 网站地图
网站地图

-
人体许多疾病会在眼底视网膜上产生相对应的病理变化[1],这些疾病主要包括糖尿病[2-3]、高血压、心脏病等。眼底相关检查能够及早准确地发现各种早期不易发觉的病变,例如视神经炎、青光眼、糖尿病引起的视网膜水肿、黄斑部病变[4]等,医生可以提示患者及时、有效地医治。随着老龄化以及糖尿病人的逐渐增多,采用眼底成像进行眼底病的筛查和检查必将会越来越遍及[5]。
眼底成像包括传统的眼底照相[6]和目前比较前沿的激光扫描超广角共聚焦眼底成像[7]。由于人眼存在不同程度的近视、远视等屈光不正情况,在进行眼底成像时需要通过成像系统内部调焦结构来补偿人眼屈光不正引起的离焦量。如果补偿不准确,拍摄的眼底图像将模糊不清,因此调焦是眼底成像中非常重要的一步[8]。眼底图像在实时预览的情况下细节不够清晰,仅靠目视很难准确判断视网膜的清晰程度,因此需要使用更直观的方法判定眼底图像的清晰度。ZHANG等人[9]采用双光楔裂像调焦技术,激光光源通过一条矩形狭缝投影在视网膜上形成一条矩形视标,操作者依据矩形视标在视网膜上错位关系手动调节离焦量。LI等人[10]设计了一种采用轴锥镜组的光学系统,可通过设置视标,诱导人眼自动调焦。MA等人[11]应用新型自主变焦光学器件——液体透镜作为人眼屈光度补偿元件,通过电压控制变焦实现自动调焦。此外还有一些自动调焦方法,通过电荷耦合器件(charge-coupled device, CCD)相机采集一系列眼底图像,自动判断对焦是否准确,并指导调焦设备实现眼底成像自动调焦。
此前应用在眼底照相中的双光楔调焦技术,是通过人工手动调节旋钮使得屈光补偿镜前后移动实现调焦,这种机械操作的方式实现眼底调焦,主观性较高且精度较差。本文中设计了一种双光楔裂像电控调焦系统,在系统的控制下,电机驱动视度补偿镜和裂像调焦机构关联移动。模拟眼底成像实验表明,该调焦方式可实现±10 m-1屈光度调节,稳定性好且精度高。系统结构体积小,大大节省眼底成像仪器内部空间,可在此基础上发展眼底成像自动调焦技术,研制自动眼底成像仪器。
-
近红外半导体激光光源发出的光线通过双光楔及狭缝(简称双光楔)后形成具有一定角度的、上下分离的两束光线,光线投影成像到视网膜上形成两个矩形视标。这样当人眼为正视眼时两个视标[12-13]会重合;当人眼为近视眼或远视眼时,即存在屈光不正时,两个视标会在视网膜上产生不同方向的错位分离。由视网膜上两个视标分离的距离可以精确计算出人眼的离焦量,从而确定视度补偿镜的运动方向和位置,实现对人眼屈光不正的准确补偿。根据瑞利判据,以矩形视标的一半为精度判断标准,当两条矩形视标错位大小为半个视标宽度时作为最低可调精度。
-
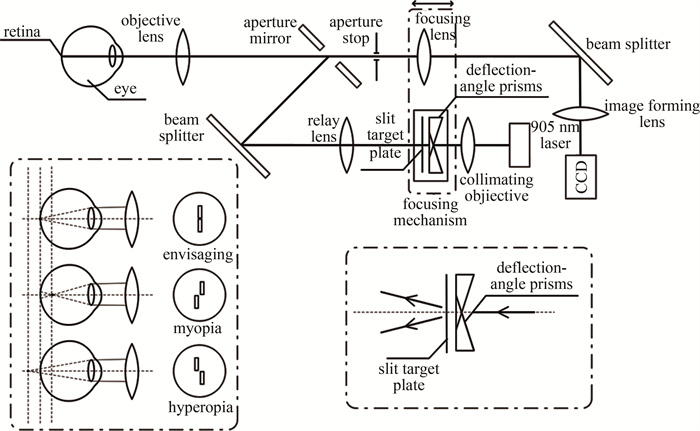
图 1为双光楔裂像调焦光学系统。系统中双光楔模块中的狭缝和人眼视网膜互为共轭面。905 nm近红外半导体激光出射光束经过准直物镜,再经过双光楔时被分离成两束不同方向的光束,最后经过中空反光镜和接目物镜最终进入人眼,在视网膜上形成两条矩形视标。在正视眼情况下,光束在视网膜上聚焦,形成对齐的矩形视标;在近视眼或远视眼情况下,光束聚焦在视网膜前或后,形成分离的矩形视标。
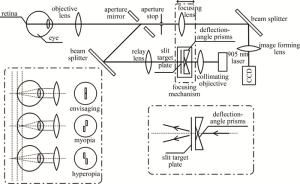
图 1 眼底调焦光学系统
Figure 1. Fundus focusing optical system
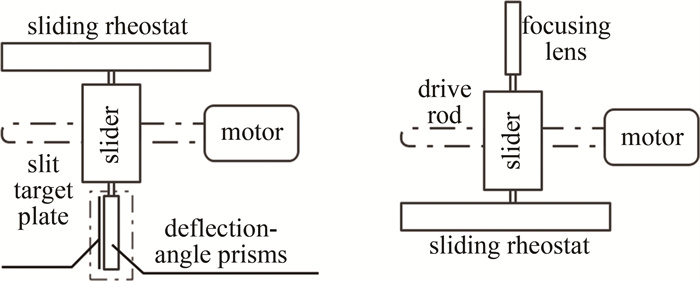
图 2为调焦机构示意图。由两个直流电机、两个滑块、两个滑动变阻器及视度补偿镜、双光楔构成。工作原理为两个电机分别带动一个滑块运动,每个滑块通过抽头柄与滑动变阻器连接,滑块位置代表视度补偿镜和双光楔的位置,通过滑动变阻器的电压值反馈。工作时先判断两条矩形视标位置,根据上下两条矩形视标的错位情况判断需补偿的离焦量,随后由电机带动双光楔和视度补偿镜移动进行离焦补偿。
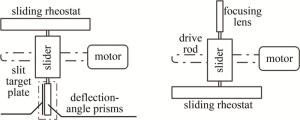
图 2 调焦机构
Figure 2. Focusing mechanism
-
使用STM32F103RCT6芯片(简称微处理器)作为主控芯片。它含有高性能的精简指令运算集(reduced instruction set computer, RISC)内核,运算频率最高可达72 MHz,同时还具备了12位模数转换器、计时器、标准和高级两种通讯接口,且成本低廉,满足本系统的设计需求及后续功能拓展。
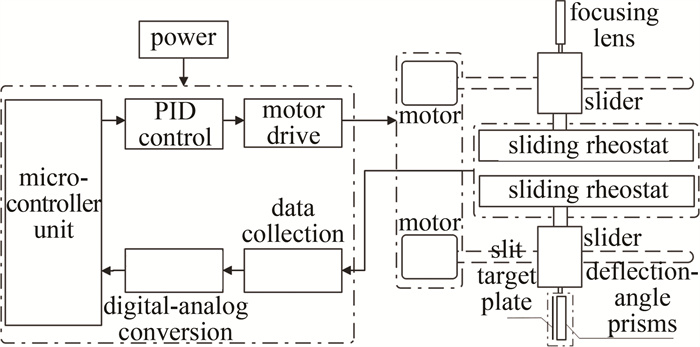
调焦系统控制方案如图 3所示。该系统主要由下列几部分模块组成:电源、位置信息采集、电机驱动、模数转换、比例-积分-微分(proportion-integration-differentiation, PID) 控制算法等模块。
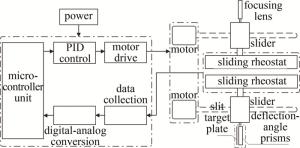
图 3 调焦系统控制方案
Figure 3. Control scheme of focusing system
在调焦过程中,位置信息采集模块将滑动变阻器的阻值转换成相对应的模拟电信号,再经模数转换部分转换成12位精度的数字信号发送给微处理器。微处理器通过算法判断当前双光楔位置,随后进行误差判断,PID模块通过误差指导驱动电机控制双光楔和视度补偿镜移动,微处理器通过反馈的电压值实时判断视度补偿镜是否准确移动到目标位置,以此闭环工作方式来实现精确调焦。
-
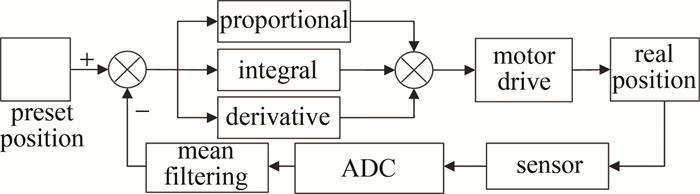
电子控制系统设计的目的是通过闭环反馈视度补偿镜和双光楔位置,从而实现更加精确的调焦,电机控制算法是提高调焦精度的关键。电机控制算法采用闭环PID控制算法,它是目前最成熟的控制算法之一,PID算法[14-15]由比例、积分、微分三部分组成。积分环节的功能是消除静差,所谓静差,就是稳定后输出值同设定值两者的差值;微分环节功能则是根据偏差信号的变化趋势进行超前调节,从而提高调节速度[16]。PID算法离散化表示见下式:
$ \begin{gathered} u(k)=K_{\mathrm{p}} e(k)+K_{\mathrm{i}} \sum\limits_{j=0}^k e(j)+ \\ K_{\mathrm{d}}[e(k)-e(k-1)] \end{gathered} $
(1) 式中:u(k)为当前节点控制器输出量;k为当前计算的节点;Kp为比例系数;Ki为积分时间系数;Kd为微分时间系数;e(·)为偏差,等于给定量和输出量之差。
-
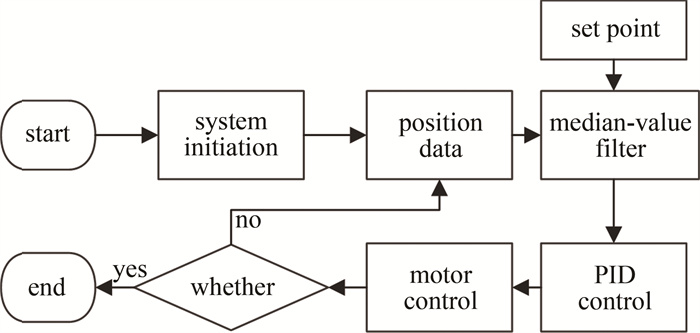
在硬件的基础上,通过Keil5编译环境使用C语言编写控制算法实现功能需求。算法需调用传感器、模数转换两部分,实现将传感器检测到的模拟信号发送给模数转换模块(analog-to-digital converter, ADC),将位置信息转换为数字量信号,再发送给微处理器。PID算法控制流程图见图 4。
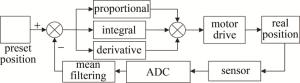
图 4 PID控制流程
Figure 4. PID control process
设定值与反馈值发送给微处理器,微处理器计算误差,通过PID算法控制电机实现闭环控制[17]。比例部分通过反馈信息发送控制信号控制电机转动方向和转动速度;积分部分是用来消除实际位置和设定位置之间的静差;微分部分是根据误差变化趋势对电机转速和方向进行超前调节,从而使视度补偿镜和双光楔快速精确达到目标位置。
信号采集滤波方面,模数转换采用中值平均滤波方案,中值平均滤波法是对采集的N个连续数据,去掉其中的极大值和极小值,对余下的N-2个数据进行算数平均。中值平均滤波方案融合了中值滤波和平均滤波的优点,能有效消除工作中脉冲干扰所引起的采样值偏差。
按照上述方案设计控制程序,利用Keil5软件编写程序并进行编译,通过下载器下载到微处理器中,利用Keil5软件调试。位置信息采集转换为数字信号送入PID部分进行计算输出,发送控制信号给电机驱动板来控制电机运动,以此实现电机速度、方向控制,控制流程见图 5。
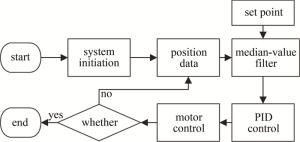
图 5 控制流程
Figure 5. Control flow
-
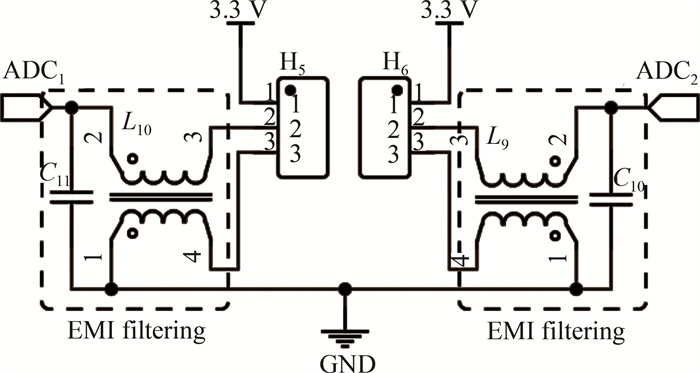
视度补偿时需要将视度补偿透镜移动到准确的调焦位置,避免采集时电压信号波动影响数据准确性,在信号采集电路中加入共模电感和电容进行电磁干扰(electromagnetic interference, EMI)滤波[18]。信息采集通过接插件H5、H6位置处的滑动变阻器对当前位置电压信号实时反馈,再经过ADC将模拟电压信号变换为数字信号并发送给微处理器,微处理器判断位置。该过程对数据的采集速度和精度要求较高,经对比选用满足设计需求的微处理器自带模数转换方案,具有12位高精度且最快转换频率高达3/4 MHz(即每次数据转换需要1.17 μs),采集电路见图 6。
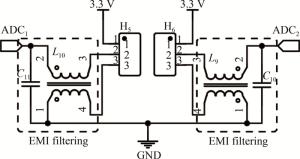
图 6 信息采集电路
Figure 6. Information collecting circuit
-
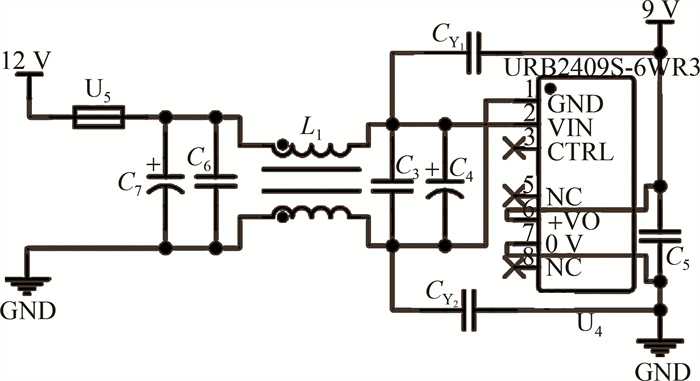
电源是系统不可缺少的部分,电源设计的稳定性和抗干扰能力直接影响电路能否正常工作[19-20]。基于设计需求,为防止电机运动过程中电磁感应现象产生的电流波动影响其它器件正常工作,需要将电机驱动电源与主板电源做有效隔离工作。电机驱动电源采用金升阳URB2409S-6WR3型直流转换隔离电压源,对电压进行降压、隔离,将12 V电压降低至9 V来驱动控制电机,隔离电路见图 7。
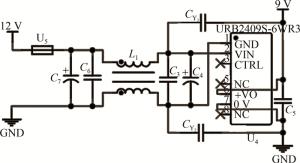
图 7 电压隔离电路
Figure 7. Voltage isolation circuit
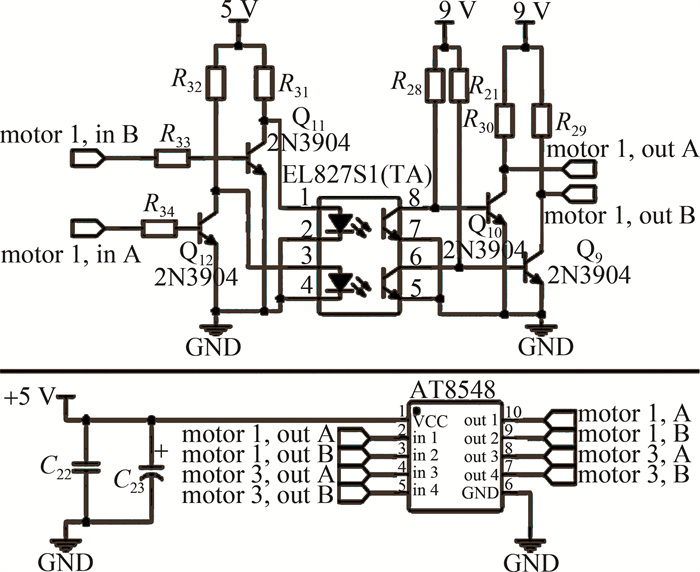
视度补偿镜和双光楔都需要电机控制移动,因此电机驱动部分设计,采用两路电机驱动芯片AT8548作驱动核心,两个电机分别控制视度补偿透镜和双光楔移动。电机工作过程中会产生电磁干扰影响到其它数字电路,系统采用芯片型号为EL827S1(TA)两路光耦模块进行数字信号电气隔离解决此问题,驱动电路见图 8。
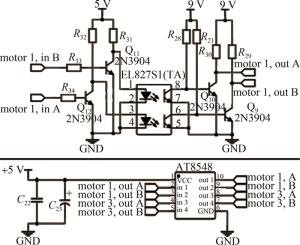
图 8 电机驱动电路
Figure 8. Motor drive circuit
-
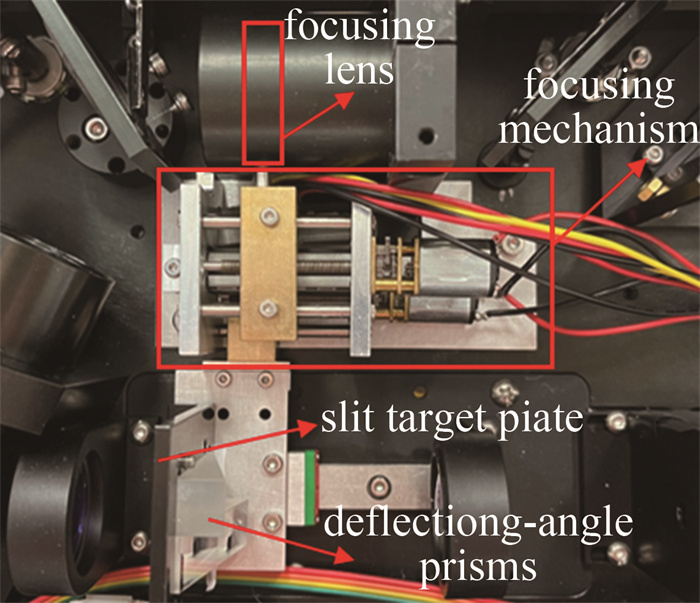
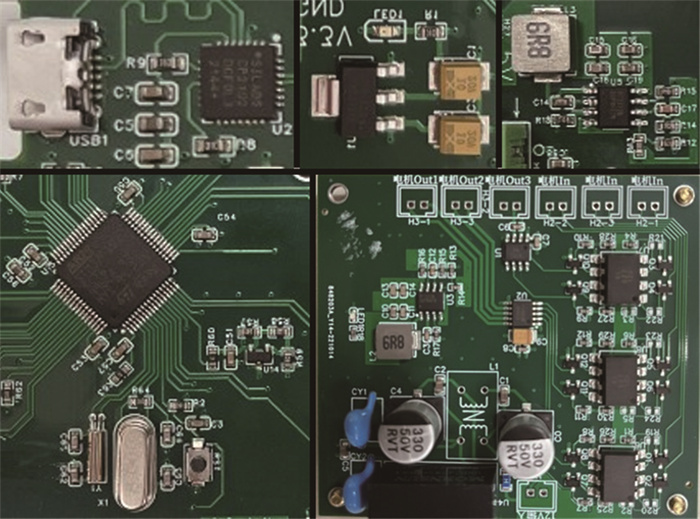
调焦系统接通电源后,执行初始化命令,由传感器采集连续的模拟信号,通过硬件电路和控制程序,电机自动复位至初始位置。进行眼底拍照时对透过双光楔分成两部分的矩形视标进行判断,正视眼情况,两条矩形视标会对齐形成一条完整的矩形视标;近视眼和远视眼情况,两条矩形视标会呈分离状。按照分离间距给微处理器发送指令,微处理器分析指令并判断当前位置,随后分别控制两个电机转动,直到使两条矩形视标中心线重合,最终达到视度补偿的目的。调焦系统见图 9,控制系统见图 10。
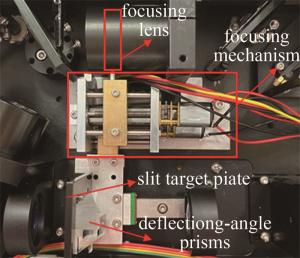
图 9 调焦机构
Figure 9. Focusing mechanism
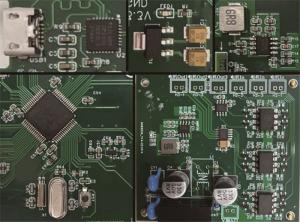
图 10 控制系统
Figure 10. Control circuit
-
视度补偿镜及双光楔位置标定是实现调焦的基础。系统设计实现-10 m-1~10 m-1的屈光补偿,需要标定的参数主要有:视度补偿镜的位移值及其对应的传感器反馈的数字信号值,双光楔的位移值及其对应的传感器反馈的数字信号值,标定数据见表 1。
表 1 数据标定
Table 1. Data calibration
diopter/m-1 displacement value of visual compensation mirror/mm calibration value of visual compensation mirror/Ω displacement value of dual-wedge/mm calibration value of dual-wedge/Ω -10 -6.53 1111 -2.90 1322 -6 -3.99 1474 -1.92 1512 -3 -2.01 1758 -0.99 1656 -1 -0.65 1956 -0.46 1748 0 0 2050 0 1800 1 0.74 2178 0.34 1864 3 2.05 2441 1.24 1993 6 4.16 2820 2.20 2190 10 7.01 3330 3.46 2444 分别对视度补偿镜和双光楔标定电阻值数据使用线性函数y=ax+b来近似拟合出式(2)和式(3)。式(2)表示远视和近视状态不同离焦程度下需要调节的视度补偿镜的补偿位置;式(3)表示远视和近视状态不同离焦程度下双光楔需要调节的位置。
$ \left\{\begin{array}{l} y_1=1800+48 x \\ y_2=1800+64 x \end{array}\right. $
(2) $ \left\{\begin{array}{l} y_1=2050+96 x \\ y_2=2050+128 x \end{array}\right. $
(3) 式中:x表示屈光度;y1表示远视情况电机需要位移距离对应的数字信号值;y2表示近视情况电机需要位移距离对应的数字信号值。
对于给定的屈光不正情况,可以由式(2)和式(3)分别计算出视度补偿镜和双光楔对应驱动电机推动的滑动变阻器的目标阻值。在电机推动滑动变阻器的过程中,实时监控滑动变阻器的阻值,直到阻值达到计算的设定值停止电机驱动。
-
对系统双光楔裂像调焦光路进行光功率测量,得到调焦时瞳孔处905 nm激光的功率为43.2 μW。根据GB 7247.1—2012[21]计算得出905 nm近红外激光照射眼底最大允许光功率为264.0 μW。调焦时使用的光功率远小于安全标准给出的最大允许值,眼底调焦时使用的激光功率是安全的。
-
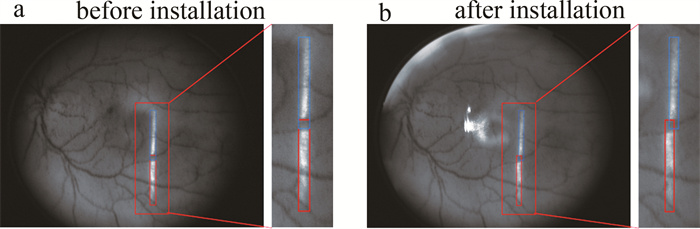
调焦系统应用于眼底照相机中。利用模拟眼进行补偿测试,在模拟眼前分别放置不同的屈光镜片模仿近视眼和远视眼情况,通过上位机发送控制命令移动视度补偿镜对屈光不正进行补偿,重复测试多次。实验结果如图 11~图 13所示。
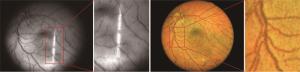
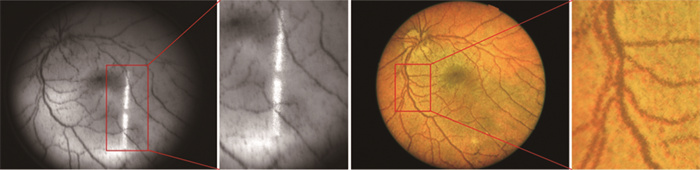
图 11 正视眼(无离焦)
Figure 11. Emmetropia (without defocus)
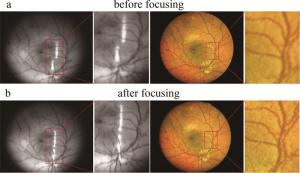
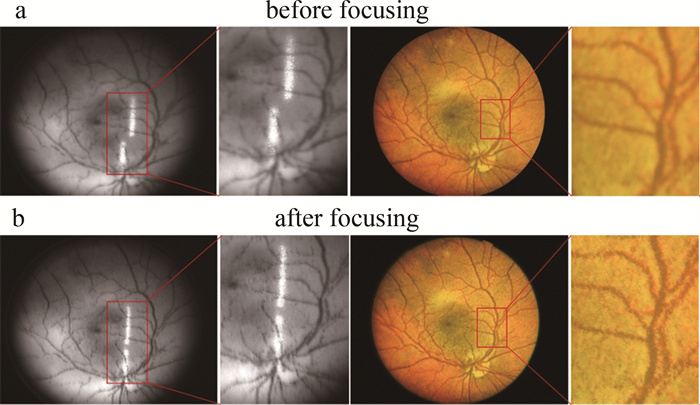
图 12 模拟眼近视状态调焦
Figure 12. Simulation of myopia state focusing
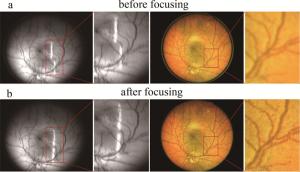
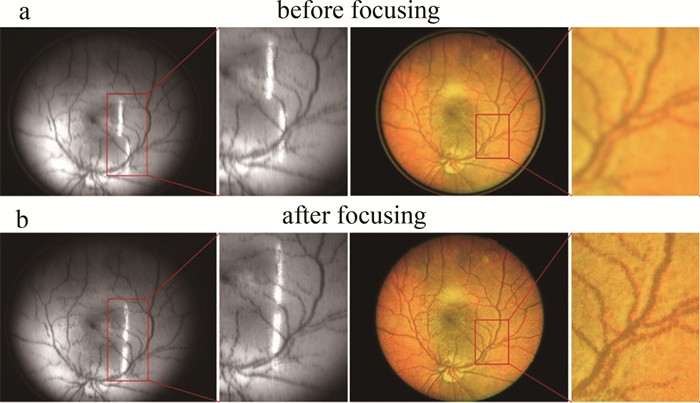
图 13 模拟眼远视状态调焦
Figure 13. Focusing of simulated hyperopia state
可以清晰看出,近视眼和远视眼在不同屈光度情况下两条视标视标呈现不同大小间距,并在补偿之后两条视标视标移动到同一垂直位置上,屈光不正的补偿范围达到-10 m-1~10 m-1。模拟眼眼底成像实验表明,最低在加装1 m-1屈光度镜片时,两个矩形视标有明显分离且分离大小为半个视标宽度,并且可以通过该补偿机构进行补偿,表明该电控调焦系统的调焦精度在1 m-1以上。加装1 m-1屈光镜片视标分离情况见图 14。

图 14 加装1 m-1屈光镜片对比
Figure 14. Comparison of adding 1 m-1 refractive lenses
眼底成像光路中的移动成像部分多采用起视度补偿作用的透镜实现眼底成像调焦,上述眼底成像电控调焦系统在传统的眼底照相机中经实验验证可行,该调焦方法和技术也可以经过改造移植到激光扫描超广角共聚焦眼底成像中。
-
眼底成像检查在眼底病的筛查和诊断中发挥重要作用,其成像质量影响医生对眼底病情的判断。本文作者设计了双光楔裂像电控调焦系统,通过电机控制实现视度补偿镜和双光楔移动,得出视度补偿镜和双光楔位移关联关系,根据矩形视标分离情况实时反馈离焦补偿状态,指导控制系统移动双光楔和视度补偿镜,实现眼底成像时的准确调焦。模拟眼底成像实验表明,该电控调焦系统可以实现-10m-1~10m-1的屈光度补偿,调焦精度在1 m-1以上。该系统调焦速度快、精度高、体积小。可在此基础上发展眼底成像自动调焦技术,研制自动眼底成像仪器。
用于眼底成像的双光楔裂像电控调焦系统
An electronically controlled focusing system using dual light wedge split image for fundus imaging
-
摘要: 为了实现眼底成像时的精准调焦,设计了双光楔裂像电控调焦系统。采用905 nm近红外半导体激光经双光楔和矩形狭缝在视网膜上形成矩形视标的方法,通过电机控制视度补偿镜和双光楔机构移动,得出视度补偿镜和双光楔位移关联关系;根据矩形视标分离情况实时反馈离焦补偿状态,指导控制系统移动双光楔和视度补偿镜,实现眼底成像时的准确调焦,在模拟眼上开展了眼底成像调焦实验。结果表明,系统可实现-10 m-1~10 m-1屈光度补偿,调焦精度在1 m-1以上。该双光楔裂像电控调焦系统调焦速度快、精度高,为发展自动眼底成像仪器提供了基础。Abstract: In order to achieve precise focusing during fundus imaging, an electronically controlled focusing system using dual light wedge split image was designed. A 905 nm near-infrared semiconductor laser was used to form a rectangular sight mark on the retina through a dual light wedge and a rectangular slit. The movement of the sight compensation mirror and the dual light wedge mechanism was realized by motor control, and the displacement correlation between the sight compensation mirror and the dual light wedge was obtained. According to the separation of the rectangular sight mark, the defocus compensation state was real-time feedback, and the control system was guided to move the dual light wedge and the sight compensation mirror to achieve accurate focusing during fundus imaging. The focusing experiment of fundus imaging was conducted on the simulated eye, and the result showed that system can achieve -10 m-1~10 m-1 refractive compensation, and the focusing accuracy was more than 1 m-1. The electronically controlled focusing system using dual light wedge split image has fast focusing speed and high precision, which provides a basis for the development of automatic fundus imaging instruments.
-
Key words:
- laser technique /
- defocus compensation /
- closed-loop control /
- visual target
-
表 1 数据标定
Table 1. Data calibration
diopter/m-1 displacement value of visual compensation mirror/mm calibration value of visual compensation mirror/Ω displacement value of dual-wedge/mm calibration value of dual-wedge/Ω -10 -6.53 1111 -2.90 1322 -6 -3.99 1474 -1.92 1512 -3 -2.01 1758 -0.99 1656 -1 -0.65 1956 -0.46 1748 0 0 2050 0 1800 1 0.74 2178 0.34 1864 3 2.05 2441 1.24 1993 6 4.16 2820 2.20 2190 10 7.01 3330 3.46 2444  下载: 导出CSV
下载: 导出CSV
-
[1] TENBERGE J C, FAZIL Z, BORN L I, et al. Intraocular cytokine profile and autoimmune reactions in retinitis pigmentosa, age-related macular degeneration, glaucoma and cataract[J]. Acta Ophthalmologica, 2019, 97(2): 185-192. doi: 10.1111/aos.13899 [2] SEMERARO F, MORESCALCHI F, CANCARINI A, et al. Diabetic retinopathy, a vascular and inflammatory disease: Therapeutic implications[J]. Diabetes & Metabolism, 2019, 45(6): 517-527. [3] ARONOV M, ALLON R, STAVE D, et al. Retinal vascular signs as screening and prognostic factors for chronic kidney disease: A systematic review and meta-analysis of current evidence[J]. Journal of Personalized Medicine, 2021, 11(7): 665-692. doi: 10.3390/jpm11070665 [4] GUADRON L, TITCHENER S A, ABBOTT C J, et al. The saccade main sequence in patients with retinitis pigmentosa and advanced age-related macular degeneration[J]. Invest Ophthalmology & Visual Science, 2023, 64(3): 1-18. [5] 王曼丽, 李博, 张瑞瑞, 等. 免散瞳眼底照相联合人工智能糖尿病视网膜病变筛查系统在内分泌科的应用价值[J]. 中国糖尿病杂志, 2022, 30(11): 808-811. WANG M L, LI B, ZHANG R R, et al. Application value of non-mydriatic fundus photography combined with artificial intelligence diabetic retinopathy screening system in endocrinology department[J]. Chinese Journal of Diabetes, 2022, 30(11): 808-811(in Chinese). [6] PALMER D W, COPPIN T, RANA K, et al. Glare-free retinal imaging using a portable light field fundus camera[J]. Biomedical Optics Express, 2018, 9(7): 3178-3192. doi: 10.1364/BOE.9.003178 [7] KUMAR V, SURVE A, KUMAWAT D, et al. Ultra-wide field retinal imaging: A wider clinical perspective[J]. Indian Journal of Ophthalmol, 2021, 69(4): 824-835. doi: 10.4103/ijo.IJO_1403_20 [8] WEILIN C, JUN C, XUEHUI Z, et al. Optical design and fabrication of a smartphone fundus camera[J]. Applied Optics, 2021, 60(5): 1420-1427. doi: 10.1364/AO.414325 [9] 张运海, 赵改娜, 张中华, 等. 免散瞳眼底照相机的精密调焦[J]. 光学精密工程, 2009, 17(5): 1014-1019. doi: 10.3321/j.issn:1004-924X.2009.05.012 ZHANG Y H, ZHAO G N, ZHANG Zh H, et al. Accurate focusing of non-mydiratic fundus camera[J]. Optics and Precision Engineering, 2009, 17(5): 1014-1019(in Chinese). doi: 10.3321/j.issn:1004-924X.2009.05.012 [10] 李春才, 巩岩, 李晶, 等. 可诱导人眼自动调焦的眼底相机光学系统设计[J]. 光学学报, 2014, 34(4): 0422001. LI Ch C, GONG Y, LI J, et al. Optical design of an inducible human eye accommodation fundus camera[J]. Acta Optica Sinica, 2014, 34(4): 0422001(in Chinese). [11] 马晨, 程德文, 王其为, 等. 基于高斯括号法的液体透镜调焦眼底相机光学系统设计[J]. 光学学报, 2014, 34(11): 1122001. MA Ch, CHENG D W, WANG Q W, et al. Optical system design of a liquid tunable fundus camera based on Gaussian brackets method[J]. Acta Optica Sinica, 2014, 34(11): 1122001(in Chinese). [12] FAIZAL H, RENOH C, CHIONG H S, et al. A new approach to non-mydriatic portable fundus imaging[J]. Expert Review of Medical Devices, 2022, 19(4): 303-314. doi: 10.1080/17434440.2022.2070004 [13] 江剑宇, 杨波, 万新军, 等. 便携式免散瞳带信标眼底相机光学系统[J]. 光学技术, 2019, 45(2): 240-244. JIANG J Y, YANG B, WAN X J, et al. A portable and mydirtic-free fundus optical system with a beacon[J]. Optical Technique, 2019, 45(2): 240-244(in Chinese). [14] NIE Z, ZHU C, WANG Q, et al. Design, analysis and application of a new disturbance rejection PID for uncertain systems[J]. ISA Transactions, 2020, 101: 281-294. doi: 10.1016/j.isatra.2020.01.022 [15] ISSA M. Enhanced arithmetic optimization algorithm for parameter estimation of PID controller[J]. Arabian Journal for Science and Engineering, 2023, 48(2): 2191-2205. doi: 10.1007/s13369-022-07136-2 [16] 郝晓剑, 张罗新. 基于半导体激光器的Tornambe控制算法研究[J]. 激光技术, 2021, 45(5): 670-674. doi: 10.7510/jgjs.issn.1001-3806.2021.05.022 HAO X J, ZHANG L X. Research on Tornambe control algorithm based on semiconductor laser[J]. Laser Technology, 2021, 45(5): 670-674(in Chinese). doi: 10.7510/jgjs.issn.1001-3806.2021.05.022 [17] 徐一帆, 施阳杰, 邵景珍, 等. 大功率半导体激光器的高精度脉冲电源设计[J]. 激光技术, 2023, 47(1): 108-114. doi: 10.7510/jgjs.issn.1001-3806.2023.01.017 XU Y F, SHI Y J, SHAO J Zh, et al. Design of high-precision pulse power supply for high-power semiconductor laser[J]. Laser Technology, 2023, 47(1): 108-114(in Chinese). doi: 10.7510/jgjs.issn.1001-3806.2023.01.017 [18] 田晶. 基于NUFFT的多光谱数据同步采集与处理系统设计[J]. 激光技术, 2020, 44(3): 353-357. doi: 10.7510/jgjs.issn.1001-3806.2020.03.015 TIAN J. Design of multi-spectral data synchron-ous acquisition and processing system based on NUFFT[J]. Laser Technology, 2020, 44(3): 353-357(in Chinese). doi: 10.7510/jgjs.issn.1001-3806.2020.03.015 [19] 赵宏杰, 李冶. 医疗设备中开关电源的隔离和应用[J]. 医疗装备, 2020, 33(5): 43-45. doi: 10.3969/j.issn.1002-2376.2020.05.020 ZHAO H J, LI Y. Isolation and application analysis of switching power supply in medical equipment[J]. Medical Equipment, 2020, 33(5): 43-45(in Chinese). doi: 10.3969/j.issn.1002-2376.2020.05.020 [20] 田泽礼, 牛春晖, 陈青山. 高速多光谱辐射测温系统研制[J]. 激光技术, 2022, 46(6): 773-778. doi: 10.7510/jgjs.issn.1001-3806.2022.06.010 TIAN Z L, NIU Ch H, CHEN Q Sh. Development of high-speed multi-spectral radiation temperature measurement system[J]. Laser Technology, 2022, 46(6): 773-778(in Chinese). doi: 10.7510/jgjs.issn.1001-3806.2022.06.010 [21] 中国机械工业联合会. 激光产品的安全第一部分: 设备分类, 要求: GB7247.1—2012[S]. 北京: 中国标准出版社, 2012. CHINA MACHINERY INDUSTRY FEDERATION. Safety of laser products——Part 1: Equipment classification and requirements: GB7247.1—2012[S]. Beijing: China Standard Press, 2012(in Chinese). -

 点击查看大图
点击查看大图
图(14) / 表(1)
计量
- 文章访问数: 1179
- HTML全文浏览量: 594
- PDF下载量: 16
- 被引次数: 0
