 网站地图
网站地图



-
历史建筑是人类文明的重要组成部分,是全世界共同的珍贵财富,开展历史建筑的保护工作对于维护文化遗产和社会稳定有着重要意义。近年来,中共中央办公厅和国务院办公厅采取了一系列措施,以促进历史文化的传承和保护。2021年,中央政府颁布了《关于在城乡建设中加强历史文化保护传承的意见》[1],期望通过深入的调查、考察、研究以及科学的管理,来确保历史建筑的长期安全和完整,并以此来实现其可持续发展。因此,如何精准、快速地恢复这些历史建筑以及将它们的历史记录永久性地保留,成为当务之急。而重现历史建筑的关键,在于精确而完整地测量它们的结构和特征。
云南大理白族自治州存在大量历史建筑,传统风貌和历史色彩明显,但传统建筑损坏现象居多,需要保护和治理[2-3]。为了保护历史建筑不被破坏,许多学者针对历史建筑的现状做了大量研究[4-5]。基于此,本文作者通过研究近年来历史建筑保护的方法,发现了目前历史建筑保护的问题与不足,进而探讨3维激光技术在历史建筑保护中的应用。
-
目前,历史建筑物保护手段主要有手工量测、全站仪测量、无人机倾斜摄影、3维激光扫描仪等方法。传统手工测量和全站仪测量精度不高,不易通视,效率低,费时费力,无法准确确定建筑结构[6]。历史建筑具有高度不均、结构复杂和多重功能的特点,采用无人机倾斜摄影只能获取建筑上方结构和建筑外立面的纹理信息,无法获得建筑物内部结构[7]。3维激光扫描可以对建筑物内部和外部都能扫描到[8]。3维激光扫描测量技术是一种非常先进的测量手段,它能够快速、准确地测量建筑物的位置和形状,并能够应对各种复杂的环境[9]。通过3维激光扫描获取点云和全景图像,对点云和图像处理后可以获得具有地理坐标的拼接点云数据、平面图、立面图和剖面图,达到“多测合一”的目的[10]。由于单种方法都存在着一定的问题,于是有学者将摄影测量与3维激光扫描结合,即空地一体[11-12],但这种方法在禁飞区却难以进行数据采集。
传统的设站式3维激光扫描技术在实际运用过程中遇到了诸多问题,比如它只能在一定范围内进行点云扫描,转点处通过设置标靶以便进行后期的点云拼接,在复杂建筑物周围的环境中难以实现准确定位,也会存在很多干扰因素,从而对测量精度产生影响,也易受到噪声和错误坐标的影响[13],虽然其精度高,但是效率偏低,灵活度不足。1988年,CHEESEMAN等人首次将即时定位与地图构建(simultaneous localization and mapping,SLAM)引入美国电气和电子工程师协会(Institute of Electrical and Electronics Engineers,IEEE)机器人与自动化会议,这一前所未有的技术,不仅改变了当前的同步定位和地图构建方式,而且还极大地促进了该领域的发展,其成果不仅仅体现在CHEESEMAN的研究中,同时还得到了广泛的应用,对于该领域的发展起到了至关重要的作用[14-15]。通过使用先进的传感技术,可以实现对物体的精确定位,并通过数据采集、分析、处理等多个步骤,将所获取的数据转换为具有可视化特征的高精度地图,从而为用户提供更加准确的地理服务。与以往的测量手段相比较,SLAM摆脱了对全球定位系统(global positioning system,GPS)信号的依赖,可以在地下、巷道、室内等复杂场景作业[16-17],实现高效的3维数据获取。
随着研究的不断深入,3-D激光雷达的SLAM算法得到了迅猛的发展[18],手持SLAM激光扫描仪便是一个很好的例子。表 1是手持SLAM 3维激光扫描仪与传统设站式3维激光扫描仪的对比。
表 1 常见建筑保护方法对比
Table 1. Comparison of common building preservation methods
traditional surveying and mapping means oblique photograph station based 3-D laser scanning SLAM handheld scanning performance low high medium high precision low high high medium dexterity low high low high range little external texture internal and external texture internal and external texture time slow fast medium fast price low high high medium SLAM手持3维激光扫描仪体积小、重量轻、便捷化程度高,内置惯导,在扫描数据的同时,仪器根据内置的惯导模块对激光点云数据进行同步拼接,效率更高,数据精度有保障。SLAM 3维激光扫描技术对历史建筑内部复杂结构数据采集有更加明显的优势,同步采集的图像数据能同时获取历史建筑墙壁上的壁画或其它装饰品,其它传统的方法很难完成。
-
本文中的研究对象是大理白族自治州鹤庆县始建于1926年的历史建筑。该建筑为两层四合院院落,占地面积536.47 m2,建筑面积1072.94 m2,椽子采用原状圆形椽,墙体为夯土墙及土坯墙砌体,简板瓦件为原状瓦件,局部更换为新瓦,三坊建筑均建筑为骑厦楼。一、二层天棚采用复合板斜顶结构,院落门窗均为原状门窗,近期采用土红色涂料装饰,主墙以草筋石灰墙面为主,局部有脱落现象,院心地面则采用六角砖地幔作为装饰。整体院落保存完好。
-
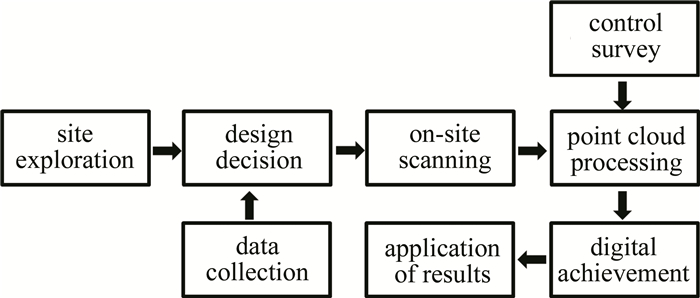
首先,使用手持SLAM 3维激光扫描仪采集点云数据和图像数据;其次,运用SLAM软件对采集的数据进行预处理和分析;然后,结合历史建筑学知识对采集的3维空间数据进行建模和重建等数字化处理;最后,绘制平立剖面图。通过本次使用的手持SLAM 3维激光扫描仪对历史建筑进行扫描的工作经验,总结了技术流程图,如图 1所示。
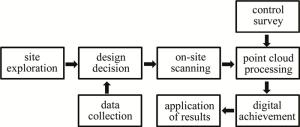
图 1 技术流程图
Figure 1. Technique flow chart
-
在扫描测量前应先进行现场踏勘,了解建筑物周围的环境,并绘制建筑物结构草图与拍摄建筑物细节照片。为了更好地了解历史建筑,将搜集有关它们的信息,包括但不限于:建筑的名字、位置、年份、类别、独特的价值、发展历程、重大事件、著名人物、重要元素、当前的功能、结构形式、楼层数量、建筑面积、占地面积、影响因素(包括自然环境和人为干扰)、所有权归属、拥有者、使用者以及拥有者的信息。
-
手持SLAM 3维激光扫描仪内置惯导系统,设计扫描路线时,要尽可能使路线闭合,同时也要减少路线的交叉。扫描路线见图 2所示。图 2中有一条彩色的线条即为扫描路线,路线起点从蓝色开始,扫描时间越长,颜色就越会向红色靠近。

图 2 扫描路线图
Figure 2. Scan the roadmap
-
现场扫描使用的手持SLAM 3维激光扫描仪的扫描视场角为280°×360°,测量范围100 m,测距误差±0.03 m,最大扫描频率300000点/s。通过手持SLAM 3维激光扫描仪,获取历史建筑的点云数据和图像数据,对数据进行后期处理,可以得到具有丰富颜色信息的点云图像,让扫描仪的精确性和细节得到充分的体现[19]。在扫描过程中,首先要确定控制点,然后把扫描仪打点器的十字丝对准控制点,并且保持它的位置稳定。在扫描仪扫描结束后,再利用实时动态定位技术(real time kinematic,RTK)来获取控制点的绝对坐标。
-
在开始点云处理之前,必须先进行去噪、平滑等步骤,以减少扫描仪带来的噪声数据,同时也能够有效地消除点云中的重叠部分和缺失部分。接着,将经过预处理的点云数据输入SLAM软件,即可获得清晰的点云模型,同时也能够清楚地显示出扫描路径,此外,这些点云数据也能够被转换成RGB真彩色,从而让整个建筑效果图变得更加逼真。经过对从点云中量测的控制点坐标与RTK实测的控制点坐标进行对比,可以更加清楚地了解点云模型的精度。
-
基于手持SLAM 3维激光扫描仪所采集的点云数据,可以实现对历史建筑的全方位立体数字化。通过数字化的手段,可以更直观地理解历史建筑的空间形态特征,进而对其进行保护修复工作。
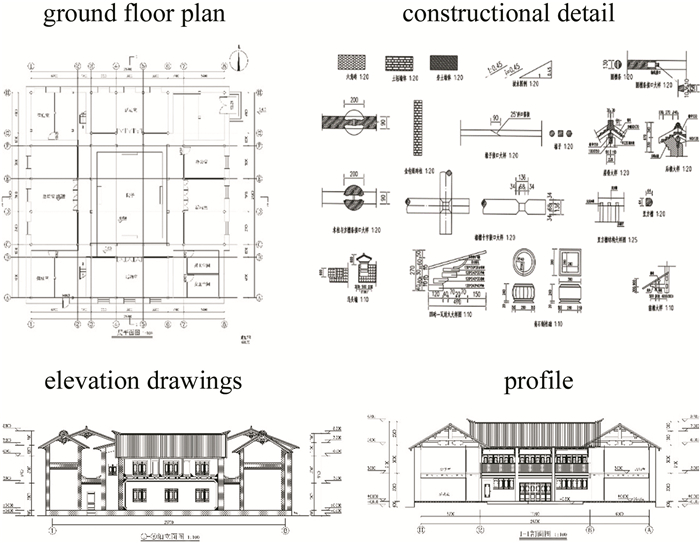
(a) 通过点云处理软件,将点云模型导入,并根据绘图区域进行精确的分割和切割;(b)将切好片的点云模型转换成计算机辅助设计软件可以识别的格式(如.rcs),导入计算机辅助设计软件中,如图 3所示,利用计算机辅助设计软件内置的比例尺或坐标,对切片模型进行平移和缩放,作为绘制平立剖面图的底图;(c)结合现场照片和手持SLAM扫描仪上方的全景相机作为细节参考,根据底图进行绘制平立剖面图;(d)进行有关构造详图的绘制,绘制的目的是为了表现出各个部件之间的相互关系、位置和工作原理及详细参数,以便进行设计、制造、维修等工作,由于部件很小,所以会采用1 ∶1,1 ∶2,1 ∶5,1 ∶10,1 ∶20的比例尺进行绘制;(e)绘制完成后应对尺寸进行精确地标注以及符号标注等,并在现场进行严格的校验,以确保符合编号要求,然后再添加图框、比例尺等元素,如图 4所示。
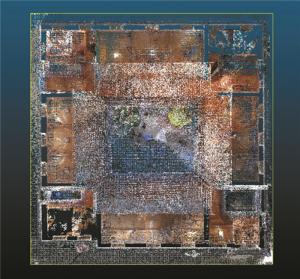
图 3 点云模型
Figure 3. Point cloud model
图 4 成果图
Figure 4. Results graph
-
在点云模型中对建筑物耳房的长、宽和建筑物整体的长、宽等4条边进行多次测量,求取平均值,然后用钢尺或激光测距仪在实地也进行多次测量,求取平均值,再计算差值,详细数据见表 2。表中,JCB表示检查边。
表 2 点云模型中测量数据与实际测量数据的统计比较表
Table 2. Statistical comparison table of the measured data and actual measurement data in a point cloud model
JCB 1 JCB 2 JCB 3 JCB 4 point cloud data/m 3.145 10.324 10.368 5.777 measured length/m 3.140 10.320 10.370 5.780 difference value/m 0.005 0.004 -0.002 -0.003 从表中的数据可以看出,实测长度和点云测量的长度是有一定的差值的,差值最大为0.005 m,最小为0.002 m,中误差0.004 m,证明使用SLAM手持激光扫描仪去对历史建筑进行扫描获取的点云数据的精度能满足《古建筑测绘规范》[20]的要求。
-
在点云模型中测量历史建筑的天井、柱子、门窗等8个检查点坐标,然后用全站仪在实地测量其坐标,以实测点坐标为基准评定点云精度,实测点坐标与点云测量坐标记录表如表 3所示,坐标精度偏差如表 4所示。表中,JCD表示检查点;*涉及国家具体点位信息。
表 3 实测点坐标与点云测量点坐标记录表
Table 3. Record table of measured point coordinates and point cloud measurement point coordinates
number measured point point cloud measurement point X/m Y/m Z/m X/m Y/m Z/m JCD 1 **771.332 **124.633 **64.562 **771.335 **124.600 **64.570 JCD 2 **770.823 **113.929 **64.535 **770.814 **113.897 **64.529 JCD 3 **770.709 **121.507 **64.551 **770.695 **121.484 **64.591 JCD 4 **770.470 **117.142 **64.552 **770.475 **117.140 **64.570 JCD 5 **781.303 **123.030 **67.673 **781.348 **123.005 **67.682 JCD 6 **781.199 **120.848 **67.677 **781.168 **120.826 **67.675 JCD 7 **780.668 **124.203 **64.363 **780.620 **124.182 **64.325 JCD 8 **780.158 **113.485 **64.333 **780.127 **113.465 **64.333 表 4 点云平面与高程坐标误差统计表
Table 4. Point cloud plane and elevation coordinate error statistical table
JCD 1 JCD 2 JCD 3 JCD 4 JCD 5 JCD 6 JCD 7 JCD 8 ΔX/m -0.003 0.009 0.014 -0.005 -0.045 0.031 0.048 0.031 ΔY/m 0.033 0.032 0.023 0.002 0.025 0.022 0.021 0.020 ΔZ/m -0.008 0.006 -0.040 -0.018 -0.009 0.002 0.038 0.000 根据中误差计算公式[21]得到:
$ \left\{\begin{array}{l} \sigma_x= \pm \sqrt{\frac{[\Delta X \Delta X]}{n}}=0.029 \mathrm{~m} \\ \sigma_y= \pm \sqrt{\frac{[\Delta Y \Delta Y]}{n}}=0.024 \mathrm{~m} \\ \sigma_z= \pm \sqrt{\frac{[\Delta Z \Delta Z]}{n}}=0.021 \mathrm{~m} \end{array}\right. $
(1) 式中:ΔX、ΔY和ΔZ分别为检查点的点云坐标与实测检查点的坐标偏差;σ为中误差;n为检查点数量。求得检查点平面位置中误差[21]和高程中误差[21]分别为:
$ \sigma_{x, y}=\sqrt{\sigma_x^2+\sigma_y^2}=0.037 \mathrm{~m} $
(2) $ \sigma_z=\sqrt{\sigma_z^2}=0.021 \mathrm{~m} $
(3) 经过距离误差和点位误差分析结果,证明SLAM 3维激光扫描技术能够提供准确的尺寸信息和坐标信息,满足《古建筑测绘规范》[20]的要求。
-
SLAM 3维激光扫描技术不仅能够快速地获得更加准确的3维数据,还能够快速地完成整个历史建筑数据采集过程并形成高精度点云模型,基于该模型提取的平立剖图能够达到历史建筑保护相关规范精度要求。这种技术大大提升了工作效率,降低了成本,解决了传统手段效率低、耗时耗力;无人机倾斜摄影测量因视角受限、无法拍摄到建筑物内部;传统设站式3维激光扫描仪灵活度低等问题,为历史建筑的保护和传承提供了有力的支撑。
3维激光扫描技术在历史建筑保护中的应用
Application of 3-D laser scanning technology in the preservation of historical buildings
-
摘要: 为了更好地将即时定位与地图构建(SLAM)3维激光扫描技术应用在历史建筑保护中,实现利用3维点云模型对历史建筑进行数字化保护,以云南白族历史建筑为研究对象,采用了SLAM 3维激光扫描技术获取历史建筑高精度点云模型,该技术不仅能快速地完成数据采集工作、提高历史建筑数字化保护工作的效率,还可以形成历史建筑丰富的数字化成果;通过对实验区数据的理论分析和实验验证,证明了SLAM 3维激光扫描技术在历史建筑数字化保护中的可行性。结果表明,距离中误差为0.004 m,点位中误差为0.037 m和0.021 m;SLAM 3维激光扫描技术能够快速、准确地完成历史建筑数据采集过程并形成高精度点云模型,基于该模型提取的平立剖面图能够达到相关规范精度要求。该研究为历史建筑数字化保护提供了一种新的思路和方法,有望在未来的应用中发挥更为积极的作用。Abstract: In order to explore how to better apply the simultaneous localization and mapping (SLAM) 3-D laser scanning technology to the preservation of historical buildings and realize the purpose of digital preservation of historical buildings by using 3-D point cloud models, the historical buildings of the Bai ethnic group in Yunnan were taken as the research object, and SLAM 3-D laser scanning technology was used to obtain high-precision point cloud models of historical buildings. This technology can not only quickly complete the data collection work, improve the efficiency of the digital preservation of historical buildings, but also form rich digital achievements of historical buildings. Through the theoretical analysis and experimental verification of the experimental area data, the feasibility of SLAM 3-D laser scanning technology in the digital protection of historical buildings was proved. The results show that the error in distance is 0.004 m, and the error in point is 0.037 m and 0.021 m, and SLAM 3-D laser scanning technology can not only quickly and accurately complete the historical building data collection process and form a high-precision point cloud model, but also the flat vertical section extracted based on the model can meet the relevant specification accuracy requirements. This study provides a new idea and method for the digital preservation of historic buildings, which is expected to play a more active role in future applications.
-
表 1 常见建筑保护方法对比
Table 1. Comparison of common building preservation methods
traditional surveying and mapping means oblique photograph station based 3-D laser scanning SLAM handheld scanning performance low high medium high precision low high high medium dexterity low high low high range little external texture internal and external texture internal and external texture time slow fast medium fast price low high high medium  下载: 导出CSV
下载: 导出CSV
表 2 点云模型中测量数据与实际测量数据的统计比较表
Table 2. Statistical comparison table of the measured data and actual measurement data in a point cloud model
JCB 1 JCB 2 JCB 3 JCB 4 point cloud data/m 3.145 10.324 10.368 5.777 measured length/m 3.140 10.320 10.370 5.780 difference value/m 0.005 0.004 -0.002 -0.003
下载: 导出CSV
表 3 实测点坐标与点云测量点坐标记录表
Table 3. Record table of measured point coordinates and point cloud measurement point coordinates
number measured point point cloud measurement point X/m Y/m Z/m X/m Y/m Z/m JCD 1 **771.332 **124.633 **64.562 **771.335 **124.600 **64.570 JCD 2 **770.823 **113.929 **64.535 **770.814 **113.897 **64.529 JCD 3 **770.709 **121.507 **64.551 **770.695 **121.484 **64.591 JCD 4 **770.470 **117.142 **64.552 **770.475 **117.140 **64.570 JCD 5 **781.303 **123.030 **67.673 **781.348 **123.005 **67.682 JCD 6 **781.199 **120.848 **67.677 **781.168 **120.826 **67.675 JCD 7 **780.668 **124.203 **64.363 **780.620 **124.182 **64.325 JCD 8 **780.158 **113.485 **64.333 **780.127 **113.465 **64.333
下载: 导出CSV
表 4 点云平面与高程坐标误差统计表
Table 4. Point cloud plane and elevation coordinate error statistical table
JCD 1 JCD 2 JCD 3 JCD 4 JCD 5 JCD 6 JCD 7 JCD 8 ΔX/m -0.003 0.009 0.014 -0.005 -0.045 0.031 0.048 0.031 ΔY/m 0.033 0.032 0.023 0.002 0.025 0.022 0.021 0.020 ΔZ/m -0.008 0.006 -0.040 -0.018 -0.009 0.002 0.038 0.000
下载: 导出CSV
-
-

 点击查看大图
点击查看大图
图(4) / 表(4)
计量
- 文章访问数: 1118
- HTML全文浏览量: 576
- PDF下载量: 18
- 被引次数: 0
