 网站地图
网站地图












-
大功率射频板条CO2激光器具有高光束质量、高稳定性和高效率的特点,3kW及以上是激光切割、焊接的主力光源。激光器的输出光束模式和激光功率稳定性的好坏,直接影响实际激光加工质量。在激光加工过程中,实时监控激光输出功率,保证输出功率的稳定和精度具有重要意义[1]。
常规的激光功率检测与控制系统在射频板条CO2激光器的工作过程中会受到射频信号的强烈干扰,从而严重影响激光功率检测的准确性,这就要求激光功率检测系统具有较高的响应速度和灵敏度[2]。目前,国内LIU, PENG等人设计的激光功率检测系统[3-4],仍存在着检测精度不高、响应速度不够快的问题。本文中针对3kW射频板条CO2激光器功率检测与控制问题,进行新的硬件电路设计,旨在增强检测系统抗干扰性以及提高响应速度。
高功率射频板条CO2激光器运行时,腔镜发热畸变造成光路偏移,导致激光器输出功率波动损失,本文中采用转折镜调节方法,选择PA 100/T 14压电陶瓷为微位移驱动器,实现转折镜的转动,补偿光束整形系统的光路失调[5-6]。功率检测与控制系统结合外光路偏移补偿系统,提高了3kW射频板条CO2激光器稳定性和光束质量。
-
3kW射频板条CO2激光器实物如图 1所示。其结构包括自激式射频电源、谐振腔、光束整形、功率控制以及制冷系统[7],如图 2所示。激光器正常运行时,可编程逻辑控制器(programmable logic controller, PLC)发出系统控制信号,脉宽调制器输出相应的脉冲宽度调制(pulse width modulation,PWM)信号,此信号经过栅极驱动电路后被放大,然后进入到电子管栅极叠加在射频信号上,通过控制放电极板上电压的存在时间,间接地控制激光器的输出光功率大小[8-9]。外光路激光功率经取样功率信号放大、电压电流转换,实现对激光器输出功率的检测与反馈[10]。当腔镜热畸变造成光束整形系统光路失调,激光功率反馈信号放大后驱动压电陶瓷发生微动,转折镜调节系统进行定量的转动实现外光路补偿,保证最佳激光输出。
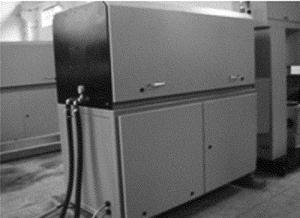
Figure 1. 3kW radio frequency slab CO2 laser
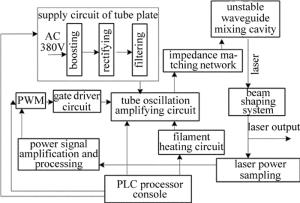
Figure 2. Schematic of 3kW radio frequency slab CO2 laser
-
激光功率检测系统包括取样镜、热电探测器、信号放大电路板和信号处理电路板,如图 3所示。图 3a为实物图,图 3b为结构框图。其中,外光路有一面反射镜采用透射率为0.5%对输出激光功率进行取样,热电探测器接收取样镜传来的微弱电信号经过放大电路后变成几伏的电压信号,再经过屏蔽双绞线传送到信号处理电路板,最终转换成工业环境中可用的4mA~20mA的电流信号。图 3b中的信号放大电路板与热电探测器封装在一起,以避免外界以及长距离传输造成的干扰。
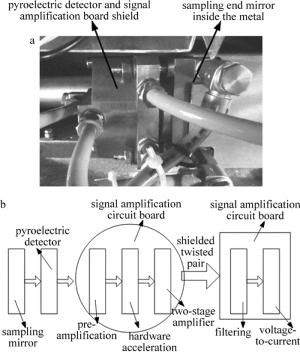
Figure 3. Laser power detection system
-
3kW射频板条CO2激光器激光功率检测采样激光的最大功率为25W,本文中采用热电探测器为Gentec-EO公司的型号UD19-150-H5探测器,具体参量如表 1所示。
Table 1. Parameters of thermoelectric detector
parameter name value wavelength 0.19μm~20μm input power peak 150W noise equivalent power 1mW response time 2.8s sensitivity 0.64mV/W 设计前置放大器时,根据要求,功率检测系统的噪声等效功率不超过25mW,为降低检测系统的输出噪音,采用直接耦合方式,如图 4所示。其中图 4a为前置放大器电路。热电探测器的输出信号通过J2与前置放大器直接耦合,减小输出端的噪声[11]。
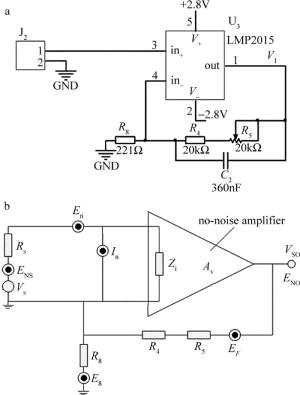
Figure 4. Principle diagram of amplifier circuit
前置放大电路的噪声模型如图 4b所示。其中,Vs, Rs, ENS分别为热电探测器输出电压、内阻、噪声,EF和E8分别为对应电阻热噪声,En和In为放大器的等效输入噪声电压和噪声电流。令RF=R4+R5,则放大器的反馈系数为$F = \frac{{{R_8}//\left( {{R_{\rm{s}}} + {Z_{\rm{i}}}} \right)}}{{{R_F} + {R_8}//\left( {{R_{\rm{s}}} + {Z_{\rm{i}}}} \right)}}$,由于放大器输入阻抗Zi很大,可以近似为:$F \approx \frac{{{R_8}}}{{{R_8} + {R_F}}}$。闭环放大倍数为:${A_{{\rm{VS}}}} = \frac{{{V_{{\rm{SO}}}}}}{{{V_{\rm{s}}}}} = \frac{{{A_{\rm{V}}}}}{{1 + F{A_{\rm{V}}}}} \approx \frac{1}{F} = \frac{{{R_8} + {R_F}}}{{{R_8}}}$,VSO是输出端电压,叠加各个噪声源在输出端的噪声功率大小,得到总的输出噪声功率为:
$ \begin{array}{*{20}{c}} {{E_{{\rm{NO}}}} = {A_{{\rm{VS}}}}^2{E_{{\rm{NS}}}}^2 + {A_{{\rm{VS}}}}^2{E_{\rm{n}}}^2 + {A_{{\rm{VS}}}}^2{I_{\rm{n}}}^2\left[ {{R_{\rm{s}}} + } \right.}\\ {{{\left. {\frac{{{R_8}{R_F}}}{{{R_8} + {R_F}}}} \right]}^2} + {E_{\rm{F}}}^2 + {A_{{\rm{VS}}}}^2{E_8}^2\frac{{{R_F}^2}}{{{{({R_F} + {R_8})}^2}}}} \end{array} $
(1) 则等效输入噪声为:
$ \begin{array}{*{20}{c}} {{E_{{\rm{NI}}}}^2 = \frac{{{E_{{\rm{NO}}}}^2}}{{{A_{{\rm{VS}}}}^2}} + {E_{{\rm{NS}}}}^2{E_{\rm{n}}}^2 + {I_{\rm{n}}}^2{{\left[ {{R_{\rm{s}}} + \frac{{{R_8}{R_F}}}{{{R_8} + {R_F}}}} \right]}^2} + }\\ {{E_F}^2\frac{{{R_{\rm{8}}}^2}}{{{{({R_F} + {R_8})}^2}}} + {E_8}^2\frac{{{R_F}^2}}{{{{({R_F} + {R_8})}^2}}}} \end{array} $
(2) 由于C2抑制高频噪声被放大,前置放大器的带宽为11Hz左右,因此,其等效输入噪声电压主要为闪烁噪声。计算可知前置放大电路的等效输入噪声电压小于3μV,满足探测系统的要求。
LMP2015的输入失调电流温漂和输入偏置电流变化都很小,对输入失调电压变化ΔVOS影响可忽略,只考虑其它参量对ΔVOS的影响。实际放大器共模抑制比的传输特性Vo=α(Vp-Vn)+αCMRRVCMRR,其中α为差模电压增益,αCMRR为共模电压增益,Vp为放大器正输入端电压,Vn为放大器负输入端电压,VCMRR为共模输入电压,且VCMRR=(Vp+Vn)/2。由于放大器的共模抑制比A可表示为$A = \frac{\alpha }{{{\alpha _{{\rm{CMRR}}}}}}$,则可得Vo=α(Vp+VCMRR·αCMRR/α-Vn)。
放大器供电电源抑制比B近似为B=ΔVOS/ΔVs。实际放大器的开环增益α是有限的,因此放大器正负输入端的电压之差Vp-Vn会随着输出摆动ΔVo以ΔVo/α的规律变化,该结果可以看作一个值为ΔVOS=ΔVo/α的有效输入失调电压。
综上所述,输入失调电压变化为:ΔVOS=C×ΔT+$\frac{{{V_{{\rm{CMRR}}}}}}{A} + \frac{{\Delta {V_{\rm{s}}}}}{B} + \frac{{\Delta {V_{\rm{o}}}}}{\alpha }$,其中C表示放大器输入失调电压温漂。根据放大器使用环境温度为-10℃~50℃,输入电压范围为0mV~16mV,电源电压最大变化为10mV,输出电压变化范围为0V~2.7V, 可得输入失调电压变化值为1.75μV,满足系统的要求。
热电探测器直接输出电压的响应时间为2.8s,不能满足激光输出响应速度。因此,必须设计预测电路,使信号更快达到变化的最终值,提高功率探测系统的响应速度。热电探测器的输出信号变化特性为:V1=VF-(VF-Vin)e-t/τ。其中,V1是探测器输出信号,Vin为探测器输出变化信号初始值,VF为变化最终值,τ为探测器的响应时间常数,为一固定值。若用与探测器响应时间常数相同的时间常数对探测器输出信号作微分,就可以很快得到探测器输出信号变化的最终值。本文中设计的激光功率预测电路,如图 5所示。电路可以分为两部分,一部分是低通滤波电路,由U2B, R1, R6, R11, R14, C5组成;一部分为反向比例调整电路,由U2A, R22, R12组成。
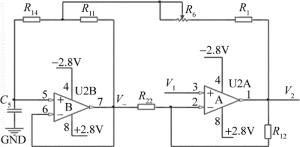
Figure 5. Principle diagram of predictor circuit
低通滤波电路作用于输出信号V2时的输出V-为:${V_ - } = \frac{{{V_2}}}{{1 + \tau s}}$,其中$\tau = \left( {{R_1} + \frac{{{R_1} + {R_6}}}{{{R_{11}}}}{R_{14}} + {R_{14}}} \right)C$,s=j·2πf,f为激光功率的变化频率。反向比例调整电路作用于低通滤波电路的输出信号V-和探测器输出信号V1。输出信号V2与V-、输入信号V1的关系式为:${V_2} = \frac{{{R_{12}} + {R_{22}}}}{{{R_{22}}}}{V_1} - \frac{{{R_{12}}}}{{{R_{22}}}}{V_ - }$,综合上述计算可得输出信号:
$ \begin{array}{*{20}{c}} {{V^2} = \frac{{{V_1}\left( {1 + \tau s} \right)}}{{1 + \frac{{{R_{22}}}}{{{R_{12}} + {R_{22}}}}\tau s}} = }\\ {{V_1}\left( {1 + \tau s} \right)\frac{1}{{1 + \frac{{{R_{22}}}}{{{R_{12}} + {R_{22}}}}\tau s}}} \end{array} $
(3) 式中,V1(1+τs)=V1+$\tau \frac{{{\rm{d}}{V_1}}}{{{\rm{d}}t}}$=VF,忽略电路响应时间的影响,将初始时刻t0热电探测器的输出信号V1接入电路,电路可以预测热电探测器在t=t0+0.8s时的输出电压V2。
-
基于TMS320LF2407设计的脉宽调制电路,如图 6所示,包括电源电路、模拟和数字电路、输出电路以及通讯电路等。其中,模拟输入量经过处理后进入数字信号处理(digital signal process, DSP)中,通过控制PWM信号的占空比和频率,完成对激光输出功率的调节;数字电路将开关信息等数字量处理后传送给DSP,实现对PWM开关控制[12-14]。
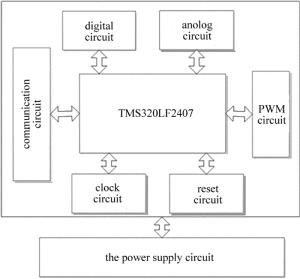
Figure 6. Schematic of TMS320LF2407 pulse modulation circuit
激光器有多种工作模式,如连续、脉冲、斜坡、功率反馈等。其中功率反馈工作模式根据功率检测系统测得的激光功率调整PWM信号占空比,使激光器功率保持稳定。在3kW射频板条CO2激光器上对功率检测系统进行多次测试,并和标准功率计比较,如表 2所示。可知两者输出功率的最大偏差值为9W,检测系统的最大误差值为2.59%,检测系统具有很高的线性度,保证了功率检测的精确度。
Table 2. Relationship between reference power meter and power detection system
reference
power value/Wpower value
of detection
system/Wdeviation
value/Wpercentage
of deviation value/%0 0 0 0 270 263 7 2.59 420 412 8 1.90 615 610 5 0.81 765 760 5 0.65 930 926 4 0.43 1110 1101 9 0.81 1275 1270 5 0.39 1440 1437 3 0.21 1620 1614 6 0.37 1755 1758 -3 -0.17 1890 1893 -3 -0.15 2025 2030 -5 -0.25 2130 2135 -5 -0.23 2220 2224 -4 -0.18 2250 2252 -2 -0.09 -
大功率射频板条CO2激光器运行时,腔镜发生热畸变引起输出光束偏移,偏离整形系统的滤波器中心,导致激光功率损失严重。利用滤波器前面转折镜调节光束偏移量,压电陶瓷高精度定位器作为转折镜调节的微位移驱动,如图 7所示,可保证3kW射频板条CO2激光器在高功率时、整形后激光功率稳定性和光束模式质量[15]。

Figure 7. Precision adjustment device of turning mirror
光束整形系统偏转调节原理如图 8所示,其中图 8a为光束整形系统侧视图,图 8b为外光路偏移后的俯视图。可以看出经球面镜聚焦后的光束在空间滤波器处不再重合。部分光束的主瓣被空间滤波器挡住,不能通过,导致激光功率下降,光束质量变差。
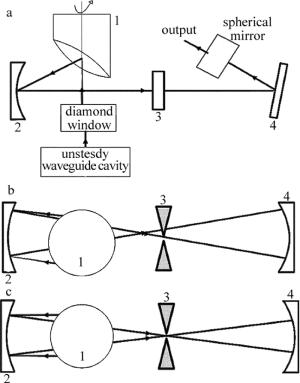
Figure 8. Deviation adjustment of out light path and light path(1—turning mirror; 2—spherical mirror; 3—spatial filter; 4—cylindrical mirror)
为了使聚焦光束能重新在空间滤波器处重合,调节转折镜的偏转角度,将偏移的光束重新调回到标准位置,图 8c为调节后的光路。可知,光束主瓣将重新全部通过空间滤波器,同时旁瓣将被滤除,激光器输出模式和功率重回到光路偏移前的水平。
-
上述光束整形系统的光路示意图如图 9所示,根据几何光学的知识,可以计算得到转折镜旋转角度θ0与空间滤波器处光束聚焦线偏移距离D的关系:
$ \begin{array}{*{20}{c}} {D = {l_3}\tan \left( {{m_0}{\theta _0}} \right) + }\\ {\frac{{\left[ {R - \frac{{{l_3}}}{{\cos \left( {{m_0}{\theta _0}} \right)}}} \right]\sin \left[ {\left( {1 - {m_0}} \right){\theta _0}} \right]}}{{\cos \left[ {\left( {2{m_0} - 1} \right){\theta _0}} \right]}}} \end{array} $
(4) 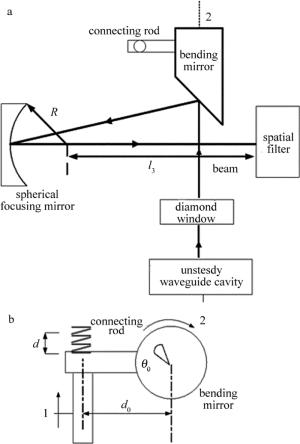
Figure 9. Beam shaping system adjustment of optical path deviation
式中, l3为空间滤波器到球面镜球心的距离,r为球面镜的曲率半径。
压电陶瓷微位移驱动器的伸长距离d和θ0之间近似满足关系:θ0=d/d0。d0是压电陶瓷安装孔中心轴线到转折镜转动轴线的距离。则可以得到D与d的关系式为:
$ \begin{array}{*{20}{c}} {D = {l_3}\tan \left( {{m_0}\frac{d}{{{d_0}}}} \right) + }\\ {\frac{{\left[ {r - \frac{{{l_3}}}{{\cos \left( {{m_0}d/{d_0}} \right)}}} \right]\sin \left[ {\left( {1 - {m_0}} \right)d/{d_0}} \right]}}{{\cos \left[ {\left( {2{m_0} - 1} \right)d/{d_0}} \right]}}} \end{array} $
(5) 由此得到D与d的关系如图 10所示[16],转折镜到其后第1个球面镜距离d1=196mm, m0=d1/r。可知,光束偏移量D与微动距离d满足线性关系。
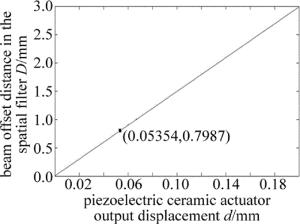
Figure 10. Relationship between D and d
激光器发生光路失调时,激光光斑在空间滤波器处的偏移距离D不会超过空间滤波器的狭缝宽度0.8mm,从图中可得对应的d=54μm。采用PA 100/T14型压电陶瓷微位移驱动器,如图 11所示。最大驱动距离为105μm,驱动电压-10V~120V,满足转折镜调节的光束整形补偿调节系统的设计需要。

Figure 11. PA 100/T 14 driver
-
分别对不加调节系统和加外光路补偿调节系统的情况进行了测试实验,测得不同占空比下,两种不同情况对应输出功率,如表 3所示。可知,随着PWM占空比的升高,外光路补偿调节系统作用越来越明显,尤其当PWM占空比超过50%后,最大功率补偿差值达到了168W。分别采集了补偿调节前后占空比为15%, 35%, 55%, 75%时的光斑模式,得到如图 12所示的对比图。由对比可知,没有外光路补偿调节条件下,在占空比为15%时基本没有旁瓣,在占空比为35%, 55%, 75%时均有旁瓣,且占空比越高,光斑旁瓣的尺寸越大。经过外光路补偿调节后,各占空比下的光斑旁瓣均无旁瓣,表明外光路调节系统对光斑模式的补偿效果明显。
Table 3. Laser output power at different duty cycle before and after adjustment
No. duty cycle/% power before
adjustment/Wpower after
adjustment/Wpower deviation
value/W1 5 252 260 8 2 15 598 607 9 3 25 897 924 27 4 35 1230 1267 37 5 45 1550 1626 76 6 55 1810 1939 129 7 65 2026 2130 104 8 75 2115 2283 168 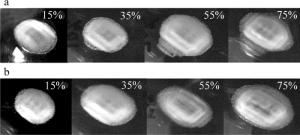
Figure 12. Light spot at different duty cycles before and after compensation and adjustment
-
激光器拷机实验4h,保持90%占空比的注入功率不变,观察输出激光功率波动。转折镜调节补偿前后输出功率变化如表 4所示。当占空比达到90%时,注入功率基本达到最大,腔镜形变导致输出光束偏移,偏离滤波器中心,部分光束无法穿过滤波器,如果不进行转折镜调节补偿,整形后激光功率下降18%。进行转折镜调节后,激光输出功率波动不超过2%,这说明转折镜调节系统明显降低了整形系统激光功率损失,提高了稳定性。
Table 4. Volatility of laser output power before and after adjustment
No.time/
minpower before
adjustment/Wvolatility before
adjustment/%power after
adjustment/Wvolatility after
adjustment/%1 30 2718 0 2764 0 2 60 2661 2.1 2730 1.2 3 90 2600 4.3 2736 1.0 4 120 2537 6.7 2749 0.5 5 150 2467 9.2 2711 1.9 6 180 2401 11.7 2738 0.9 7 210 2322 14.6 2765 -0.03 8 240 2230 18.0 2731 1.2 -
实验研究了对3kW射频板条CO2激光器的功率检测与反馈控制,包括硬件电路、抗干扰设计,采用转折镜调节方法实现了外光路偏移补偿。
(1) 进行了功率检测系统的硬件预测电路和放大电路、抗干扰设计、测试实验,测得功率检测系统与基准激光功率计的功率值偏差最大为9W,优于基准功率计的分辨率,功率检测系统具有较高的线性度。
(2) 采用转折镜调节输出光束相对光轴的偏移量,当激光功率调制器PWM占空比为15%, 35%, 55%, 75%时,经过光路补偿自适应调节后,光束穿过滤波器中心后均无旁瓣,整形后光斑模式补偿效果明显。
(3) 3kW射频板条CO2激光器4h拷机,当注入功率占空比为90%时,对比转折镜调节前后,穿过滤波器后激光输出功率的波动,输出功率波动率从18%降到2%,实现了整形光束的激光功率稳定输出。
3kW射频板条CO2激光器功率稳定性的研究
Research of power stability for 3kW RF slab CO2 laser
-
摘要: 为了解决3kW射频板条CO2激光器在高功率工作条件下功率波动的问题,采用外光路转折镜调节方法对腔镜热畸变造成的光路偏移进行补偿。研究了基于芯片TMS320LF2407的脉宽调制器控制激光器注入功率的关键技术,设计了整形光路尾镜取样功率检测系统,并分析了外光路自适应调节系统的补偿原理。结果表明,整形光路尾镜取样功率检测系统与基准功率计的最大误差为±2.59%,其具有高线性度;采用PA 100/T 14型压电陶瓷微位移驱动器,对微动距离不超过54μm的自适应调节转折镜进行调节补偿,光束偏移不会超出空间滤波器的0.8mm狭缝宽度;调节补偿前后输出功率波动由18%降到2%,达到了由于腔镜热变形导致光束偏移的补偿要求,整形光束的旁瓣消失,获得最佳模式输出。此项研究对提高激光器输出功率稳定性具有一定的实用价值。Abstract: In order to solve the power fluctuation problem of 3kW RF slab CO2 laser at high power operating conditions, a turning mirror adjusting method of out light path was adopt to compensate the light beam deviation caused by thermal deformation of cavity mirrors. The key technology of laser input power control by pulse width modulator based on TMS320LF2407 chip was studied. End mirror sampling power detection system of shaping light path was designed. And the compensation theory of out light adaptive regulation system was analyzed. The result shows that, the end mirror sampling laser power detection system of shaping light path has high linearity and the maximum error compared with reference power meter is ±2.59%. when using a piezoelectric ceramics microdisplacement driver of PA 100/T 14 to adjust and compensate the adaptive turning mirror with micro-motion distance less than 54μm, the light beam deviation will be less than 0.8mm of slit width of spatial filter. After adjustment and compensation, the output power fluctuation declines from 18% to 2%, and reaches the compensation demand of beam deviation caused by thermal deformation of cavity mirror. The sidelobe of shaping light disappears and the best output mode is gotten. The research has the practical value for improvement of laser stead output power.
-
Figure 3. Laser power detection system
a—shielding box of signal amplified circuit PCB and pyroelectric detector b—schematic of laser power detection system
Figure 4. Principle diagram of amplifier circuit
a—pre-amplifier circuit b—noise model of amplifier
Figure 8. Deviation adjustment of out light path and light path(1—turning mirror; 2—spherical mirror; 3—spatial filter; 4—cylindrical mirror)
a—side view of beam shaping system b—before adjusting optical path deviation c—after adjusting optical path deviation
Figure 12. Light spot at different duty cycles before and after compensation and adjustment
a—before compensation and adjustment b—after compensation and adjustment
Table 1. Parameters of thermoelectric detector
parameter name value wavelength 0.19μm~20μm input power peak 150W noise equivalent power 1mW response time 2.8s sensitivity 0.64mV/W  下载: 导出CSV
下载: 导出CSV
Table 2. Relationship between reference power meter and power detection system
reference
power value/Wpower value
of detection
system/Wdeviation
value/Wpercentage
of deviation value/%0 0 0 0 270 263 7 2.59 420 412 8 1.90 615 610 5 0.81 765 760 5 0.65 930 926 4 0.43 1110 1101 9 0.81 1275 1270 5 0.39 1440 1437 3 0.21 1620 1614 6 0.37 1755 1758 -3 -0.17 1890 1893 -3 -0.15 2025 2030 -5 -0.25 2130 2135 -5 -0.23 2220 2224 -4 -0.18 2250 2252 -2 -0.09
下载: 导出CSV
Table 3. Laser output power at different duty cycle before and after adjustment
No. duty cycle/% power before
adjustment/Wpower after
adjustment/Wpower deviation
value/W1 5 252 260 8 2 15 598 607 9 3 25 897 924 27 4 35 1230 1267 37 5 45 1550 1626 76 6 55 1810 1939 129 7 65 2026 2130 104 8 75 2115 2283 168
下载: 导出CSV
Table 4. Volatility of laser output power before and after adjustment
No.time/
minpower before
adjustment/Wvolatility before
adjustment/%power after
adjustment/Wvolatility after
adjustment/%1 30 2718 0 2764 0 2 60 2661 2.1 2730 1.2 3 90 2600 4.3 2736 1.0 4 120 2537 6.7 2749 0.5 5 150 2467 9.2 2711 1.9 6 180 2401 11.7 2738 0.9 7 210 2322 14.6 2765 -0.03 8 240 2230 18.0 2731 1.2
下载: 导出CSV
-
[1] TANG X H. High power transverse flow CO2 laser and its applications[M].Wuhan:Huazhong University of Science and Technology Press, 2008:1-16(in Chinese). [2] LI Q G. Real-time detection and control of laser power for RF slab CO2 laser[D]. Wuhan: Huazhong University of Science and Technology, 2012: 4-6(in Chinese). [3] LIU J, HE C Y, LI J. Power detection and control system for high power CO2 laser[J].Laser Technology, 2003, 27(6):588-590(in Chinese). [4] PENG D F, WANG Y Q, LI B. Real-time power measurement and control system of high power CO2lasers[J]. Laser Technology, 2006, 30(5):483-485(in Chinese). [5] HANG M M. Researches on compensation of shaping optics for RF slab CO2 laser[D].Wuhan: Huazhong University of Science & Technology, 2014: 5-8(in Chinese). [6] WANG Z, HANG M M, PENG H, et al. Research of adaptive regulation of shaping optics in radio frequency slab CO2 lasers[J]. Laser Technology, 2015, 39(4):471-475(in Chinese). [7] LIU J. Research on exciting characteristics of high power radio frequency CO2 laser[D]. Wuhan: Huazhong University of Science and Technology, 2009: 14-15(in Chinese). [8] LI L. Study on pulse width modulation signals for high power RF-excited CO2 laser[D]. Wuhan: Huazhong University of Science and Technology, 2009: 6-10(in Chinese). [9] LIAO F. Research on power control technology of high power laser RF power supply[D]. Wuhan: Huazhong University of Science and Technology, 2011: 6-8(in Chinese). [10] YUAN J K. Research on surface coating and discharge control of electrode for RF slab CO2 laser[D]. Wuhan: Huazhong University of Science and Technology, 2013: 1-6(in Chinese). [11] HE Z X. Photoelectric signal processing[M]. Wuhan:Huazhong University of Science and Technology Press, 2008:32-34(in Chinese). [12] YE X Y, WANG S L, HE Y G. Power controlling and the controller design for RF excited CO2 Lasers[J]. Journal of Optoelectronics·Laser, 2001, 12(2):151-153(in Chinese). [13] ZHU L, WANG S L, YANG H, et al. Design and principle of power controlling circuit for RF CO2 laser[J]. Optics & Optoelectronic Technology, 2003, 1(3):41-43(in Chinese). [14] YU J, ZHAI Y W, SUN L M. Research on TL494 pulse-width modulation integrated circuit[J]. Journal of Jilin Institute of Chemical Technology, 2005, 22(3):47-49(in Chinese). [15] XIAO L S, TANG X H, QIN Y X, et al. Shaping characteristics of output beam of 2kW radio frequency slab CO2 laser[J].Chinese Journal of Lasers, 2014, 41(4):0402008(in Chinese). doi: 10.3788/CJL [16] ZHANG Z Y, YANG Z Y. MATLAB tutorial[M].Beijing:Beihang University Press, 2006:175-176(in Chinese). -

 点击查看大图
点击查看大图

计量
- 文章访问数: 7070
- HTML全文浏览量: 4927
- PDF下载量: 324
- 被引次数: 0
