 网站地图
网站地图





-
光电成像系统通常由光学系统、光电探测器、数据采集与显示计算机组成。其中,光学系统的主要作用是将目标和背景的光信息会聚到探测器上;光电探测器进而将目标和背景的光信息转化为电信号,并对电信号进行存储、转移、采样、放大、数模转换、合成所需要的图像信号,再由电子接口电路输入数据与显示计算机呈现出来。电荷耦合器件(charge-coupled device,CCD)是目前最常用的光电探测器之一,因其具有体积小、功耗低、灵敏度高、动态范围大等优点,而被广泛应用于工业、农业、科研、军事等领域[1-6]。
然而,任何事物都有其两面性,CCD具有极高的光探测灵敏度,也使得其极容易受到强激光的干扰和损伤[7-10]。近年来,人们对于激光辐照CCD的干扰效应研究,已有大量的文献资料报道[11-14]。然而,在实际开展激光对光电成像系统的干扰实验中,激光器与光电成像系统的作用距离较远,通常在5km以上,因此,激光束的传输方向与光电成像系统的光轴指向经常不在同一条直线上,也很难保证在一条直线上,即二者总是存在一定的夹角。通常定义激光束的传输方向与光电成像系统光轴的夹角为激光入射角。由于实验条件和测量精度的限制,目前很少有对比不同入射角下激光对光电成像系统的干扰效果及相互差异的研究报道。本文中将光电成像系统放置于2维精密转台上,通过调节2维转台的方位,进而调节系统光轴的指向,精确控制激光束入射光电成像系统的角度,实验研究不同入射角下的激光干扰效果。
-
图 1是不同入射角下激光干扰光电成像系统的实验布局图。实验中采用了波长为532nm的脉冲激光器,它是由北京镭宝激光技术有限公司生产的Nd:YAG激光器,采用电光调Q方式输出波长1064nm激光,再通过非线性变换倍频输出532nm激光,图中虚线即为激光束的传输方向。详细的发射参量为:光束发散角为3mrad;单脉冲能量50mJ;重复频率可以设置为10Hz, 50Hz和100Hz,对应输出功率为0.5W, 2.5W和5W。衰减器是适用于532nm波长激光的衰减片组。

Figure 1. Experimental layout
光电成像系统由光学系统(型号:AZURE-3514MM)和探测器(CCD)组成,放置在2维精密转台上。其中,光学系统由福州浩蓝光电有限公司生产,工作焦距是35mm,光圈F数可分别设置为1.4, 2.0, 2.8, 4, 8, 16和32;当配套的探测器光敏面对角线长度为1/3″时,系统全视场约为7.85°。光电探测器CCD是由北京联合赛仪科技有限公司代理生产的,型号为DMK23G 445,它采用Sony ICX445ALA芯片,具体参量包括:光敏面对角线长度1/3″、像元规模1280(长)×960(宽)、像元尺寸3.75μm×3.75μm。该CCD输出黑白图像,为获取探测器各像元产生目标/背景的电信号精确灰度值,作者直接采集信号处理电路输出的电信号,量化位数为12位,即输出图像的像元灰度级范围为1~4096。
-
实验中将光电成像系统固定放置在2维精密转台上,光学系统主轴的初始指向对准激光器的出光口,如图 1中带箭头的实线编号①所示,作为转台调节的基准方向。然后,调节转台的方位,精确控制激光束入射光电成像系统的角度,主轴指向如图 1中编号②、③、④、⑤、⑥、⑦所示,分别对应激光入射角α为1°, 2°, 3°, 4°, 4.1°, 4.2°,实验研究不同入射角下的激光干扰效果。
-
实验中保持激光器的具体发射参量如下不变:单脉冲能量50mJ,重复频率10Hz。为避免强激光损伤探测器,衰减片组的衰减倍率设置为130dB。光学系统的光圈F数设置为16,对应光学系统的光瞳口径约为2.2mm。探测器的相关参量设置为:积分时间40ms,自身增益为0,即探测器的自身增益处于关闭状态,没有对电信号进行放大处理。从入射角0°(即激光束正入射,对应图 1中编号①)开始实验,逐渐增大激光束的入射角,实验过程如下,详细结果如图 2所示。
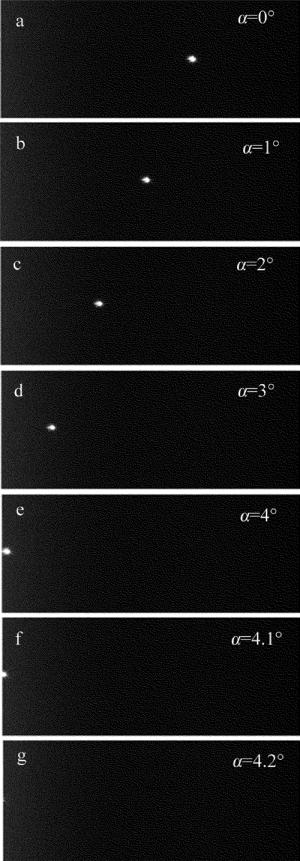
Figure 2. Positions of laser spot on the detector under different incident angles
(1) 图 2a中激光束0°入射时,对应光轴指向如编号①所示,激光光斑中心位于像素(491, 666)附近,基本处于探测器的中心,光斑周围分布着光学系统光瞳衍射效应产生的衍射线[15];(2)图 2b中激光束1°入射时,对应光轴指向如编号②所示,激光光斑中心移动到了像素(484, 509)附近;(3)图 2c中激光束2°入射时,对应光轴指向如编号③所示,激光光斑中心移动到了像素(483, 344)附近;(4)图 2d中激光束3°入射时,对应光轴指向如编号④所示,激光光斑中心移动到了像素(483, 177)附近;(5)图 2e中激光束4°入射时,对应光轴指向如编号⑤所示,激光光斑中心移动到了像素(483, 19)附近;(6)由于此时激光光斑已经接近了视场边缘,开始微调转台方位,图 2f中激光束4.1°入射时,对应光轴指向如编号⑥所示,激光光斑中心移动到了像素(483, 4)附近;(7)图 2g中激光束4.2°入射时,对应光轴指向如编号⑦所示,激光光斑中心已经移出了光学系统的视场,输出图像只有隐约可见的两条衍射线。
为研究探测器上的激光光斑位置随入射角增大的移动趋势,将不同入射角对应的激光光斑中心位置在图 3中用小三角形标出,并对图中小三角形的移动趋势利用MATLAB拟合工具箱进行数据拟合。拟合结果表明,激光光斑中心随入射角增大的移动趋势满足下列线性关系:
$ ~y=ax+b~ $
(1) 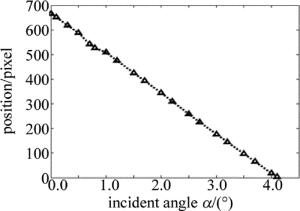
Figure 3. The variable trend of laser spot with the increase of incident angle
式中,y代表激光光斑中心在探测器上的位置,x代表激光束的入射角。拟合结果为:a=-162.5,b=668。MATLAB给出的拟合评估参量为:确定系数R2=0.9999,校正的确定系数R2也为0.9999,二者均非常接近于1;均方根或者称标准差(root mean square error, RMSE)为2.2。拟合评估参量表明:选用线性方式拟合与实验数据吻合非常好,即激光光斑的位置随入射角的增大而线性移动。系数a的绝对值对应拟合直线的斜率为162.5,该数值表明激光光斑的移动速率为:激光入射角平均每增加0.1°,激光光斑中心向偏离探测器中心的方向移动16.25个像素。
-
固定激光器的发射参量不变,研究随着激光束入射角的增大对探测器接收激光能量的影响。由于光学系统AZURE-3514MM的半视场角只有4°左右,加上激光器自身能量的起伏,所以采用功率探头很难精确测量出入射角变化对探测器接收能量的影响。本文中通过统计不同入射角下各灰度级的像元数变化,研究入射角变化对探测器接收激光能量的影响。
详细的统计结果已经在表 1中给出,并在图 4中显示了统计的各灰度级像元数随入射角增大的变化趋势。需要指出的是,型号为DMK23G 445的黑白CCD,输出图像的像元灰度级范围为1~4096。因此,表 1中的饱和像元数即是灰度级为4096的像元的数目;为了全面分析问题,还统计了灰度级大于饱和灰度级80%的像元数、大于饱和灰度级50%的像元数以及大于饱和灰度级30%的像元数。由表 1和图 4可以确定,各灰度级的像元数随着入射角的增大,整体趋势在不断减少,尤其在激光光斑移出光学系统视场以后迅速降为0,这就表明探测器接收的激光能量在减小;但是由于激光器自身能量的起伏,各灰度级像元数的变化趋势有细微的波动。分析可知,各灰度级像元数随入射角增大而减少的原因是,探测器接收的激光能量实际上等于入射的激光能量乘以一个cosα因子,入射角α越大,探测器接收能量越小。然而,光学系统的半视场角只有4°左右,所以视场边缘处探测器接收的激光能量也仅仅是降到入射激光能量的0.9976,不超过1%。但是,对于大视场角的光学系统,比如超广角光学系统视场角90°以上,cosα因子就不能忽略了,入射角增大引起的探测器接收能量较小就需要重点考虑。
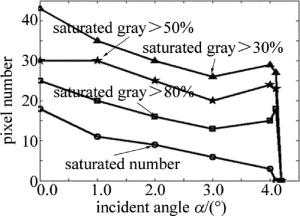
Figure 4. The variable trend of pixel numbers with the increase of incident angle
Table 1. Pixel numbers under different incident angles
incident angle/(°) saturated pixel saturated gray>80% saturated gray>50% saturated gray>30% 0 18 25 30 43 1 11 20 30 35 2 9 16 25 30 3 6 13 20 26 4 3 15 24 29 4.1 0 18 23 27 4.2 0 0 0 0 -
前面研究了入射角增大对激光光斑位置、接收能量的影响,本节中研究其对激光光斑形状的影响。为了清晰地显示不同入射角下的激光光斑形状,以激光光斑中心作为显示图像的中心,只显示其周围像元规模201×201的区域,如图 5a~图 5d所示。由于图 5e和图 5f对应激光束较大的入射角,激光光斑已接近探测器边缘,所以这两幅图中的激光光斑并不在图像中心。

Figure 5. Laser spots on the detector under different incident angles
由图 5可知,除了图 5f中入射角4.1°时, 激光光斑的一部分移出探测器以外,其它不同入射角下的激光光斑形状差异肉眼很难比较。为了定量比较,引入统计学中的相关系数进行研究,其定义为:
$ r = \frac{{\sum\limits_{i = 1}^n {} ({\mathit{\boldsymbol{x}}_i} - \bar x)({\mathit{\boldsymbol{y}}_i} - \bar y)}}{{\sqrt {\sum\limits_{i = 1}^n {} {{({\mathit{\boldsymbol{x}}_i} - \bar x)}^2}\sum\limits_{i = 1}^n {} {{({\mathit{\boldsymbol{y}}_i} - \bar y)}^2}} }} $
(2) 式中,xi和yi是两个向量,这里分别对应图 5中不同入射角下的两个2维灰度图像矩阵。激光光斑形状在不同入射角下的相关系数在表 2中详细给出。可见,除了入射角2°和3°下光斑形状之间的相关系数小于0.9以外,其余均大于0.9。统计学分析认为,r>0.95, 存在显著相关;r>0.8, 高度相关;0.8>r>0.5, 中度相关;0.5>r>0.3, 低度相关; r=0, 完全不相关。因此,在激光光斑落在探测器上的前提下,不同入射角下的激光光斑形状高度相关,差异非常小,换句话说,不同入射角下的激光光斑形状没有什么变化,即满足空间平移不变性。
Table 2. Correlation coefficient of laser spot under different incident angles
r α=0° α=1° α=2° α=3° α=4° α=0° 1 0.9331 0.9072 0.9265 0.9637 α=1° 0.9331 1 0.9515 0.9124 0.9561 α=2° 0.9072 0.9515 1 0.8669 0.9296 α=3° 0.9265 0.9124 0.8669 1 0.9717 α=4° 0.9637 0.9561 0.9296 0.9717 1 -
由于在实际激光干扰中,作用距离较远,激光束常常以某一入射角对光电成像系统实施干扰。本文中采用固定激光传输方向不变、调节光轴的方法,实验研究了不同入射角下激光对光电成像系统的干扰效果。
(1) 探测器上的激光光斑位置随入射角的增大线性移动,对于本文中的光电成像系统(光学系统AZURE-3514MM和探测器DMK23G 445)而言,移动速率为入射角每增加0.1°,光斑偏离探测器中心16个像素。
(2) 探测器上接收的激光能量随入射角的增大而减小,对于本文中的小视场光学系统(半视场角为4°)而言,能量减小的幅度不超过1%。
(3) 光斑形状随入射角的增大满足空间平移不变性,即不同入射角下的光斑形状差异非常小。
该研究结果可为开展激光对抗光电成像系统试验提供理论依据和技术支撑。
不同入射角下的激光干扰效果研究
Laser disturbing effect under different incident angles
-
摘要: 为了研究不同入射角下的激光干扰效果,采用逐步调节光轴指向的方法,对不同入射角下的干扰效果进行了实验研究和理论分析,取得了不同入射角下激光束在探测器上光斑位置、接收能量和光斑形状的数据。结果表明,光斑位置随入射角的增大而线性移动,对于本文中的光电成像系统而言,移动速率为入射角每增加0.1°,光斑偏离探测器中心16个像素;接收能量随入射角的增大而减小,对于本文中视场角为8°的光学系统而言,减小的幅度不超过1%;不同入射角下的激光光斑形状满足空间平移不变性。这一结果对开展激光干扰光电成像系统试验是有帮助的。Abstract: In order to investigate laser disturbing effects under different incident angles, experimental study and theoretical analysis were carried out by gradually adjusting the optical axis pointing. Spot positions, receiving energies and spot shapes of laser on the detector were achieved under different incident angles. The results show that spot positions shift linearly with the increase of incident angle. The spot would deviate 16pixel from the center of detector with the increase of 0.1° of incident angle. Receiving energy decreases with the increase of incident angle and the reduction is less than 1% for the optical system with viewing angle of 8°. Spot shape meets space shift invariance under different incident angles. The study is helpful for the experiment of laser jamming electro-optical imaging system.
-
Table 1. Pixel numbers under different incident angles
incident angle/(°) saturated pixel saturated gray>80% saturated gray>50% saturated gray>30% 0 18 25 30 43 1 11 20 30 35 2 9 16 25 30 3 6 13 20 26 4 3 15 24 29 4.1 0 18 23 27 4.2 0 0 0 0  下载: 导出CSV
下载: 导出CSV
Table 2. Correlation coefficient of laser spot under different incident angles
r α=0° α=1° α=2° α=3° α=4° α=0° 1 0.9331 0.9072 0.9265 0.9637 α=1° 0.9331 1 0.9515 0.9124 0.9561 α=2° 0.9072 0.9515 1 0.8669 0.9296 α=3° 0.9265 0.9124 0.8669 1 0.9717 α=4° 0.9637 0.9561 0.9296 0.9717 1
下载: 导出CSV
-
[1] LIANG W W, HUANG Zh Y, ZHANG W P, et al. Study on error signal of quadrant detectors in laser seekers[J]. Laser Technology, 2014, 38(4):569-573(in Chinese). [2] LIU Ch A, CHEN J B, MA J L. Jamming of visible light array CCD imaging system by infrared laser[J]. High Power Laser and Particle Beams, 2010, 22(8):1727-1730(in Chinese). doi: 10.3788/HPLPB [3] XU Y, SUN X Q, SHAO L I. Impact of laser jamming on target detection performance in CCD imaging system[J]. Infrared and Laser Engineering, 2012, 41(4):989-993(in Chinese). [4] HAN K, XU X J. Study on saturation area of detector based on envelop of Airy function[J]. Chinese Journal of Lasers, 2010, 37(s1):94-97(in Chinese). [5] WANG W F, LIU Z G, WANG S C. Design of energy simulation system for laser guided weapons[J]. Laser Technology, 2012, 36(6):844-848(in Chinese). [6] LI S W, ZHANG J L, HAO J. Elimination of the interference of bias light for laser waring systems[J]. Laser Technology, 2012, 36(5):642-644(in Chinese). [7] LIU Y W. Experiment research on laser disturbing CCD detectors[J]. Laser Journal, 2011, 32(1):55-56(in Chinese). [8] WANG Y B, WANG G L, CHEN Q R, et al. Influence of detector's gain on laser disturbing effect[J]. Chinese Journal of Lasers, 2015, 42(s1):102016(in Chinese). doi: 10.3788/CJL [9] XU Y, SUN X Q, SHAO L. Simulation of laser jamming and its influence on CCD imaging performance[J]. Proceedings of the SPIE, 2010, 7850:78501W1. doi: 10.1117/12.870252 [10] LI H Y, ZHU M, LU H Y. Off-axis laser disturbing CCD imaging guidance weapons[J]. Infrared and Laser Engineering, 2009, 38(1):66-69(in Chinese). [11] GUO Sh F, CHENG X G, FU X Q. Failure of array CCD irradiated by high-repetitive femto-second laser[J]. High Power Laser and Particle Beams, 2007, 19(11):1783-1786(in Chinese). [12] ZHANG Zh, CHENG X G, JIANG Z F. Excessive saturation effect of visible light CCD[J]. High Power Laser and Particle Beams, 2008, 20(6):917-920(in Chinese). [13] WANG Y B, WANG G L, CEHN Q R.Study of laser disturbing effect under different F number of optical system[J]. Acta Optica Sinica, 2015, 35(s2):211001(in Chinese). doi: 10.3788/AOS [14] WANG S W, GUO L H. Experiment study on the laser dazzling of CCD photoelectric dector[J]. Laser Journal, 2009, 30(1):28-29(in Chinese). [15] WANG Y B, QI F J, LI H, et al. Diffraction effect of entrance pupil by irradiating visible light array CCD with pulsed laser[J]. High Power Laser and Particle Beams, 2014, 26(1):011009(in Chinese). -

 点击查看大图
点击查看大图

图(5) / 表(2)
计量
- 文章访问数: 6302
- HTML全文浏览量: 4144
- PDF下载量: 447
- 被引次数: 0
