 网站地图
网站地图

 下载:
下载:

-
在光电探测及跟踪设备,特别是扫描式激光雷达中,2维扫描系统是必不可少的重要组成部分[1-4]。目前,主流的2维扫描系统是由两个45°反射镜及控制其绕水平和垂直两轴转动的电机构成,以实现出射光束扫描, 该结构相对复杂,不利于整体系统集成。而通过控制两个背对同轴放置的楔形棱镜绕轴转动,理论上可实现在一定空间范围内出射光束的任意扫描,且结构灵巧紧凑、调节快速、光束指向精度受机械传动误差的影响小,能够满足目前多个领域的实际应用需求[1, 5-6]。所以,近年来对双楔形棱镜结构的光束传输特性的研究持续受到科研和工程技术人员的关注。2008年,YANG利用光线追迹法导出了双棱镜旋转角度与光线出射角度的复杂解析式[7]。同年,LIU等人设计了能在水平和垂直方向进行光束粗调的旋转双棱镜光束扫描系统[8-10]。2009年,WEI等人利用几何光学和光的标量衍射理论,对旋转双光楔的2维扫描轨迹进行了研究分析[11]。2011年,LI利用光线追迹法对双棱镜光束指向问题做了理论分析,导出了精确的反向解析式[12]。2013年,ALEXANDRU等人通过设置旋转双光楔的角度差和速度差实现了不同的扫描模式[13]。同年,ZHOU等人分别用非近轴光线追迹法和1级近轴近似法推导出了光束指向的正反向解析公式,并对两种方法的推导结果做了对比实验[14-15]。2017年,ZHANG等人以1级近轴近似矢量合成方法为基础开展了在旋转双棱镜(Risley棱镜)中轴系角度测量精度与光束指向控制精度关系的相关研究[16]。2020年,LI等人利用1阶近似法和矢量光学法对正反向问题做了分析研究,并针对反向问题验证了两种方法的有效性和精度[17]。2021年,ZHOU等人基于两步法得出两套反向问题解析解[18]。
整理归纳现有文献发现,现有研究旋转双光楔(楔角小于0.1 rad的楔形棱镜)光束指向问题的主要方法有1级近轴近似法、非近轴光线追迹法以及矢量光学合成法等。这些方法虽能够求解出精确的光束指向解析式,但是解的形式很复杂,无法从中获得清晰的参数之间关系,不便用于旋转双光楔系统参数优化及性能分析,而近似解对于大楔角的楔形棱镜又不能适用。同时,现有研究没有结合实际的扫描式激光雷达,特别是探测3维风场、飞机尾流和风切变的测风激光雷达所经常采用的扫描模式,即平面位置显示(plan position indicator, PPI)、距离高度显示(range height indicator, RHI)等做针对性的分析。
本文作者首先采用几何光学理论及方法研究了双楔形棱镜的旋转角度和出射光束指向之间的正反向问题,获得了简单的精确解析关系式;然后对楔形棱镜的折射率和楔角分别进行了优化选取和设计,初步分析了大偏转角时光束压缩效应的影响;最后对旋转双楔形棱镜的正反向扫描性能进行了仿真,并以PPI和RHI扫描模式为例,对双楔形棱镜的旋转方式进行了针对性的分析研究。
-
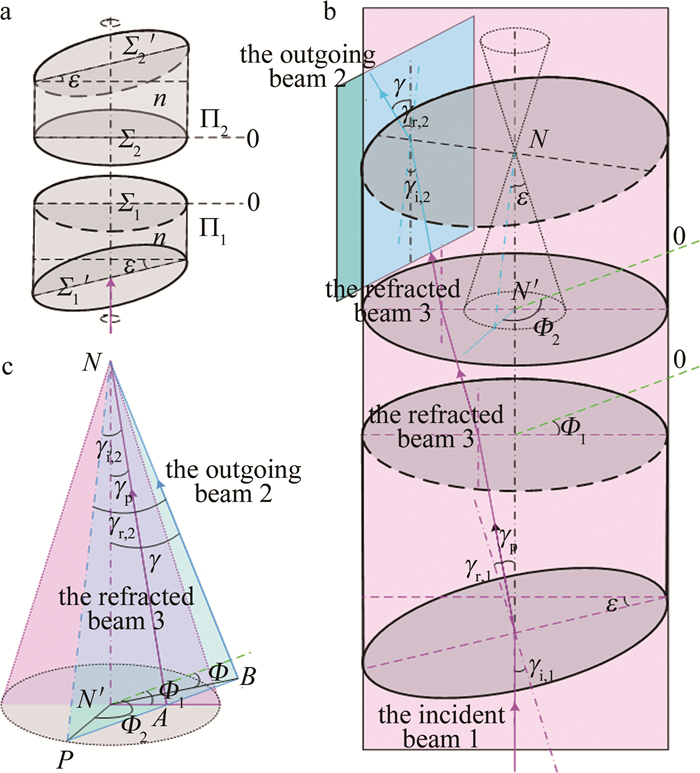
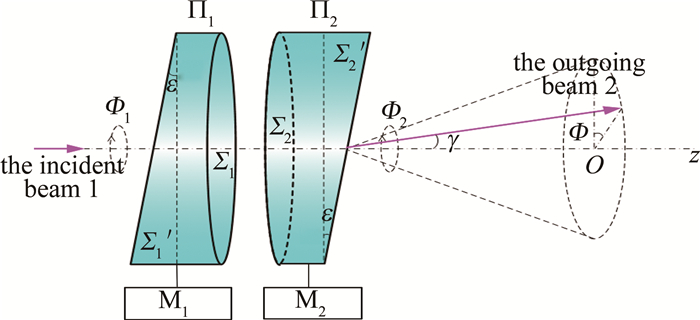
采用旋转双圆楔形棱镜的光束2维扫描系统结构如图 1所示。该系统主要由两个完全相同(楔角为ε,折射率为n)的圆楔形棱镜Π1和Π2及其传动电机M1和M2组成,其中Π1和Π2共轴且垂直于轴线z的两个面Σ1和Σ2, 背对放置,Π1和Π2分别由电机M1和M2控制, 绕轴线z独立转动。入射光束1沿轴线z依次经过Σ1′、Σ1、Σ2和Σ2′ 4个折射面,最后从Π2的倾斜面Σ2′出射。经过分析可知,随着Π1的旋转角Φ1和Π2的旋转角Φ2的变化,出射光束2的天顶角γ和方位角Φ可在一定空间范围内任意变化。
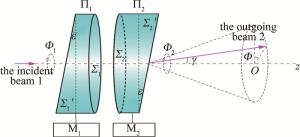
图 1 基于旋转双圆楔形棱镜的光束2维扫描系统结构
Figure 1. Structure of 2-D beam scanning system based on double rotating round wedge prisms
-
旋转双圆楔形棱镜的光束指向正向解析问题为:由楔形棱镜Π1和Π2绕转轴的旋转角Φ1、Φ2,确定出射光束天顶角γ与方位角Φ。如图 2a所示,设定两个倾斜面Σ1′和Σ2′平行时为系统初态,此时Π1和Π2的对称面重合,设该面为零旋转角度面,Φ1=Φ2=0°, 如图 2b所示,利用折射定律可确定光束经由Π1和Π2的完整传播轨迹。对图 2b仔细分析后可得光束在Π1和Π2中传播轨迹的简单模型,如图 2c所示。图 2c中NN′为共轴线,NP为Σ2′面的法线,当Π2绕NN′旋转360°时,NP也将绕NN′旋转360°,此时就会形成一个以NP为母线的圆锥面, AN和BN分别为Σ2′面的入射光束和折射光束。

图 2 旋转双圆楔形棱镜中光束传播轨迹及其简化模型
Figure 2. Beam propagation trajectory and its simplified model in double rotating round wedge prisms
在图 2b中,假设Π1绕轴线NN′转动了角度Φ1,入射光束1沿NN′轴线从Σ1′面入射,入射角γi, 1=ε。根据折射定律及几何关系,经过Σ1′面折射光束3的偏折角γp可表示为:
$ \gamma_{\mathrm{p}}=\gamma_{\mathrm{i}, 1}-\gamma_{\mathrm{r}, 1}=\varepsilon-\arcsin [(\sin \varepsilon) / n] $
(1) 式中,γr, 1为折射角。从图中可知,此时光束的传播平面与设定的零旋转角度面的夹角为Φ1。随后,折射光束3从Σ1面出射,经过Π1和Π2间的平行空气隙后,再入射至Σ2面。在实际工程设计加工过程中,Σ1和Σ2两个面无法做到严格平行,假定该平行误差很小,可忽略其对出射光束角度的影响。显然,折射光束3在经过平行空气隙前后方向未改变,只产生一个与隙厚成正比的平移。假设Σ1和Σ2的间距很小,即隙厚很小,可忽略其所产生的光束平移,进入Π2面的光束仍可用折射光束3表示,即图 2c中的AN。
如图 2c所示,假定Π2绕轴线NN′转动了角度Φ2,折射光束3传播至Σ2′面的入射角和折射角分别为γi, 2和γr, 2,显然有sinγr, 2=nsinγi, 2。图中令$\overline{N N^{\prime}}$= l,BP =a,AP =c,且有∠N′NP=ε,∠N′NA=γp,∠N′NB=γ,∠PNB =γr, 2,∠PNA=γi, 2。在△AN′P和△ANP中采用余弦定理可得:
$ \begin{gathered} c^2=(l \tan \varepsilon)^2+\left(l \tan \gamma_{\mathrm{p}}\right)^2- \\ 2 l^2 \tan \varepsilon \tan \gamma_{\mathrm{p}} \cdot \cos \left({\mathit{\Phi}}_2-{\mathit{\Phi}}_1\right) \end{gathered} $
(2) $ \begin{gathered} c^2=(l / \cos \varepsilon)^2+\left(l / \cos \gamma_{\mathrm{p}}\right)^2- \\ 2 l^2 /\left(\cos \varepsilon \cdot \cos \gamma_{\mathrm{p}}\right) \cdot \cos \gamma_{\mathrm{i}, 2} \end{gathered} $
(3) 联立上述两式得:
$ \cos \gamma_{\mathrm{i}, 2}=\cos \gamma_{\mathrm{p}} \cos \varepsilon+\sin \gamma_{\mathrm{p}} \sin \varepsilon \cos \left({\mathit{\Phi}}_2-{\mathit{\Phi}}_1\right) $
(4) 在△BN′P和△BNP中采用余弦定理得:
$ \begin{gathered} a^2=(l \tan \varepsilon)^2+(l \tan \gamma)^2- \\ 2 l^2 \tan \varepsilon \tan \gamma \cdot \cos \left({\mathit{\Phi}}_2-{\mathit{\Phi}}\right) \end{gathered} $
(5) $a^2=(l / \cos \varepsilon)^2+(l / \cos \gamma)^2-\\ 2 l^2 /(\cos \varepsilon \cos \gamma) \cdot \cos \gamma_{\mathrm{r}, 2} $
(6) 联立上述两式得:
$ \cos \gamma_{\mathrm{r}, 2}=\cos \gamma \cos \varepsilon+\sin \gamma \sin \varepsilon \cos \left({\mathit{\Phi}}_2-{\mathit{\Phi}}\right) $
(7) 在△BNP和△ANP中分别采用正弦定理得:
$ a / \sin \gamma_{\mathrm{r}, 2}=(l / \cos \gamma) / \sin \angle A P N $
(8) $ c / \sin \gamma_{\mathrm{i}, 2}=\left(l / \cos \gamma_{\mathrm{p}}\right) / \sin \angle A P N $
(9) 联立上述两式得:
$ \frac{a}{c}=\frac{\sin \gamma_{\mathrm{r}, 2}}{\sin \gamma_{\mathrm{i}, 2}} \frac{\cos \gamma_{\mathrm{p}}}{\cos \gamma}=\frac{n \cos \gamma_{\mathrm{p}}}{\cos \gamma} $
(10) 在△BNP和△BNA中分别采用正弦定理得:
$ a / \sin \gamma_{\mathrm{r}, 2}=(l / \cos \varepsilon) / \sin \angle A B N $
(11) $ \begin{gathered} (a-c) / \sin \left(\gamma_{\mathrm{r}, 2}-\gamma_{\mathrm{i}, 2}\right)= \\ \left(l / \cos \gamma_{\mathrm{p}}\right) / \sin \angle A B N \end{gathered} $
(12) 联立上述两式得:
$ \frac{a}{c}=\frac{\sin \gamma_{\mathrm{r}, 2} \cos \gamma_{\mathrm{p}}}{\sin \gamma_{\mathrm{r}, 2} \cos \gamma_{\mathrm{p}}-\sin \left(\gamma_{\mathrm{r}, 2}-\gamma_{\mathrm{i}, 2}\right) \cos \varepsilon} $
(13) 联立(10)式、(13)式并化简可得:
$ \cos \gamma=n \cos \gamma_{\mathrm{p}}+\left(\cos \gamma_{\mathrm{r}, 2}-n \cos \gamma_{\mathrm{i}, 2}\right) \cos \varepsilon $
(14) 根据sinγr, 2=nsinγi, 2且γr, 2≤90°,可得:
$ \cos \gamma_{\mathrm{r}, 2}=\sqrt{1-n^2+n^2 \cos ^2 \gamma_{\mathrm{i}, 2}} $
(15) 将上式代入(14)式、(7)式并整理得到如下两式:
$ \begin{gathered} \gamma=\arccos \left[n \cos \gamma_{\mathrm{p}}+\right. \\ \left.\left(\sqrt{1-n^2+n^2 \cos ^2 \gamma_{\mathrm{i}, 2}}-n \cos \gamma_{\mathrm{i}, 2}\right) \cos \varepsilon\right] \end{gathered} $
(16) $ {\mathit{\Phi}}=\left\{\begin{array}{l} {\mathit{\Phi}}_2-\varphi, \left(0 \leqslant {\mathit{\Phi}}_2-{\mathit{\Phi}}_1 \leqslant \pi\right) \\ {\mathit{\Phi}}_2+\varphi-2 \pi, \left(\pi <{\mathit{\Phi}}_2-{\mathit{\Phi}}_1 \leqslant 2 \pi\right) \\ {\mathit{\Phi}}_2+\varphi, \left(0 \leqslant {\mathit{\Phi}}_1-{\mathit{\Phi}}_2 \leqslant \pi\right) \\ {\mathit{\Phi}}_2-\varphi+2 \pi, \left(\pi<{\mathit{\Phi}}_1-{\mathit{\Phi}}_2 \leqslant 2 \pi\right) \end{array}\right. $
(17) 其中:
$ \varphi=\arccos \left(\frac{\sqrt{1-n^2+n^2 \cos ^2 \gamma_{\mathrm{i}, 2}}}{\sin \gamma \sin \varepsilon}-\cot \gamma \cot \varepsilon\right) $
(18) 将(1)式、(4)式代入(16)式,然后再将(1)式、(4)式和(16)式代入(17)式,可先后求得γ(Φ1, Φ2)和Φ(Φ1, Φ2)两个函数关系式。
-
旋转双圆楔形棱镜的光束指向反向解析问题为:由出射光束天顶角γ和方位角Φ,确定双圆楔形棱镜Π1和Π2的旋转角度。为简便起见,设定Φ2-Φ1在[0, π]内变化,则由(16)式得:
$ \cos \gamma_{\mathrm{i}, 2}=\frac{n \cos \varepsilon\left(n^{-2}-1\right)}{2\left(\cos \gamma-n \cos \gamma_{\mathrm{p}}\right)}-\frac{\cos \gamma-n \cos \gamma_{\mathrm{p}}}{2 n \cos \varepsilon} $
(19) 根据(17)式得:
$ \;\;\;\;\;\;\;\;\;\;\;{\mathit{\Phi}}_2=\\ {\mathit{\Phi}}+\arccos \left(\frac{\sqrt{1-n^2+n^2 \cos ^2 \gamma_{\mathrm{i}, 2}}}{\sin \gamma \sin \varepsilon}-\cot \gamma \cot \varepsilon\right) $
(20) 联立(4)式、(19)式可得:
$ \begin{gathered} {\mathit{\Phi}}_2-{\mathit{\Phi}}_1=\arccos \left[\frac{n \cot \varepsilon\left(n^{-2}-1\right)}{2\left(\cos \gamma-n \cos \gamma_{\mathrm{p}}\right) \sin \gamma_{\mathrm{p}}}-\right. \\ \left.\frac{\cos \gamma-n \cos \gamma_{\mathrm{p}}}{n \sin \gamma_{\mathrm{p}} \sin (2 \varepsilon)}-\cot \gamma_{\mathrm{p}} \cot \varepsilon\right] \end{gathered} $
(21) 将(1)式、(19)式代入(20)式,然后再将(1)式、(20)式代入(21)式,可求得Φ2(γ, Φ)和Φ1(γ, Φ)两个函数关系式。
-
由(4)式可发现:
$ \cos \left(\gamma_p+\varepsilon\right) \leqslant \cos \gamma_{\mathrm{i}, 2} \leqslant \cos \left(\gamma_{\mathrm{p}}-\varepsilon\right) $
(22) 当Φ2-Φ1=π时,γi, 2取最大值γp+ε。此时,为确保折射光束3在Σ2′面折射后仍能保持正向传播,须满足如下条件:
$ \sin \left(\gamma_{\mathrm{p}}+\varepsilon\right) \leqslant 1 / n $
(23) 当(23)式取“=”时,折射光束3将在Σ2′面发生临界全反射,此时出射光束2的天顶角γ最大,且γmax= π/2-ε。进一步分析可知,当折射率n和楔角ε的值满足临界全反射条件时,γ的取值范围最大,为[0, γmax]。在临界条件下,将(1)式代入(23)式可得:
$ 4 n^2 \sin ^3 \varepsilon+4\left(n^2-1\right) \sin ^2 \varepsilon-3 \sin \varepsilon-1=0 $
(24) 由(24)式可绘出满足临界条件时,折射率n和棱镜楔角ε的变化关系曲线,如图 3所示。显然,楔角ε随着折射率n的增大而逐渐减小。
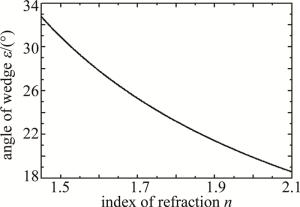
图 3 临界全反射条件下,棱镜楔角随折射率的变化曲线
Figure 3. Curve of prism wedge angle with refractive index under critical condition of total internal reflection
综上分析可知,为获得一个尽可能大的出射光束径向扫描范围,楔角ε和折射率n的取值在满足(23)式的同时,楔角ε应尽可能小;满足(23)式的楔角ε和折射率n近似成反比例变化关系。因此,为获得大的出射光束扫描范围,双楔形棱镜应尽量选择折射率高的材料制作。本文中以直探式测风激光雷达为例,直探式系统常用的3个工作波长分别为355 nm(高层风场探测,以大气分子为探测目标)、532 nm(兼顾高低层风场探测,以大气分子和气溶胶为探测目标)和1064 nm(低层风场探测,以大气气溶胶粒子为探测目标)。假定便携式多普勒激光雷达的发射波长为532 nm,选取肖特公司的LASF35镧系光学玻璃作为楔形棱镜的制作材料,LASF35在532 nm波长的折射率n达到了2.03。由图 3可得,当n=2.03时,楔角ε=19.5°。此时,出射光束2在理想条件下的天顶角变化范围为0°~70.5°,即仰角变化范围为19.5°~90°。
需要指出的是,上述结论是假定入射光束严格平行的理想条件下得出的。然而,实际入射光束具有一定发散角和口径大小,需要考虑大偏转角时光束压缩效应的影响。容易得出,偏转角越大,压缩效应就越明显。初略估算双楔形棱镜的压缩比(入射光斑与出射光斑的垂直截面积之比)RCR为:
$ \begin{gathered} R_{\mathrm{CR}}=\frac{\cos \gamma_{\mathrm{i}, 1}}{\cos \gamma_{\mathrm{r}, 1}} \frac{\cos \gamma_{\mathrm{i}, 2}}{\cos \gamma_{\mathrm{r}, 2}}= \\ \frac{\cos \varepsilon}{\sqrt{1-\sin ^2 \varepsilon / n^2}} \frac{\cos \gamma_{\mathrm{i}, 2}}{\sqrt{1-n^2+n^2 \cos ^2 \gamma_{\mathrm{i}, 2}}} \end{gathered} $
(25) 且有:
$ \Delta \gamma_{\mathrm{r}, 2}=\Delta \gamma_{\mathrm{i}, 1} R_{\mathrm{CR}} $
(26) 式中,Δγi, 1和Δγr,2分别为入射光束发散角和出射光束在折射面上的发散角。RCR越大,表明压缩效应越显著。压缩效应将使出射光束在某些方向上的发散角增大,远场能量分布区域变宽。扫描式测风激光雷达系统一般为收发同置,压缩效应将导致发射和接收视场均增大,一方面造成系统探测远距离区域的空间分辨率降低;另一方面导致系统接收到的天空背景噪声增大,白天探测信噪比有所下降,风速探测误差增大。因此,为避免光束压缩效应对激光雷达探测性能造成大的影响,需合理限定RCR的最大值。
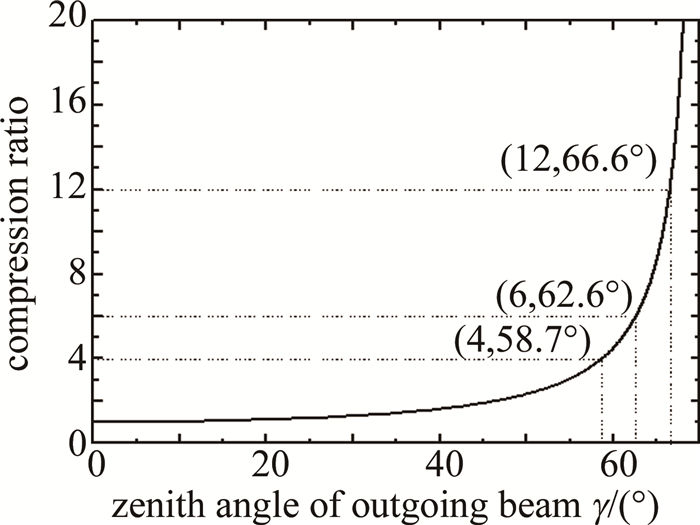
将(19)式代入(25)式后可得RCR与γ的关系,如图 4所示。由图 4可见:随着光束天顶角γ增大,RCR经历了从缓慢增大到迅速增大的过程。实际中,首先构建RCR与具体激光雷达探测性能的关系;然后根据探测性能要求确定RCR的阈值;最后由图 4确定出射光束实际能取得的最大天顶角γmax。例如:假定Δγi, 1=0.5 mrad,若要求Δγr, 2不能超过2 mrad,则RCR不能超过4,由图可得γmax=58.7°;若要求Δγr, 2不能超过3 mrad,则RCR不能超过6,由图可得γmax=62.6°。关于压缩比增大对测风激光雷达探测性能影响问题,后续将深入进行定量仿真研究。
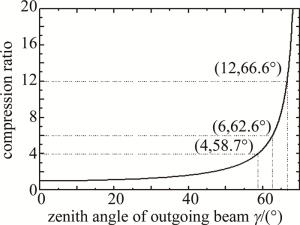
图 4 光束压缩比随出射光束天顶角的变化曲线
Figure 4. Curve of beam compression ratio with zenith angle of outgoing beam
-
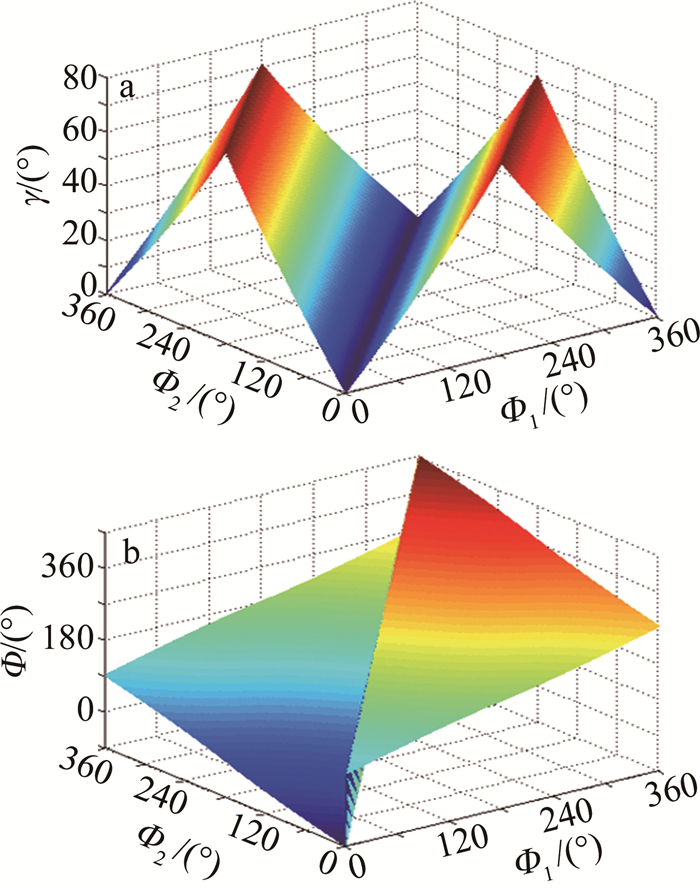
图 5a和图 5b分别是双圆楔形棱镜Π1和Π2的旋转角Φ1和Φ2在0°~360°变化时,出射光束的天顶角γ和方位角Φ随它们变化的3维图。图 5b中出现跳变是因为当Φ2-Φ1=0°时,光束不发生偏转,沿着轴线出射,Φ取任意值;当Φ2-Φ1=0+(无限接近0°的正值)时,Φ=Φ1-90°;当Φ2-Φ1=0-(无限接近0°的负值)时,Φ=Φ1+90°,这在图 6b中更能清楚地看出。从数学角度讲,这是一个奇异点。由图 5可见:当棱镜楔角ε=19.5°、折射率n=2.03时,通过旋转Π1和Π21圈,即Φ1和Φ2在0°~360°范围变化,理论上出射光束的天顶角和方位角可分别在[0°, 70.5°]和[0°, 360°]范围任意变化。

图 5 出射光束天顶角γ与方位角Φ随Π1和Π2的旋转角Φ1和Φ2变化3维图
Figure 5. 3-D diagram of zenith angle γ and azimuth angle Φ of outgoing beam with rotation angles Φ1 and Φ2 of Π1 and Π2
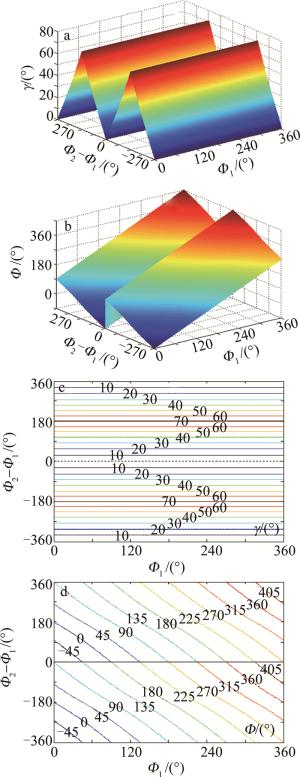
图 6 出射光束天顶角γ与方位角Φ随Φ1及两棱镜的旋转角度差Φ2-Φ1变化图
Figure 6. Variation of zenith angle γ and azimuth angle Φ of outgoing beam with rotation angle Φ1 and rotation angle difference between two prisms Φ2-Φ1
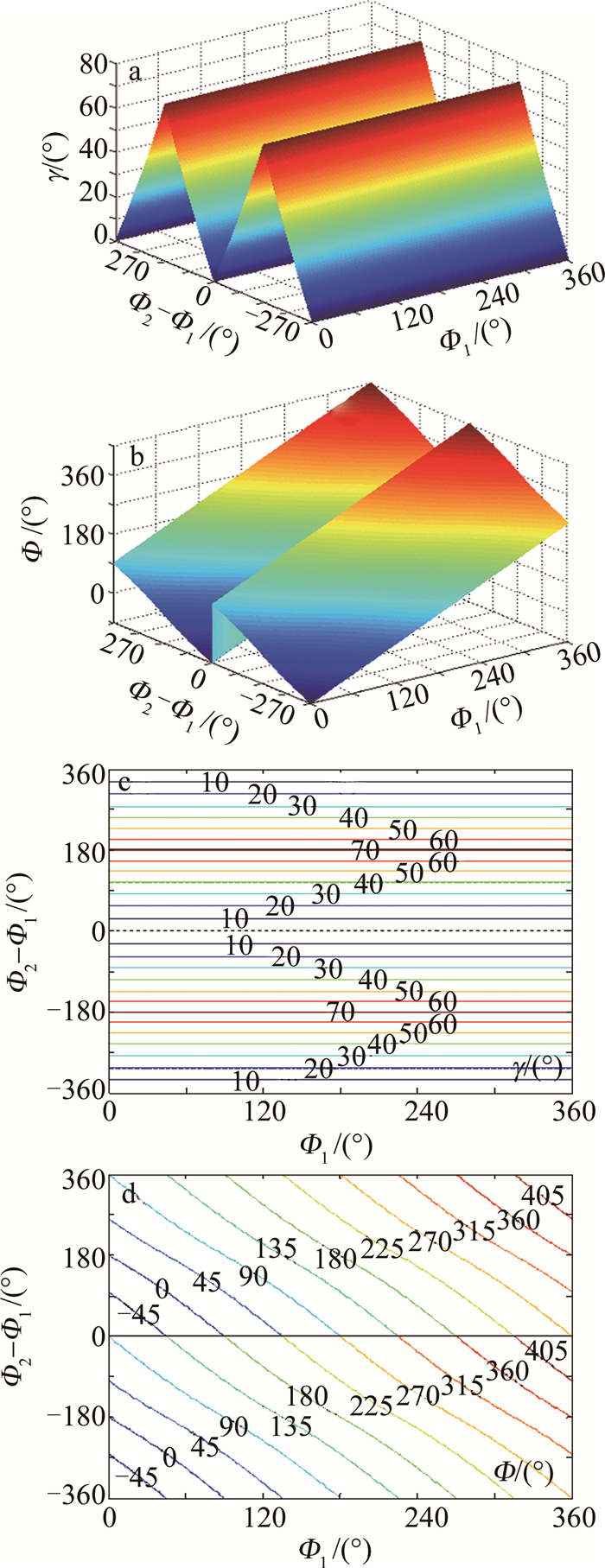
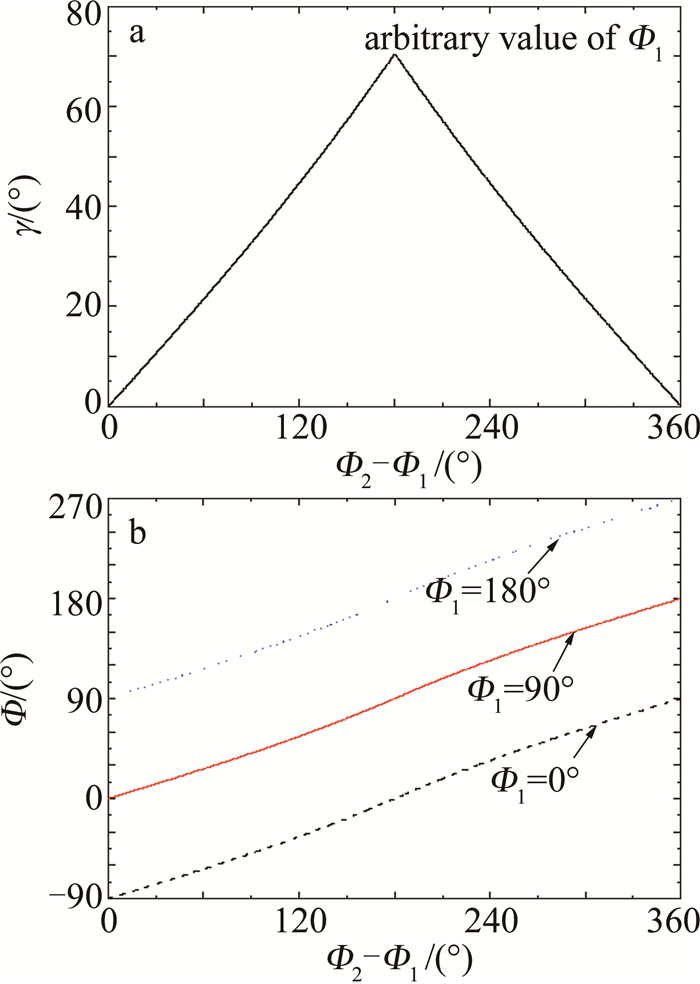
为便于分析入射与出射参数的关系特点,绘制出的出射光束天顶角γ和方位角Φ随Π1的旋转角Φ1及Π1与Π2的旋转角度差Φ2-Φ1变化的3维图分别如图 6a、图 6b所示,相应的等高图如图 6c、图 6d所示。由图 6可知,若限定Φ2-Φ1在[0°, 180°]变化时,并不会影响出射光束天顶角和方位角的变化范围,而且此时出射光束2的天顶角γ和方位角Φ均是Φ1和Φ2的单值单调函数。
图 7a和图 7b中分别给出了出射光束天顶角γ和方位角Φ随两棱镜的旋转角度差Φ2-Φ1的变化曲线。

图 7 出射光束天顶角γ与方位角Φ随两棱镜的旋转角度差Φ2-Φ1的变化曲线
Figure 7. Curve of zenith angle γ and azimuth angle Φ of outgoing beam with Φ2-Φ1
-
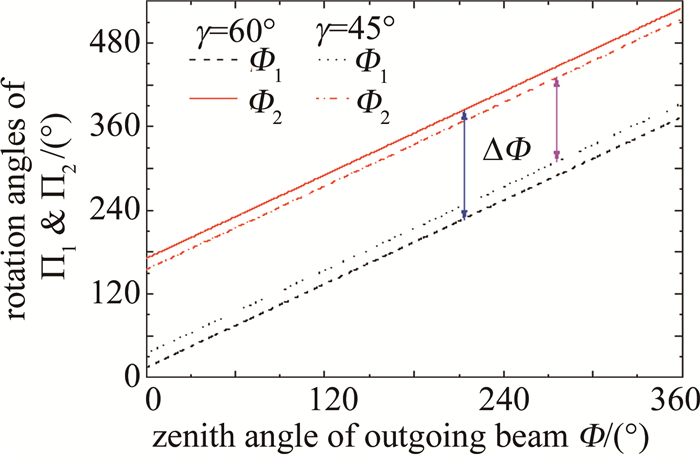
设定不同的扫描仰角,即不同的天顶角γ后,棱镜Π1的旋转角Φ1及棱镜Π2的旋转角Φ2和出射光束方位角Φ的对应变化曲线如图 8所示。由图 8可知:对于确定的γ值,Φ与Φ1、Φ2均呈线性关系,且两棱镜的旋转角度差ΔΦ=Φ2-Φ1为恒定值;ΔΦ随γ的增大而增大, 如当γ为45°和60°时,ΔΦ分别为120.94°和156.47°。实际中,用来控制Π1和Π2转动的两个步进电机M1和M2相同,装在电机M1和M2转轴上的齿轮(主动齿轮)分别与装在棱镜Π1和Π2上的齿轮(被动齿轮)对应啮合,Π1和Π2的主被动齿轮完全相同。在该扫描模式下,由设定的扫描天顶角γ计算得到ΔΦ(γ),先让电机M2驱动Π2转动ΔΦ角度;然后再控制两个电机同速匀速转动,转速ω由光束扫描的周期τ决定,即ω=2π/(τG),其中, G表示主被动轮的齿数比。
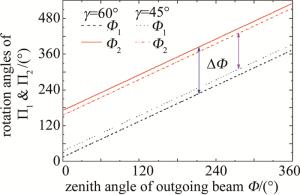
图 8 PPI扫描模式下,不同天顶角γ时,旋转角Φ1、Φ2和方位角Φ的对应变化关系
Figure 8. Variation of rotation angles Φ1 and Φ2 with azimuth angle Φ under different elevation angles γ in PPI mode
-
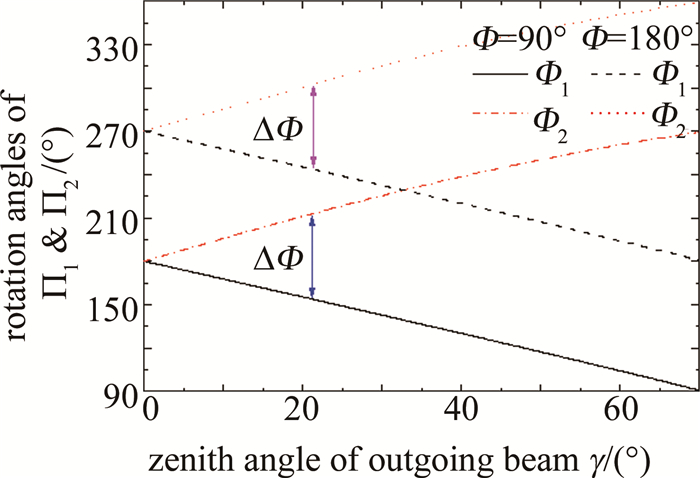
设定不同的扫描方位角Φ后,棱镜Π1的旋转角Φ1及棱镜Π2的旋转角Φ2和出射光束天顶角γ的对应变化曲线如图 9所示。由图 9可知:对于确定的Φ值,γ与Φ1、Φ2均呈近似线性关系;Φ改变时,两条曲线整体上下平移,但曲线形状不变;当Φ从90°增至180°时,两条曲线整体向上平移90°,即曲线上下平移量等于Φ的变化量,且当γ=0°时,Φ1与Φ2相等,均为Φ+90°。所以,在该扫描模式下,当定位精度要求不高时,由选定的扫描方位角Φ,先控制两个传动电机M1和M2同步驱动Π1和Π2旋转Φ+90°;然后再控制M1和M2分别以角速度ω1=K1γmax/(τG)和ω2=K2γmax/(τG)匀速转动,其中γmax为预先设置的最大扫描天顶角,K1、K2分别表示对图 9中曲线γ-Φ1和γ-Φ2线性拟合时的斜率。在本文中选定参数ε=19.5°、n=2.03的情况下,K1=-1.27、K2=1.29,拟合的相关系数R2分别为0.99984和0.99239。K1为负值,代表电机M2反向转动。而当定位精准要求很高时,需对曲线γ-Φ1与γ-Φ2采用二次项拟合,拟合得到R2分别为0.99999和0.99995,更接近1。结果表明,为提高定位精度,需要程序控制步进电机M1和M2作匀变速转动。
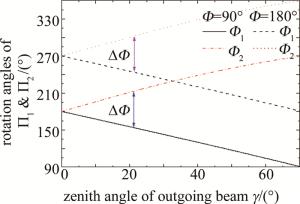
图 9 RHI扫描模式下,不同方位角Φ时,旋转角Φ1、Φ2和天顶角γ的对应变化关系
Figure 9. Variation of rotation angles Φ1 and Φ2 with zenith angles γ under different azimuth angle Φ in RHI mode
-
研究了一种结构紧凑、便于集成、可较大范围快速高精度扫描的2维光学扫描系统。该系统核心部件为两个背对共轴放置、可沿轴线旋转的圆楔形棱镜。通过原理分析,给出了双圆楔形棱镜的旋转角与出射光束方位角及天顶角之间的正反向函数关系式。通过优化选择折射率n=2.03@532 nm的镧系玻璃材料和19.5°的棱镜楔角,理论计算得到出射光束的理想扫描范围为0°~360°方位角及0°~70.5°天顶角。然而,系统在实际工作中,出射光束的最大扫描天顶角不仅取决于楔形棱镜的材料折射率和楔角,同时还受限于光束压缩效应对激光雷达探测性能的影响。深入研究发现:固定出射光束的天顶角,两个圆楔形棱镜的旋转角均与其方位角呈严格线性关系;固定出射光束的方位角,两个圆楔形棱镜的旋转角均与其天顶角呈近似线性关系。研究结果表明,通过步进电机控制双圆楔形棱镜的转动速度及方向可使2维扫描系统的出射光束以PPI、RHI等不同模式作精确扫描。该系统成本低、结构小巧、使用方便,尤其适用于需进行光束扫描测量的各种便携式激光雷达设备,如测量3维矢量风场、垂直风剖面或风切变的便携式测风激光雷达等。
测风激光雷达双棱镜2维扫描系统的光学设计
Optical design of biprism 2-D scanning system for wind LiDAR
-
摘要: 传统的测风激光雷达双反射镜式2维扫描系统体积较大、结构相对复杂, 不利于系统小型一体化集成。基于旋转双圆楔形棱镜, 研究了新型2维光学扫描系统; 分析了系统的工作原理, 推导出了双圆楔形棱镜的旋转角与出射光束方位角及天顶角之间的简单正反向函数关系式, 对楔形棱镜的折射率和楔角进行了优化选取和设计。结果表明, 当工作波长为532 nm、楔形棱镜材料折射率为2.03时, 最优设计楔角为19.5°; 出射光束最大天顶角不仅取决于楔形棱镜折射率和楔角, 还受光束压缩效应的制约。该系统结构紧凑、便于集成, 能实现出射光束大范围和快速高精度的扫描, 也能实现测风激光雷达以平面位置显示、距离高度显示等光束扫描模式工作。Abstract: 2-D scanning system with double mirrors of a traditional wind light detection and ranging(LiDAR) was large in volume and complex in structure, which was not conducive to the small-scale integration of the system. A new 2-D optical scanning system based on rotating double circular wedge prism was studied. The working principle of the system was analyzed, and the simple forward and inverse functional relationship between the rotation angle of the double circular wedge prism and the azimuth and zenith angle of the outgoing beam was derived. The refractive index and wedge angle of the wedge prism were optimized and designed. The results show that when the working wavelength is 532 nm and the refractive index of wedge prism material is 2.03, the optimal wedge angle is 19.5°. The maximum zenith angle of the outgoing beam depends not only on the refractive index and wedge angle of the wedge prism, but also on the beam compression effect. The system is compact and easy to integrate, and large-scale, fast and high-precision scanning of the outgoing beam can be realized. The wind LiDAR can also work in beam scanning modes such as plane position display and distance height display.
-
图 1 基于旋转双圆楔形棱镜的光束2维扫描系统结构
Figure 1. Structure of 2-D beam scanning system based on double rotating round wedge prisms
图 2 旋转双圆楔形棱镜中光束传播轨迹及其简化模型
Figure 2. Beam propagation trajectory and its simplified model in double rotating round wedge prisms
图 3 临界全反射条件下,棱镜楔角随折射率的变化曲线
Figure 3. Curve of prism wedge angle with refractive index under critical condition of total internal reflection
图 4 光束压缩比随出射光束天顶角的变化曲线
Figure 4. Curve of beam compression ratio with zenith angle of outgoing beam
图 5 出射光束天顶角γ与方位角Φ随Π1和Π2的旋转角Φ1和Φ2变化3维图
Figure 5. 3-D diagram of zenith angle γ and azimuth angle Φ of outgoing beam with rotation angles Φ1 and Φ2 of Π1 and Π2
图 6 出射光束天顶角γ与方位角Φ随Φ1及两棱镜的旋转角度差Φ2-Φ1变化图
Figure 6. Variation of zenith angle γ and azimuth angle Φ of outgoing beam with rotation angle Φ1 and rotation angle difference between two prisms Φ2-Φ1
图 7 出射光束天顶角γ与方位角Φ随两棱镜的旋转角度差Φ2-Φ1的变化曲线
Figure 7. Curve of zenith angle γ and azimuth angle Φ of outgoing beam with Φ2-Φ1
图 8 PPI扫描模式下,不同天顶角γ时,旋转角Φ1、Φ2和方位角Φ的对应变化关系
Figure 8. Variation of rotation angles Φ1 and Φ2 with azimuth angle Φ under different elevation angles γ in PPI mode
-
[1] 沈法华, 蒋佳佳, 周慧. 一种基于单轴旋转双圆楔形棱镜的便携式激光雷达二维扫描系统及扫描方法: 中国, CN202210034312.9[P]. 2022-07-15. SHEN F H, JIANG J J, ZHOU H. A portable lidar two-dimensional scanning system and scanning method based on a single axis rotating bicircular wedge prism: CN202210034312.9[P]. 2022-07-15(in Chinese). [2] 朱峻可, 李丽娟, 林雪竹. 激光雷达测量系统的测量场规划研究[J]. 激光技术, 2021, 251(1): 99-104. ZHU J K, LI L J, LIN X Zh. Research on the measurement field planning of lidar measurement system[J]. Laser Technology, 2021, 45(1): 99-104(in Chinese). [3] 梁晓峰, 张振华. 浅析舰船激光测风雷达技术应用及发展趋势[J]. 激光技术, 2021, 45(6): 768-775. LIANG X F, ZHANG Zh H. Application and development trend of shipborne wind lidar[J]. Laser Technology, 2021, 45(6): 768-775(in Chinese). [4] LU S, GAO M, YANG Y, et al. Inter-satellite laser communication system based on double Risley prisms beam steering[J]. Applied Optics, 2019, 58(27): 7517-7522. doi: 10.1364/AO.58.007517 [5] 范大鹏, 周远, 鲁亚飞, 等. 旋转双棱镜光束指向控制技术综述[J]. 中国光学, 2013, 6(2): 136-150. FAN D P, ZHOU Y, LU Y F, et al. A review of pointing control techniques for rotating biprism beams[J]. Chinese Optics, 2013, 6(2): 136-150(in Chinese). [6] 高飞, 王苗. 双光楔光轴指向调整技术[J]. 光电工程, 2018, 45(11): 60-66. GAO F, WANG M. Double optical wedge axis pointing adjustment technology[J]. Opto-Electronic Engineering, 2018, 45(11): 60-66(in Chinese). [7] YANG Y. Analytic solution of free space optical beam steering using Risley prisms[J]. Journal of Lightwave Technology, 2008, 26(21): 3576-3583. doi: 10.1109/JLT.2008.917323 [8] LIU L R, LUAN Z, WANG L, et al. Large-optics white light interferometer for laser wavefront test: Apparatus and application[J]. Proceedings of the SPIE, 2008, 7091: 70910Q. doi: 10.1117/12.793515 [9] LIU L R, WANG L, LUAN Z, et al. The mechanical design of the large-optics double-shearing interferometer for the test of the diffraction-limited wave front[J]. Proceedings of the SPIE, 2008, 7091: 70910S. doi: 10.1117/12.793954 [10] SUN J, LIU L, YUN M, et al. The effect of the rotating double-prism wide-angle laser beam scanner on the beam shape[J]. International Journal for Light and Electron Optics, 2005, 116(12): 553-556. doi: 10.1016/j.ijleo.2005.01.040 [11] 韦中超, 熊言威, 莫玮, 等. 旋转双光楔折射特性与二维扫描轨迹的分析[J]. 应用光学, 2009, 30(6): 939-943. doi: 10.3969/j.issn.1002-2082.2009.06.011 WEI Zh Ch, XIONG Y W, MO W, et al. Analysis of refraction characteristics and two-dimensional scanning trajectory of rotating double optical wedge[J]. Journal of Applied Optics, 2009, 30(6): 939-943(in Chinese). doi: 10.3969/j.issn.1002-2082.2009.06.011 [12] LI Y. Closed form analytical inverse solutions for Risley prism based beam steering systems in different configurations[J]. Applied Optics, 2011, 50(22): 4302-4309. [13] ALEXANDRU S, MARIUS T, VIRGIL-FLORIN D, et al. Modeling of Risley prisms devices for exact scan patterns[J]. Proceedings of the SPIE, 2013, 8789: 878912. [14] 周远, 鲁亚飞, 黑沫, 等. 旋转双棱镜光束指向解析解[J]. 光学精密工程, 2013, 21(6): 1373-1379. ZHOU Y, LU Y F, HEI M, et al. The rotating biprism beam points to the analytical solution[J]. Optical and Precision Engineering, 2013, 21(6): 1373-1379(in Chinese). [15] 周远, 鲁亚飞, 黑沫, 等. 旋转双棱镜光束指向的反向解析解[J]. 光学精密工程, 2013, 21(7): 1693-1700. ZHOU Y, LU Y F, HEI M, et al. Inverse analytical solution of rotating biprism beam pointing[J]. Optical and Precision Engineering, 2013, 21(7): 1693-1700(in Chinese). [16] 张鲁薇, 王卫兵, 王锐, 等. 基于正解过程的Risley棱镜光束指向控制精度分析[J]. 中国光学, 2017, 10(4): 507-513. ZHANG L W, WANG W B, WANG R, et al. Analysis of beam pointing control precision of Risley prism based on forward solution process[J]. Chinese Optics, 2017, 10(4): 507-513(in Chinese). [17] 李锦英, 陈科, 彭起, 等. 旋转双棱镜大范围快速高精度扫描技术[J]. 光电技术应用, 2020, 35(2): 44-48. LI J Y, CHEN K, PENG Q, et al. Rotating double prism scanning technology with large range and high accuracy[J]. Electro-Optic Technology Application, 2020, 35(2): 44-48(in Chinese). [18] 周远, 陈英, 蒋国保, 等. 旋转双棱镜目标跟踪的非线性问题分析[J]. 光学学报, 2021, 41(18): 1823002. ZHOU Y, CHEN Y, JIANG G B, et al. Nonlinear problem analysis of rotating biprism target tracking[J]. Acta Optica Sinica, 2021, 41(18): 1823002(in Chinese). -

 点击查看大图
点击查看大图
计量
- 文章访问数: 3801
- HTML全文浏览量: 2676
- PDF下载量: 24
- 被引次数: 0
