 网站地图
网站地图



-
大视场红外成像技术具有成像范围广、成本低、可大规模部署的优势,成为军事侦察领域的研究热点之一[1]。大视场红外告警系统是探测空中来袭目标、获取目标方位信息并能及时发出告警信号的光电探测设备[2-3]。但大视场红外成像中存在图像畸变问题,且视场范围越大,图像畸变越严重,导致系统在目标方位提取时出现偏差,造成目标定位精度下降。
传统的大视场红外成像中目标方位识别主要利用相机内外参数进行图像畸变校正[4-6],再利用校正后的图像进行红外目标检测[7-8]与目标方位计算[9-10]。红外相机是依靠目标红外辐射成像,棋盘格图案无明显的温度界线,相机在标定过程中很容易引入误差,造成图像校正精度下降,最终影响系统的目标方位计算[11]。SHANG等人提出一种分区域标定模型对大视场激光告警系统中来袭激光方位信息进行拟合,实验结果显示,该模型角度误差在0.67°以内,拟合效果较差[12]。GUAN等人提出一种内外参一体化标定的稠密时角法,利用无人机模拟恒星星体,在相机视场内均匀布设控制点并解算标定参数,实验结果显示,该方法计算的角度误差在0.3°以内,系统定位精度较差[13]。
针对大视场红外告警系统中目标定位精度较差的问题,本文作者对大视场红外告警系统的工作原理及成像特点进行分析,设计并验证了一种基于主动标志物的多项式拟合模型,最终给出了一种目标高精度方位提取模型。系统采用1280×1024(焦平面阵列的规格大小)@12 μm(像元间距)非制冷型长波红外探测器,工作波段为8 μm~14 μm,相机焦距为16 mm,视场范围为45°×37°。
-
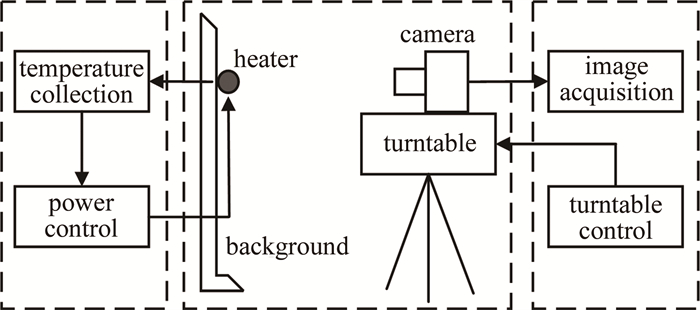
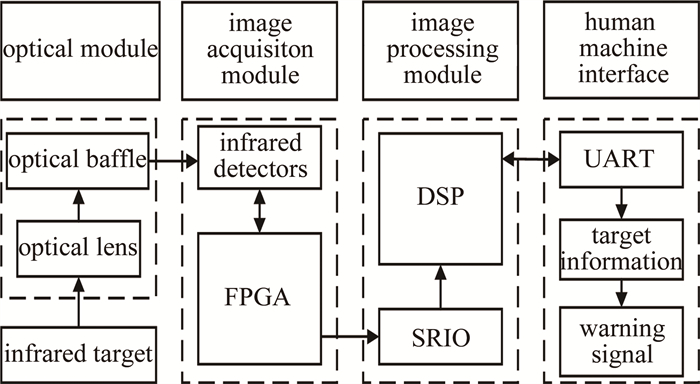
大视场红外告警系统主要由光学模块、图像采集、图像处理及人机界面四部分组成。系统结构如图 1所示,红外目标产生热辐射,热辐射经由光学镜头进行光路折射,最终入射到探测器表面。图像采集模块中可编程门阵列(field-programmable gate array,FPGA)负责驱动探测器并采集探测器输出图像,图像经高速串行输入输出口(serial rapid input output,SRIO)传入到数字信号处理器(digital signal processor,DSP)。DSP负责红外图像中弱小目标检测及目标方位计算[14-15],最终将来袭目标的方位信息通过异步通信接口(universal asynchronous receiver/transmitter,UART)传递至上位机,上位机接收到目标信息并及时发出告警信号。
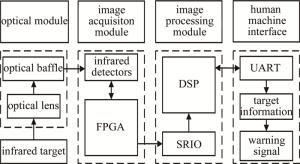
图 1 大视场红外告警系统结构图
Figure 1. Structure diagram of large field of view infrared warning system
大视场红外告警系统在光学镜头上引入负畸变效果,用来实现较大的成像视场 。实际应用中,目标理想成像点与实际成像点的对应关系可表示为:
$ \left\{ {\begin{array}{*{20}{l}} {{x_{\rm{c}}} = x\left( {1 + {k_1}{r^2} + {k_2}{r^4}} \right) + 2{l_2}xy + {l_1}\left( {{r^2} + 2{x^2}} \right)}\\ {{y_{\rm{c}}} = y\left( {1 + {k_1}{r^2} + {k_2}{r^4}} \right) + 2{l_1}xy + {l_2}\left( {{r^2} + 2{y^2}} \right)}\\ {{r^2} = {x^2} + {y^2}} \end{array}} \right. $
(1) 式中,(x,y)为目标校正前的坐标,(xc,yc)为校正后的坐标,k1和k2为径向畸变系数,l1和l2为切向畸变系数,r为目标到光学中心的距离。
将校正后的坐标代入角度计算公式,其结果如下式所示:
$ \left\{ {\begin{array}{*{20}{l}} {\alpha = \arctan \left( {{x_{\rm{c}}}/f} \right)}\\ {\beta = \arctan \left( {{y_{\rm{c}}}/f} \right)} \end{array}} \right. $
(2) 式中,f为相机焦距,(α,β)为目标方位信息。
利用泰勒公式对(2)式进行展开,得到结果如下式所示:
$ \left\{ {\begin{array}{*{20}{l}} {\alpha = \frac{{{x_{\rm{c}}}}}{f} - \frac{1}{3}{{\left( {\frac{{{x_{\rm{c}}}}}{f}} \right)}^3} + \frac{1}{5}{{\left( {\frac{{{x_{\rm{c}}}}}{f}} \right)}^5} - \cdots + }\\ \ \ \ \ \ \ {\frac{1}{{2n + 1}}{{\left( {\frac{{{x_{\rm{c}}}}}{f}} \right)}^{2n + 1}} + o{{\left( {\frac{{{x_{\rm{c}}}}}{f}} \right)}^{2n + 3}}}\\ {\beta = \frac{{{y_{\rm{c}}}}}{f} - \frac{1}{3}{{\left( {\frac{{{y_{\rm{c}}}}}{f}} \right)}^3} + \frac{1}{5}{{\left( {\frac{{{y_{\rm{c}}}}}{f}} \right)}^5} - \cdots + }\\ \ \ \ \ \ \ {\frac{1}{{2n + 1}}{{\left( {\frac{{{y_{\rm{c}}}}}{f}} \right)}^{2n + 1}} + o{{\left( {\frac{{{y_{\rm{c}}}}}{f}} \right)}^{2n + 3}}} \end{array}} \right. $
(3) 式中,n为泰勒多项式的阶数,o为泰勒多项式的无穷小量。
由上述展开式可知,目标方位计算可转化为高阶多项式计算,且多项式的计算结果与目标的2维坐标都有密切联系。本文中利用二元高阶多项式对大视场红外成像中目标方位信息进行拟合,其拟合多项式如下式所示:
$ \left\{ {\begin{array}{*{20}{l}} {{\alpha ^\prime } = \sum\limits_{i = 0}^m {\sum\limits_{j = 0}^i {{p_{ij}}} } {{(x + y)}^m}}\\ {{\beta ^\prime } = \sum\limits_{i = 0}^m {\sum\limits_{j = 0}^i {{q_{ij}}} } {{(x + y)}^m}} \end{array}} \right. $
(4) 式中,(α′,β′)为拟合后的目标方位信息,m为多项式拟合的阶数,i和j为多项式中x和y的幂数,(pij,qij)为多项式的拟合系数。
-
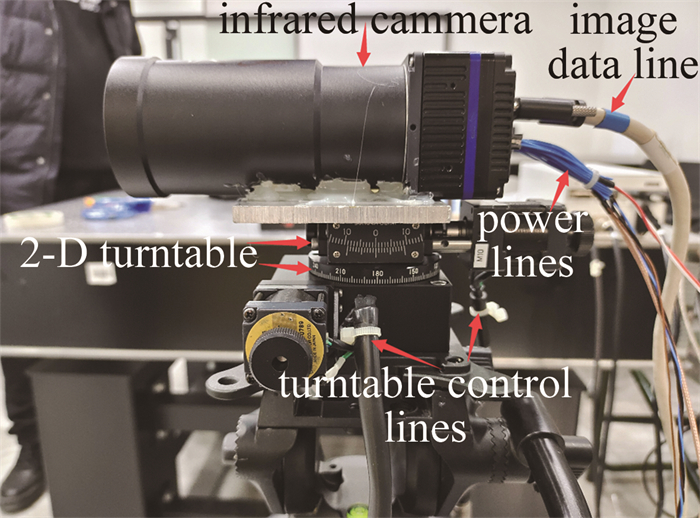
目标在距离相机较远位置成像时缺乏固定的形状和纹理特征,且所占像素较少,表现为点目标[18]。大视场红外告警系统在实际应用中,目标所占像素通常在几个到几十个之间。本文中选用高温陶瓷加热片模拟红外目标,并控制其成像大小约为30个像素。如图 2所示,将圆形陶瓷加热片固定在背景板上,采用高灵敏度的温度传感器采集加热片温度,并通过微型控制器(micro controllor unint,MCU)控制其温度稳定在60 ℃附近。将红外相机水平放置在2维转台上,调整加热片位置,使其成像在相机的光学中心上。利用上位机控制2维转台以4°为步进长度在水平和俯仰方向移动,记录相机在不同姿态角时对应的红外图像。红外相机与2维转台的实物图如图 3所示。
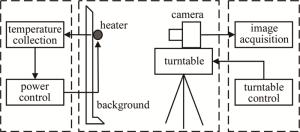
图 2 模拟实验结构图
Figure 2. Simulation experiment structure diagram
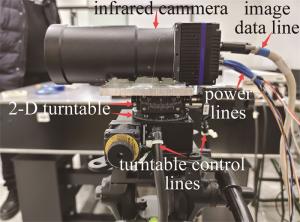
图 3 红外相机与2维转台实物图
Figure 3. Physical image of infrared camera and 2-D turntable
采用阈值分割法[19]对上述实验中获取的图像进行二值化处理。如图 4所示,本文中列出了目标在部分方位角时对应的二值化图像,图中黑色区域为背景图像,白色区域为红外目标。采用质心法[20]计算二值化图像中目标在图像坐标系下的中心坐标,最终获得大视场红外成像中目标方位信息与目标中心坐标的对应数据点集。
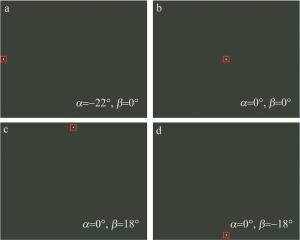
图 4 二值化图像
Figure 4. Binarize image
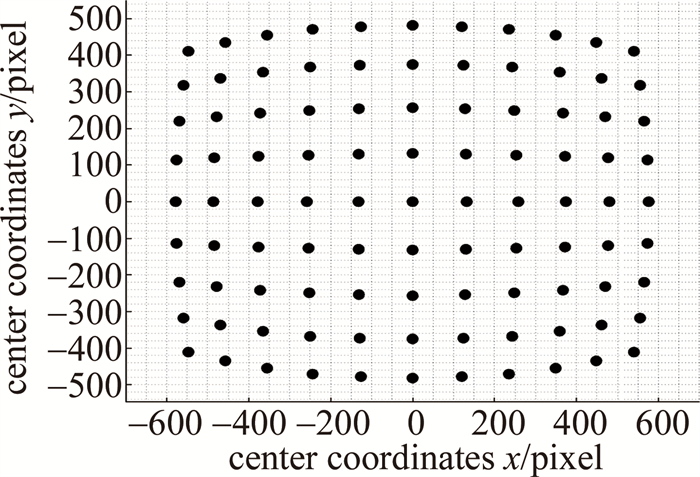
将实验中获取的数据点集导入到平面坐标系中。如图 5所示,大视场红外成像中目标采样点集呈桶状分布,且越靠近视场边缘部分,目标分布越密集;在水平方向上,随着目标偏转角逐渐增大,目标在同一偏转角的成像轨迹逐渐由直线变为弧线,且该弧线关于轴对称;在竖直方向上,随着目标俯仰角逐渐增大,目标在同一俯仰角的成像轨迹逐渐由直线变为弧线,且该弧线关于轴对称。
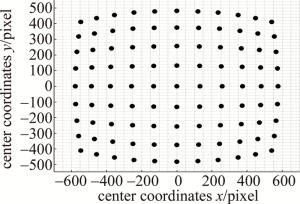
图 5 采样数据点集
Figure 5. Sampling data point set
由上述实验现象可知,大视场红外成像中,目标偏转角不仅与水平方向坐标有关,还与竖直方向坐标有关;目标俯仰角不仅与竖直方向坐标有关,也与水平方向坐标有关。本文中采用二元高阶多项式对大视场红外成像中目标方位信息进行拟合,拟合结果显示,当多项式次幂为奇数时,随着多项式次幂的逐渐提升,多项式拟合的角度误差也在逐渐减小。当多项式次幂等于5时,系统偏转角的均方根误差为0.045°,俯仰角的均方根误差为0.056°,此时,多项式拟合结果如下所示:
$ \begin{array}{l} \alpha ' = - 0.024 + 0.031x + 9.614 \times {10^{ - 18}}y + \\ \;\;\;\;\;\;1.094 \times {10^{ - 6}}{x^2} - 4.361 \times {10^{ - 21}}xy + \\ \;\;\;\;\;\;6.146 \times {10^{ - 7}}{y^2} + 7.486 \times {10^{ - 9}}{x^3} - \\ \;\;\;\;\;\;5.835 \times {10^{ - 23}}{x^2}y + 6.521 \times {10^{ - 9}}x{y^2} - \\ \;\;\;\;\;\;9.217 \times {10^{ - 23}}{y^3} - 2.507 \times {10^{ - 12}}{x^4} - \\ \;\;\;\;\;\;8.821 \times {10^{ - 28}}{x^3}y + 5.001 \times {10^{ - 14}}{x^2}{y^2} + \\ \;\;\;\;\;\;1.645 \times {10^{ - 26}}x{y^3} - 9.989 \times {10^{ - 13}}{y^4} + \\ \;\;\;\;\;\;{\rm{1}}.398 \times {10^{ - 14}}{x^5} + 4.486 \times {10^{ - 29}}{x^4}y + \\ \;\;\;\;\;\;2.86 \times {10^{ - 14}}{x^3}{y^2} + 2.824 \times {10^{ - 28}}{x^2}{y^3} + \\ \;\;\;\;\;\;{\rm{7}}.133 \times {10^{ - 15}}x{y^4} + 2.101 \times {10^{ - 28}}{y^5} \end{array} $
(5) $ \begin{array}{l} \beta ' = - 9.692 \times {10^{ - 16}} + 3.182 \times {10^{ - 19}}x + \\ \;\;\;\;\;\;0.031y + 1.243 \times {10^{ - 20}}{x^2} - 3.49 \times {10^{ - 9}}xy - \\ \;\;\;\;\;\;6.655 \times {10^{ - 21}}{y^2} + 2.123 \times {10^{ - 24}}{x^3} + \\ \;\;\;\;\;\;5.56 \times {10^{ - 9}}{x^2}y - 1.158 \times {10^{ - 23}}x{y^2} + \\ \;\;\;\;\;\;8.665 \times {10^{ - 9}}{y^3} - 2.579 \times {10^{ - 26}}{x^4} + \\ \;\;\;\;\;\;2.991 \times {10^{ - 13}}{x^3}y + 7.501 \times {10^{ - 27}}{x^2}{y^2} + \\ \;\;\;\;\;\;{\rm{7}}.293 \times {10^{ - 13}}x{y^3} + 4.003 \times {10^{ - 26}}{y^4} - \\ \;\;\;\;\;\;1.008 \times {10^{ - 29}}{x^5} + 2.795 \times {10^{ - 14}}{x^4}y + \\ \;\;\;\;\;\;2.322 \times {10^{ - 29}}{x^3}{y^2} + 4.962 \times {10^{ - 14}}{x^2}{y^3} + \\ \;\;\;\;\;\;2.506 \times {10^{ - 29}}x{y^4} + 8.899 \times {10^{ - 15}}{y^5} \end{array} $
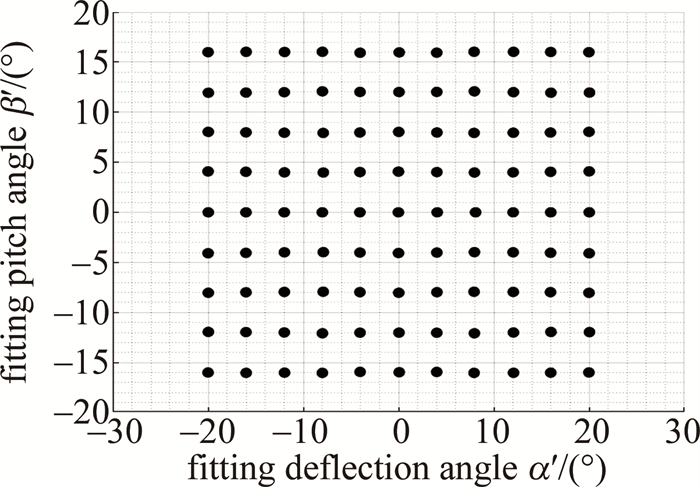
(6) 为了观察多项式拟合的效果,将通过(5)式、(6)式拟合后的目标方位信息导入到平面坐标系中。如图 6所示,拟合后的数据点集在平面坐标系中均匀分布,且目标在同一偏转角或同一俯仰角的成像轨迹为均匀的直线。通过对比数据拟合前和拟合后的分布情况,可知该模型方位拟合效果较好。
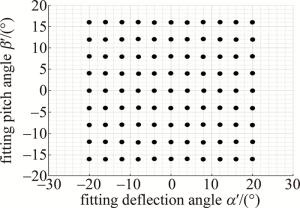
图 6 拟合数据点集
Figure 6. Fitted data point set
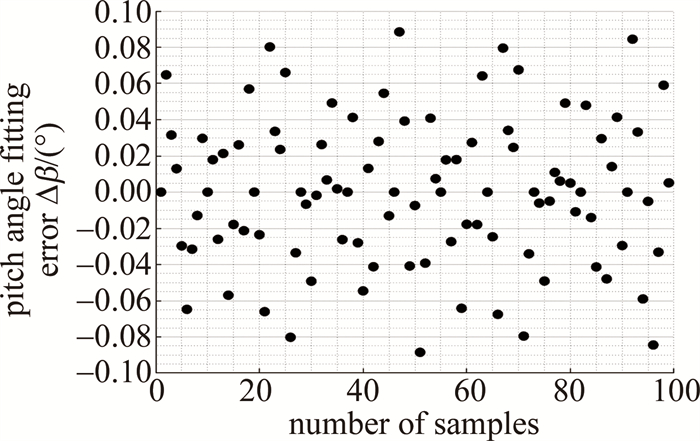
为了进一步验证多项式拟合法的目标定位精度,将目标实际方位与多项式拟合结果进行对比,得到该方法的拟合误差,如图 7、图 8所示。从图中可以看出,该方法拟合误差优于0.1°,可以在很大程度上提升系统的目标定位精度。
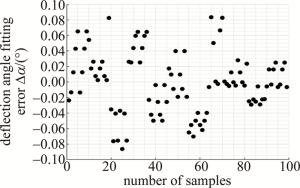
图 7 偏转角拟合误差
Figure 7. Deflection angle fitting error
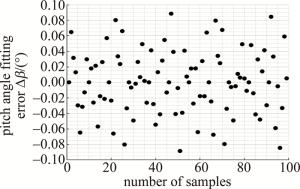
图 8 俯仰角拟合误差
Figure 8. Pitch angle fitting error
随机采样6组数据,得到目标实际方位与多项式拟合结果,如表 1所示。
表 1 数据计算结果
Table 1. Data calculation results
orientation information/(°) center coordinates calculation results/(°) angle error/(°) α β x y α′ β′ Δα Δβ 2.00 8.00 66.3 254.2 2.07 7.95 -0.07 0.05 8.00 2.00 254.4 62.5 7.96 1.93 0.04 0.07 20.00 0.00 576.2 -1.1 20.02 -0.04 -0.02 0.04 -18.00 -10.00 -520.3 -279.6 -17.97 -10.05 -0.03 0.05 -22.00 -8.00 -611.7 -211.3 -22.06 -7.93 0.06 -0.07 -22.00 -16.00 -588.4 -398.2 -22.01 -15.95 0.01 -0.05 -
本文中介绍了大视场红外告警系统的工作原理及成像特点,通过理论推导及实验现象得出大视场红外成像中目标偏转角、俯仰角与目标在图像坐标系中2维坐标都具有紧密的联系。提出并验证了一种基于二元高阶多项式的目标方位拟合模型,实验结果表明,该模型的拟合角度误差在±0.1°以内,在很大程度上提高了大视场红外告警系统中目标定位精度。该结果为大视场或鱼眼成像中目标方位识别提供了一种新的方法,适用于光电对抗、航空航天等军事侦察领域。
大视场红外告警系统中目标高精度方位提取
High precision azimuth extraction of target in large field of view infrared warning system
-
摘要: 为了解决大视场红外告警系统中目标定位精度较差的问题,采用一种基于主动标志物的多项式拟合法,对大视场红外告警系统中目标方位提取进行了理论研究和实验验证。利用高温陶瓷加热片模拟红外目标,通过高精度2维转台获得相机姿态角与目标中心坐标的对应数据点集,采用二元高阶多项式对目标方位信息进行拟合,实现了大视场红外告警系统中目标高精度方位提取。结果表明,该拟合方法的角度误差在±0.1°以内,目标定位精度较高。这一结果有助于大视场红外成像中目标方位的提取。Abstract: In order to solve the problem of poor target location accuracy in wide-field infrared alarm system, a polynomial fitting method based on active markers was used to extract target location in wide-field infrared alarm system. A high-temperature ceramic heating plate was used to simulate an infrared target, and a high-precision 2-D turntable was used to obtain the corresponding data point set of the camera's attitude angle and the target center coordinates, and a binary high-order polynomial was used to fit the target orientation information. The high-precision azimuth extraction of the target in the large-field infrared warning system was realized. The experimental results show that the angle error of the fitting method is within ±0.1°, and the target positioning accuracy is high. This result is helpful for target azimuth extraction in large-field infrared imaging.
-
图 1 大视场红外告警系统结构图
Figure 1. Structure diagram of large field of view infrared warning system
表 1 数据计算结果
Table 1. Data calculation results
orientation information/(°) center coordinates calculation results/(°) angle error/(°) α β x y α′ β′ Δα Δβ 2.00 8.00 66.3 254.2 2.07 7.95 -0.07 0.05 8.00 2.00 254.4 62.5 7.96 1.93 0.04 0.07 20.00 0.00 576.2 -1.1 20.02 -0.04 -0.02 0.04 -18.00 -10.00 -520.3 -279.6 -17.97 -10.05 -0.03 0.05 -22.00 -8.00 -611.7 -211.3 -22.06 -7.93 0.06 -0.07 -22.00 -16.00 -588.4 -398.2 -22.01 -15.95 0.01 -0.05  下载: 导出CSV
下载: 导出CSV
-
[1] 张帅, 刘秉琦, 黄富瑜, 等. 超大视场红外凝视成像技术及其应用浅析[J]. 激光与红外, 2016, 46(10): 1176-1182. doi: 10.3969/j.issn.1001-5078.2016.10.002 ZHANG Sh, LIU B Q, HANG F Y, et al. Super wide field of view staring infrared imaging technology and its application[J]. Laser & Infrared, 2016, 46(10): 1176-1182(in Chinese). doi: 10.3969/j.issn.1001-5078.2016.10.002 [2] 任宁, 姜丽新. 光电告警技术与国外典型装备发展分析[J]. 光电技术应用, 2020, 35(3): 12-16. doi: 10.3969/j.issn.1673-1255.2020.03.003 REN N, JIANG L X. Development analysis of electro-optical warning technology and foreign typical equipments[J]. Electro-Optic Techno-logy Application, 2020, 35(3): 12-16(in Chinese). doi: 10.3969/j.issn.1673-1255.2020.03.003 [3] 朱怀毅. 基于红外的空中目标告警跟踪系统研究[D]. 长沙: 长沙理工大学, 2017: 14-65. ZHU H Y. Research on airborne target warning tracking system based on infrared[D]. Changsha: Changsha University of Science & Technology, 2017: 14-65(in Chinese). [4] 石岩青, 常彩霞, 刘小红, 等. 面阵相机内外参数标定方法及进展[J]. 激光与光电子学进展, 2021, 58(24): 2400001. SHI Y Q, CHANG C X, LIU X H, et al. Calibration methods and progress for internal and external parameters of area-array camera[J]. Laser and Optoelectronics Progress, 2021, 58(24): 2400001(in Chinese). [5] LIU Zh, LI F J, LI X J, et al. A novel and accurate calibration method for cameras with large field of view using combined small targets[J]. Measurement, 2015, 64: 1-16. doi: 10.1016/j.measurement.2014.11.027 [6] 王子昂, 刘秉琦, 黄富瑜. 基于主动红外辐射标定板的超广角红外相机标定[J]. 半导体光电, 2019, 40(5): 700-703. WANG Z A, LIU B Q, HUANG F Y. Ultra-wide angle infrared camera calibration based on active infrared radiation calibration checkerboard[J]. Semiconductor Optoelectronics, 2019, 40(5): 700-703(in Chinese). [7] 陈勤霞, 武文成, 艾斯卡尔·艾木都拉. 一种基于多尺度点状目标建模的检测算法[J]. 激光技术, 2020, 44(4): 520-524. CHEN Q X, WU W Ch, ASKAR H. Detection algorithm based on multi-scale spotted target modeling[J]. Laser Technology, 2020, 44(4): 520-524(in Chinese). [8] 朱金辉, 张宝华, 谷宇, 等. 基于双邻域对比度的红外小目标检测算法[J]. 激光技术, 2021, 45(6): 794-798. ZHU J H, ZHANG B H, GU Y, et al. Infrared small target detection algorithm based on double neighborhood contrast measure[J]. Laser Technology, 2021, 45(6): 794-798(in Chinese). [9] 吴琼, 张瑞, 石金, 等. 高精度二维宽波段激光告警参数计算算法[J]. 应用光学, 2022, 43(1): 111-118. WU Q, ZHANG R, SHI J, et al. Calculation algorithm of high-precision two-dimensional broadband laser warning parameters[J]. Journal of Applied Optics, 2022, 43(1): 111-118(in Chinese). [10] 杨承, 曾钦勇, 朱大勇, 等. 日盲型紫外探测系统中目标定位的研究[J]. 激光技术, 2008, 32(2): 140-142. YANG Ch, ZENG Q Y, ZHU D Y, et al. Study on the target location in solar blind ultraviolet detecting system[J]. Laser Technology, 2008, 32(2): 140-142(in Chinese). [11] 王谭, 王磊磊, 张卫国, 等. 基于张正友标定法的红外靶标系统[J]. 光学精密工程, 2019, 27(8): 1828-1835. WANG T, WANG L L, ZHANG W G, et al. Design of infrared target system with Zhang Zhengyou calibration method[J]. Optics and Precision Engineering, 2019, 27(8): 1828-1835(in Chinese). [12] 尚琰, 张瑞, 林聪, 等. 光栅衍射型宽波段大视场激光告警图像处理[J]. 激光杂志, 2021, 42(11): 92-96. SHANG Y, ZHANG R, LIN C, et al. Image processing of grating diffraction wide-band and large-field lase warning[J]. Laser Journal, 2021, 42(11): 92-96(in Chinese). [13] 官斌, 蔡龙飞. 基于稠密时角法的天空背景相机标定技术研究[J]. 光学与光电技术, 2021, 19(5): 55-60. GUAN B, CAI L F. Denseness star-arc calibration for sky-background survey camera[J]. Optics & Optoelectronic Technology, 2021, 19(5): 55-60(in Chinese). [14] 孙秀峰. 基于国产多核DSP的红外弱小目标检测算法[J]. 数字技术与应用, 2020, 38(10): 80-82. SUN X F. Infrared dim targets detection basedonthe nationalization of multi-core DSP[J]. Digital Technology and Application, 2020, 38(10): 80-82 (in Chinese). [15] 朱发强. 基于多核DSP的红外告警信息处理系统设计[D]. 西安: 西安电子科技大学, 2018: 32-93(in Chinese). ZHU F Q. Infrared warning Information processing system design based on multicore DSP[D]. Xi'an: Xidian University, 2018: 32-93(in Chinese). [16] 陈建发, 潘枝峰, 王合龙. 超大视场红外光学镜头设计[J]. 红外与激光工程, 2020, 49(6): 282-287. CHEN J F, PAN Zh F, WANG H L. Design of infrared optical lens with large field of view[J]. Infrared and Laser Engineering, 2020, 49(6): 282-287 (in Chinese). [17] 刘帅, 牛燕雄, 刘海月. 全向凝视光电成像系统鱼眼透镜的设计[J]. 激光技术, 2017, 41(2): 296-301. LIU Sh, NIU Y X, LIU H Y. Design of fisheye lens of omnidirectional gaze photoelectric imaging systems[J]. Laser Technology, 2017, 41(2): 296-301(in Chinese). [18] 周玉龙. 超大视场红外告警系统的成像特点分析[J]. 应用光学, 2010, 31(6): 871-875. ZHOU Y L. Image analysis of ultra-wide field of view infrared warning system[J]. Journal of Applied Optics, 2010, 31(6): 871-875(in Chinese). [19] 王好贤, 董衡, 周志权. 红外单帧图像弱小目标检测技术综述[J]. 激光与光电子学进展, 2019, 56(8): 080001. WANG H X, DONG H, ZHOU Zh Q. Review on dim small target detection technologies in infrared single frame images[J]. Laser & Optoelectronics Progress, 2019, 56(8): 080001(in Chinese). [20] XU W X, QIAO W D, YANG J F, et al. Study about distortion measurement of NFOV lens based on star point method[J]. Laser Technology, 2011, 35(5): 593-595(in Chinese). -

 点击查看大图
点击查看大图
图(8) / 表(1)
计量
- 文章访问数: 2547
- HTML全文浏览量: 1526
- PDF下载量: 23
- 被引次数: 0
