 网站地图
网站地图

 下载:
下载:






-
随着海洋开发和利用的发展需求,水声通信技术的研究和开发越来越受到人们关注。声波在水下传输衰减很小,为水下数据传输提供较好的解决方案。激光超声信号具有声脉冲窄、频谱范围宽、灵活机动等优点,受水声信道有限带宽的限制,语音信号直接数字化不适合水声信道传输应用。如果采用语音识别技术将语音信息转换为文本/字符进行传输,则通信速率将可以降低至100bit/s以下[1]。语音交互是最本质、最自然、最直接的表现形式,语音传递信息是人类交流中最重要、最有效和最方便的交换手段,语音识别技术根据对说话人的依赖程度,可以分为特定人识别与非特定人识别[2],非特定人识别的识别对象为任何人,应用范围广泛且实用性强。因此,作者提出基于非特定人语音识别控制的激光超声水下遥感方案,分析语音信号字符化编码技术,研究可变基频的幅移键控(amplitude shift keying, ASK)激光调制方式[3],探讨利用语音识别与控制实现水下遥感的技术方案,为实现激光声水下通信和目标遥感提供一种新的技术途径。
-
激光在液体中产生声波的特性取决于激光特性、液体特性以及光声信号的激发机制,根据液体表面层吸收的能量密度不同,激光诱导超声的机理主要有热膨胀、表面汽化和光击穿3种方式。当加载控制信号的激光脉冲与水介质相互作用时,在水面下一定距离的激光辐射区域液体吸收光能量而发生光声效应,产生方向各异的激光声脉冲,将空间光传输转换为水下声传输,通过水下一定范围内的水听器接收和系统处理解调,可完成空中到水下的信息传输与目标控制。实验证明,汽化机制的效率可达1%,光击穿的转换效率可达10%~30%,热膨胀机制的效率则低于0.01%[4-6]。
激光脉冲在水中激发声波随着激光的波长、脉冲宽度、到达水下的光束直径不同,其能量大小、密度及光声转换效率也不相同,激光在水中激发声波的机制随之改变。当激光脉冲辐射的能量密度较小时,激光声信号的激发机理是热膨胀[7-8]。对于理想情况下的均匀流体(以水为例),热膨胀机制下,激光激发声波的非齐次波动方程可表示为[9]:
$ {\nabla ^2}p - \frac{1}{{{c^2}}}\frac{{{\partial ^2}p}}{{\partial {t^2}}} = - \frac{\beta }{{{c_p}}}\frac{{\partial H\left( {x, y, z, t} \right)}}{{\partial t}} $
(1) 式中,▽2是拉普拉斯算子,p为声压,c为水下声速,β为体积热膨胀系数,cp为水的比热容,H(x, y, z, t)为单位时间单位体积液体吸收并转换成的热量密度,与激光和作用液体煤质的特性密切相关。
热膨胀机制下,假设激光脉冲加热区域是一个小球体,则得到声压脉冲的表达式为[10]:
$ \begin{array}{l} p\left( {r, t} \right) = - \frac{{\beta {E_{\rm{a}}}{c^3}}}{{{{\left( {2{\rm{ \mathsf{ π} }}} \right)}^{3/2}}{c_p}r_0^3}}\frac{1}{r}\left( {t - \frac{r}{c}} \right) \times \\ \;\;\;\;\;\;\;\exp \left\{ { - {{\left[ {\frac{c}{{{r_0}}}\left( {t - \frac{r}{c}} \right)} \right]}^2}} \right\} \end{array} $
(2) 式中,Ea为吸收的激光总能量;r0为激光加热区的半径;r表示激光脉冲作用位置到观测点的距离。该式表示的激光声脉冲波形是一个双极性脉冲,在正脉冲后面紧跟着一个负脉冲,正负脉冲幅度均为[11]:
$ {p_{\rm{m}}} = \frac{{\beta {E_{\rm{a}}}{c^2}{{\rm{e}}^{ - \frac{1}{2}}}}}{{{{\left( {2{\rm{ \mathsf{ π} }}} \right)}^{\frac{3}{2}}}{c_p}r_0^2r}} $
(3) -
针对大功率脉冲激光器驱动要求,采用语音进行实时控制,首先通过语音识别方法,将要传输的语音(汉字和字符)指令转换为代码并进行语音信号字符化,输出符合驱动激光器的编码与逻辑门电路(transistor-transistor logic, TTL)电平方式。系统所用的大功率激光器属于上升沿触发,因此采用占空比50%的TTL电平归零码实现,当编码脉冲由“0”到“1”跳变时,控制激光器发射激光,实现ASK形式的激光调制。
用单极性二进制基带信号s(t)控制激光脉冲[12],如果P(t)表示激光信号的功率,则ASK调制[13]后的单基频激光声信号可以表示为:
$ {e_{{\rm{ASK}}}}\left( t \right) = s\left( t \right)P\left( t \right) $
(4) 式中,
$ s\left( t \right) = \sum\limits_{n = - \infty }^\infty {{a_n}g\left( {t - nT} \right)} $
(5) 式中, an为第n个码元,T为码元周期;g(t)为某种脉冲波形。P(t)受控于s(t)而得到已调信号,如果基带信号s(t)的频率固定不变,则激光器的脉冲频率固定不变[14-15];如果s(t)的频率是变化的,则激光脉冲P(t)随着变化,形成可变基频ASK调制。可变基频调制激光脉冲信号的表达式如下:
$ {e_{{\rm{ASK}}}}\left( t \right) = \sum\limits_{i = - \infty }^\infty {\sum\limits_{j = - \infty }^\infty {{a_j}P\left[ {t - jT\left( {j, i} \right)} \right]} } $
(6) 基频ASK调制的激光超声传输系统属于低速数据传输,收/发端通信采用群同步异步传输,这种方式每个字符以起始位和停止位加以区分,码组间采用异步定时,而码元间采用同步定时,帧与帧之间设置帧间隙,用于接收端抽样判决。可变基频的编码设置为多帧结构,每帧设置不同基频频率,每帧长共11位,由水声传感接收的声信号形式与激光发射的ASK调制信号具有一致性。
-
基于语音识别控制的激光超声水下遥感系统包括语音识别与编码、激光器与光学系统、接收与译码和模拟目标控制模块几部分组成,激光声水下遥感系统如图 1所示。语音识别与编码部分负责语音信号采集、匹配和字符化的基带编码,然后由微控制单元(microcontroller unit,MCU)对发送指令的字符化数据进行信源编码,输出可变基频编码信号驱动激光器,并利用水介质的光声互作用产生激光超声信号,由水听器采集接收并译码以实现水下目标遥感。
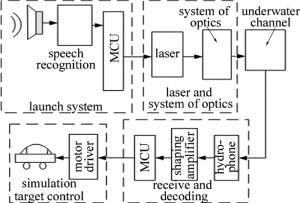
Figure 1. System chart of underwater remote sensing
-
系统硬件设计包括发射端电路、放大整形电路、接收端译码及目标控制电路。发射端电路信号连接示意图如图 2所示。
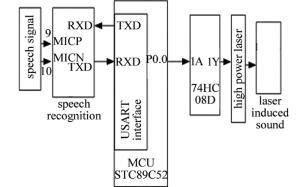
Figure 2. Block diagram of the transmitting end
图中主控MCU接收指令数据并进行可变基频编码,通过I/O端口P0.0发送编码数据经“逻辑与”电路驱动激光器,实现激光ASK脉冲调制。图中,RXD(receive data)为接收数据,TXD(transmit data)为发送数据,MICP(microphone positive)为麦克风正极,MICN(microphone negative)为麦克风负极, USART(universal synchronous asynchronous receiver transmitter)为通用同步异步收发, 1A与1Y分别为一对输入和输出引脚。
接收端通过水听器采集激光声信号并转换为电信号,图 3所示为接收端信号电路连接。
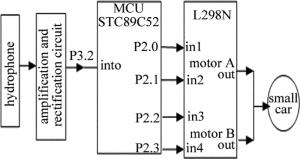
Figure 3. Block diagram of the receiving end
图 3中MCU内部定时器触发外部端口对TTL电平进行采样,当端口检测到信号时,由软件控制MCU对外部信号进行帧同步和位同步,得到其中传输的有效数据,完成对数字信号的解码处理。模拟水下目标的小车控制是采用L298N双H桥直流电机驱动芯片驱动双直流电机实现。
-
语音识别是在线完成的,对用户实时的语音信息进行自动识别,其过程可分为“前端”和“后端”两大模块:“前端”模块主要实现端点检测、降噪、特征提取等;“后端”模块是利用训练好的“声学模型”和“语言模型”对用户说话的特征向量进行统计模式识别,得到所包含的文字信息。语音识别的流程采用口令模式可以降低环境噪声对语音识别的干扰,在每次识别前先说出一级口令,使系统进入准备状态,然后说出要识别的指令;最后将语音识别结果通过PrintCom()函数调用国标扩展字符集由串口输出对应的字符化数据,字符化的流程图如图 4所示。
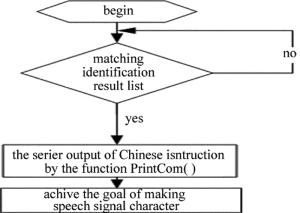
Figure 4. Flow chart of speech characterization
-
系统采用可变基频的ASK编码激光调制,即码元宽度受控制,不同帧的码元之间、帧与帧之间的间隙均受到控制,不同帧在有限的基频上跳变,控制激光脉冲以跳频模式发射。传输数据时,相邻的帧分别以多个不同基频循环跳变。
解码由接收端通过等间隔定时脉冲控制MCU对数据进行采样判决。如果收端MCU识别到下降沿即可进入中断程序进行采样,首先计算帧头(起始2位1电平间隔)的持续时间从而得到该帧的基频频率;然后通过定时判断下一个码元宽度内是否有下降沿,有则判为“1”,否则判为“0”,依此方法判断数据位及帧尾。译码数据存储在缓存器中,然后与预先设定的指令数据进行逻辑“与”,如果值为1,则根据该指令去控制小车做相应的动作;如果值为0,则判定数据译码失败。
-
系统实验在室内水深为1m的水池进行,激光器输出能量为200mJ(可调),激光脉冲宽度为10ns,水听器频率响应为0kHz~200kHz。
-
系统采用三基频帧结构进行了对应指令的硬件及软件测试,设置的基频频率为10Hz,15Hz,20Hz。系统开始上电和复位后MCU发送的第1帧数据基频频率为10Hz,第2帧~第4帧数据基频分别为15Hz,20Hz,10Hz,即MCU累计发送的数据频率按照10Hz,15Hz,20Hz的规则循环跳变,一组指令对应的字符化数据中相邻3帧数据的基频频率不同。如发送“前进”指令,将其进行字符化编码后分别插入10Hz,15Hz,20Hz基频中,“前进”指令对应串行输出的字符化数据为0xC7 0xB0 0xBD 0xF8 0x0D 0x0A,其中后两个字节为结束标志“\r\n”的对应代码。
发送端MCU通过串口接收到语音字符化数据后,先存储在缓存区,再将收到的数据进行单极性归零编码,按照定义的帧格式进行基频分帧后输出适合控制脉冲激光器的编码信号。首次发送“前进”指令可变基频输出的编码波形如图 5所示。
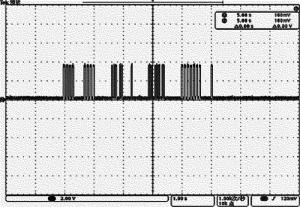
Figure 5. Waveform diagram of "forward" instruction code
图 5中从左到右的频率分别为10Hz,15Hz,20Hz,10Hz,波形显示相邻帧之间有较长的帧间隔(大于最长码元间隔),以便识别下一帧的数据。从第5帧和第9帧开始分别是第2次和第3次重复发送“前进”指令的字符化编码数据,与第1次发送“前进”的指令代码相同。
第3次发送“前进”指令的可变基频编码由水听器采集、滤波整形后的对应波形如图 6所示。图中1号序列为水听器采集到的模拟信号波形,2号序列为整形后的TTL电平信号。波形中3帧数据的基频分别为20Hz, 10Hz, 15Hz,指令代码0xC7 0xB0 0xBD与图 5中的前3帧相同。
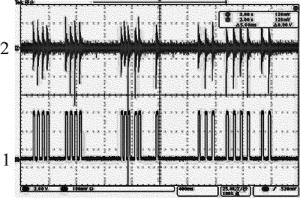
Figure 6. Waveform diagram of "forward" instruction code after shaping
为了验证数据指令长度对识别结果正确性的影响,实验中通过3个非特定人发音分别对包括一级口令“命令”在内的4组长度不同的指令进行测试,由于系统所用芯片支持不超过10个汉字的语音识别,测试采用的4组指令分别为:命令、前进、前进50m左转、1号开发板测试成功。说话者对每条指令重复20次,测试结果为当汉字长度为2个汉字时准确性达到90%以上;当为6个汉字时,准确性达到75%;当为8个汉字时,准确性达到40%,因此同一个人发音的情况下,指令越短,包含的汉字个数越少,识别准确性越高;当指令长度接近10个汉字时,识别的准确性显著降低。
-
系统译码测试通过上位机实时监测的方式实现,如图 7所示。
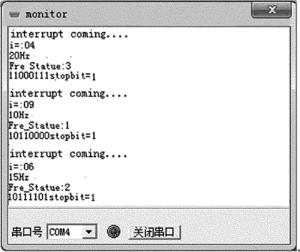
Figure 7. Decoding process and monitor of serial output of results
界面中“i=:04”、“i=:09”和“i=:06”分别表示每帧帧头码元间隔;“Fre_Statue:3”,“Fre_Statue:1”和“Fre_Statue:2”分别表示每帧的频率,译码结果与图 5中的发射数据相同。
系统的遥感目标采用驱动小车模拟,收端MCU对接收到译码结果“前进”、“左转”、“右转”和“停止”命令时,小车均能完成相应动作,有效验证了系统实现水下目标的遥感功能。
-
将语音信号进行字符化处理,其数据速率可以降低至100bit/s以下,能够很好地适应水声信道带宽较窄的信道特性,有效提高了空中平台对水下目标的遥感的响应速度。在实验室水池测试时,激光输出脉冲能量只使用60mJ左右,如果进行更远距离的水声信号传输,可通过提高发射端激光脉冲能量和设计一定的光学结构增加到达水中的能量密度,从而获得更高的光声转换效率。通过分析语音识别字符化编码技术原理与模拟测试发现,采用非特定人语音识别实现激光声水下遥感,具有实时性好、有效性高、水下目标控制快捷,为空中平台到水下通信与遥感应用提供了新的技术方案。
基于语音识别控制的激光超声水下遥感研究
Research on underwater remote sensing with laser ultrasound based on speech recognition control
-
摘要: 为了减少激光致声对水下目标遥感的实时性和有效性的影响,分析了激光超声诱导与光声效应原理,采用语音识别技术实现字符化编码,探讨语音信息的基频编码和控制激光发射的码型结构。搭建了实验测试系统,利用波长为1.06μm的脉冲激光进行水下超声激励,通过对水下激光声信号采集处理,完成了实验室空中平台到水下目标的实时语音控制。结果表明,非特定人的语音指令识别与编码方法有效实现了可变基频的激光超声水下目标控制。该研究为激光声水下目标遥感应用提供了一种新的技术途径。Abstract: In order to decrease the effect of laser-induced ultrasound on real-time performance and effectiveness of underwater remote sensing, the theory of laser-induced ultrasound and photoacoustic effect was analyzed. Character encoding was achieved by speech recognition technology. Baseband encoding for speech and code structure of controlling laser emission were discussed. The system of experimental measurement was set up. Pulse laser of 1.06μm wavelength was used to induce underwater ultrasound. By collecting and processing underwater laser-induced sound signals, real-time voice control from air platform in laboratory to underwater target could be accomplished. The experimental results show that, recognition and encoding for speaker-independent voice commands can realize the control of underwater target induced by laser ultrasound with adjustable baseband frequency. The study provides a new approach for underwater remote sensing with laser-induced ultrasound.
-
-

 点击查看大图
点击查看大图

图(7)
计量
- 文章访问数: 6512
- HTML全文浏览量: 4486
- PDF下载量: 17
- 被引次数: 0
