 网站地图
网站地图

 下载:
下载:







-
紫外光通信作为一种新型的通信方式,具有架设简捷灵活、隐蔽性和抗干扰能力强、非视距通信等优点[1],这些优点使得紫外光通信适用于多种近距离抗干扰通信环境,是满足军事战场通信要求的理想手段[2]。非视距紫外光通信是通过大气中的微粒对紫外光散射作用进行数据传输的新型通信方式,然而由于强烈散射这一显著特点引起了多径效应和码间干扰,造成了很高的误比特率(bit error rate, BER)[3-4]。作者通过使用一种延迟判决的最小均方(least mean square, LMS)信道估计方法进行信道跟踪,再通过最大似然估计(maximum likelihood estimation, MLE)均衡算法计算每一次路径转移过程中转移特征函数来选取最优路径,以达到直接消除码间干扰的目的,提高系统通信性能。同时,利用延迟判决的方法来进行紫外光信道的更新,研究了紫外光通信中基于信道估计的MLE算法,探讨了延时深度对通信性能的影响。MLE均衡器作为一种性能最优的均衡器,具有很高的研究价值,但是却具有复杂度高和工程实现困难的缺点[5-6]。作者通过对MLE改进算法的研究,设计出一种适合紫外光通信的MLE均衡器,对MLE均衡器的工程实现起到了指导作用。
-
本文中选用常用的非直视(non-line of sight, NLOS)紫外光单次散射通信模型[7-10]来进行建模,光子从发射到接收的整个传输过程中只受到了一次大气散射作用[11]。由于非直视紫外光通信属于短距离通信,满足单次散射模型。通过计算分析接收端靠单次散射接收到的能量和时间的函数关系,得到信道的脉冲响应h(t)[12]为:
$ h\left( t \right) = \frac{{{k_{\rm{s}}}{\theta _{\rm{r}}}\theta _{\rm{t}}^2\sin \left( {{\beta _{\rm{r}}} + {\beta _{\rm{t}}}} \right)\exp \left( {-{k_{\rm{e}}}ct} \right)}}{{4{\pi ^3}r\sin {\beta _{\rm{t}}}\left( {1-\cos {\theta _{\rm{t}}}} \right)}} $
(1) 式中, c为光速,t为时间,θr为接收端的半视场角,βr为接收端顶角,θt为发射端光束的发散角,βt为发射端顶角,ks为大气散射系数,ke为大气衰减系数,r为收发间距。
-
紫外光通信的码间干扰(inter symbol interference, ISI)信道可以看作是有限脉冲响应(finite impulse response, FIR)滤波器,相应的信道模型图如图 1所示。图中,z-1表示延迟。
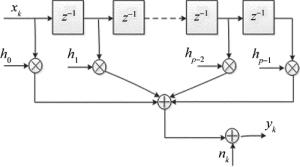
Figure 1. An inter symbol interference channel model for ultraviolet communication
紫外光通信的信道长度p是有限长的,由图 1可看出,信道输出符号yk依赖当前数据输入符号xk和已传输的后(p-1)个数据符号{xk-1,xk-2,…,xk-p+1}。所以接收到的信号可写作:
$ {y_k} = \sum\limits_{p = 0}^{p-1} {{h_p}{x_{k-p}} + {n_k}} $
(2) 式中,nk是背景噪声,如果在发射端并没有采用光学放大器件,nk可以忽略不计,对于以下的讨论中,都以二进制开关键控(on-off keying, OOK)调制为例。
-
紫外光发射机发射符号序列{X}在通过图 1中的码间干扰信道模型后, 通过MLE算法进行最佳符号序列的判决,假设发射机发射的符号序列{X}已知,yk间彼此相互独立,从而得到整个接收序列{Y}的条件概率, 则整个接收序列{Y}的似然函数[13]为:
$ \begin{array}{l} f\left( {Y|X} \right) = \prod\limits_{k = 0}^{k-1} {f\left( {{y_k}|{x_k}, {x_{k-1}}, \cdots, {x_{k-p + 1}}} \right)} = \\ \;\;\;\;\;\;\;c\exp \left( { - \frac{1}{{{n_0}}}\sum\limits_{k = 1}^{k - 1} {{{\left| {{y_k} - \sum\limits_{p = 0}^{p - 1} {{h_p}{x_{k - p}}} } \right|}^2}} } \right) \end{array} $
(3) 最大似然函数可以等价于发射序列{X}的最小价值函数:
$ M\left( X \right) = \sum\limits_{k = 1}^{k-1} {{{\left| {{y_k}-\sum\limits_{p = 0}^{p-1} {{h_p}{x_{k - p}}} } \right|}^2}} $
(4) 在MLE准则下的最佳符号序列为M(X)最小时, 对应的序列为:
$ {\left\{ X \right\}_{{\rm{MLE}}}} = \arg \mathop {\min }\limits_{\left\{ X \right\}} M\left( X \right) $
(5) -
在启用自适应算法之前,首先要在发射端发射一个短的训练序列对紫外光非直视通信信道做一个最初的估计,对信道估计器的抽头系数做初始调整。LMS-MLE结构框图见图 2。k-1时信道状态为:
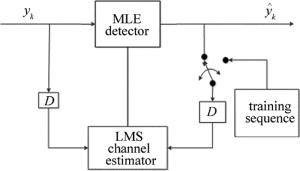
Figure 2. LMS-MLE principle block diagram using time delay decision
$ s_{k-1}^{\left( n \right)} = \left\{ {x_{k-1}^{\left( n \right)}, x_{k-2}^{\left( n \right)}, \cdots, x_{k - p + 1}^{\left( n \right)}} \right\} $
(6) 以下为算法执行过程。
(1) 对所有状态点的累积度量值进行比较,获取最优幸存序列。计算k-1时从状态sk-1(n)出发,当且仅在k时刻到达m,状态k时刻转移到状态sk(m)的度量计算为:
$ M_k^{\left( {n \to m} \right)} = {\left| {{y_k}- {{\left[{\left( {{h_{k-1}}\left( n \right)} \right.} \right]}^{\rm{T}}}s_{k -1}^{\left( n \right)}} \right|^2} $
(7) 对于所有的2p-1个传输可能所对应的幸存路径的相应状态sk-1(n0)为:
$ s_{k-1}^{\left( {{n_0}} \right)} = {\left( {M_k^{\left( {n \to m} \right)}} \right)_{{\rm{MLE}}}} = \arg \mathop {\min }\limits_{s_{k-1}^{\left( n \right)}} \left( {M_k^{\left( {n \to m} \right)}} \right) $
(8) 即可得到最终的判决信息为:
$ {\hat y_k} = {h_{k-1}} \cdot s_{k-1}^{\left( {{n_0}} \right)} $
(9) 式中,n0表示最优序列。
(2) 使用判决延迟和LMS算法对信道参量进行更新:若延迟量为D,对于当前延迟后的信道参量hk-D并不代表当前的信道条件,其误差信号可以表示为:
$ {e_{k-D}} = {y_{k-D}}-{h_{k - D}}{\hat x_{k - d}} $
(10) 式中, ${\hat x_{k-d}}$表示判决后数据的延迟输出, d表示D的重复迭代过程。那么最终得到的信道估计输出为:
$ \hat h = {h_{k-d}} + \mu {e_{k-D}}{\left( {{{\hat x}_{k-d}}} \right)^{\rm{T}}} $
(11) 式中,μ为步长因子, T表示矩阵的转置。在判决过程中,随着延迟量的增大,判决的可靠性增强,系统的跟踪性能也降低,但是信道估计随着延迟增加不能及时地进行信道跟踪,所以要在保证可靠性的同时,合理地选择延迟量,这里的判决器更新系数为某个码元周期后的输入信号。
-
基于信道估计的判决延迟算法与常规的LMS算法相比,延迟算法使用的并不是当前的误差信号和接收信号,而是经过延迟器延迟后的误差信号和接收信号来进行信道预测和权系数更新,通过对延迟算法的性能分析,延迟量D的引入对算法的稳态影响不大,但是对步长因子μ的选取相比传统LMS算法的步长因子选取(0 < μ < 2/λmax)更为苛刻,它的收敛条件为[14]:
$ 0 < \mu < \frac{2}{{{\lambda _{\max }}}}\sin \left[{\frac{\pi }{{2\left( {2D + 1} \right)}}} \right] $
(12) 式中,λmax表示输入信号自相关函数的最大特征值,是一个常数。随着延迟量的增大,为保证算法收敛,μ的取值为保证系统收敛的上限值。如图 3所示, 随着延迟量的增加,μ逐渐减小,各种近似的误差也逐渐增大。所以在算法运行中,要根据不同的延迟深度选择合适的步长值。
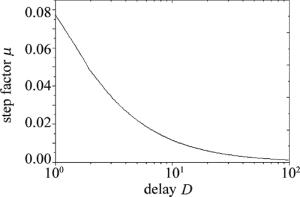
Figure 3. Relationship between step factor and delay
-
下面分析不同步长时算法的收敛特性,采用判决延迟的MLE算法性能主要依赖信道估计的差错,跟LMS算法的输入向量的自相关矩和收敛速度相关[15]。如图 4所示,步长因子μ越大,收敛速度越快,但是越小,信道估计的差错越小,所以μ的选取最好是在满足收敛要求的前提下尽可能取最小值。
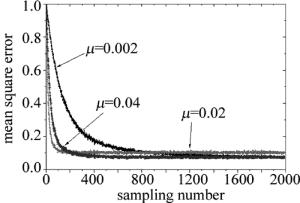
Figure 4. Relationship between mean square and sampling number
-
通过对NLOS紫外光单次散射通信模型和信道模型分析,紫外光散射通信信道是一个FIR信道,信道越长,码间干扰就越严重[16],为了消除码间干扰,提高通信性能,作者对基于信道估计的半盲MLE均衡算法的进行研究,应用在紫外光通信中进行仿真,仿真条件如下:通信距离为200m,发射功率为1mW,发散角为15°,视场角为30°,发射仰角与接收仰角都设定为60°,算法延迟量为20。
-
从图 5中可以看出,这种采用延迟判决法带信道估计的MLE均衡器在信噪比(singnal-to-noise ratio, SNR)大于12dB时,对紫外光非视距通信系统性能有很大的改善,并且均衡器的性能与传统的最优MLE算法更为结近。其优点是:对于紫外光这种慢变信道,可以很好地进行信道跟踪,实现盲均衡,并且信道估计后的信道长度和已知的信道长度基本相同,所以算法复杂度并没有增加。
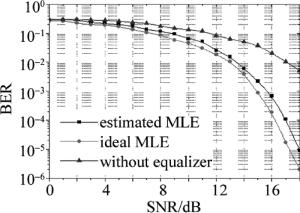
Figure 5. Performance comparison of equalization algorithms in ultraviolet communication
-
目前紫外光通信的主要调制方式为OOK和脉冲相位调制(pulse phase modulation, PPM),在给定系统模型的情况下, 紫外光通信系统中使用两种调制方式对均衡算法进行仿真,从图 6可以看出, PPM调制算法性能与OOK调制的性能相似。尽管PPM调制方式相比OOK调制方式可以在相同的平均光功率情况下达到更高的通信速率,而且信息是通过光脉冲时隙所在位置来传递的,是一种具有信道抗干扰能力的正交调制技术,非常适合紫外光通信,但是MLE均衡是通过接收信号的条件概率密度函数来检测系统的最佳符号序列,在不同的调制方式下,序列的最大似然函数是不变的。
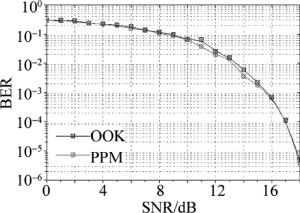
Figure 6. The influence of different modulation methods on the performance of the algorithm
-
紫外光通信信道是一个相对稳定的慢变信道,所以可以取得较好的均衡效果。采用判决延迟的信道估计方法,实现对紫外光通信中的信道信息的及时更新。通过图 7可知,在延迟量选取为0~20时,由于紫外光通信中相对稳定的慢变信道,BER的变化并不大; 延迟量从20增加到50的过程中,由于信道更新不及时,引入的差错随着延迟量的增大不断累积,导致BER急剧上升; 延迟量大于50时,系统已无法进行正常通信。图中的3条曲线代表不同SNR时,BER随延迟深度的变化,可以看出,SNR的变化,对延迟深度的变化趋势并没有产生很大影响,只是提升了系统的误码性能。
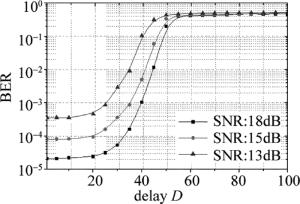
Figure 7. Relationship between BER and delay with different SNR
图 8中是SNR为18dB时,通信距离与延迟深度的关系。可以看出,随着通信距离的增大,系统的BER也随着提高,而在同一距离下,随着判决延迟的增加,系统的BER也随之提升,但是在延迟量D < 20的时候,延迟量变化对系统的影响并不大,因此,在紫外光通信中,选取尽可能大的延迟量(D=20),这样既可以完成信道的跟踪,又保证了判决过程的可靠性。
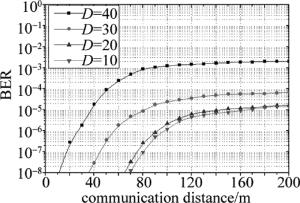
Figure 8. Relationship between communication distance and delay depth
-
对紫外光通信中的信道均衡技术进行了研究,使用延迟判决的LME算法作为信道估计器,再利用MLE均衡算法消除信号传输过程中的码间干扰。本文中分析了均衡系统的性能,仿真结果表明:均衡系统可以明显提升紫外光的通信性能,由于调制方式的不同并没有改变接收信号的条件概率密度函数,所以调制方式对均衡系统的性能影响不大。误比特率对延迟量的选择没有影响,而相同通信距离下,延迟量越大,通信性能越差。通过分析得出, 紫外光通信中延迟量选取为20时,既可以满足通信过程中的信道跟踪,又可以保证判决可靠性。
适用于紫外光通信的延迟判决均衡算法
Equalization algorithm with delayed decision suitable for UV communication
-
摘要: 为了消除紫外光通信过程中强烈散射所引起的码间干扰,采用一种带信道估计的最小均方误差-最大似然估计(LMS-MLE)延迟判决均衡算法进行了理论分析和仿真验证。通过选取合适的判决延迟深度来调整LMS自适应滤波器抽头系数进行信道跟踪,获取新的信道估计向量,最后利用MLE均衡算法得到最优序列输出。结果表明, 该算法可以明显提升紫外光通信系统的性能,在没有提高复杂度的情况下,性能接近最优MLE均衡算法,并且可以实现信道跟踪, 紫外光通信中算法的最佳延迟量取值为20。这一结果对紫外光通信性能提升以及MLE均衡器的工程实现是有帮助的。Abstract: In order to eliminate inter symbol interference caused by strong scattering in ultraviolet communication, one delay decision equalization algorithm based on least mean square-maximum likelihood estimation (LMS-MLE) with channel estimation was adopted. The theoretical analysis and simulation verification were carried out. The appropriate decision delay depth was selected to adjust the LMS adaptive filter tap coefficient for channel tracking, and to obtain a new channel estimation vector. Finally, the optimal sequence output was obtained by using the MLE equalization algorithm. The results show that, the algorithm can obviously improve the performance of ultraviolet communication system. Without increasing the complexity, the performance is close to the optimal MLE equilibrium algorithm. And the channel tracking can be achieved. The optimal delay of the algorithm in ultraviolet (UV) communication is 20. This result is helpful for improving the performance of UV communication and engineering implementation of MLE equalizer.
-
Figure 5. Performance comparison of equalization algorithms in ultraviolet communication
Figure 6. The influence of different modulation methods on the performance of the algorithm
-
[1] DONG K. Research on UV scattering communication[J]. Proceedings of the SPIE, 2013, 8906:12-14. [2] FAN Y W. Application of ultraviolet communication in military communication system. Digital Communications World, 2017(11):31-35(in Chinese). [3] KE X Zh, DENG L J. Wireless optical communication [M].Beijing: Science Press, 2016:58-61(in Chinese). [4] XU Zh Y, DING H P. Analytical performance study of solar blind non-line of sight ultraviolet short-range communication link[J].Optical Letters, 2008, 33(16):1860-1862. doi: 10.1364/OL.33.001860 [5] DORMAN G, SADOT D, GORSH A. Enhanced equalization based on a combination of reduced complexity MLSE and linear equalizer for heavily ISI-induced signals: US, 009825785B2[P].2017-11-21. [6] LEVY O, KATZ G, GORSH A, et al. Blind channel estimation method for an MLSE receiver in high speed optical communication channels: US, 009768914B2[P].2017-09-19. [7] WANG X F, ZHANG X, ZHANG J Zh. Ultraviolet light atmospheric scattering propagation model based on monte carlo method[J]. Laser & Optoelectronics Progress, 2017, 54(11):110102. [8] ZHANG J. Atmospheric channel model along with coding and decoding design for NLOS ultraviolet communication[D]. Guilin: Guilin University of Electronic Science and Technology of China, 2007: 18-28(in Chinese). [9] ZHAO T F, YU X X, ZHANG Y. Path fast recovery algorithm of inter clusters for UV NLOS communication[J].Laser Journal, 2017, 41(5):728-733(in Chinese). [10] ZHAO T F, WANG X F, LIU Y. Research on modulations of helicopter landing using ultraviolet guiding technology in atmospheric turbulence[J].Laser Technology, 2017, 41(3):411-415(in Chinese). [11] GONG J M, ZHAGN Zh J, XING R P, et al. Error performance analysis of separated dual-pulse pulse position modulation for ultraviolet communication[J].Semiconductor Optoelectonics, 2017, 38(5):725-729(in Chinese). [12] LUO Ch, LI J Y, CHEN X M. Wireless ultraviolet communication channel analysis[J]. Progress in Laser and Optoelectronics, 2011, 48(4):040602(in Chinese). doi: 10.3788/LOP [13] HUANG Z. MLSE equalizer for UV NLOS communication[J]. Computer Engineering, 2012(20):72-75(in Chinese). [14] LONG G, LING F, PROAKIS J G. The LMS algorithm with delayed coefficient adaptation[J].IEEE Transactions on Signal Processing, 1989, 37(9):1397-1405. doi: 10.1109/29.31293 [15] SONG Z Y, PENG Sh L, ZHAO R. A variable step-size LMS algorithm based on piecewise error function in visible light communication[J]. Journal of Signal Processing, 2017, 33(4):551-557. [16] LUO Ch. Research on signal processing and baseband system design for NLOS communication[D].Beijing: Institute of Greduate of CAS, 2011: 65-90(in Chinese). -

 点击查看大图
点击查看大图

图(8)
计量
- 文章访问数: 8444
- HTML全文浏览量: 6160
- PDF下载量: 90
- 被引次数: 0
