
Study on energy transmission law of water-laser coupling in water-jet guided laser technology
-
摘要: 水-光耦合传输效率是实现水导激光可加工性的前提与效率保证。为了研究水导激光中水-光耦合传能规律, 得到较高的水束中激光功率传输效率和均匀的激光功率密度分布, 采用光线追迹原理及物理光学传播方法, 仿真分析了1064nm激光束聚焦后的光束特性及水-光耦合后水束中激光光斑分布形态, 并对不同水束长度下激光功率传输效率, 以及不同功率、压力和水束长度下激光功率密度分布情况进行了系统的实验检测分析。结果表明, 随着水束长度的减小, 1064nm激光在水束中功率传输效率越高, 在水束长度为20mm时, 激光功率传输效率可达63.6%;激光功率的变化对水束中激光功率密度分布影响最大; 当激光功率不变时, 在水束稳定长度范围内水压的增大有利于水束中激光功率密度均匀化分布, 而耦合水束长度的减小可以提高激光传输效率。研究结果为提高水导激光中能量利用率有一定的指导意义。Abstract: Water-laser coupling transmission efficiency is the premise and efficiency guarantee of water-jet guided laser machinability. In order to study the law of water-laser coupling energy transmission in water-jet guided laser, and to obtain high laser power transmission efficiency and uniform laser power density distribution in water beam, by using ray tracing theory and physical optics propagation method, the simulation analysis of the focused beam characteristics at 1064nm and the speckle beam pattern after coupling were carried out. And the laser power transmission efficiency under different water beam length, the distribution of laser power density under different power, pressure and water beam length were tested and analyzed systematically. The results show that the power transmission efficiency of 1064nm laser increases with the decrease of the water beam length, and the power transmission efficiency can reach 63.6% when the water beam length is 20mm. The variation of laser power has the greatest influence on the distribution of laser power density in water beam. When the laser power is constant, the increase of water pressure is beneficial to the uniform distribution of laser power density in the stable length of water beam, and the decrease of coupled water beam length can improve laser transmission efficiency. The research results provide some guidance for improving the energy utilization rate of water guided laser.
-
引言
SF6气体是一种具有良好绝缘和灭弧能力的惰性气体,广泛应用于变压器、互感器、高压开关等电气设备中[1-2]。但是SF6在强烈的电晕、电弧放电等条件下会分解产生氟化氢等腐蚀性剧毒物质,危害公共健康,同时腐蚀性分解物以及高温、老化等因素会诱发电力设备损坏,引起SF6泄漏,降低电气设备的绝缘和灭弧性能,严重威胁电气设备的安全稳定运行。SF6还是一种温室气体,其全球变暖潜能值(global warming potential,GWP)是CO2的23900倍,在可预见的未来排放到大气中的SF6会持续加重全球变暖[3]。为了减少SF6排放、保证电力系统安全运行,需要对电力场所中SF6浓度进行有效监测。
目前SF6的检测方法主要有气体密度检测技术[4]、红外吸收光谱技术[5]、气相色谱技术等。这些技术都存在一定不足,不能完全满足SF6监测需要,例如:气体密度检测技术检测误差较大;红外吸收光谱技术测量浓度范围较小;气相色谱技术耗时较长且很难实现现场检测。光声光谱(photoacoustic spectroscopy,PAS)技术具有灵敏度高、选择性好、检测浓度范围大等优点,广泛应用于工农业生产[6-7]、环境监测[8-10]、生物医学[11-13]等众多领域的气体检测[14-15]。近年来,运用光声技术检测SF6气体逐渐成为研究热点,东北电力大学[16-17]、西南科技大学[18]、意大利巴里理工[19-21]、伊朗德黑兰理工[22-23]等研究单位都在这方面做了一定工作,在灵敏度方面达到了10-9甚至10-12量级,但这些研究中,SF6检测的背景气采用的主要是N2等红外波段吸收极弱的气体,并没有考虑到大气环境下空气自身吸收的影响。实际上空气自身在红外波段有一定的吸收能力。实测结果表明, 空气自身的光声信号与体积分数为0.1×10-6的SF6气体基本相当,而传统的单谱线光声光谱气体检测技术在大气环境下的检测灵敏度受到严重限制。
本文中基于光声光谱技术,结合大气环境的检测条件,基于波长可调谐CO2激光器设计了一套具有良好稳定性的SF6泄漏检测系统,并在此基础上参照差分吸收光谱法提出一种差分光声光谱技术,以尽量降低空气自身光声信号及电噪声、背景噪声的影响,提升光声检测的灵敏度。
1. 光声光谱气体检测系统
1.1 检测系统总体结构
所设计SF6光声检测系统包括光源、光声腔和光声信号检测处理3个模块,其结构示意图见图 1。该光声检测系统中光源使用的是相干公司GEM SELECT-100型波长可调谐CO2激光器,其激光束半径为1.9mm±0.2mm,光束发散角为5mrad。在光声信号检测处理模块中并没有使用放大器,而是将驻极体麦克风检测到的光声信号滤波后直接输出,在后续研究中可以通过增加放大器的方式进一步提升所设计光声检测系统的灵敏度。
在工作时,CO2激光器输出确定波数的强度调制光,经偏振衰减器后照射光声腔内气体,气体分子周期性吸收光能激发和无辐射弛豫放热,使腔内气体周期性胀缩产生热声波,再经麦克风检测转换为电信号,所获电信号经过数据处理后便可得出SF6气体的体积分数。
1.2 SF6检测谱线的选择
SF6气体检测谱线的选择需要同时考虑吸收谱线的强度和位置,较高的吸收强度可以有效提高光声信号幅值,适当的吸收谱线位置则可以尽量避开干扰气体的吸收峰,从而降低光声系统总体噪声。图 2是在1.01×105Pa(1atm)、20℃条件下基于HITRAN数据库[24]计算的体积分数为0.1×10-6的六氟化硫(SF6)和标准空气[7]的红外吸收光谱。考虑其吸收光谱的强度和位置,可选择947.777cm-1和947.93cm-1[14-21]两条谱线。
在图 2中,还以点的形式标出了CO2激光输出谱线处SF6及标准气的吸收强度。由图 2可见,在CO2激光器每一个输出谱线位置,空气均有一个强度在10-6 cm-1(0.1MPa)-1(10-6cm-1·atm-1)量级的吸收峰,该数值约为体积分数为0.1×10-6的SF6吸收系数的20%左右,在光声检测时空气自身的光声效应会产生严重影响,因此本文中以空气作为背景气体,研究了大气环境下光声光谱检测的实际情况。
之前SF6检测谱线主要选择的是947.777cm-1和947.93cm-1,但由图 2可以看出, 947.93cm-1并不是CO2激光器的输出谱线。结合CO2激光器输出谱线位置及SF6吸收强度,同时避开标准空气的吸收峰位置,本文中选用10P16(947.777cm-1)和10P12(951.203cm-1)作为检测谱线,如图 2所示。
1.3 光声腔设计
本文中所设计SF6光声检测系统采用的是不锈钢材质的圆柱形1阶纵向光声腔,其结构如图 3所示,主要由共振腔、缓冲室和窗镜组成。本研究在设计过程中,为了保障光声腔具有良好的声共振特性,需要选取适当的共振频率和腔常数。
共振频率是描述光声腔工作状态的参量,以共振频率调制光源可使光声腔工作于共振态,此时光声信号有极大值[25]。共振频率与光声腔几何尺寸的关系可表示为:
{f_{100}} = \frac{{{v_{\rm{s}}}}}{{2\left[ {L + 16R/\left( {3{\rm{ \mathsf{ π} }}} \right)} \right]}} (1) 式中,f100是1阶纵向光声腔的共振频率,vs是腔内气体中的声速,L和R分别为共振腔长度和半径。由(1)式可知,相同条件下共振频率随共振腔长度和半径的增大而减小。另外,在选取共振频率时,需要考虑系统的低频噪声和传声器的频率响应,为了较好地抑制低频噪声(1/f噪声),一般要求光声腔共振频率高于1kHz,光声腔共振频率的上限则取决于传声器的频率响应特性,一般取所使用传声器频率响应平坦区间的最大频率,在本文中其数值为5kHz。
腔常数表征了光声腔将腔内气体吸收的光能转化为声能的能力[25],对于工作于共振频率的1阶纵向光声腔其腔常数表示为:
{C_{100}} = \frac{{2\left( {{\rm{ - 1}}} \right){Q_{100}}L}}{{{{\rm{ \mathsf{ π} }}^2}{V_{{\rm{cell}}}}{f_{100}}}} (2) 式中,C100为1阶纵向光声腔的腔常数,Vcell为共振腔体积,Q100为光声腔品质因数,γ=cp/cV为定压比热cp与定容比热cV之比。
品质因数Q描述了光声腔内能量积累与损耗的比例关系[25],其值可由下式计算得到:
{Q_{100}} = \frac{R}{{{\mathit{\delta }_{\rm{v}}} + \left( {\mathit{\gamma } - 1} \right){\mathit{\delta }_{{\rm{th}}}}\left( {1 + 2R/L} \right)}} (3) 式中,δv为粘性边界层,且{\mathit{\delta }_{\rm{v}}} = \sqrt {2\mathit{\eta /}\left( {\mathit{\rho }\omega } \right)} ;δth为热边界层厚度,且 {\mathit{\delta }_{{\rm{th}}}} = \sqrt {2\mathit{\kappa /}\left( {\mathit{\rho \omega }{\mathit{c}_\mathit{p}}} \right)} ;η为气体的粘滞系数; ρ为气体密度; ω=2πf为调制角频率; κ为气体的热导率。
由(2)式绘制了不同半径光声腔腔常数与腔长的关系图,结果如图 4所示。
![Figure 4. Relationship between photoacoustic cell constant and resonator length with different resonator radius]() Figure 4. Relationship between photoacoustic cell constant and resonator length with different resonator radius
Figure 4. Relationship between photoacoustic cell constant and resonator length with different resonator radius由图 4可知,共振腔半径越小及腔长越长时,腔常数越大。但腔常数主要取决于共振腔半径,而在实际条件下,共振腔半径不可能无限小,其最小值取决于激光束半径。综合考虑光声腔共振频率和腔常数,选取共振腔长为160mm,半径为3mm。在20℃, 0.1MPa, 空气为载气的条件下,空气中声速为349.2m/s,此时该尺寸光声腔仿真获得的共振频率为1058Hz,品质因数为31,腔常数为87.49Pa·m·W-1。
为确定制作完成的光声腔的实际共振频率和腔常数,实验测量了光声腔的频率响应曲线,结果如图 5所示。图中实线是对采样点数据进行洛伦兹拟合的结果,由拟合结果可知,光声腔的实测共振频率为1066Hz,这与仿真值有一定差异。分析原因是由于:(1)光声腔加工中会产生的一定的尺寸误差;(2)实验时温度与仿真取值不同而使得声速比仿真值略大,从而造成共振频率偏移,可见温度对光声信号的影响。但通过在实际实验过程中对环境温度的监测,由于环境温度变化较小,对实验结果准确性的影响不大。
图 5中, 标出的33.27Hz是光声腔频率响应曲线\sqrt {1/2} 高度处的全线宽,由共振频率除以该全线宽便可计算出品质因数为32.04。此外通过光声信号表达式结合光声信号幅值、SF6气体体积分数、入射光功率等参量可以反演计算出腔常数为89.74Pa·m·W-1。光声腔腔常数的实测值与仿真值间出现误差主要是因为:(1)温湿度等环境参量与仿真时所取值不同,造成共振频率偏移;(2)光声腔内壁的粗糙度难以达到理想情况;(3)仿真时所取得诸如动力粘度、导热系数等参量均为近似值,与实验条件下的实际参量并不相等。但总体而言,制作的不锈钢光声腔的特性参量仿真值与实验值基本一致,光声腔腔常数较高,符合设计预期。
2. 实验结果与分析
2.1 单谱线光声SF6气体检测
为对比差分光声光谱技术与传统单谱线光声光谱技术的灵敏度,首先在所设计光声检测系统上做了单谱线光声光谱法SF6检测的相关实验。选取远离标准空气吸收峰谱线的SF6吸收谱线为951.203cm-1位置处检测,并在3W光功率下测量获得的光声信号与SF6气体体积分数的关系如图 6中圆点所示。
由图 6可见,在体积分数为60×10-6以下时,光声信号与浓度呈良好的线性关系,但在更高浓度时光声信号出现了类似饱和的现象。这是因为体积分数高时,SF6对入射激光吸收强烈,此时光声腔中激光功率在纵向上有明显的指数分布,其激励的模式与均匀光功率时的1阶纵向模式完全不同,此外共振腔中激光功率要明显小于入射光功率,故而光声信号幅值不再随体积分数线性增加。为验证上述推论,通过朗伯-比尔定律结合入射光功率,计算出共振腔中部的光功率,并以此功率与入射光功率间的比值修正所测光声信号幅值,修正后的结果如图 6中方形点所示。
由图 6可见,在对光声信号进行修正后,其在较高体积分数时恢复了近乎线性的增长,这证明前面的分析是正确的。但即使修正后,在高体积分数时光声信号增长趋势仍比低体积分数时较缓,这是因为前面提到的光声腔中激发的共振模式因功率不均匀而受到破坏。将体积分数为60×10-6以内修正后的数据提出,单独做线性拟合,可以获得的光声信号幅值SPA与SF6的体积分数c的关系式为:
{S_{{\rm{PA}}}} = 0.0408 \cdot c + 0.0028 (4) 式中,光声信号SPA单位为伏特,0.0028为噪声项。为对比噪声项的拟合值与实验值,也为后续灵敏度计算方便,测定了所设计光声系统的总体噪声,实验中激光波数、功率和调制信号与定标时相同。需要指出的是,为了模拟环境噪声,在光声检测装置周围打开了一些诸如机械泵的设备,测量结果如图 7所示。
由图 7可见,光声检测系统的总体噪声约为2.3mV,波形呈正弦状,且频率与光源调制频率相同,这表明所设计光声检测系统的噪声主要来自背景噪声和空气自身的光声信号。
依据定标实验中体积分数为1×10-6的SF6标准气的光声信号数据和系统噪声幅值,结合灵敏度的表达式:cmin =c/RSNR,可以得出所设计光声检测系统在951.203cm-1处对六氟化硫气体的检测灵敏度约为0.06×10-6(体积分数)。
2.2 差分光声光谱技术
传统单谱线光声检测法对SF6气体的检测灵敏度可达10-9甚至10-12量级,但是以上灵敏度是在氮气等红外波段吸收极弱气体作为背景气的条件下获得的,并没有考虑背景气体的影响。实际上,由图 6和图 7可知,空气自身光声效应所产生的噪声与10-7量级SF6的光声信号基本相当,故单谱线光声技术无法在大气条件下实现10-12或10-9量级的SF6检测。为突破空气自身光声效应对光声检测法灵敏度的限制,本文中基于波长可调谐CO2激光器,提出了一种基于双谱线检测差分光声光谱技术。
实验中在951.203cm-1和947.777cm-1处分别对SF6气体体积分数进行定标,需要指出的是:在947.777cm-1处的数据对吸收光功率做修正后,对两波数入射光功率的差异也做了修正。两波数处光声信号与SF6体积分数的关系数据见于图 8。
![Figure 8. Corrected relationship between photoacoustic signal and SF6 concentration at 951.203cm-1 and 947.777cm-1]() Figure 8. Corrected relationship between photoacoustic signal and SF6 concentration at 951.203cm-1 and 947.777cm-1
Figure 8. Corrected relationship between photoacoustic signal and SF6 concentration at 951.203cm-1 and 947.777cm-1图 8中分别对两波长的定标实验数据进行了拟合,拟合优度均达到了99.9%,拟合获得的光声信号表达式为:
{S_{{\rm{PA, 1}}}} = 0.0408 \cdot c + 0.0028 (5) {S_{{\rm{PA, 2}}}} = 0.0791 \cdot c + 0.0035 (6) 两式作差得:
c = \frac{{{S_{{\rm{PA, 2}}}} - {S_{{\rm{PA, 1}}}} - 0.0007}}{{0.0382}} (7) 该式即为差分光声光谱SF6气体检测体积分数的表达式。
定标之后于951.203cm-1处分别测得体积分数为1×10-6和体积分数为10×10-6的SF6标准气的光声信号,修正后的结果分别0.044V和0.4035V,再检测947.777cm-1处相同SF6标准气的光声信号,修正后所得光声信号幅值分别为0.0818V和0.8047V,将上述实验结果代入(7)式,得到的体积分数分别为0.97×10-6和10.4×10-6,与标准气体的体积分数误差较小,这说明差分光声光谱的准确性相对较好。
由体积分数为1×10-6的SF6的实验数据,结合灵敏度计算公式可以计算出采用差分光声光谱法后灵敏度的值为0.02×10-6(体积分数),相较于单谱线光声检测法的测量结果检测线灵敏度略有提升,若采用空气吸收更为接近的两条谱线,则噪声项近乎为零,那时将可进一步提升灵敏度。
3. 结论
采用波长可调谐CO2激光器设计了一套能够在大气环境下检测SF6的光声检测系统,文中对所设计光声系统的基本参量及检测特性做了详细分析,主要成果如下:(1)运用所设计光声系统对SF6体积分数做单谱线光声检测,并就检测过程中发现的高体积分数时光声信号类似饱和现象,提出了通过修正腔中光功率进而修正光声信号的方法,并基于实验数据计算出单谱线检测时,光声系统对SF6气体检测的灵敏度为0.06×10-6(体积分数);(2)提出了差分光声光谱技术,从实验结果看,采用该方法后所设计光声系统对SF6的灵敏度为0.02×10-6(体积分数),灵敏度确实有所提高,且如果选用空气吸收更为接近的谱线,则可进一步提升光声系统的灵敏度。
-
![]()
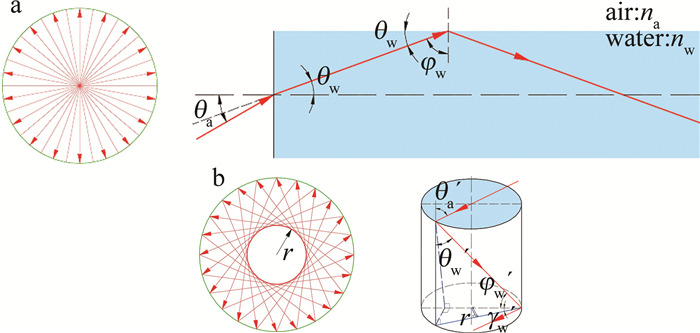
Figure 4. Analysis of light transmission type after laser coupled water beam fiber
a—meridional ray b—oblique ray
![]()
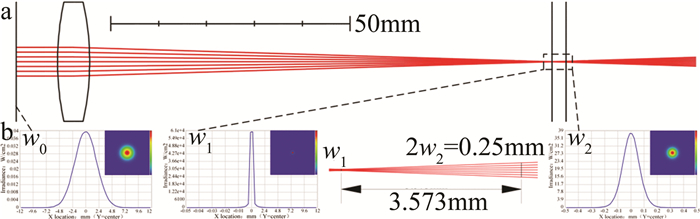
Figure 5. Simulation of Gaussian beam focusing
a—ray tracing b—light spot and light spot section curve on each surface
![]()
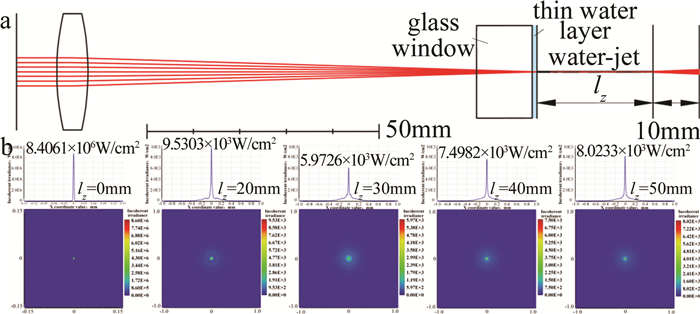
Figure 6. Simulation of focusing laser and water-jet coupling
a—ray tracing b—laser power density distribution on each surface
![]()
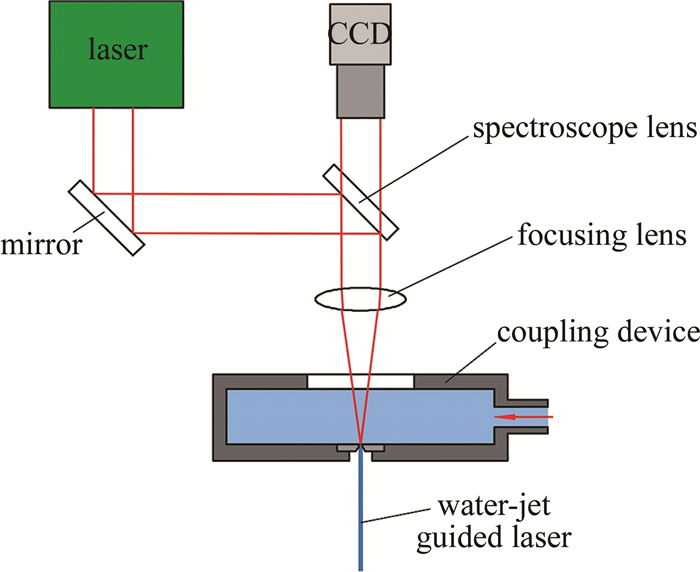
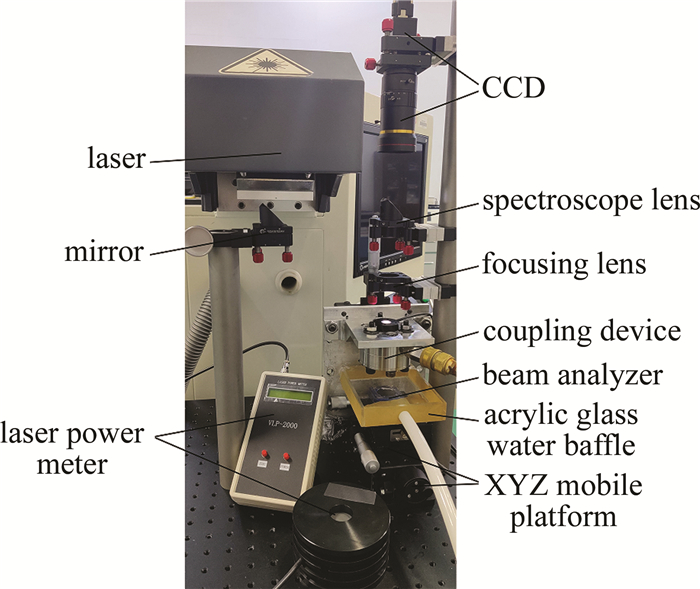
Figure 7. Schematic diagram of the whole structure of the water-jet guided laser system
![]()
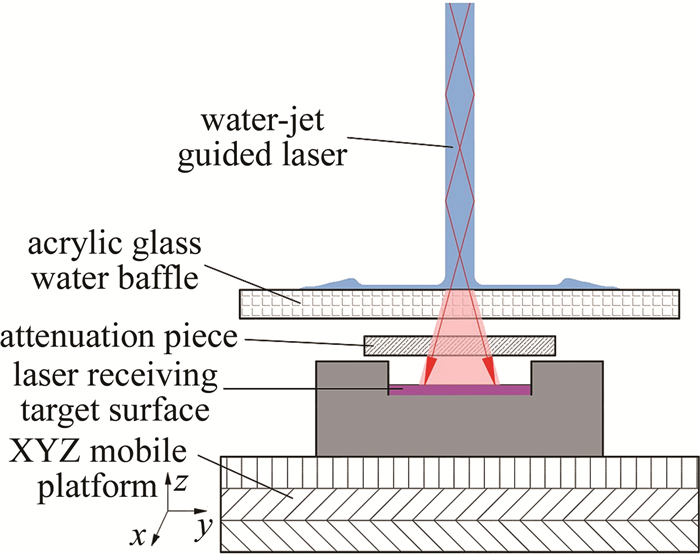
Figure 8. Schematic diagram of laser power and density distribution detection in water beam
![]()
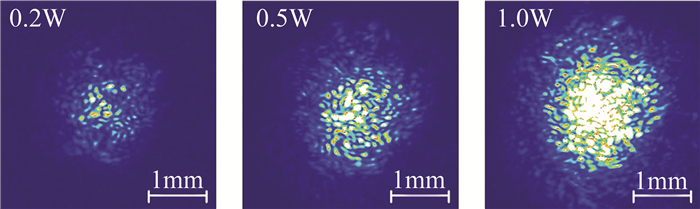
Figure 10. Distribution diagram of laser power density in water-jet with diffe-rent power when water pressure is 1MPa and coupling transmission length is 20mm
![]()
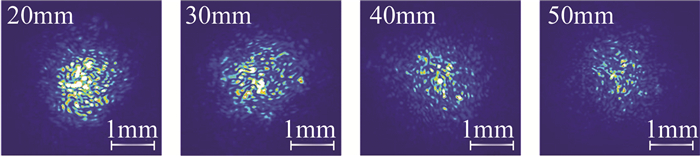
Figure 11. Distribution diagram of laser power density in water-jet with diffe-rent power when laser power is 0.5W and coupling transmission length is 40mm
![]()
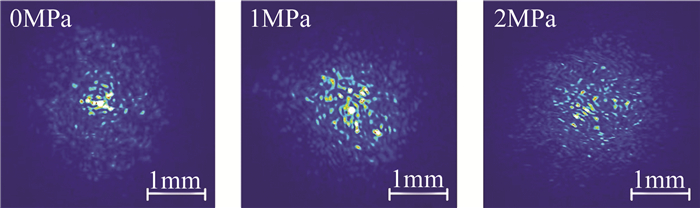
Figure 12. Distribution diagram of laser power density in water-jet with diffe-rent power when laser power is 0.5W and water pressure is 1MPa
![]()
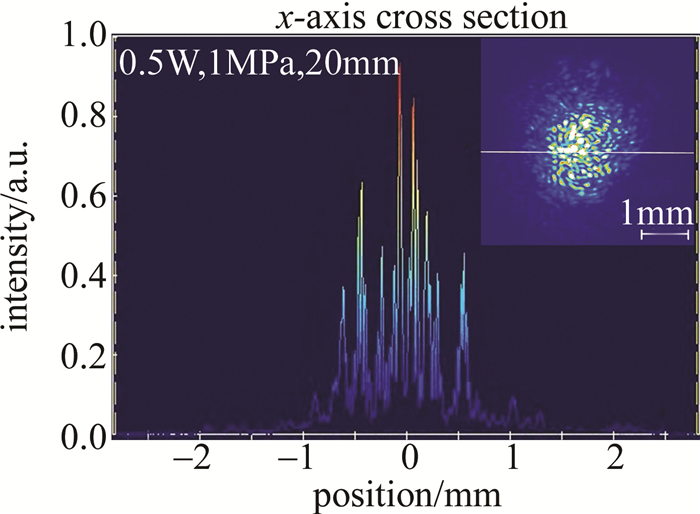
图 13 x-axis cross section relative light intensity distribution of laser spot in water beam
Table 1 Laser power before and after laser coupling with water-jet
outgoing laser power P0/W laser power before coupling P1/W laser power of different water-jet lengths Pz/W 20mm 30mm 40mm 50mm 1 0.920 0.538 0.466 0.408 0.337 2 1.836 1.074 0.950 0.800 0.668 3 2.716 1.586 1.405 1.233 0.984 efficiency ηz/% 63.6 55.9 48.2 39.5  下载: 导出CSV
下载: 导出CSV
-
[1] SUBASI L, DIBONIE J, GUNAYDIN A, et al. Water jet guided laser microdrilling of aerospace alloys: Correlation of material properties to process time and quality[J]. Journal of Laser Applications, 2021, 33(1): 012015. DOI: 10.2351/7.0000302
[2] MARIMUTHUL S, SMITH B. Water-jet guided laser drilling of thermal barrier coated aerospace alloy[J]. The International Journal of Advanced Manufacturing Technology, 2021, 113(1/2): 177-191.
[3] COLLADON D. On the reflections of a ray of light inside a parabolic liquid stream[J]. Comptes Rendus, 1842, 15: 800-802.
[4] HECHT J. City of the light: The story of fiber optics[M]. New York, USA: Oxford University Press, 1999: 17-27.
[5] RICHERZHAGEN B. Method and apparatus for machining with a liquid-guided laser beam: US 5902499[P]. 1999-05-11.
[6] RICHERZHAGEN B. Chip singulation process with a water jet-guided laser[J]. Solid State Technology, 2001, 44(4): S25-S28.
[7] NITIN S. The first coupling of a laser beam to a water jet[J]. Photonics Views, 2021, 18(1): 72-76. DOI: 10.1002/phvs.202100014
[8] QIAO H Ch, CAO Zh H, CUI J F, et al. Experimental study on water jet guided laser micro-machining of mono-crystalline silicon[J]. Optics and Laser Technology, 2021, 140: 107057. DOI: 10.1016/j.optlastec.2021.107057
[9] SPIEGEL A, VAGO N, WAGNER F R. High efficiency Raman scattering in micrometer-sized water jets [J]. Optical Engineering, 2004, 43(2): 450-454. DOI: 10.1117/1.1634292
[10] SALENKO A, KHOLODNYI V. The water jet guided laser method in punching honeycomb cores for aerospace sandwich panels[J]. Eastern-European Journal of Enterprise Technologies, 2016, 1(5): 19-30.
[11] COUTY P, WAGNER F R, HOFFMANN P. Laser coupling with a multimode water-jet waveguide[J]. Optical Engineering, 2005, 44(6): 068001. DOI: 10.1117/1.1928280
[12] COUTY P, SPIEGEL A, VAGO N, et al. Laser-induced break-up of water jet waveguide[J]. Experiments in Fluids, 2004, 36(6): 919-927. DOI: 10.1007/s00348-003-0775-x
[13] LI Ch Q. Reserch on water-jet guided laser micromachining system and key technologies[D]. Harbin: Harbin Institute of Technology, 2012: 38-54(in Chinese).
[14] ZHANG Y H, LU T F, LIU Y X, et al. Intensities of non-uniformly polarized beams in the oceanic turbulence[J]. Laser Technology, 2020, 44(3): 310-314(in Chinese).
[15] DENG Ch, YEO H, KI H. Electrodynamic simulation of laser beam propagation in waterjet-guided laser processing[J]. Optics Express, 2020, 28(8): 11128-11143. DOI: 10.1364/OE.389497
[16] ZHANG G Y, ZHANG Zh, WANG Y F, et al. Gas shrinking laminar flow for robust high-power waterjet laser processing technology[J]. Optics Express, 2019, 27(26): 38635-38644. DOI: 10.1364/OE.378328
[17] GHASSEMIEH E, VERSTEEG H K, ACAR M. Effect of nozzle geo-metry on the flow characteristics of hydroentangling jets[J]. Textile Research Journal, 2003, 73(5): 444-450. DOI: 10.1177/004051750307300512
[18] YANG L F, JIAO H, HUANG Y X, et al. Simulation study of the flow field in the plane convergent nozzle based on the water guide laser[J]. Laser Technology, 2020, 44(6): 726-731(in Chinese).
[19] ANANTHARAMAIAH N, TAFRESHI H V, POURDEYHIMI B. A study on flow through hydroentangling nozzles and their degradation[J]. Chemical Engineering Science, 2006, 61(14): 4582-4594.
[20] LIU Y, WEI M R, ZHANG T, et al. Overview on the development and critical issues of water jet guided laser machining technology[J]. Optics and Laser Technology, 2021, 137: 106820.
-
期刊类型引用(13)
1. 马博华,杨尹. 基于激光传感器的室内舒适度智能控制系统设计. 激光杂志. 2021(12): 197-201 .  百度学术
百度学术
2. 马佳博,王成玥,陈峰. 加激光选区熔化成形技术的产品设计三维模型研究. 激光杂志. 2020(05): 134-138 . 百度学术
3. 宋姗姗,刘韦. 基于激光技术的无线传感系统容错目标定位设计. 激光杂志. 2020(06): 36-39 . 百度学术
4. 潘森,高婧婧,许孝芳,毕勇,李金鹏. 多星敏感器地面热漂移标定位置误差检测研究. 激光技术. 2020(06): 664-667 . 本站查看
5. 许爽,周铜. 电动汽车锂电池电源故障激光传感器设计. 激光杂志. 2019(03): 168-171 . 百度学术
6. 吴耕锐,郭三学,薄鸟,刘永利. 基于激光传感器的多应急救援车辆运输路径优化识别系统设计. 激光杂志. 2019(06): 88-92 . 百度学术
7. 李亚红,冯东华. 激光传感网络恶意代码主动检测系统设计. 激光杂志. 2019(06): 212-215 . 百度学术
8. 郑新建,刘玲玲. 基于激光传感器采集信息的电气设备状态分析研究. 激光杂志. 2019(07): 179-183 . 百度学术
9. 蒋天堂,杜焰. 基于激光传感器实时数据的交通信号灯控制优化研究. 激光杂志. 2019(09): 155-158 . 百度学术
10. 李房云,赵巍. 基于激光传感器数据的机器人工作路径智能控制. 激光杂志. 2019(09): 147-150 . 百度学术
11. 彭军,陈鑫源. 基于激光位移传感器的数据高速处理系统设计. 激光杂志. 2019(12): 107-109 . 百度学术
12. 韩春光,蔡彤琛,时广华,王科峰,汪志成. 基于向量积同向技术的改进APIT定位算法. 激光技术. 2018(03): 395-399 . 本站查看
13. 杨喜良,邵磊,杨晓峥,张小虎,李柏松,高晞光. 调节型电液执行机构性能测试. 油气田地面工程. 2018(10): 90-95 . 百度学术
其他类型引用(1)








计量
- 文章访问数: 8
- HTML全文浏览量: 1
- PDF下载量: 25
- 被引次数: 14