 网站地图
网站地图


-
近年来,无人机(unmanned aerial vehicle,UAV)技术持续快速发展,单架无人机的技术集成度和功能水平不断提升[1-3]。然而,面对日益复杂的应用环境和不断增长的个性化设计需求,以及受制于无人机自身条件的影响,仍存在部分限制:对于单无人机而言, 其本身的燃料量、载重和尺寸都受到很大的制约, 无法持久续航, 在执行高危险任务时,单无人机可能因为故障等原因而失能,从而导致任务系统容错性不足等等[4]。为了弥补无人机单独作战能力的不足,无人机应以集群的方式协同工作,这样,不但可以更好地发挥无人机编队的优点,而且能够克服单一无人机受自身限制而造成工作故障导致的不良后果,使得执行质量得以改善,以此达到改善系统稳定性、提高任务完成质量的目的[5-6]。因此,研究无人机编队集结问题具有重要意义。
国内外研究者对无人机编队集结领域有着密切的关注。为了解决无人机编队控制和集结速度受到不确定干扰情况等问题,利用自适应控制器来实现无人机姿态跟踪[7]和无人机集群自分离的通道感知转向策略[8],不断调整无人机的状态信息,避免了未知干扰对编队产生不利影响[9],使无人机准确安全完成编队集结,但未考虑无人机编队间的避碰问题。GAZI等人[10]利用聚集和社会觅食群体模型,将其运用到多智能体系系统的编队控制及其移动机器人编队控制的应用中。RYOO等人[11]通过多无人机编队飞行的最优制导规律,并通过控制无人机的飞行时间使无人机同时进入编队。上述文献均是将控制方案与其它算法相结合,以此达到编队控制的目的,但对无人机编队飞行的同时形成特定队形的研究较少。
无人机编队协同的首要任务是实现编队内的信息交互与数据传输[12]。国内外学者已经在编队飞行和无人机系统稳定通信方面进行了深入的研究,涉及通信链长、系统延迟、干扰因子、功率均衡等不稳定因素, 但缺少对无人机通信交互的整体研究[13-14],无人机编队通信交互不佳会导致协同任务不能顺利完成,就需要抗干扰能力强的通信网络来弥补这一不足。而无线紫外光通信通过大气分子和气溶胶粒子的散射进行传播信号[15-16],其具有全天候性、较好的保密性、低背景噪音、抗干扰能力强以及非直视通信等优势;同时,紫外光收发装置结构简单、质量轻、成本低、可靠性高,便于搭载。这些特点使得无线紫外光通信能够在复杂环境中保持无人机集群的稳定通信[17-20]。本文作者提出了一种利用无线紫外光中继协作的无人机集结编队方法,旨在有效应对无人机编队集结时受到强电磁干扰的问题。该方法通过紫外光解决编队集结时的通信困难问题,结合了无线紫外光虚拟势场避障法和一致性理论,以更好地完成编队集结,并保持期望的编队队形。
-
以单架无人机作为质点,建立无人机3维坐标系来描述其运动状态,原点O可以在水平面上的任意位置, Ox轴和Oy轴也是在水平地面上任意选取方向, Oz轴垂直向上,其中Ox轴、Oy轴和Oz轴之间两两垂直。编队内无人机机间可以互相通信,无人机采用的运动方程为[21]:
$ \left\{\begin{array}{l} x_i=v_i \cos \theta_i \sin \varphi_i \\ y_i=v_i \cos \theta_i \sin \varphi_i \\ z_i=v_i \sin \theta_i \\ v_i=\frac{\left|\boldsymbol{T}_i-\boldsymbol{D}_i\right|}{m_i}-g \sin \theta_i \\ \theta_i=\frac{1}{v_i}\left(\frac{\boldsymbol{L}_i}{m_i} \cos \psi_i-g \cos \theta_i\right) \\ \varphi_i=\frac{\boldsymbol{L}_i \sin \psi_i}{m_i v_i \cos \theta_i} \end{array}\right. $
(1) 式中:(xi, yi, zi)用来表示第i架无人机的相对位置坐标;飞行速度为vi;俯仰角为θi;航向角为φi;无人机的质量、重力加速度以及空气阻力分别是mi、g、Di;无人机系统控制输入为$ \boldsymbol{U}=\left[\boldsymbol{T}_i, \boldsymbol{L}_i, \psi_i\right]$;无人机的推力为Ti;气动升力为Li;滚转角为ψi。
将单架无人机作为单一节点,整个编队共有N架无人机,无人机机间通信关系看作节点的边,其有向图$ \boldsymbol{F}=(\boldsymbol{W}, \boldsymbol{E}, \boldsymbol{B})$描述N架无人机机间的通信拓扑,$ \boldsymbol{W}=\left\{\omega_i \mid 1, 2, \cdots, n\right\}$为无人机的节点集合,$ \boldsymbol{E} \subseteq\{e(i , j), i, j \in W\}$为边集合,编队整体拓扑关系可用邻接矩阵$ \boldsymbol{B}=\left(b_{i j}\right)_{n \times n}$来表示,具体可描述为:
$ b_{i j}=\left\{\begin{array}{l} 1 \\ 0 \end{array}, \quad\left(\omega_j \in \boldsymbol{N}_i, i=1, 2, \cdots, n\right)\right. $
(2) 式中:$ \boldsymbol{N}_i=\left\{\omega_j \mid e_{i j} \in \boldsymbol{E}, j \equiv i\right\}$,Ni是无人机的一个集合;ωj代表第j架无人机的节点;eij代表当i和j相等时无人机i和无人机j两者之间可以进行通信;e(i, j)代表第i架无人机和第j架无人机构成的一条边;Ni、ωj、eij和e(i, j)均是常量。若bij=0,无人机i和j之间不能通信;bij=1,无人机i和j之间能通信。图 1为六边形编队拓扑结构。图中,leader代表领航无人机,在其周围的是跟随无人机,在六边形编队拓扑结构中无人机是双向通信的。
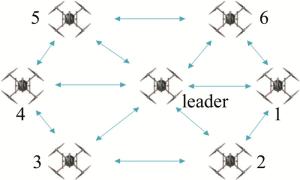
图 1 六边形编队拓扑结构
Figure 1. Hexagonal formation communication topology
-
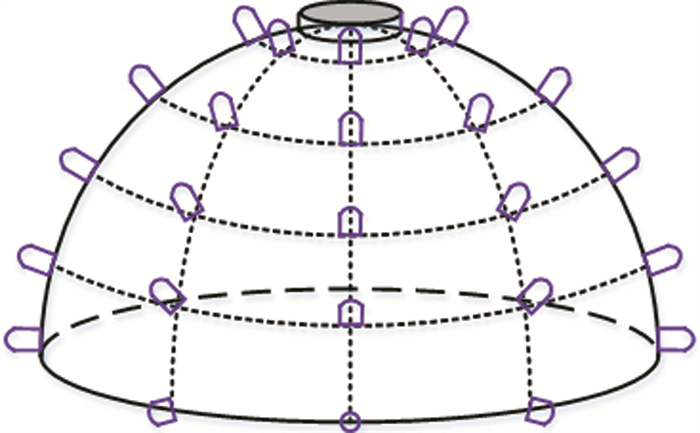
紫外信标引导装置如图 2所示。这是一个半球形紫外发光二极管(light-emitting diode,LED)阵列结构,每个紫外信标装置都具有唯一确定的信号标识。该装置被纵横交错的经线和纬线包围,并且在每个经线和纬线相交的节点处放置一个紫外LED,顶部全向接收,无人机编队内成员间需要确认方位信息时,每个紫外LED都具有不同的身份(identity,ID)编号,该ID编号由该LED所处的经线号和纬线号组成,且每个LED可以独立控制,独立发送信息。当无人机上搭载的紫外信标引导装置的LED被点亮时,则这个LED将要传递的通信内容及它的ID编号以编码的形式发送给与之通信的UAV,使得这两架无人机不仅可以准确判断对方的位置信息,而且可以保持高效的通信。在非直视(non-line-of-sight, NLOS)情况下,无线紫外光接收端接收功率为[21]:
$ \begin{gathered} P_{\mathrm{r}, \mathrm{NLOS}}= \\ \frac{P_{\mathrm{t}} A_{\mathrm{r}} K_{\mathrm{s}} P_{\mathrm{s}} \varphi_2 \varphi_1^2 \sin \left(\theta_1+\theta_2\right)}{32 \pi^3 R \sin \theta_1\left[1-\cos \left(\frac{\varphi_1}{2}\right)\right]} \\ \exp \left[-\frac{K_{\mathrm{e}} R\left(\sin \theta_1+\sin \theta_2\right)}{\sin \left(\theta_1+\theta_2\right)}\right] \end{gathered} $
(3) 式中:R为通信直线距离;Pt为发送功率;Ar为接收孔径面积;Ke=Ka+Ks为大气信道衰减系数,其中Ka为吸收系数,Ks为散射系数;Ps为散射角的相函数。
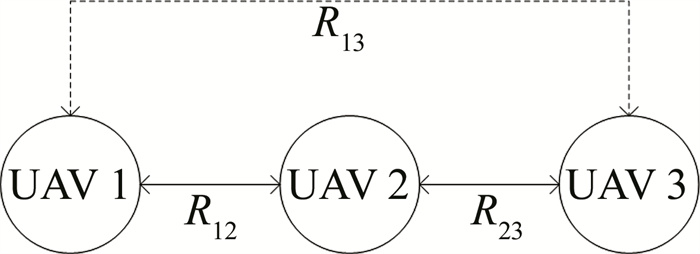
将紫外信标引导装置搭载在无人机上,无人机机载无线紫外光中继协作通信模型以三节点为例,图 3为无线紫外光中继协作通信传输机制示意图。图中,UAV 1为领航无人机,UAV 2和UAV 3为跟随无人机,领航无人机UAV 1作为该通信传输机制的起始点,跟随无人机UAV 2作为两者之间的中继通信点,跟随无人机UAV 3作为该传输机制的目标点,UAV 1和UAV 2、UAV 1和UAV 3、UAV 2和UAV 3之间的距离分别是R12、R13、R23。由图 3可知,UAV 1、UAV 2和UAV 3这3架无人机两两之间是可以通信的,但在实际通信过程中由于UAV 1和UAV 3之间距离较远,不能保证两者之间通信传输的准确性,此时需要通过中继协作节点UAV 2来保证两者之间通信的可靠性。
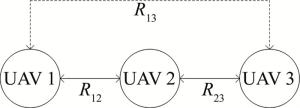
图 3 无线紫外光中继协作通信传输机制示意图
Figure 3. Schematic diagram of wireless ultraviolet optical relay cooperative communication transmission mechanism
-
根据无线紫外光的散射特性,在每架无人机的顶部装载一个半球形的紫外信标引导装置,可以在无人机周围形成全方位覆盖的3维紫外虚拟势场。本文中将编队邻域内其它无人机看作障碍物,在此基础上构建避障无线紫外光虚拟势场函数J(p):
$ J(\boldsymbol{p})=\frac{b_0}{\exp \left(\frac{r_{\text {obs }}}{c_0}\right)-\exp \left(\frac{r_{\min }}{c_0}\right)}, \left(r_{\text {obs }} \leqslant r_{\text {max }}\right) $
(4) 式中:$ \boldsymbol{p}=[x, y]^{\mathrm{T}}$表示无人机的水平位置;b0和c0为常数,分别决定紫外虚拟势场的幅值和变化速度;robs表示障碍物的半径;rmax表示无人机可通过的最大半径。以J(p)对p的负梯度作为无人机受到的虚拟排斥力,即$ \boldsymbol{F}(\boldsymbol{p})=-\nabla_\boldsymbol{p} J(\boldsymbol{p})$,具体公式如下:
$ \begin{gathered} \boldsymbol{F}(\boldsymbol{p})=\frac{b_0}{c_0} \cdot \frac{\exp \left(\frac{r_{\mathrm{obs}}}{c_0}\right)}{\exp \left(\frac{r_{\text {obs }}}{c_0}\right)-\exp \left(\frac{r_{\min }}{c_0}\right)} \cdot \frac{\boldsymbol{r}}{r_{\mathrm{obs}}}, \\ \left(r_{\text {obs }} \leqslant r_{\text {max }}\right) \end{gathered} $
(5) 式中:障碍物与无人机之间的相对位置由$ \boldsymbol{r}=\left[x-x_{\mathrm{obs}} , \left.y-y_{\text {obs }}\right]^{\mathrm{T}}\right.$表示。
如果飞行环境中的障碍物有多个,则无人机会受到多个紫外虚拟势场的影响。根据可加性原理,其总虚拟排斥力等于多个虚拟排斥力的总和,即:
$ \boldsymbol{F}_{\mathrm{tot}}(\boldsymbol{p})=\sum\limits_{l=1}^m \boldsymbol{F}_l(\boldsymbol{p}), \left(r_{\mathrm{obs}}^{(l)} \leqslant r_{\max }{ }^{(l)}\right) $
(6) 式中:Ftot(p)表示无人机受到的总紫外虚拟排斥力;l=1表示一架无人机产生紫外虚拟斥力;m表示对无人机产生紫外虚拟斥力的障碍物总数。
以Ftot(p)作为无人机的避障速度指令va,即:
$ \boldsymbol{v}_{\mathrm{a}}=\boldsymbol{F}_{\mathrm{tot}}(\boldsymbol{p})=\sum\limits_{l=1}^m \boldsymbol{F}_l(\boldsymbol{p}), \left(r_{\mathrm{obs}}{ }^{(l)} \leqslant r_{\max }{ }^{(l)}\right) $
(7) -
首先确定无人机编队的集结区域等相关信息,信息确认后各无人机向目标区域飞行。考虑到编队内无人机的起始位置和状态信息各不相同,采用一致性控制策略,以确保编队内无人机能够形成期望的编队队形。同时,利用一致性理论调整编队内无人机的状态信息,使其顺利完成编队集结任务。
当无人机编队集结点确定时,参考集结点是以领航无人机的位置坐标(xi, yi, zi)Τ为中心,各无人机根据与领航无人机之间的期望位置,形成相应的目标集结点。利用无线紫外光完成编队内的信息交互确定各自的集结位置,具体步骤如下:(a)领航无人机到达特定区域,确定无人机编队的集结位置后,进入下一步;(b)利用机载紫外设备实现无人机编队内部互相通信,采用第2节中的编码方式共享跟随无人机和自身无人机的位置及能量等信息;(c)编队内无人机确定各自及其它无人机的位置姿态信息,并根据自身的当前实时信息进行分配集结目标点;(d)编队内跟随无人机到达集结目标点;首先,各无人机之间互相确认各自及其它无人机的位置姿态信息,其次,各无人机根据式(4)和式(6)计算自身的紫外虚拟势场力和排斥力,然后,编队内无人机根据式(7)计算出各自的避障速度,最后,无人机编队根据计算的信息飞往集结目标点;(e)判断编队内跟随无人机是否到达目标集结点,若到达目标集结点,说明编队集结成功,否则返回步骤(b),直至编队内所有跟随无人机到达集结目标点;(f)编队集结成功后,为了确保领航无人机与其它未到达集结点的跟随无人机之间通信的可靠性,此时以已经到达集结目标点的跟随无人机为中继协作节点,代替领航无人机与其它跟随无人机进行通信,继续执行步骤(b)~步骤(e),直至所有跟随无人机集结成功。
-
为验证所提出的无线紫外光中继协作无人机集结编队方法的有效性,进行了基于仿真软件的无人机编队仿真实验。实验过程包括以下步骤:首先,领航无人机单独飞至集结区域,并在空中悬停;接着,其它跟随无人机从各自的起始位置飞向领航无人机周围,逐渐形成四边形编队、五边形编队和六边形编队;然后,领航无人机在空中做圆周运动,其它跟随无人机从起始位置向领航无人机周围集结并生成期望编队,在编队队形确定后,各无人机的状态信息趋于一致,并保持编队队形继续飞行。
无人机编队集结时,领航无人机有1架,跟随无人机有4架、5架和6架,跟随无人机需向领航无人机周围集结,经过一段时间后收敛到以领航无人机为中心的四边形、五边形、六边形编队。验证在形成这些期望编队队形时,领航无人机的速率为300 m/s,角速度为0.036 rad/s, 编队期望距离为300 m,其无人机编队初始位置如表 1所示。
表 1 无人机编队初始位置
Table 1. Initial position of UAV formation
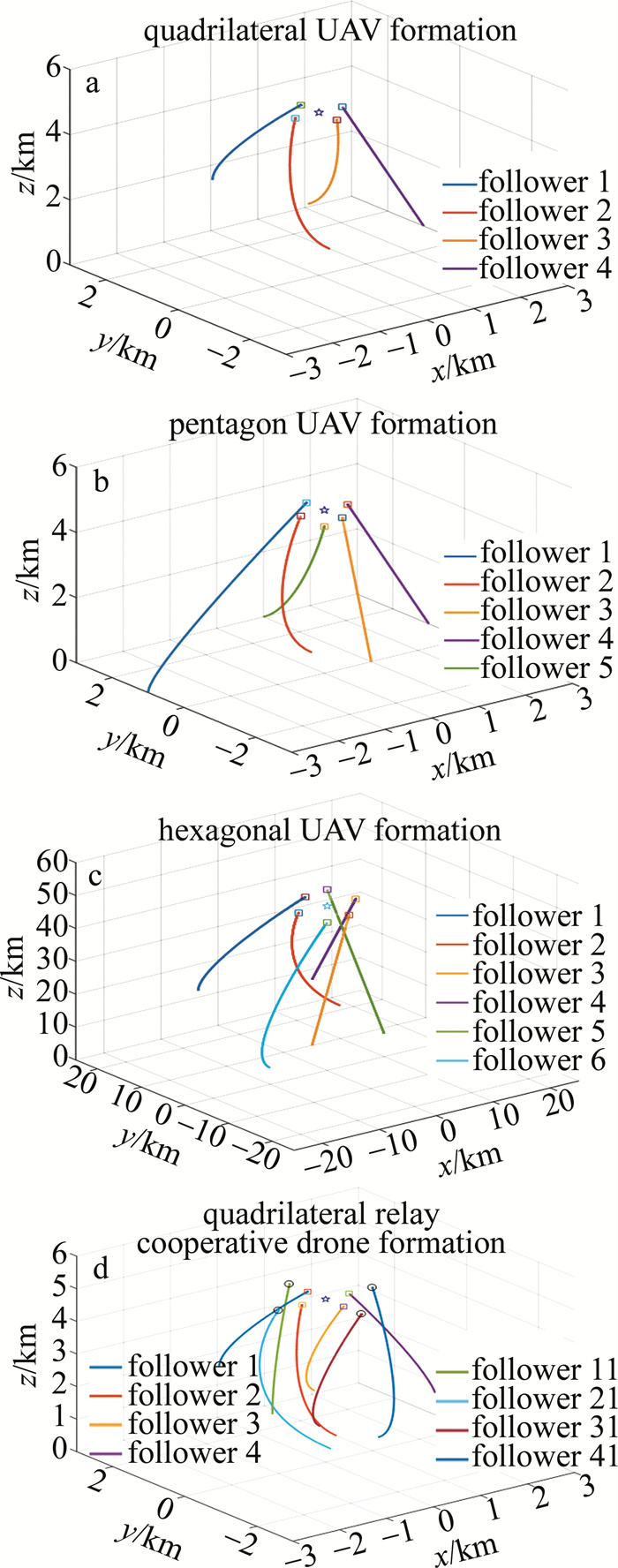
UAV quadrilateral formations/m pentagon formation/m hexagonal formation/m leader (0, 0, 50) (0, 0, 50) (0, 0, 500) follower 1 (15, 10, 15) (-30, 10, 0) (150, 100, 250) follower 2 (10, 10, 0) (5, 10, 0) (100, 100, 100) follower 3 (-10, -10, 5) (10, 0, 0) (50, 100, 0) follower 4 (30, 10, 0) (30, 10, 0) (50, 100, 200) follower 5 — (10, 30, 10) (100, 0, 70) follower 6 — — (-100, 0, 50) 无人机编队集结的仿真环境为3 km×3 km×6 km和30 km×30 km×60 km。图 4为无人机编队集结示意图。图 4a为四边形无人机编队;图 4b为五边形无人机编队;图 4c为六边形无人机编队;图 4d为中继协作的四边形编队。图中,领航无人机用★表示,跟随无人机由□表示。由图 4可知,领航无人机到达指定区域时,其它无人机由起始位置出发向领航无人机方向集结,在z=5 km处跟随无人机形成了四边形无人机编队和五边形无人机编队,在z=50 km处各跟随无人机形成六边形无人机编队,图 4d是以四边形编队为例,当跟随无人机follower 1、follower 2、follower 3、follower 4以领航无人机为中心在空中集结完毕后,此时将跟随无人机follower 1、follower 2、follower 3、follower 4作为中继节点,继续领航跟随无人机follower 11、follower 21、follower 31、follower 41在空中完成集结并形成四边形编队,以此来提高编队间的通信性能。
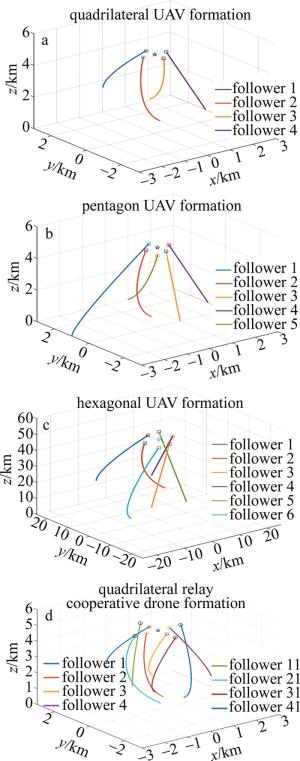
图 4 无人机编队集结示意图
Figure 4. Schematic diagram of the assembly of UAV formation
将编队集结高度调整为5 km,在以上3种无人机编队的基础上,领航无人机在指定区域进行圆周运动,其中无人机编队初始位置如表 2所示。
表 2 无人机编队的初始位置
Table 2. Initial position of UAV formation
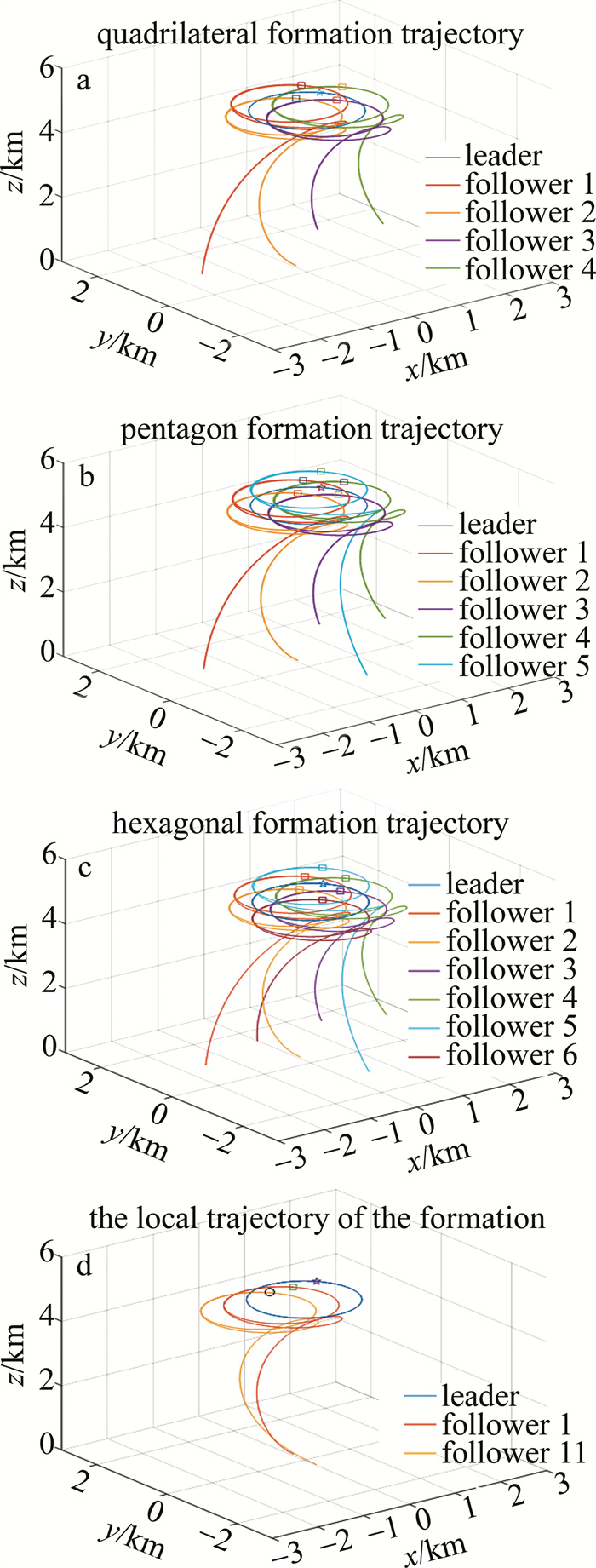
UAV x/m y/m z/m leader 0 0 50 follower 1 -15 10 0 follower 2 -10 -10 10 follower 3 10 10 5 follower 4 5 -15 20 follower 5 5 -10 0 follower 6 0 15 0 3维仿真环境为3 km×3 km×6 km的正方体区域,无人机编队中领航无人机的个数为1,跟随无人机的分别为4架、5架和6架。领航无人机到达一定高度开始做圆周运动,跟随无人机收到领航无人机的通信指令,从起始位置出发直至形成特定编队队形,图 5为3维场景下无人机编队集结示意图。图 5a为四边形编队轨迹;图 5b为五边形编队轨迹;图 5c为六边形编队轨迹;图 5d为编队局部运动轨迹。从图 5a~图 5c可以看出,领航无人机在特定区域做圆周运动,各架跟随无人机从起始位置出发飞向领航无人机周围集结,在z=5 km处各跟随无人机形成四边形编队、五边形编队和六边形编队;图 5d是跟随无人机follower 1已经在领航无人机周围集结成功,此时以follower 1作为中继协作节点领航跟随无人机follower 11,使其完成编队集结任务。

图 5 3维场景下无人机编队集结示意图
Figure 5. Schematic diagram of UAV formation assembly in a 3-D scene
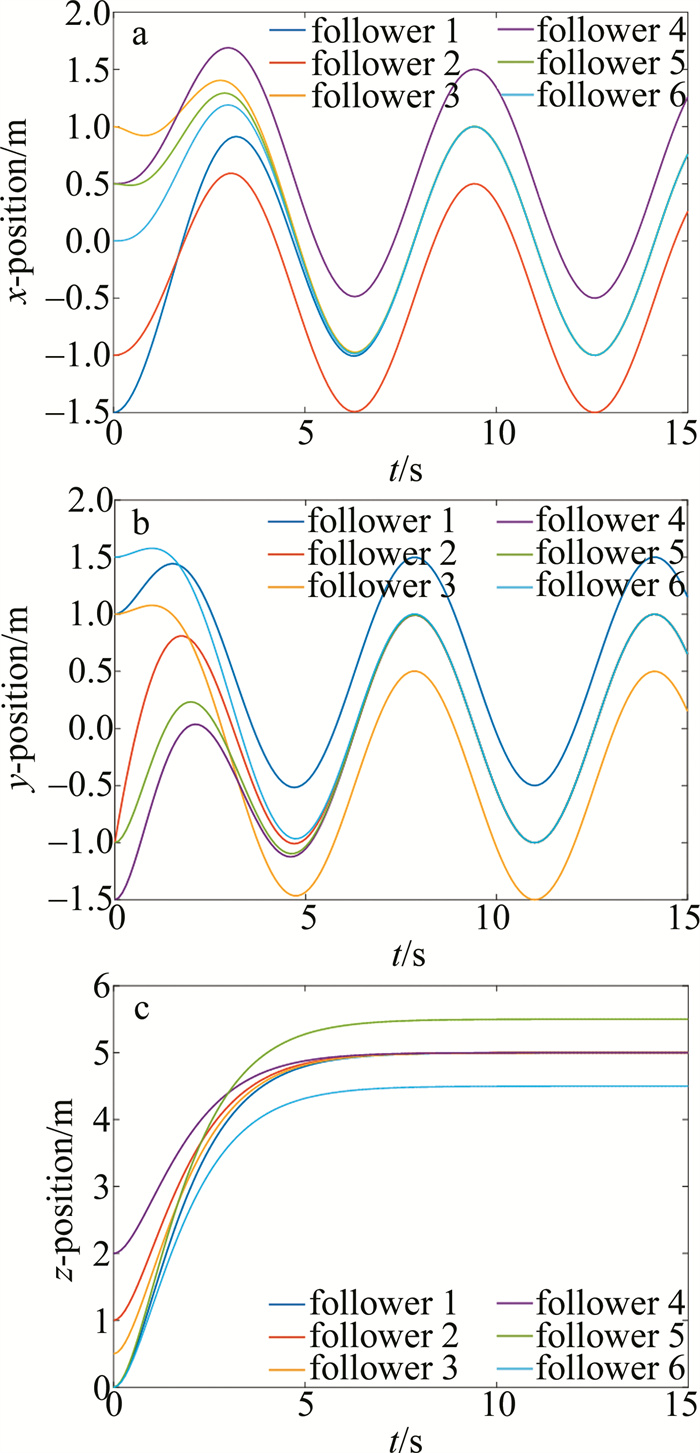
以无人机六边形编队为例,跟随无人机在不同方向上的位置变化由图 6所示。跟随无人机的起始位置随机设置,由图 6可知,各无人机在x方向、y方向和z方向上的起始位置不同,在t=5 s左右各跟随无人机在x方向、y方向和z方向上位置处于动态稳定,这为后序无人机编队的成功集结提供了有力条件。
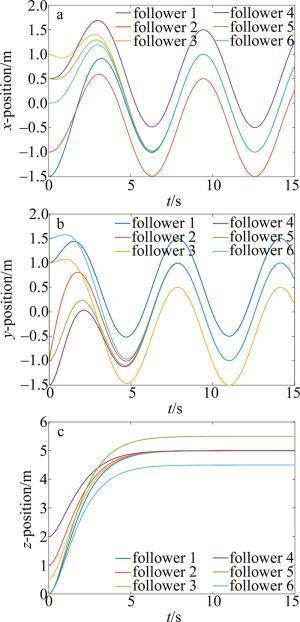
图 6 跟随无人机不同方向上的位置变化
Figure 6. Follow the change of position in different directions of the drone
在仿真实验过程中,设置各架跟随无人机z方向上的速率恒为200 m/s,这样可以保证所有跟随无人机之间的高度差不会相差太大,同时,也保证了无人机编队的集结成功。以六边形编队为例,跟随无人机不同方向上的速率变化如图 7所示。从图 7可知,跟随无人机在x方向和y方向上的起始速率不一致,这是因为各架跟随无人机距离领航者周围的集结位置距离不一致,各架跟随无人机需要根据各自的位置调整自身的飞行速率,在t=25 s左右各架跟随无人机水平方向和垂直方向上的速率变化明显变小;在t=35 s后各架跟随无人机x方向和y方向上的速率基本一致。

图 7 跟随无人机不同方向上的速度变化
Figure 7. Follow the speed changes in different directions of the drone
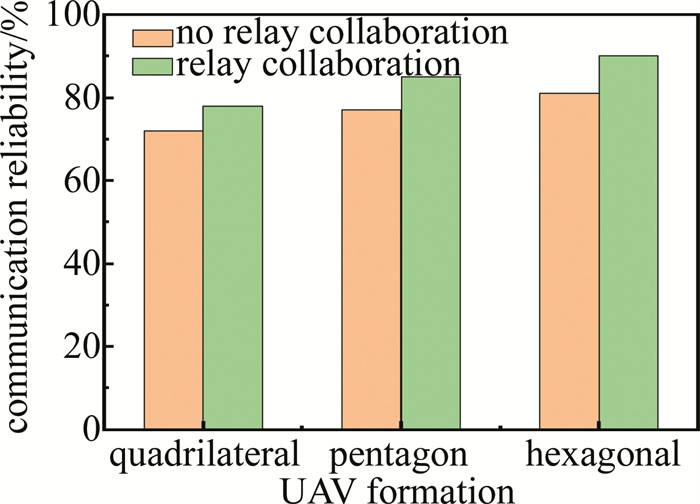
基于位置误差分布计算每架无人机在目标区域准确集结的概率,将每架无人机的集结概率相加,得到整个编队无人机正确集结的概率,并将整个编队无人机正确集结的概率作为无人机编队通信的效能,同时判断在有无中继情况下无人机编队的通信可靠性是否提升,具体公式为:[(有中继无人机编队的通信可靠性-无中继无人机编队的通信可靠性)/有中继无人机编队的通信可靠性]×100%。无人机编队的通信效能如图 8所示。可以看出,无人机编队的通信可靠性与其通信效能呈正相关。图中绿色和橙色代表有无无线紫外光中继协作无人机编队的通信可靠性。本文作者通过多次实验并取平均值,验证了在没有无线紫外光中继协作情况下四边形编队、五边形编队和六边形编队的通信可靠性分别为72%、77%和81%,有无线紫外光中继协作情况下四边形编队、五边形编队和六边形编队的通信可靠性分别为78%、85%和90%,从图 8可以发现,随着无人机数量的增加,编队通信可靠性在不断增加,同时对比没有无线紫外光中继协作和有无线紫外光中继协作的情况下,四边形编队、五边形编队和六边形编队的通信可靠性分别提升了7.69%、9.41%和10.0%。
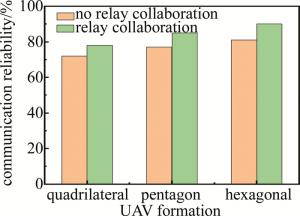
图 8 无人机编队的通信效能
Figure 8. Communication effectiveness of UAV formations
-
强电磁干扰对无人机编队信息交互有一定影响,导致无人机编队无法迅速集结成期望编队队形。为了解决以上问题,利用无线紫外光来保障无人机编队间的通信定位,通过将一致性理论与无线紫外光虚拟势场法相结合,验证了领航无人机在悬停和进行圆周运动的情况下,各跟随无人机能够迅速到达集结区域并形成期望的编队队形,以跟随无人机作为中继节点,提升相邻无人机发现概率,提高编队成形准确性。未来工作将继续优化算法性能,并将其运用到实际工程中。
无线紫外光中继协作无人机集结编队方法
The method of wireless ultraviolet relay cooperation UAV assembly formation
-
摘要: 为了解决无人机集结编队时机间通信易受强电磁干扰问题,采用紫外信标模型完成集群无人机的信息交互,从而实现集结定位,将一致性理论与无线紫外光虚拟势场避障法相结合,在空中集结时使无人机编队的飞行姿态、航向角以及速度保持一致,以跟随无人机作为中继节点,提升相邻无人机发现概率,提高编队队形准确性;同时提出无线紫外光通信协作无人机中继集结编队方法,实现了无人机编队快速准确形成期望编队队形。结果表明,所提方法使得无人机四边形编队、五边形编队、六边形编队的通信可靠性分别提升了7.69%、9.41%和10.0%。该研究为无人机编队集结方法和无人机编队中的机间通信提供了一定的理论参考。Abstract: In order to solve the problem that communication between unmanned aerial vehicles (UAVs)in formation was susceptible to strong electromagnetic interference, the ultraviolet (UV)signal model was adopted to complete the information interaction of cluster UAVs to achieve the formation and positioning, combining the consistency theory with the wireless UV virtual potential field obstacle avoidance method, so as to make the UAV formation reach the consistency of speed, heading angle and flight attitude when gathering in the air, and to follow the UAVs as the relay node to enhance the probability of discovery by the adjacent UAVs. Improve the accuracy of formation. The wireless UV optical communication collaborative UAV relay assembly and formation method was proposed to achieve the rapid and accurate formation of UAV formation into the desired formation. The results show that the proposed method improves the communication reliability of UAV quadrilateral, pentagonal, and hexagonal formations by 7.69%, 9.41%, and 10.0%, respectively. This study provides some theoretical references for UAV formation assembly methods and inter-aircraft communication in UAV formations.
-
图 3 无线紫外光中继协作通信传输机制示意图
Figure 3. Schematic diagram of wireless ultraviolet optical relay cooperative communication transmission mechanism
图 5 3维场景下无人机编队集结示意图
Figure 5. Schematic diagram of UAV formation assembly in a 3-D scene
图 6 跟随无人机不同方向上的位置变化
Figure 6. Follow the change of position in different directions of the drone
图 7 跟随无人机不同方向上的速度变化
Figure 7. Follow the speed changes in different directions of the drone
表 1 无人机编队初始位置
Table 1. Initial position of UAV formation
UAV quadrilateral formations/m pentagon formation/m hexagonal formation/m leader (0, 0, 50) (0, 0, 50) (0, 0, 500) follower 1 (15, 10, 15) (-30, 10, 0) (150, 100, 250) follower 2 (10, 10, 0) (5, 10, 0) (100, 100, 100) follower 3 (-10, -10, 5) (10, 0, 0) (50, 100, 0) follower 4 (30, 10, 0) (30, 10, 0) (50, 100, 200) follower 5 — (10, 30, 10) (100, 0, 70) follower 6 — — (-100, 0, 50)  下载: 导出CSV
下载: 导出CSV
表 2 无人机编队的初始位置
Table 2. Initial position of UAV formation
UAV x/m y/m z/m leader 0 0 50 follower 1 -15 10 0 follower 2 -10 -10 10 follower 3 10 10 5 follower 4 5 -15 20 follower 5 5 -10 0 follower 6 0 15 0
下载: 导出CSV
-
[1] CHEN C, ZHENG Z, XU T, et al. YOLO-based UAV technology: A review of the research and its applications[J]. Drones, 2023, 7(3): 190-219. doi: 10.3390/drones7030190 [2] ALAM M S, OLUOCH J. A survey of safe landing zone detection techniques for autonomous unmanned aerial vehicles (UAVs)[J]. Expert Systems with Application, 2021, 179: 115091. doi: 10.1016/j.eswa.2021.115091 [3] ZHANG Z X. Deconstruction of the application of police drone technology integrating Fourier fast transform algorithm in the 5G network era[J]. Mathematical Problems in Engineering, 2022(3): 1-11. [4] 李鹏举, 毛鹏军, 耿乾, 等. 无人机集群技术研究现状与趋势[J]. 航空兵器, 2020, 27(4): 25-32. LI P J, MAO P J, GENG Q, et al. Research status and trend of UAV swarm technology[J]. Aviation weapons, 2020, 27(4): 25-32(in Chinese). [5] ZHANG J, XING J H. Cooperative task assignment of multi-UAV system[J]. Chinese Journal of Aeronautics, 2020, 33(11): 2825-2827. doi: 10.1016/j.cja.2020.02.009 [6] XU Ch, XU M, YIN Ch J. Optimized multi-UAV cooperative path planning under the complex confrontation environment—ScienceDirect[J]. Computer Communications, 2020, 162: 196-203. doi: 10.1016/j.comcom.2020.04.050 [7] HUANG Y, MENG Z Y. Bearing-based distributed formation control of multiple vertical take-off and landing UAVs[J]. IEEE Transactions on Control of Network Systems, 2021, 8(3): 1281-1292. doi: 10.1109/TCNS.2021.3061941 [8] DANIEL K, ROHDE S, GODDEMEIER N, et al. A communication aware steering strategy avoiding self-separation of flying robot swarms[C]//2010 5th IEEE International Conference Intelligent Systems. London, UK: IEEE Press, 2010: 254-259. [9] 蒋婉玥, 王道波, 王寅. 基于时变向量场的多无人机编队集结控制方法[J]. 控制理论与应用, 2018, 35(9): 1215-1228. JIANG W Y, WANG D B, WANG Y. Multi-UAV formation assembly control method based on time-varying vector field[J]. Control Theory and Application, 2018, 35(9): 1215-1228(in Chinese). [10] GAZI V, PASSINO K M. Stability analysis of swarms[J]. IEEE Transactions on Automatic Control, 2003, 48(4): 692-697. doi: 10.1109/TAC.2003.809765 [11] RYOO C, KIM Y, TAHK M. Optimal UAV formation guidance laws with timing constraint[J]. International Journal of Systems Science, 2006, 37(6): 415-427. doi: 10.1080/00207720500438340 [12] DAI J Y, WANG Sh H, YUAN J, et al. Multi-UAV cooperative formation flight control based on APF & SMC[C]//2017 2nd International Conference on Robotics and Automation Engineering (ICRAE). Shanghai: IEEE Press, 2017: 222-228. [13] HAN J, CAO X, WANG L, et al. SAR image change detection based on deep denoising and CNN[J]. IET Image Processing, 2019, 13(9): 1509-1515. doi: 10.1049/iet-ipr.2018.5172 [14] YOUSSEF A A. Adaptive LDPC coded high data rate based IR-UWB combined with VMI-MO system for vehicular communication links[J]. AEU-International Journal of Electronics and Communications, 2023, 169: 154747. [15] ZHAO T, XIE Y, XU S, et al. Flocking of UAV formation with wireless ultraviolet communication[J]. Wireless Personal Communications, 2020, 114(3): 2551-2568. doi: 10.1007/s11277-020-07489-7 [16] ARYA S, CHUNG Y H. Novel indoor ultraviolet wireless communication: Design implementation, channel modeling, and challenges[J]. IEEE Systems Journal, 2020, 15(2): 2349-2360. [17] 赵太飞, 容开新, 王一琼, 等. 改进蝙蝠算法的紫外光引导无人机路径规划[J]. 激光技术, 2023, 47(5): 678-685. doi: 10.7510/jgjs.issn.1001-3806.2023.05.016 ZHAO T F, RONG K X, WANG Y Q, et al. Path planning of ultraviolet light guided UAV with improved bat algorithm[J]. Laser Technology, 2023, 47(5): 678-685(in Chinese). doi: 10.7510/jgjs.issn.1001-3806.2023.05.016 [18] MA Z, AI B, HE R, et al. Impact of UAV rotation on MIMO channel characterization for air-to-ground communication systems[J]. IEEE Transactions on Vehicular Technology, 2020, 69(11): 12418-12431. doi: 10.1109/TVT.2020.3028301 [19] 马愈昭, 程飞帆, 贾惠婷, 等. 雾天环境下SIMO NLOS紫外光通信系统性能研究[J]. 激光与光电子学进展, 2021, 58(11): 1106007. MA Y Zh, CHENG F F, JIA H T, et al. Study on the performance of SIMO NLOS ultraviolet optical communication system in foggy environment[J]. Laser & Optoelectronics Progress, 2021, 58(11): 1106007(in Chinese). [20] 赵太飞, 曹丹丹, 马倩文. 紫外光通信协作无人机最优刚性编队生成算法[J]. 激光与光电子学进展, 2021, 58(5): 0506001. ZHAO T F, CAO D D, MA Q W. Optimal rigid formation generation algorithm for ultraviolet optical communication cooperative UAV[J]. Laser & Optoelectronics Progress, 2021, 58(5): 0506001 (in Chinese). [21] ZHAO T F, RONG K, ZHANG G. Research on the rapid assembly algorithm of the wireless ultraviolet cooperative UAV formation[J]. Optics Express, 2022, 30(20): 35163-35178. doi: 10.1364/OE.463945 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 1107
- HTML全文浏览量: 551
- PDF下载量: 7
- 被引次数: 0
