
Semi-smooth Newton method for total variation noise removal
-
摘要: 为了达到全变差噪声消除的图像去噪目的,将去噪问题转换为优化问题。采用了结合广义最小残差法的半光滑牛顿法来解决相关优化问题,求解非对称线性方程组,进行了理论分析和实验验证,取得了将该方法与其它方法应用于1维信号、2维图像去噪实验的大量可行数据。结果表明,结合广义最小残差法的半光滑牛顿法的收敛速度比结合预处理共轭梯度法的半光滑牛顿法和交替方向乘子法更快,而且能够有效地消除噪声。Abstract: In order to remove the noise of image based on total variation, the denoising problem was converted to optimization problem. Semi-smooth Newton method incorporated by generalized minimum residual method was used to solve the associated optimization problem and non-symmetric linear equations. After theoretical analysis and experimental verification, a great deal of feasible data of removal noise experiment for 1-D signal and 2-D image were obtained by different methods. The results show that semi-smooth Newton method incorporated by generalized minimum residual method converges faster than that incorporated by preconditioned conjugate gradients method and alternating direction method of multipliers algorithm. The proposed method can remove the noise of image effectively.
-
引言
数十年来,建筑业伴随着中国国民经济得到了飞速发展,大量的重大工程结构纷纷涌入公众视野[1]。时至今日,这些重大工程结构已经各自进入了其服役的中期或中后期,及时获取这些结构服役期间的状态信息以确保它们的安全运营显得尤为重要,因此,结构健康监测(structural health monitoring,SHM)逐渐开始受到社会各界的广泛重视[2-3]。在健康监测系统的实际应用中,传统的传感器如电阻应变片、钢弦计等,由于其耐久性和稳定性难以满足长期健康监测的需要,限制了健康监测领域的发展[4]。随着我国对智能材料研究工作的深入开展,光纤布喇格光栅(fiber Bragg grating,FBG)以其轻质柔软、精度高、抗电磁干扰、抗零飘等优越特性脱颖而出,已被长期结构健康监测作为局部监测的首选敏感元件,被认为是目前最有前景的传感器之一[5]。经过了国内外学者的大量研究,光纤光栅传感器在许多方面得到了发展,如光纤光栅的封装工艺、应变传递机理、应变传感特性等。由于结构健康监测需求日益增加,普通的单点式监测在某些方面如裂缝监测、损伤定位等已经达不到预期的理想监测效果。专家学者根据传感器的复用理论提出了FBG的准分布方式,将单点的参量测量拓扑为多点的网络监测。本文中在此理论基础上进行了钢筋混凝土梁的裂缝监测试验和工字型钢梁的损伤定位试验,将构件的关键部位进行单元划分并以准分布式FBG传感器进行覆盖,通过多点即时监测,利用各测点光栅的应变变化进行分析,从而裂缝监测和损伤定位[6-8]。
1. 准分布式FBG传感器
1.1 FBG传感器的工作原理
光纤布喇格光栅其工作原理是通过对光栅中心反射波长的测量从而得到目标参量,其中心波长λB与光栅周期Λ、纤芯有效折射率neff满足如下关系:
λB=2neffΛ (1) 可见,布喇格光栅中心波长取决于光栅周期和光纤有效折射率,任何使这两个参量变化的外界因素都会引起波长变化[9]。其中,应变和温度是能够显著改变布喇格光栅中心波长的两个物理量。波长漂移与应变和温度的关系如下:
ΔλB=(1−Pe)ΔελB+(α+ξ)ΔTλB (2) 式中,Δε是轴向应变变化量,ΔT是温差, Pe是光纤有效弹光系数, α和ξ分别是光纤的热膨胀系数和热光系数。
1.2 基于波分复用的准分布式FBG传感器
FBG传感器具有波长编码的特性,使得波分复用方案在FBG传感器的准分布方式中得到了研究及应用[10-11]。在该方案中,多个光纤光栅沿着同一根光纤分布,每个光栅都有各自的中心波长且互不重复,因此各光栅的反射光谱相互独立[12]。在一根或者多根光纤上布置若干个光纤光栅,通过光纤光栅解调仪进行数据采集继而传输至控制室完成数据的保存和分析,即可实现平面或空间中的准分布传感系统[13-15]。如图 1所示,在大范围内通过该方案可以实现多点实时监测。
本文中,光纤光栅解调仪采用美国MOI公司生产的SM130光纤光栅传感解调仪,分辨率小于1pm,精度小于10pm,扫描频率为1kHz;数据采集软件为Enlight v1.138。
图 2中,若将待测区划分成10个单元,将带有10个光栅的准分布式光纤布喇格光栅传感器中粘贴于该待测区,保证每个光栅均处于各自所在单元中心。由于整个光纤部分与待测区用胶水完全固定,故所测得应变实际为点应变。本文中,准分布式FBG传感器均采用纤维增强复合材料进行封装,外观如图 3所示。
2. 试验方案
2.1 裂缝监测试验
试验对象为一个钢筋混凝土简支梁,混凝土强度等级为C25,纵向受力钢筋等级为HRB335,表 1为该梁的截面参量。在跨中的780mm上设置分配梁,在分配梁跨中施加集中荷载,试验系统示意图见图 4。
Table 1. Interface parameters of concrete beambottom steel 21 
top steel 2 stirrup of encryption area width of beam height of beam thickness of protective layer 120mm 160mm 25mm 将集中荷载通过分配梁施加于试验构件,由此构件在分配梁支座之间的区段中产生纯弯段。将此区段划分为6个单元,依次记为C1~C6,并在表面粘贴准分布点式FBG传感器。传感器内包含6个光栅,记为F1~F6,各光栅的中心波长分别为1526.260nm,1550.582nm,1559.553nm,1571.532nm,1577.473nm和1580.380nm,光栅的位置由各个单元的中心确定。
2.2 损伤定位试验
试验对象为工字型简支钢梁,表 2为该梁的截面参量。工字梁跨度为1820mm,在跨中的780mm上设置分配梁,在分配梁跨中施加集中荷载,试验系统示意图见图 5。
Table 2. Interface parameters of H-shaped steel beamheight width thickness of web average thickness of flange 180mm 94mm 6.5mm 10.7mm 将在分配梁区段内的钢梁跨中部分划分为12个单元,记为C1′~ C12′,本试验中采用切除部分工字钢上下翼缘的方式构造损伤,设定3种工况:(1)无损伤(记为W1);(2)有一处损伤,在C4′处(记为W2);(3)有两处损伤,分别在C4′和C8′处(记为W3)。试验中准分布FBG传感器中共有6个光纤光栅,记为F1~F6,中心波长分别为1526.576nm,1550.962nm,1559.936nm,1571.899nm,1577.811nm和1580.709nm,传感器沿钢梁纵向粘贴在下翼缘中心,每个光栅落于两个单元中心。图 6为传感器布置示意图。
3. 试验结果与数据分析
3.1 裂缝监测试验数据分析
试验采用逐级加载,每级2.5kN。通过目测,荷载加载至第3级(即5kN~7.5kN)时,在C4中产生了裂缝。故取出0kN~7.5kN共3级加载下的各测点应变数据(见表 3)进行分析。
Table 3. Strain values of each gratingload/kN strain values of each grating/με F1 F2 F3 F4 F5 F6 0 0 0 0 0 0 0 2.5 51.75 53.3 54.17 44.86 45.05 44.95 5 116.7 125.83 123.79 96.02 98.34 92.82 7.5 221.84 274.95 259.71 279.8 181.36 144.27 在第1级荷载(0kN~2.5kN)加载中,由于在纯弯段内各测点应变均相等,试验数据中各测点应变增量在44.86με~54.17με之间,波动范围较小,混凝土基本处于弹性阶段,与实际情况相符。
在第2级荷载(2.5kN~5.0kN)加载中,F1~F3的应变增量在65με~72με之间,F4~F6的应变增量在48με~52με之间,明显两边的应变增量已经开始不再同步,混凝土已经不再处于弹性阶段,可以判断F3和F4所在单元范围内即将出现裂缝。
在第3级荷载(5.0kN ~7.5kN)加载中,F1~F6的应变增量为:105με,149με,136με,183με,83με和52με。此时F4处应变发生了突变,且其增量明显达到了各测点中的最大值,可以判断此时裂缝在C4处已经出现;试验和分析结果与实际情况(见图 7)相符。
3.2 损伤定位试验数据分析
试验采用逐级加载,4kN为1级,加至48kN,任意选取第11级(44kN)荷载作用下3种工况中各光栅测点应变数据如图 8所示。
![Figure 8. Date of strains in measuring points]() Figure 8. Date of strains in measuring pointsa—strains of measuring points under three cases b—between case 1 and case 2 c—between case 1 and case 3 d—between case 2 and case 3
Figure 8. Date of strains in measuring pointsa—strains of measuring points under three cases b—between case 1 and case 2 c—between case 1 and case 3 d—between case 2 and case 3图 8a中,3种工况下各测点应变不同,可知其中两种工况下的钢梁有损伤;图 8b中,F2处应变变化最大,F3处应变变化明显大于F1,可知F2覆盖的单元(C3′和C4′)内有损伤且该损伤靠近F3所覆盖的C5′,即C4′损伤;图 8c中,F4处应变变化最大,由于C4′的损伤对F3和F5带来了影响,故两处应变变化相差不大,只能初步确定损伤发生在F4所覆盖范围中;图 8d中,F4处应变变化最大,F5处应变变化明显大于F3,因而可以确定C8′有损伤。分析结果与实际情况相符。
4. 结论
通过准分布方式对传统单测点式FBG传感器进行了测量范围的拓展。以裂缝监测和损伤定位两个试验对其实际工程应用价值进行了论证。
(1) 在裂缝监测试验中,在其监测的关键部位划分单元并以准分布式FBG覆盖,随荷载的增加,可以通过各光栅的应变增量变化情况可以用来感知裂缝的出现进而对其进行定位。与实际情况相比较可知,此方案可以有效实现裂缝监测。
(2) 在损伤定位试验中,同样在可能发生损伤的部位划分单元以准分布式FBG覆盖,通过光栅当前应变与其未损伤时的应变差值可以用作损伤定位。试验结果证明,此方案可以有效地对损伤进行探测进而定位。
(3) 基于波分复用所开发的准分布式FBG传感器, 在一定范围内对待测区进行单元划分后通过对多个单元上的测点应变值数据分析,便可实现有效的、目标性监测。其监测的精度与单元的划分相关。此外,若对此准分布进行更为复杂的空间网络拓扑,即可获得更为详细的结构信息。
-
![]()
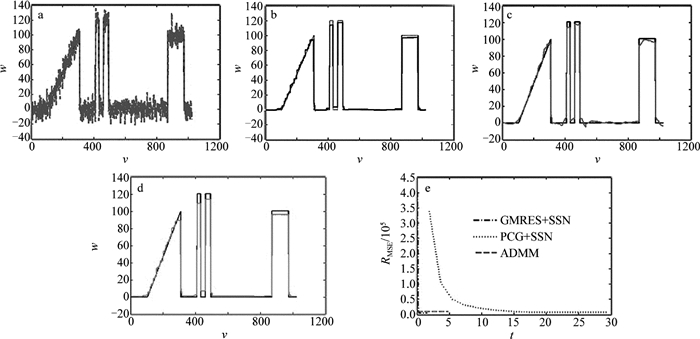
Figure 1. Experiment results of 1-D signal(δ=8, λ=50)
a—real data and noise data b—SSN incorporated by GMRES c—SSN incorporated by PCG d—alternating direction method of multipliers e—RMSE variation curve vs. iteration time t
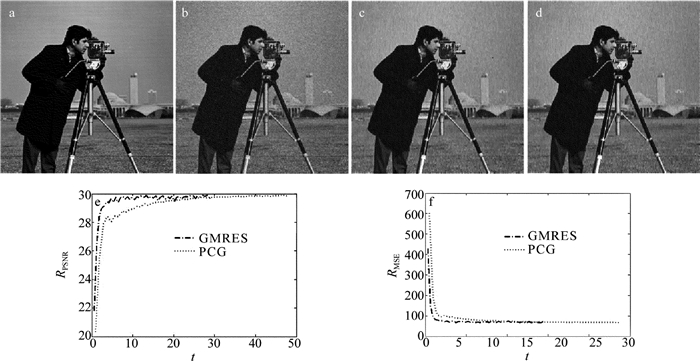
![]()
Figure 2. Experimental results of 2-D image(δ=12, λ=8)
a—original image b—noise image c—recover image of SSN incorporated by GMRES d—recover image of SSN incorporated by PCG e—RPSNR variation curve vs. iteration time t f—RMSE variation curve vs. iteration time t
Table 1 Experiment parameters when λ=50
β k1 t1 M1 k2 t2 M2 k3 t3 M3 2.2 29 2.1485 0.0662×105 15 19.9191 0.0992×105 1000 5.2583 0.1394×105 2.3 49 2.3740 0.0501×105 17 21.2814 0.0702×105 1000 5.4383 0.1225×105 2.4 86 3.1606 0.0484×105 20 25.9716 0.0581×105 1000 4.3907 0.1349×105 2.5 70 4.1595 0.0347×105 15 17.9194 0.0495×105 1000 4.1653 0.1121×105 2.6 44 1.5466 0.0450×105 15 16.9880 0.0579×105 1000 4.0729 0.1467×105 2.7 54 3.3145 0.0470×105 15 18.7179 0.0663×105 1000 4.0212 0.1565×105 2.8 45 3.0259 0.0437×105 17 19.6219 0.0774×105 1000 4.2353 0.1620×105 2.9 62 2.2909 0.0472×105 16 19.7418 0.0861×105 1000 4.1886 0.1748×105 3.0 45 3.0073 0.0509×105 24 28.2398 0.0743×105 1000 4.9195 0.1854×105 3.1 56 2.1859 0.0591×105 22 28.3739 0.0820×105 1000 5.0466 0.1949×105 3.2 80 2.7877 0.0421×105 18 22.8552 0.0565×105 1000 3.9656 0.1915×105 3.3 44 3.2971 0.0514×105 15 17.4596 0.0793×105 1000 4.0851 0.1971×105 3.4 84 5.0000 0.0511×105 15 19.5113 0.0866×105 1000 5.6617 0.2348×105 3.5 73 2.7443 0.0432×105 18 23.2715 0.0594×105 1000 4.4383 0.2249×105  下载: 导出CSV
下载: 导出CSV
-
[1] MICHAEL K, QI L Q, YANG Y F, et al. On semi-smooth Newton methods for total variation minimization[J]. Manufactured in the Netherlands, 2007, 27(3):265-276.
[2] PANG Zh F, LÜ J Ch. The modified semi-smooth Newton algorithm based on the ROF mode[J]. Pure Mathematics, 2011, 1(4):26-29(in Chinese).
[3] YANG M. Semi-smooth Newton method for solving nonlinear complementarity problems[D]. Xi'an: Xi'an Electronic and Science University, 2009: 9-20(in Chinese).
[4] CHEN X J, NASHED Z H, QI L Q. Smoothing methods and semismooth methods for nondifferentiable operator equations[J]. SIAM Journal Numerical Analysis, 2000, 38(4):1200-1216. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=e2fcbd904dac085d21ca62a01b8767ab
[5] CHEN M Y. Application of semi-smooth Newton method for solving elastic wave parameters inversion in porous media[D]. Dalian: Dalian Maritime University, 2013: 1-23(in Chinese).
[6] GRIESSE R, LOREN D A. A semismooth Newton method for Tikhonov functionals with sparsity constraints[J]. Inverse Problem, 2008, 24(3):1-22. SAAD Y, SCHULTZ M. GMRES:a generalized minimal residual algorithm for solving nonsymmetric linear systems.SIAM Journal of Scientific and Statistical Computing, 1986, 7(3):856-869. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ028170244/
[7] GUAN P Y, LI C G, JING H F. A weighted GMRES method based on polynomial preconditioning generalized minimal residual method[J]. Journal of Engineering Mathematics, 2014, 31(5):697-706(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gcsxxb201405007
[8] MEI D. GMRES algorithm based on solution space decomposition and its application in image processing[J]. Computer and Digital Engineering, 2009, 37(12):139-143(in Chinese).
[9] WANG Q, DAI H. Regularization GMERR method for solving discrete ill-posed problems[J]. Mathematica Numerica Sinica, 2013, 35(2):195-204(in Chinese).
[10] WANG M J, PAN Z Y. A regularization method for solving nonlinear ill-posed problems[J]. Journal of Xi'an Polytechnic University, 2013, 27(5):675-679(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hljdxzrkxxb200505017
[11] FUHRY M. A new tikhovon regularization method[J].Numerical Algorithms, 2012, 59(3):433-445. DOI: 10.1007/s11075-011-9498-x
[12] CHAMBOLLE A, POCK T. A first-order primal-dual algorithm for convex problems with applications to imaging[J]. Journal of Mathematical Imaging and Vision, 2011, 40(1):120-145. DOI: 10.1007/s10851-010-0251-1
[13] WANG S N, XU J, HUANG X L. Convex optimization[M]. Beijing:Tsinghua University Press, 2013:85-90(in Chinese).
[14] CAI X J, HAN D, XU L L. An improved first-order primal-dual algorithm with a new correction step[J]. Springer Science+Business Media, 2013, 57(4):1419-1428. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=2ba57d3abd04a0e59222dab69bc9c62e
[15] STEPHEN B, LIEVEN V. Convex optimization[M]. Cambridge, UK:World Book Publishing Company, 2004:90-92.
[16] ZHANG T B, XIE J, ZHU J J. The solution of the problem of the solution of the conjugate gradient method and its application in GPS[J]. Surveying and Mapping Engineering, 2010, 19(4):60-63(in Chinese).
[17] SUN Y J, SUN Q. Large complex linear equations with two conjugate gradient method[J]. Computer Engineering and Appliction, 2007, 43(36):19-20(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bfd6f6dd948d60a5da75b33ef1113f12
[18] LI W R. Semismooth newton algorithm for NCP with a non-monotone line search[D]. Tianjin: Tianjin University, 2008: 16-20(in Chinese).
[19] DANIELE G, LANURE BF, GILLES A. ADMM algorithm for demosaicking deblurring denoising[J/OL].(2013-10-18)[2016-01-13].https://hal.archives-ouvertes.fr/hal-00874610/file/admcolorpaper-5.pdf.
[20] JOAO F C M, JOAO M F X, PEDRO M Q A. ADMM for consensus on colored networks[J]. Decision and Control, 2012, 8267(1):5116-5121.
[21] YASAR K A, ORHAN A. ADMM based mainlobe power constrained phase-only sidelobe supperssion[C]//2014 IEEE 22nd Signal Processing and Communications Applications Conference (SIU). New York, USA: IEEE, 2014: 610-614.
[22] YASAR K A, ORHAN A. ADMM based mainlobe power constrained phase-only sidelobe supperssion[C]//2014 IEEE 22nd Signal Processing and Communications Applications Conference (SIU).New York, USA: IEEE, 2014: 610-614.
-
期刊类型引用(9)
1. 宋涵,赵光耀,张锋,王振,张昆桥. 柔性铰链多级增敏的光纤应变传感器设计应用. 数字制造科学. 2024(02): 89-94 .  百度学术
百度学术
2. 韩颖,张旭,于明鑫,庄炜. 基于改进LSTM的FBG传感网络光谱基线校正方法. 光通信研究. 2024(04): 42-49 . 百度学术
3. 张子娇,刘万泉,张旭,吕峥,庄炜. 基于KMeans的MG-Y激光器准连续调谐方法. 光通信研究. 2024(04): 83-88 . 百度学术
4. 秦根朝,孟凡勇,李红,庄炜,董明利. 光纤光栅链路反射谱强度自适应解调. 红外与激光工程. 2022(05): 245-252 . 百度学术
5. 刘浩,吴静红,杨鹏,魏广庆,唐柏鉴. 混凝土结构裂缝高空间分辨率应变测量技术探测模拟试验. 苏州科技大学学报(工程技术版). 2020(02): 23-30 . 百度学术
6. 李莹莹,刘智超. 基于FBG的复杂面形应变场检测系统研究. 激光技术. 2020(05): 652-656 . 本站查看
7. 江灏,周清旭,陈静,缪希仁. 畸变光谱下光纤布拉格光栅传感网络波长检测优化方法. 光学学报. 2019(10): 92-101 . 百度学术
8. 吴永红,朱莎,许蔚,张海明. 分布式光纤裂缝传感工程应用研究进展. 激光与光电子学进展. 2018(09): 15-28 . 百度学术
9. 宋言明,孟凡勇,娄小平,祝连庆. 采用FBG正交传感网络的静载识别研究. 电子测量与仪器学报. 2017(08): 1227-1232 . 百度学术
其他类型引用(9)








计量
- 文章访问数: 13
- HTML全文浏览量: 0
- PDF下载量: 4
- 被引次数: 18