]. ISA Transactions, 2019, 88: 113-126. doi: 10.1016/j.isatra.2018.11.039 [22] 董丽荣, 任彦, 王义敏. FTASMC在光电跟踪系统中的应用[J]. 中国测试, 2023, 49(10): 71-76. DONG L R, REN Y, WANG Y M. Application of FTASMC in photoelectric tracking system[J]. China Measurement & Test, 2023, 49(10): 71-76(in Chinese). [23] YU X, KAYNAK O. Sliding-mode control with soft computing: A survey[J]. IEEE Transactions on Industrial Electronics, 2009, 56(9): 3275-3285. doi: 10.1109/TIE.2009.2027531 [24] ZHANG X. Robust integral sliding mode control strategy under designed switching rules for uncertain switched linear systems via multiple lyapunov functions[J]. Transactions of the Institute of Measurement and Control, 2019, 41(12): 3536-3549. doi: 10.1177/0142331219832947 [25] XU Y, WU A, ZHU Q, et al. Observer-based sliding mode control for flexible spacecraft with external disturbance[J]. IEEE Access, 2020, 8: 32477-32484. doi: 10.1109/ACCESS.2020.2973657 [26] ZHANG B, NIE K, CHEN X, et al. Development of sliding mode controller based on inter-nal model controller for higher precision electro-optical tracking system[J]. Actuators, 2022, 11(1): 16. doi: 10.3390/act11010016 [27] GONG C, HU Y, GAO J, et al. An improved delay-suppressed sliding-mode observer for sen-sorless vector-controlled pmsm[J]. IEEE Transactions on Industrial Electronics, 2020, 67(7): 5913-5923. doi: 10.1109/TIE.2019.2952824 [28] JIANG J, ZHOU X, ZHAO W, et al. A fast integral sliding mode controller with an extended state observer for position control of permanent magnet synchronous motor servo systems[J]. Frontiers of Information Technology & Electronic Engineering, 2020, 21(8): 1239-1250. [29] 周倩, 张兵, 李志俊, 等. 光电跟踪系统的区间2型模糊滑模控制方法[J]. 激光技术, 2023, 47(3): 293-300. doi: 10.7510/jgjs.issn.1001-3806.2023.03.001 ZHOU Q, ZHANG B, LI Zh J, et al. Interval type-2 fuzzy sliding mode control method of electro-optical tracking system[J]. Laser Technology, 2023, 47(3): 293-300(in Chinese). doi: 10.7510/jgjs.issn.1001-3806.2023.03.001 [30] WANG Y, CAO L, ZHANG Sh, et al. Command filtered adaptive fuzzy backstepping control method of uncertain non-linear systems[J]. IET Control Theory & Applications, 2016, 10(10): 1134-1141. [31] 薛进学, 郭清远, 张丰收. 基于LuGre摩擦模型前馈补偿的模糊PID控制系统设计[J]. 现代制造工程, 2020(1): 136-142. XUE J X, GUO Q Y, ZHANG F Sh. Design of fuzzy PID control system based on feedforward compensationof the LuGre friction model[J]. Modern Manufacturing Engineering, 2020(1): 136-142(in Chinese). [32] 张文轩, 王栋. 两轴两框架机载光电系统摩擦模型辨识的研究[J]. 光学与光电技术, 2023, 21(2): 144-151. ZHANG W X, WANG D. Research on friction model identification of two-axis two-frame airborne photoelectric system[J]. Optics and Photoelectric Technology, 2023, 21(2): 144-151(in Chinese). [33] 李明, 封航, 李莹月. 基于改进遗传算法的LuGre摩擦模型参数辨识及补偿[J]. 组合机床与自动化加工技术, 2018(11): 38-42. LI M, FENG H, LI Y Y. Parameter identification and compensation of LuGre friction model based on improved genetic algorithm[J]. Combined Machine Tools and Automated Processing Technology, 2018(11): 38-42(in Chinese). [34] de WIT C C, OLSSON H, ASTROM K J, et al. A new model for control of systems with friction[J]. IEEE Transactions on Automatic Control, 1995, 40(3): 419-425. doi: 10.1109/9.376053 [35] XUE T, LI R, TOKGO M, et al. Trajectory planning for autonomous mobile robot using a hybrid improved qpso algorithm[J]. Soft Computing, 2017, 21(9): 2421-2437. doi: 10.1007/s00500-015-1956-2 [36] 王元超. 机载三轴通用光电稳定平台自适应滑模控制方法研究[D]. 长春: 中国科学院长春光学精密机械与物理研究所, 2021: 37-44. WANG Y Ch. Research on adaptive sliding mode control methods for an airborne three-axis universal electro-optical stabilized platform[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2021: 37-44(in Chinese). -

 点击查看大图
点击查看大图
计量
- 文章访问数: 3254
- HTML全文浏览量: 781
- PDF下载量: 39
- 被引次数: 0
