 网站地图
网站地图

-
激光干涉检测技术在半导体精密加工、航空航天和国计民生设备检测及计量校准方面非常重要。它是以波长为基准完成被测对象的比较测量,通过各种类型的干涉图像来反映长度、角度、平行度、振动、直线度和平面度,以及透明介质特征参数等被测物理量的信息[1-4]。由于被测对象和测量手段的不同,条纹图形的结构差异非常大。其中同心圆环的干涉图形因其结构对称、圆心干涉级次具有确定值和多圆环信息丰富等优点受到研究者的青睐,它在等倾干涉技术[5]、牛顿环技术[6]、F-P干涉技术[7]和分波面非定域干涉技术[8-10]检测方面处于关键性的地位。为了实现自动化检测,提高测量精度,研究者对同心圆环的条纹定中、圆心和半径的精确提取等方面做了大量工作[11-12]。
本文作者在实验中采用非定域干涉技术进行角度和厚度的测量,为此需要一种良好的、精确度高、信息利用率高的图像处理技术。但是在这方面众多的方法都是仅对亮环加以处理利用,而没有兼顾暗环[13-18],这就丢失了同心圆环干涉图形中暗环所携带的约50%的有用信息。本文中提出了一种基于图像取反的暗亮环兼顾的同心圆环半径和圆心提取方法,可以实现亮环和暗环的同时提取,而又不失提取精度。算法以点光源非定域干涉同心圆环实验图片为对象,首先通过霍夫圆变换自动获取图片的参考圆心,然后在其上下左右每隔5 pixel取一条强度轮廓线,在平滑降噪和图像取反后获得系列条纹中心,利用圆回归拟合的方法精确提取系列半径和圆心,最后,通过系列圆心和半径的平均运算实现图像最终圆心和半径的精确提取。
-
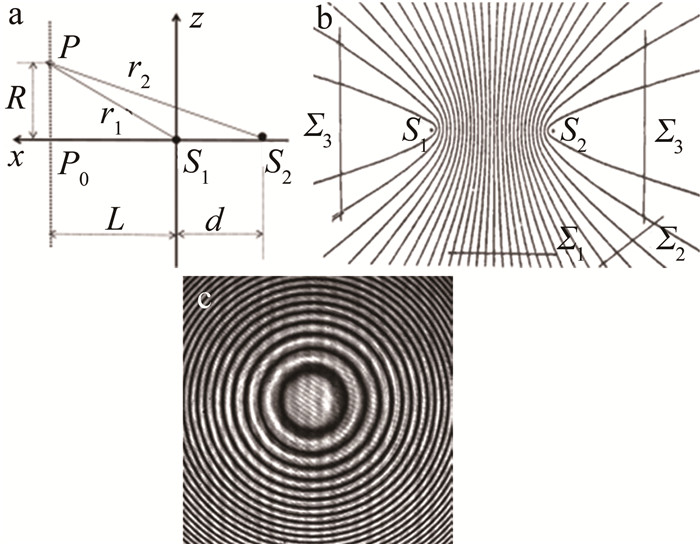
点光源的非定域相干叠加的原理[19]如图 1a所示。两个相距为d的点光源S1和S2,它们各自发出的光波分别经过r1和r2路径后在空间P点相遇叠加。具有相同光程差的空间点构成了以S1和S2连线为轴线的双曲面族,如图 1b所示。当在Σ3处观察时,将获得同心圆环型的干涉图像,如图 1c所示。其中每一个亮环或者暗环的半径记为R。
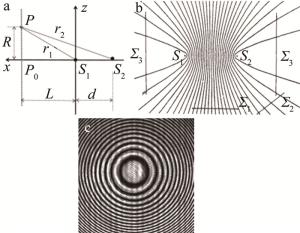
图 1 点光源非定域相干叠加原理
Figure 1. Principle of nonlocalized coherent superposition of point light sources
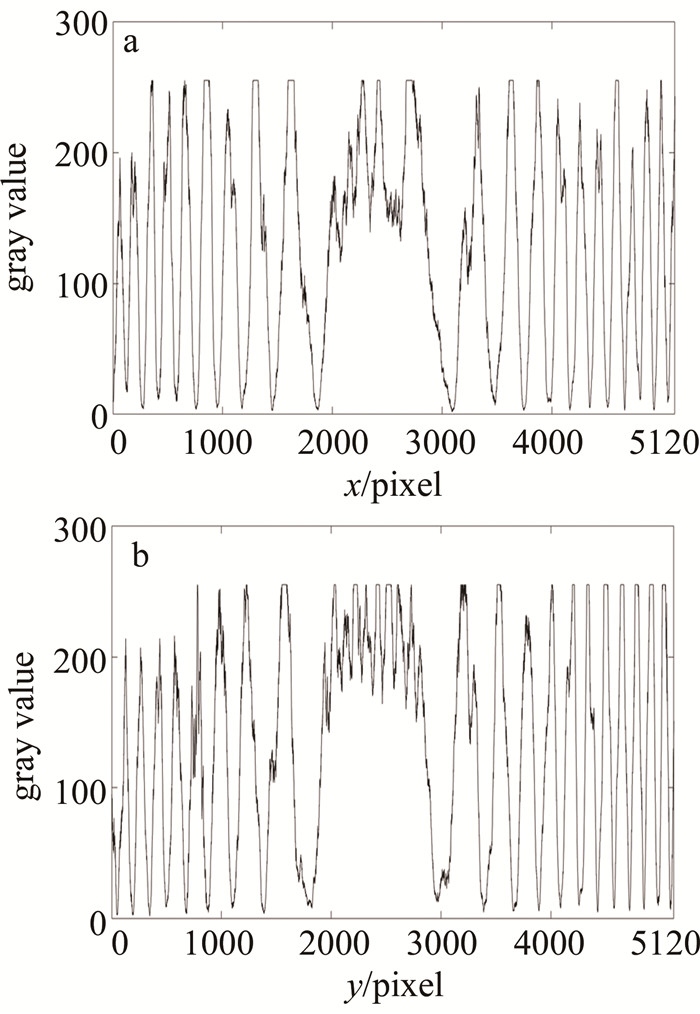
图 1c所示的图像在参考圆心(x0, y0)处沿水平x方向和竖直y方向上的强度轮廓线分别如图 2a和图 2b所示。轮廓线显示,实际采集到的干涉图像通常噪声信号非常大,中心区域的分裂尤为严重,条纹锐度较弱,波峰(对应亮环)和波谷(对应暗环)分裂严重,或者存在饱和现象,极值点难以确定。因此,要从这类图片中精确提取每个圆环的圆心和半径,良好的提取算法非常关键。

图 2 实验图像x方向和y方向的强度轮廓线
Figure 2. Intensity contours in the x-direction and y-direction of the experimental images
-
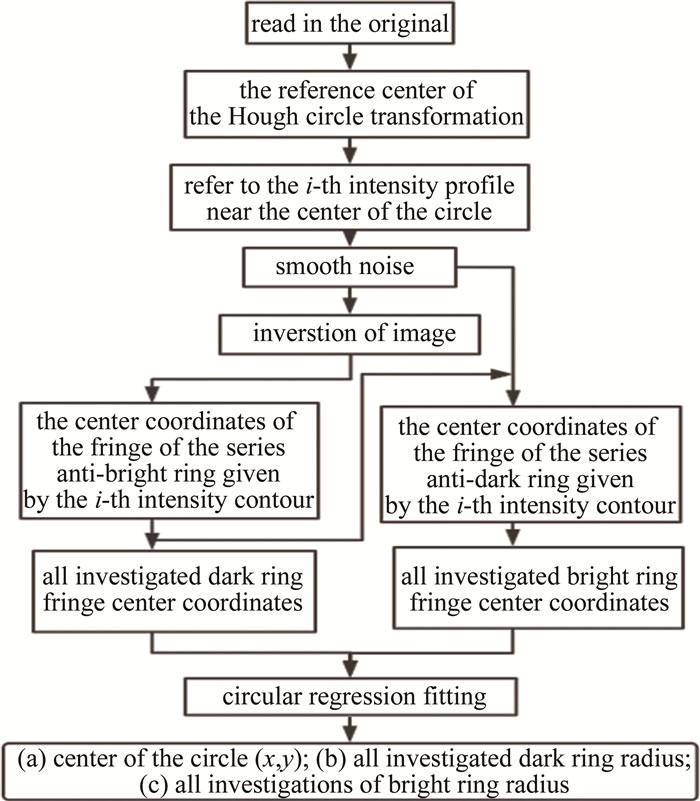
图 2所示的轮廓线中心区域分裂厉害无法定中。传统的处理方式是先对图像进行平滑降噪处理获得中心区域两侧的暗点,然后以这两个暗点为临界点对中心区域进行拟合,获得圆心点; 随后以此向外围依次处理,获得每一个亮环的波峰坐标进而完成后续的圆心和半径提取。这样的方式存在如下问题:一是约50%的暗环信息会丢失;二是中心点单独定中准确度不高。依据实验测试要求,为了充分利用亮环和暗环信息,本文作者设计了一种基于图像取反的圆心和半径提取方法,其过程如图 3所示。基于图像取反的方案,由外围圆环向中心处理的方式获得圆心和半径,可以在兼顾图片全面信息的同时充分利用多圆环参数进行平均提高精度。图像取反的操作有两个作用:其一可以直接对暗环信息进行提取;其二为靠近中心的第一亮环信息提取提供临界参考点。
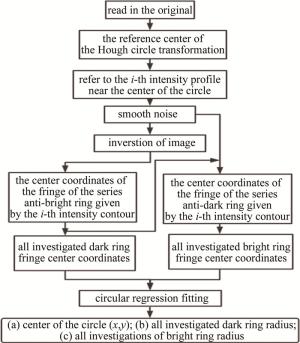
图 3 处理过程
Figure 3. Processing procedure
-
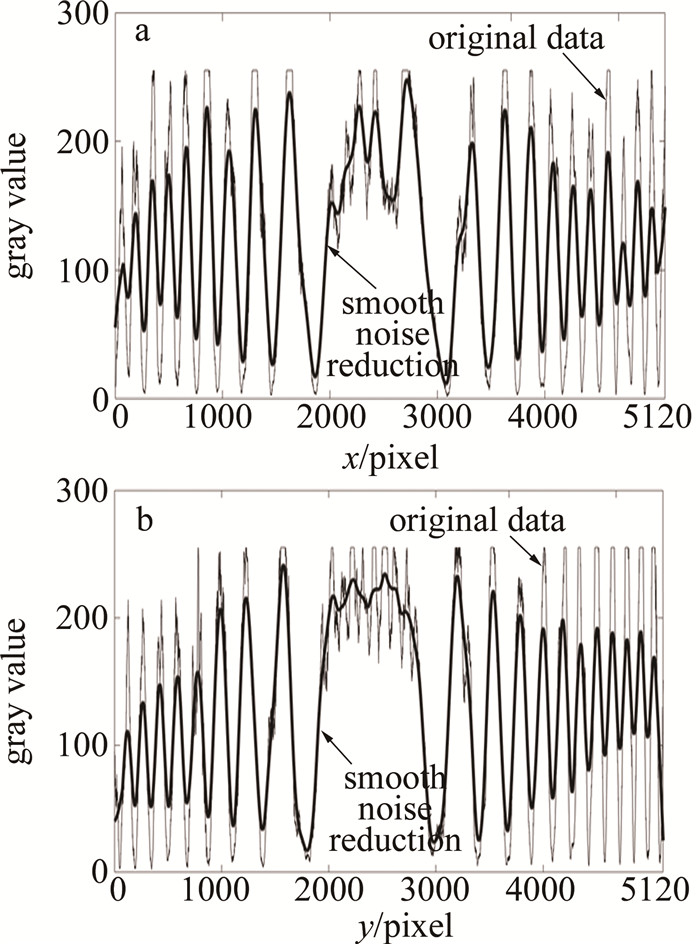
图 4中给出了图 2轮廓线平滑降噪的效果。可以看出,平滑降噪后的曲线除中心区域外,其它波峰和波谷处都实现了单值尖峰结构,同时保持了原曲线的轮廓趋势和峰位位置。

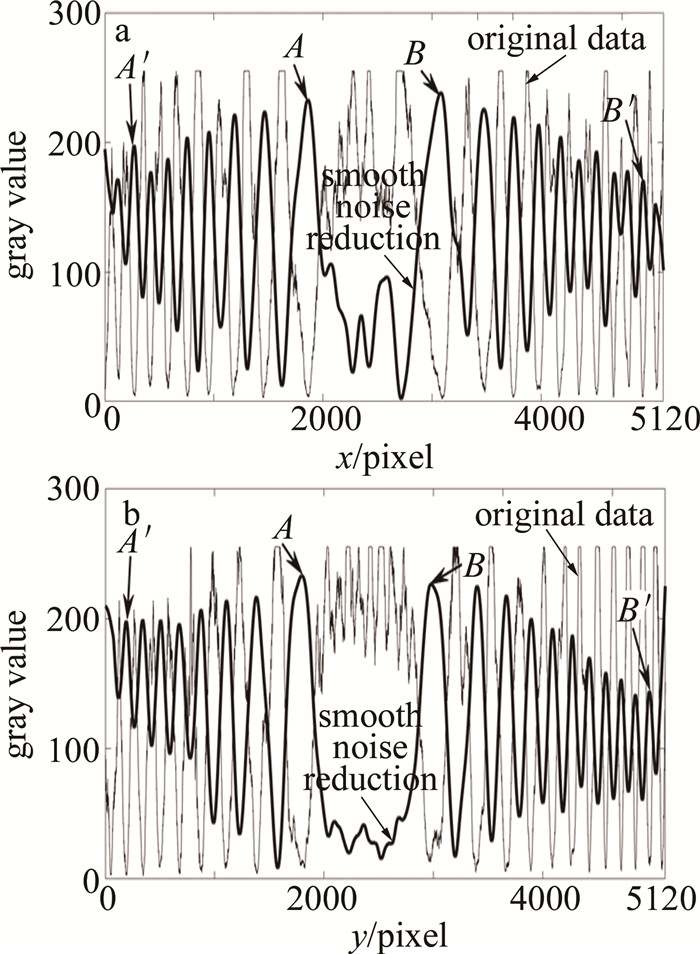
图 5中给出了图 4平滑降噪后曲线的取反效果。图形显示,原来的亮环和暗环虽然发生了上下翻转,但是峰位坐标保持不变。为了描述方便,亮环和暗环概念仍表示原始数据的亮环和暗环,而反亮环和反暗环分别表示取反以后的亮环和暗环,即反亮环对应原始数据的暗环,反暗环对应原始数据的亮环。
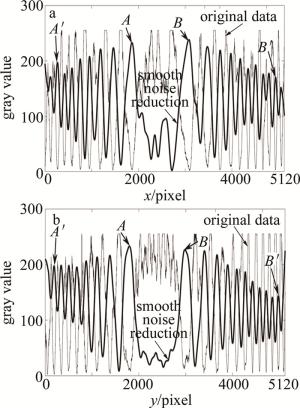
图 5 平滑降噪后曲线x方向和y方向的取反效果
Figure 5. Reversal effect of x-direction and y-direction after smoothing and noise reduction
为了精确提取圆心和半径,在图 5中先获得A和B两个反亮环的坐标,然后在AA′区域和BB′区域上对取反前后的曲线进行处理。对于暗环来说,依次取得两个区域内所有反亮环最大值的坐标,也就是暗环直径坐标;对于亮环来说,A点和B点就是取反前曲线中心区域往外第一亮环起始的暗点位置。这样,依次取得AA′区域和BB′区域内所有亮环最大值的坐标,也就是亮环直径坐标。对所有直径坐标进行纵横坐标有序组合,通过圆回归拟合即可获得每个考察干涉圆环的半径和圆心坐标。其中,所有暗环给出的圆心坐标记为xd和yd,所有亮环给出的圆心坐标为xb和yb。对应同一张同心圆环图片来说,理论上亮环和暗环给出的坐标是同一个点,因此,最终的圆心坐标为x=0.5(xb+xd), y=0.5(yb+yd)。
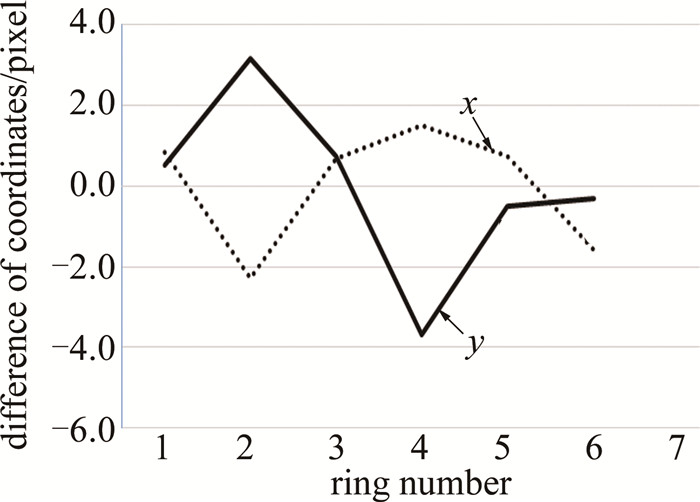
图 5中的强度轮廓线显示, 靠近中心区域的内部几个圆环强度和间隔都比较理想,因此,只考虑靠近圆心的内部3个亮环和3个暗环即可。通过霍夫原变换自动获取考察图像参考圆心(x0, y0),然后,以参考圆心为基础分别在其x方向和y方向上[-50, 50]像素范围内每隔5 pixel取一条强度轮廓线,即每个方向上取21条线,按照图 3所示的过程完成每一个圆环的圆心和半径提取,最后,这些亮环圆心坐标和暗环圆心坐标分组分列在表 1中。为了更清晰地研究各个圆环对应圆心的波动情况,分别求出亮环和暗环各自总的圆心坐标平均值,然后以此为基准求出各个圆环所对应圆心坐标的差值,按照图 1c所示的亮暗顺序排列后如图 6所示。由表 1和图 6可知,3个亮环和3个暗环各自的圆心坐标非常接近,相对于总平均值的最大偏差为-3.7 pixel,即相对于平均值的最大相对偏差为-0.15%,重复性很好,这表明本文中的平滑降噪和取反方法具有良好的可行性。
表 1 图 1c内部3个亮环和3个暗环的回归半径和圆心坐标
Table 1. Regression radius and circle center coordinates of three inner bright rings and three dark rings of Fig. 1c
circle 1/pixel circle 2/pixel circle 3/pixel average value/pixel overall mean/pixel bright ring x 2467.0 2470.8 2467.7 2468.5 2468.5 dark ring x 2469.1 2466.7 2469.5 2468.4 bright ring y 2391.8 2384.9 2388.3 2388.3 2386.6 dark ring y 2389.1 2389.3 2388.1 2388.9 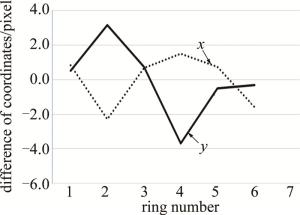
图 6 圆心坐标波动曲线
Figure 6. Circular center coordinate fluctuation curve
研究显示,非定域干涉同心圆环中每一环的半径R与其离开中心点的序数N之间存在如下式所示的关系
$ R_N{}^2=\alpha N $
(1) (1) 式中: α为常数系数。由此可知,相邻两个圆环半径平方比值与对应序数之比成正比。将表 2中的半径值R都按照图 1c所示的明暗位置排列, 首先确定相邻圆环序数之比Rr(后一个圆环比前一个圆环),然后对半径的平方取比值Rs(后一个圆环比前一个圆环),最后取半径平方比值与序数比值的相对误差E,如表 2所示。比较结果显示,圆回归拟合后圆环半径的准确性很好,相对误差在-4.18%~0.36%之间。
表 2 相邻圆环之间半径平方比值的关系
Table 2. Relationship between the radius square ratios of adjacent rings
dark ring 1 bright ring 1 dark ring 2 bright ring 2 dark ring 3 bright ring 3 R/pixel 598.7 828.8 1003.3 1153 1275.8 1400.1 ring number 0.5 1 1.5 2 2.5 3 Rr 2.000 1.500 1.333 1.250 1.200 Rs 1.916 1.465 1.321 1.224 1.204 E/% -4.18 -2.31 -0.70 -2.05 0.36 -
提出了一种基于图像取反兼顾暗环和亮环信息的同心圆环干涉图像圆心和半径提取方法,平滑降噪过程使强度曲线除中心区域外,其它亮环和暗环处都实现了单值尖峰结构,同时保持了原曲线的轮廓趋势和峰位位置。图像取反过程可同时获取暗环和亮环的信息,提高了图像信息利用率,多圆环参数平均过程提高了提取精度。结果表明,靠近中心3个亮环和3个暗环各自的圆心坐标非常接近,相对总平均值的最大偏差为-3.7 pixel,重复性很好;相邻两个圆环半径平方比值相对于实际比值的误差在-4.18%~0.36%之间变化,初步达到了检测要求。
基于图像取反的同心圆环半径和圆心提取方法
The method to extract concentric ring radius and circle center based on image inversion
-
摘要: 为了解决非定域干涉同心圆环图像的圆心和半径的精确提取问题, 提出了一种基于图像取反的暗亮环兼顾的算法, 以点光源非定域干涉同心圆环为对象, 在平滑降噪预处理基础上, 利用霍夫圆变换获得参考圆心, 以参考圆心为基础分别在其x方向和y方向上[-50, 50]像素范围内每隔5 pixel取一条强度轮廓线, 每一条强度轮廓线取反后, 分别实现暗环和亮环峰位坐标的精确识别, 再利用圆回归拟合得到系列圆心和半径, 通过系列圆心和半径的平均运算实现图像最终圆心和半径的精确提取。结果表明, 靠近中心的3个亮环和3个暗环各自的圆心坐标非常接近, 相对于总平均值的最大偏差为-3.7 pixel, 即相对于总平均值的最大相对偏差为-0.15%, 重复性很好; 相邻两个圆环半径平方比值相对于实际比值的误差在-4.18%~0.36%之间变化, 验证了算法的可行性。该研究对实现自动化检测、提高测量精度是有帮助的。Abstract: Aiming at the problem of accurate extraction of circle center and ring radius in non-localization interference concentric ring image, taking point light source non-localization interference concentric rings as the object, an algorithm based on image inversion for simultaneous caring of both dark and bright rings was proposed. The reference center was obtained using the Hough circle transformation after the pre-processing of smooth noise reduction. Then intensity outlines with an interval of 5 pixels in the range of [-50, 50] pixels in its x-direction and y-direction, respectively, were taken. With the inversion of each intensity contour line, accurate identification of dark and bright ring peak coordinates, respectively, was achieved. Finally, the accurate extraction of the circle center and radius of the image was achieved by averaging multiple circle parameters after circle regression fitting of obtained series circle center and radius. The results show that the center coordinates of the three bright rings and the three dark rings are very close to each other and have good reproducibility with the maximum deviation of -3.7 pixels to the mean value, i.e., a maximum relative deviation from the mean is -0.15%. The relative error of the radius-square ratio of two adjacent rings to the actual ratio varies between -4.18% and 0.36%, verifying the feasibility of the algorithm. This research is helpful in realizing automatic detection and improving measurement accuracy.
-
图 1 点光源非定域相干叠加原理
Figure 1. Principle of nonlocalized coherent superposition of point light sources
图 2 实验图像x方向和y方向的强度轮廓线
Figure 2. Intensity contours in the x-direction and y-direction of the experimental images
图 5 平滑降噪后曲线x方向和y方向的取反效果
Figure 5. Reversal effect of x-direction and y-direction after smoothing and noise reduction
表 1 图 1c内部3个亮环和3个暗环的回归半径和圆心坐标
Table 1. Regression radius and circle center coordinates of three inner bright rings and three dark rings of Fig. 1c
circle 1/pixel circle 2/pixel circle 3/pixel average value/pixel overall mean/pixel bright ring x 2467.0 2470.8 2467.7 2468.5 2468.5 dark ring x 2469.1 2466.7 2469.5 2468.4 bright ring y 2391.8 2384.9 2388.3 2388.3 2386.6 dark ring y 2389.1 2389.3 2388.1 2388.9  下载: 导出CSV
下载: 导出CSV
表 2 相邻圆环之间半径平方比值的关系
Table 2. Relationship between the radius square ratios of adjacent rings
dark ring 1 bright ring 1 dark ring 2 bright ring 2 dark ring 3 bright ring 3 R/pixel 598.7 828.8 1003.3 1153 1275.8 1400.1 ring number 0.5 1 1.5 2 2.5 3 Rr 2.000 1.500 1.333 1.250 1.200 Rs 1.916 1.465 1.321 1.224 1.204 E/% -4.18 -2.31 -0.70 -2.05 0.36
下载: 导出CSV
-
[1] 谈宜东, 徐欣, 张书练, 等. 激光干涉精密测量与应用[J]. 中国激光, 2021, 48(15): 1504001. TAN Y D, XU X, ZHANG Sh L, et al. Precision measurement and application of laser interferometry[J]. Chinese Journal of Lasers, 2021, 48(15): 1504001(in Chinese). [2] 龚文慧, 张雄星, 康家雯, 等. 级联FPI-MZI复合干涉光纤传感器双参数特性研究[J]. 激光技术, 2022, 46(5): 618-623. GONG W H, ZHANG X X, KANG J W, et al. Research on dual-parameter characteristics of composite interference fiber sensor based on cascade FPI-MZI[J]. Laser Technology, 2022, 46(5): 618-623(in Chinese). [3] 马亚云, 赵冬娥, 张斌, 等. 共路外差干涉测量液晶空间光调制器相位特性[J]. 激光技术, 2021, 45(5): 614-619. MA Y Y, ZHAO D E, ZHANG B, et al. Measurement of the phase characteristics of liquid crystal spatial light modulator based on common-path heterodyne interferometry[J]. Laser Technology, 2021, 45(5): 614-619(in Chinese). [4] 马丽丽, 牛明生, 苏富芳, 等. 基于单平行分束器的偏光干涉系统[J]. 激光技术, 2020, 44(3): 382-387. MA L L, NIU M Sh, SU F F, et al. Polarization interference system based on single polarization parallel beam splitter[J]. Laser Techno-logy, 2020, 44(3): 382-387(in Chinese). [5] 周国全, 段玉婕, 朱增旺, 等. 基于等倾干涉与图像处理算法的流体折射率测量传感系统[J]. 物理与工程, 2021, 31(6): 17-34. doi: 10.3969/j.issn.1009-7104.2021.06.004 ZHOU G Q, DUAN Y J, ZHU Z W. Sensing system for measuring refractive index of fluid based on new image processing algorithms and equal-inclination interference technique[J]. Physics and Engineering, 2021, 31(6): 17-34(in Chinese). doi: 10.3969/j.issn.1009-7104.2021.06.004 [6] 张晓华, 高晓娟, 赫玉会, 等. 牛顿环条纹几何参数的自动视觉检测[J]. 中国测试, 2023, 49(3): 41-46. ZHANG X H, GAO X J, HE Y H, et al. Automatic vision detection of geometric parameters in Newton's ring fringe[J]. China Measurement & Test, 2023, 49(3): 41-46(in Chinese). [7] 周世南, 沈小燕, 李东升, 等. F-P标准具多光束干涉成像实现微小角度自校准测量[J]. 光子学报, 2022, 51(4): 0412007. ZHOU Sh N, SHEN X Y, LIU D Sh, et al. Self-calibration correction measurement of micro-angle based on F-P etalon multi-beam interfe-rence imaging[J]. Acta Photonica Sinica, 2022, 51(4): 0412007(in Chinese). [8] 郭东琴, 陈文博, 张胜海. 迈克耳孙干涉仪非定域干涉条纹分析[J]. 大学物理, 2020, 39(3): 39-43. GUO D Q, CHEN W B, ZHANG Sh H. Analysis of the non-localized interference fringes produced by Michelson interferometer[J]. College Physics, 2020, 39(3): 39-43(in Chinese). [9] 中国计量大学. 基于分波面干涉同心圆环的角度自溯源高精度测量方法: 114964057[P]. 2022-08-30. CHINA JILIANG UNIVERSITY. High-precision angle tracing mea-surement method based on divide-wave interference concentric ring: 114964057[P]. 2022-08-30(in Chinese). [10] 中国计量大学. 一种量块双端面无研合自溯源光学干涉测量方法: 114993189[P]. 2022-08-30. CHINA JILIANG UNIVERSITY. A non-research self-traceable optical interferometry method for measuring block double end faces is presented: 114993189[P]. 2022-08-30(in Chinese). [11] 刘逸飞, 苏亚, 姚晓天, 等. OCT无创血糖检测图像处理最优化方法研究[J]. 激光技术, 2023, 47(2): 178-184. LIU Y F, SU Y, YAO X T, et al. An optimization method of image processing for OCT non-invasive blood glucose detection[J]. Laser Technology, 2023, 47(2): 178-184(in Chinese). [12] 薛瀚宸, 童童, 张俊武, 等. 基于MATLAB图像处理的光学干涉实验测量研究[J]. 物理与工程, 2022, 32(5): 133-137. XUE H Ch, TONG T, ZHANG J W, et al. Research on optical interference experiment measurement based on MATLAB image processing[J]. Physics and Engineering, 2022, 32(5): 133-137(in Chinese). [13] 高铭锷, 袁鹤, 徐敏, 等. 激光干涉条纹特征提取及定中测量技术研究[J]. 光子学报, 2022, 51(2): 0212002. GAO M E, YUAN H, XU M, et al. Research on feature extraction of laser interference fringe and centering measurement technology[J]. Acta Photonica Sinica, 2022, 51(2): 0212002(in Chinese). [14] 李忠明, 唐延甫, 李俊霖, 等. 迈克尔逊干涉条纹位移信息提取研究[J]. 电子测量技术, 2021, 44(5): 51-54. LI Zh M, TANG Y F, LI J L, et al. Research on displacement information extraction from Michelson interference fringes[J]. Electronic Measurement Technology, 2021, 44(5): 51-54(in Chinese). [15] 张瑞峰, 刘畅. 分区间曲线拟合的干涉条纹中心点提取方法[J]. 激光与光电子学进展, 2021, 58(8): 0812002. ZHANG R F, LIU Ch. Interference fringe center point extraction method based on interval curve fitting[J]. Laser & Optoelectronics Progress, 2021, 58(8): 0812002(in Chinese). [16] 王刃, 张本昀, 朱新慧. 视频激光干涉牛顿环中心的实时提取技术[J]. 武汉大学学报(信息科学版), 2006, 31(11): 1031-1033. WANG R, ZHANG B Y, ZHU X H. Real time picking-up center point of video laser newton's ring[J]. Journal of Wuhan University(Information Science Edition), 2006, 31(11): 1031-1033(in Chinese). [17] 梅启升, 王敏, 周群. 多噪声干涉条纹图像的检测方法[J]. 激光与光电子学进展, 2019, 56(12): 1210007. MEI Q S, WANG M, ZHOU Q. Method for detecting multi-noise interference fringe images[J]. Laser & Optoelectronics Progress, 2019, 56(12): 1210007(in Chinese). [18] TOWER D P, JUDGE T R, BRYANSTON-CROSS P J. Automatic interferogram analysis techniques applied to quasi-heterodyne holo-graphy and ESPI[J]. Optics and Lasers in Engineering, 1986, 14(4/5): 239-281. [19] 沈常宇. 光学原理[M]. 第2版. 北京: 清华大学出版社, 2017: 104-108. SHEN Ch Y. Principles of optics[M]. 2nd ed. Beijing: Tsinghua University Press, 2017: 104-108(in Chinese). [20] 张光寅. 激光束干涉法测平行平晶楔角和它的一些推广应用[J]. 物理, 1974(2): 119-122. ZHANG G Y. Measurement of wedge angle of parallel flat crystal by laser beam interferometry and some applications of it[J]. Physics, 1974(2): 119-122(in Chinese). -

 点击查看大图
点击查看大图
计量
- 文章访问数: 2045
- HTML全文浏览量: 1199
- PDF下载量: 16
- 被引次数: 0
