 网站地图
网站地图

 下载:
下载:

-
微型无人机(micro-unmanned aerial vehicle,MUAV)具有灵活、高效、隐蔽及高安全性等特点,在军用[1-3]和民用[4-6]领域发挥着越来越重要的作用。而现阶段MUAV的广泛应用对其动力方面的要求显著提升,提高MUAV的续航时间已经成为研究人员广泛关注的重要问题。基于激光能量集中、方向性好以及特制激光电池允许照射光强大、光电转换效率高的特点,以激光束作为无线能量传输载体对MUAV进行实时充电,是提高MUAV续航时间的一条有效途径[7-13]。但这种实时充电方式需对飞行过程中的MUAV进行精准、快速的跟踪,才能保证激光束始终对准激光电池片,以实现MUAV的高效充电[14]。
从国内外学者已经开展的激光对移动目标跟踪瞄准的相关研究报道看,激光对移动目标跟瞄方式主要分为两类:(1)采用四象限光电探测器、光电二极管等光电传感器对激光信号进行探测,该类方式可以将光电传感器直接放置在移动目标上,其感知的目标位置信息通过无线传输方法传送到激光发射端,用以控制激光束的发射方位[15],也可以将光电传感器放置在激光发射端,而在移动目标上放置角锥反射镜,利用角锥镜等光学器件反射回光电传感器上的激光信号来控制激光束的发射方位[16-17]; (2)采用电荷耦合器件(charge-coupled device, CCD)、互补金属氧化物半导体(complementary metal oxide semiconductor, CMOS)等图像传感器对移动目标或激光光斑位置进行检测,从而实现激光对MUAV的实时充电[18-19]。这两类跟踪瞄准方式各有特点:第1类方式由于光电传感器硬件响应时间的限制,跟踪速度受到制约,但跟踪精度较高,该方式比较适用于线度小、移动速度低的目标跟踪瞄准;第2类方式由于图像处理速度快,因此跟踪速度较高,但由于图像清晰度的影响,跟踪精度会受到限制,该方式比较适用于线度大、移动速度高的目标跟踪瞄准。
为了提高旋翼式MUAV的续航时间和工作性能,本文中设计并搭建了一套基于振镜的激光远程充电系统。该系统采用扫描振镜、硅光电池阵列和无线数传模块构建闭环反馈控制系统,通过合理布置硅光电池阵列,使之同时兼顾激光束对空中移动MUAV的扫描跟踪和充电功能,且接收端结构较为简单、轻巧,可有效提高MUAV的续航时间。
-
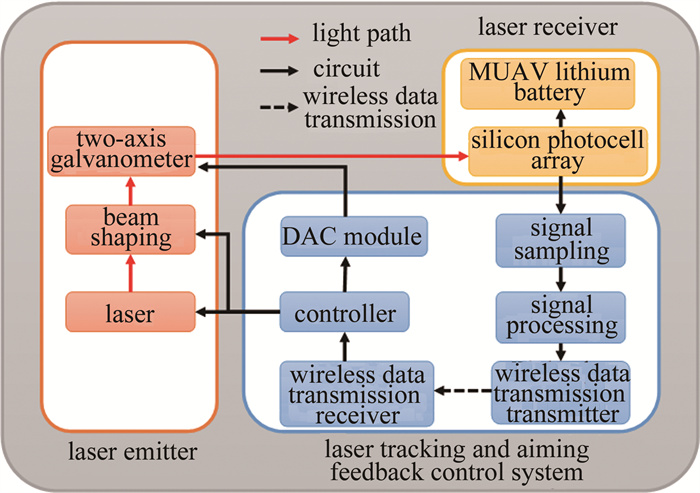
要实现激光对飞行中MUAV的实时充电,首先要实现激光束对MUAV的扫描与捕获,之后需要激光束对MUAV实时地跟踪与瞄准。因此,在置于地面上的激光发射端与加载到MUAV上的激光接收端间建立了一套闭环反馈控制系统。该系统的结构框图如图 1所示。
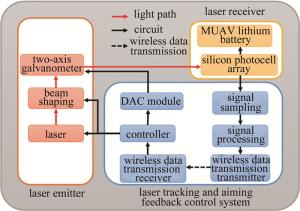
Figure 1. Structrue block diagram of laser aiming charging system for MUAV
激光发射端由光纤输出的高功率半导体激光器、光束整形光学器件和二轴扫描振镜组成,光束整形光学器件对光纤输出的激光束进行匀化和调焦,以实现激光束发散角大小可调;激光束先后照射到可绕两垂直x-y轴转动的全反射振镜上,通过控制振镜转动,可使激光束在一定的区域内移动,实现激光对移动目标的瞄准。激光接收端由硅光电池阵列与MUAV上的锂电池组成,硅光电池阵列将照射到其上激光能量转换成电能,通过升压整流电路为MUAV上的锂电池进行充电。
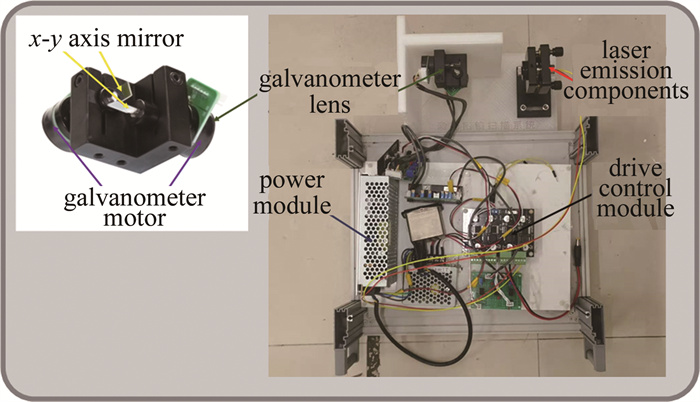
同时,硅光电池阵列在激光照射前后负载电压信号发生变化,由单片机芯片处理后进行模/数信号采样识别,采用跟踪算法对信号进行处理,获取激光斑与硅光电池阵列的相对位置信息,将此位置信息进行编码处理后,由无线数传模块传输到地面控制系统。在地面控制端,控制器将反馈的信息进行解码,再通过相应控制算法进行处理,输出对二轴振镜的数字电压控制信号,并通过数字模拟转换器(digital-to-analog converter, DAC)模块转换为模拟电压控制信号,用来调整二轴振镜姿态,使激光束偏转相应角度,实现激光对MUAV的实时跟踪瞄准。若MUAV端无电压信号反馈,则表示激光束未照射到硅光电池阵列,此时控制系统则会控制振镜在充电区域内按照扫描算法快速扫描,直至激光束捕获到硅光电池阵列; 若有激光照射的位置信息反馈,闭环控制系统便进入正常的跟踪瞄准工作模式。位于地面上的激光扫描振镜及其控制系统如图 2所示。
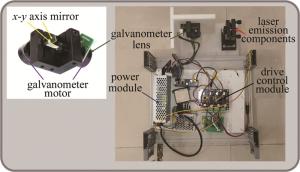
Figure 2. Prototype of laser scanning galvanometer and its control system
在本系统中,调节振镜转角的输入信号为MUAV上硅光电池阵列与激光束的相对位置经扫描跟踪算法处理后所得控制信号。振镜上两反射镜片尺寸为7mm×11mm×0.6mm,镜片光学反射率大于98%。控制器提供的电压信号通过驱动放大电路和DAC模块,驱动电机和与电机固连的镜片转动,进而控制激光束发射方向。振镜的扫描速率为20×103 packet/s,模拟电压信号在-10V~+10V变化,对应每个反射镜片-20°~+20°的角度变化,且角度变化与电压信号变化成线性关系。振镜电机的小角度步进响应时间为0.15ms,可识别0.001V的电压波动,因此具有很高的跟踪灵敏度和跟踪精度。
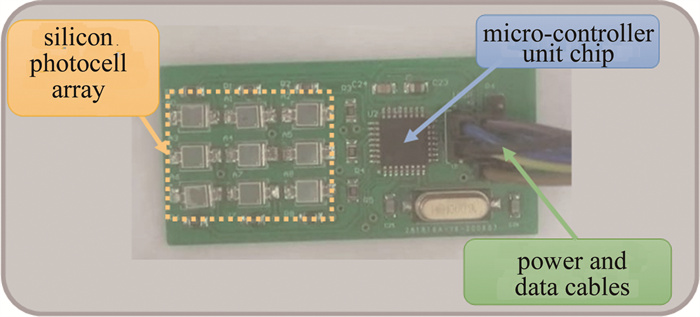
MUAV端硅光电池阵列设计如图 3所示。由9个硅光电池以3×3矩阵排列,当有激光照射到硅光电池光敏面上时,硅光电池的负载两端产生负载电压,且在负载电阻不变时,照射的激光强度越大,光电流越大,负载电压也越大。通过单片机芯片分别读取各子电池的负载电压信号,采用跟踪算法处理即可得到激光斑在硅光电池阵列上的相对位置信息,再对该信息进行传输和处理,就可实现激光束对硅光电池阵列的跟踪。在整个激光充电模块中,硅光电池阵列有两个作用: 一是作为光电信息位置传感器,得到激光斑与光电池阵列的相对位置信息;二是作为电能获取装置,将激光能量转换为电能,为MUAV上的锂电池实时充电。即同时实现激光定位跟踪与实时充电两种功能。
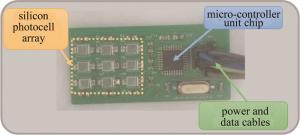
Figure 3. Prototype of laser charging module at MUAV
为了实现激光对运动MUAV的跟瞄,作者采用Nordic公司的NRF52840芯片作为信号传输与反馈的无线数传模块,该模块具有功耗低、体积小、传输距离远、抗干扰能力强等优点, 其样机如图 4所示。NRF52840通过SPI接口与单片机芯片连接,进行协议设置和数据传输,同时通过串行外设接口(serial peripheral interface, SPI)接口接收单片机芯片的控制指令,进行无线数据的接收和发送。RF52840的工作电压为1.7V~5.5V,工作频率为2402MHz~2480MHz,发射功率为-20dBm~+8dBm,同时内部自带32.768kHz晶振,功耗很低,工作时电流消耗仅为1.34μA,最大传输距离可到达550m,可适应-40℃~85℃的恶劣工作环境。

Figure 4. Wireless data transmission module based on NRF52840
-
采用上述系统装置完成激光对空中移动MUAV的实时充电,需分两步实现。第1步是激光束对MUAV的扫描与捕获;第2步则是激光束对MUAV的跟踪瞄准。
-
首先,在选定单片机芯片作为控制扫描振镜的主处理器后,为使系统整体工作模式简洁高效,采用2维图形扫描作为主要扫描方式。
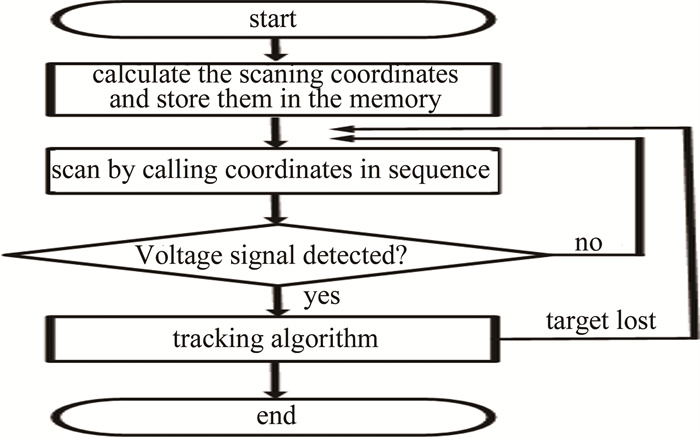
位于地面控制端的DAC模块可通过SPI接口读取16位二进制数字电压信号,为此,首先将MUAV飞行空域的2维平面离散为65535×65535个像素点,其次将扫描算法所用的2维扫描图形进行离散化处理,计算得出图形中各离散点的2维坐标,再将其转化为数组存入到单片机的数据存储器中。在单片机运行扫描算法时,就可直接按照扫描顺序调用数组中的坐标值,通过算法处理后,直接由单片机芯片的输入/输出(in/out, I/O)端口输出相应的数字电压信号,DAC模块再将其转换为模拟电压信号,驱动振镜转动相应角度,从而控制激光束发射方向,完成激光束对MUAV工作空域的扫描工作。图 5为系统扫描程序原理框图。本文中选用螺线扫描方式对MUAV飞行空域进行扫描,示意图如图 6所示。
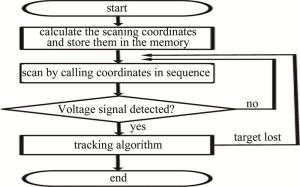
Figure 5. Schematic diagram of system scanning program
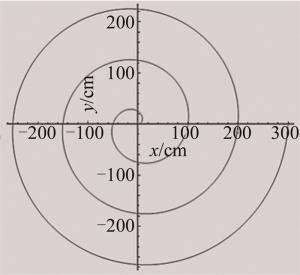
Figure 6. Schematic diagram of spiral scanning
扫描起始坐标为(32767,32767),扫描参数方程为:
$ \left\{ {\begin{array}{*{20}{c}} {\mathit{x}{\rm{ = }}\mathit{vt}{\rm{cos[(}}\mathit{\omega }{\rm{ - }}\mathit{at}{\rm{)}}\mathit{t}{\rm{] + 32767}}}\\ {\mathit{y}{\rm{ = }}\mathit{vt}{\rm{sin[}}\left( {\mathit{\omega }{\rm{ - }}\mathit{at}} \right)\mathit{t}{\rm{] + 32767}}} \end{array}} \right. $
(1) 式中, v为扫描线速度, ω为扫描角速度, a为常数,t为时间。在中心点附近区域扫描角速度较大,这样可降低扫描密度,有效提高扫描速度;而在扫描区域边缘附近时扫描角速度较小,但分辨率和精度较高。该扫描方式有利于提高系统的扫描效率,可使激光束在较短的时间内捕获到硅光电池阵列。
-
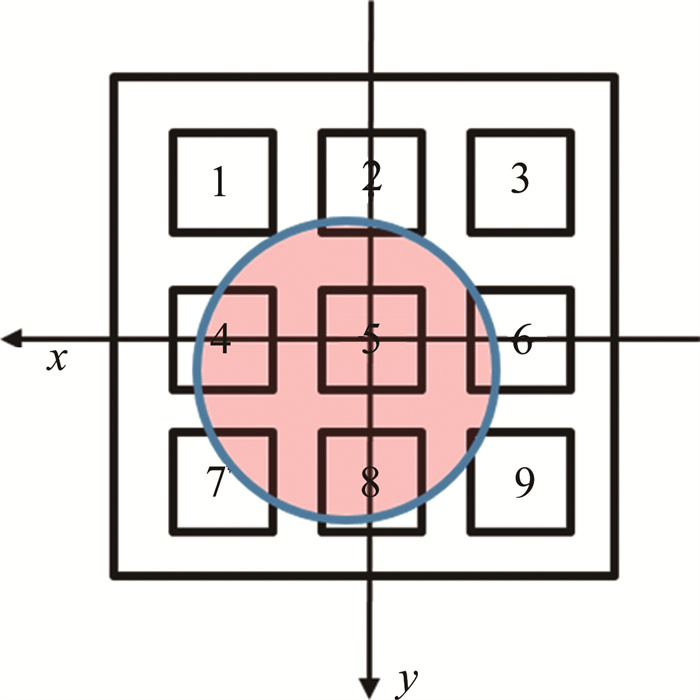
在激光束对硅光电池阵列的跟瞄过程中,采用和差算法通过对阵列中各硅光电池输出的电信号进行处理实现跟瞄。系统照射到硅光电池阵列上的激光束近似为圆形光斑,且能量分布均匀。首先对阵列内的子电池进行编号,如图 7所示,然后以位于中心的5号子电池为坐标原点,建立2维坐标系,在坐标系中对其余子电池进行坐标定位。
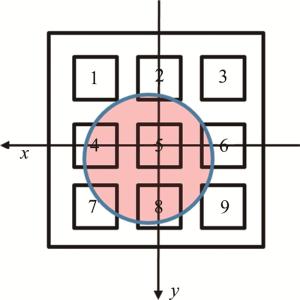
Figure 7. Schematic diagram of silicon photocell
和差算法根据激光斑发生位置偏移后各子电池负载电压信号的不同进行定位,在MUAV飞行过程中,激光斑中心相对硅光电池阵列中心有偏离时,各子电池会由于光斑信号的变化产生不同光电流I1,I2,…, I9,进而产生不同电压信号U1,U2,…, U9,且每个电压信号的大小与照射到各子电池光敏面上的激光斑面积大小成正比。采用和差算法对该系列电压信号进行处理,即可得到光斑与光电池阵列的相对位置信息。通过定量计算可得,激光斑中心在硅光电池阵列坐标系中的位置为:
$ \begin{array}{c} \mathit{x}{\rm{ = }}\mathit{\lambda }\frac{{\left( {{\mathit{I}_{\rm{1}}}{\rm{ + }}{\mathit{I}_{\rm{4}}}{\rm{ + }}{\mathit{I}_{\rm{7}}}} \right) - \left( {{\mathit{I}_{\rm{3}}}{\rm{ + }}{\mathit{I}_{\rm{6}}}{\rm{ + }}{\mathit{I}_{\rm{9}}}} \right)}}{{{\mathit{I}_{\rm{1}}}{\rm{ + }}{\mathit{I}_{\rm{2}}}{\rm{ + }}{\mathit{I}_{\rm{3}}}{\rm{ + \ldots + }}{\mathit{I}_{\rm{9}}}}}{\rm{ = }}\\ \mathit{\lambda }\frac{{\left( {{\mathit{U}_{\rm{1}}}{\rm{ + }}{\mathit{U}_{\rm{4}}}{\rm{ + }}{\mathit{U}_{\rm{7}}}} \right) - \left( {{\mathit{U}_{\rm{3}}}{\rm{ + }}{\mathit{U}_{\rm{6}}}{\rm{ + }}{\mathit{U}_{\rm{9}}}} \right)}}{{{\mathit{U}_{\rm{1}}}{\rm{ + }}{\mathit{U}_{\rm{2}}}{\rm{ + }}{\mathit{U}_{\rm{3}}}{\rm{ + \ldots + }}{\mathit{U}_{\rm{9}}}}} \end{array} $
(2) $ \begin{array}{l} {\rm{y = }}\mathit{\lambda }\frac{{\left( {{\mathit{I}_{\rm{7}}}{\rm{ + }}{\mathit{I}_{\rm{8}}}{\rm{ + }}{\mathit{I}_{\rm{9}}}} \right) - \left( {{\mathit{I}_{\rm{1}}}{\rm{ + }}{\mathit{I}_{\rm{2}}}{\rm{ + }}{\mathit{I}_{\rm{3}}}} \right)}}{{{\mathit{I}_{\rm{1}}}{\rm{ + }}{\mathit{I}_{\rm{2}}}{\rm{ + }}{\mathit{I}_{\rm{3}}}{\rm{ + \ldots + }}{\mathit{I}_{\rm{9}}}}}{\rm{ = }}\\ \mathit{\lambda }\frac{{\left( {{\mathit{U}_{\rm{7}}}{\rm{ + }}{\mathit{U}_{\rm{8}}}{\rm{ + }}{\mathit{U}_{\rm{9}}}} \right) - \left( {{\mathit{U}_{\rm{1}}}{\rm{ + }}{\mathit{U}_{\rm{2}}}{\rm{ + }}{\mathit{U}_{\rm{3}}}} \right)}}{{{\mathit{U}_{\rm{1}}}{\rm{ + }}{\mathit{U}_{\rm{2}}}{\rm{ + }}{\mathit{U}_{\rm{3}}}{\rm{ + \ldots + }}{\mathit{U}_{\rm{9}}}}} \end{array} $
(3) 式中, λ为常数,由此和差算法对激光束的位置信息判断简单迅速。需要说明的是,在单片机芯片对硅光电池阵列上输出电压的两次采样之间,若光斑偏移距离较大,则该算法得出的激光斑位置信息误差较大,因此该算法对单片机芯片的采样频率要求较高。
同时,还采用卡尔曼滤波算法对激光斑中心下一时刻的位置进行预测与修正,以减小跟踪延迟,提高跟踪速度及精度。设常态情况下MUAV匀速运动,但由于空气中气流干扰或飞行控制系统误差,也会出现非匀速飞行的状态。卡尔曼滤波算法可将激光光斑中心在硅光电池阵列上的相对位置作为观测数据,对其进行滤波处理,将干扰项随机加速度u2×1(k-1)(k表示采样次数)作为输入向量,硅光电池输出电压信号的误差作为观测噪声v2×1(k), 下标2×1表示2行1列的矩阵。将x、y轴方向的坐标和速率作为状态向量:
$ \mathit{\boldsymbol{X}}\left( \mathit{k} \right){\rm{ = [}}\mathit{x}\left( \mathit{k}\right)\qquad \mathit{\dot x}\left( \mathit{k}\right)\qquad \mathit{y}\left( \mathit{k}\right)\qquad \mathit{\dot y}\left( \mathit{k} \right){{\rm{]}}^{\rm{T}}} $
(4) 式中,x, y表示位置坐标,ẋ,ẏ表示该方向上的速率。跟瞄系统的状态方程和观测方程分别为:
$ \begin{array}{c} \mathit{\boldsymbol{X}}\left( \mathit{k} \right) = \left[ {\begin{array}{*{20}{c}} {\mathit{x}\left( \mathit{k} \right)}\\ {\mathit{\dot x}\left( \mathit{k} \right)}\\ {\mathit{y}\left( \mathit{k} \right)}\\ {\mathit{\dot y}\left( \mathit{k} \right)} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} 1&\mathit{T}&0&0\\ 0&1&0&0\\ 0&0&1&\mathit{T}\\ 0&0&0&1 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\mathit{x}\left( {\mathit{k - 1}} \right)}\\ {\mathit{\dot x}\left( {\mathit{k - 1}} \right)}\\ {\mathit{y}\left( {\mathit{k - 1}} \right)}\\ {\mathit{\dot y}\left( {\mathit{k - 1}} \right)} \end{array}} \right] + \\ \left[ {\begin{array}{*{20}{c}} {{\rm{0}}{\rm{.5}}{\mathit{T}^{\rm{2}}}}\\ \mathit{T}\\ 0\\ 0 \end{array}} \right.\left. {\begin{array}{*{20}{c}} 0\\ 0\\ {{\rm{5}}{\mathit{T}^{\rm{2}}}}\\ \mathit{T} \end{array}} \right]{\mathit{\boldsymbol{u}}_{{\rm{2 \times 1}}}}\left( {\mathit{k - }{\rm{1}}} \right) \end{array} $
(5) $ \mathit{\boldsymbol{Z}}\left( \mathit{k} \right){\rm{ = }}\left[ {\begin{array}{*{20}{c}} {\rm{1}}\\ 0 \end{array}} \right.\begin{array}{*{20}{c}} \mathit{T}\\ 0 \end{array}\begin{array}{*{20}{c}} 0\\ 1 \end{array}\left. {\begin{array}{*{20}{c}} 0\\ \mathit{T} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\mathit{x}\left( \mathit{k} \right)}\\ {\mathit{\dot x}\left( \mathit{k} \right)}\\ {\mathit{y}\left( \mathit{k} \right)}\\ {\mathit{\dot y}\left( \mathit{k} \right)} \end{array}} \right]{\rm{ + }}{\mathit{\boldsymbol{v}}_{{\rm{2 \times 1}}}} $
(6) 式中, T为信号采集周期,k为采样次数, Z (k)为第k次采样对应的相对位置观测量。将(5)式和(6)式代入到卡尔曼滤波的预测和校正方程后, 即可实现对下一时刻激光斑中心位置的预测,减小跟瞄的时间延迟。卡尔曼滤波算法是一个递归的过程,只需知道初始时刻MUAV坐标测量值和速度计算值,即可得到下一时刻的最优估计,该算法不需要保存其它原始数据,占用内存极小且速度很快,非常适用于本系统中连续实时跟瞄的工作模式。
-
在室外实验中,选用四旋翼MUAV做为实验样机,将硅光电池阵列、单片机芯片电路板及一个NRF52840无线数传模块作为激光跟瞄充电系统的接收端,固定至MUAV底部,光电转换器件采用BPW34S型号的贴片硅光伏电池,其光谱响应范围为400nm~1100nm,响应时间为20ns,最大输出功率可达150mW,硅光电池阵列电压信号由单片机芯片采集后,经扫描跟踪算法处理得到二轴振镜控制电压信号,由无线数传模块传输到地面端;地面端由激光器、光束整形器件、二轴振镜、控制系统及另一无线数传模块组成,考虑到硅光电池对不同波长光转换效率的差异和“大气窗口”的存在,选用输出波长为808nm的光纤输出半导体激光器,在该激光器照射下, 选用硅光电池的光谱灵敏度可达到其最大灵敏度的90%,激光束经非球面镜组成的可变焦光束匀化准直整形器件后,照射到二轴振镜,地面端的无线数传模块将接收到的二轴振镜控制电压信号传输到振镜控制模块,控制振镜电机及其固连的反射镜片转动,进而控制激光束出射方向,实现激光束对硅光电池阵列的实时跟踪。
对MUAV在不同飞行距离和飞行速度条件下进行验证实验测试,该系统可在空中直线距离100m的范围内准确跟踪MUAV,当MUAV在距水平地面80m上空、直径50m区域内水平飞行,MUAV飞行速率低于2m/s时,本激光跟瞄充电系统能实时跟瞄到MUAV进行充电,跟踪精度低于0.63mrad。当MUAV飞行速率超过5m/s后,跟踪效果有所降低,激光束无法保证对硅光电池阵列的实时跟踪。不尽人意的是,由于目前所用硅光电池的光电转换效率较低,且激光能量较高时,受温度影响较大,因此系统整体充电效率不高。若选用允许光照强度大、光电转换效率高的激光电池,可使系统充电效率大幅提升[20-22]。
-
为了延长MUAV的续航时间,基于激光无线充电、振镜扫描和反馈控制等技术的发展,设计并搭建了一套激光对MUAV实时跟瞄充电系统。通过对部分关键器件选取和总体性能优化,以及编写配套的控制软件,实现了地面激光束对空中飞行目标的快速捕获及高精度跟瞄充电。测试结果表明:当MUAV的飞行高度为80m、飞行区域为直径50m的圆形区域,飞行速率低于2m/s时,跟瞄精度低于0.63mrad。因此, 本文中设计的跟瞄充电系统为激光对移动目标的远程实时能量传输提供了一种有效的解决方案。
激光对微型无人机跟瞄充电系统的设计与实现
Design and implementation of a laser tracking, aiming and charging system for micro-unmanned aerial vehicle
-
摘要: 为了提高微型无人机(MUAV)的续航时间, 基于二轴扫描振镜的工作原理, 设计了一套激光对MUAV的远程实时跟瞄充电系统。系统采用硅光电池阵列作为光斑位置传感器, 其信号经扫描跟踪算法处理后, 在地面与MUAV间建立起无线数传反馈链路, 控制二轴扫描振镜改变激光发射方向, 实现激光束对MUAV的扫描与实时跟踪; 同时硅光电池阵列也作为充电器件, 实现对MUAV的实时充电。结果表明, 当MUAV在高度为80m、直径50m圆形区域内以低于2m/s速率飞行时, 可实现激光对MUAV的准确跟踪, 跟瞄精度小于0.63mrad。该系统具有跟踪速度快、瞄准精度高的特点, 为激光对移动目标的远程实时能量传输提供了一种有效的解决方案。Abstract: In order to improve the endurance of the micro-unmanned aerial vehicle (MUAV), based on the working principle of the two-axis scanning galvanometer, a remote real-time laser tracking and pointing charging system for the MUAV was designed. In the system, a silicon photocell array was used as the spot position sensor. Firstly, the signal was processed through a scanning tracking algorithm, then a wireless data transmission feedback link was established between the ground and the MUAV, and the emission direction of a laser beam could be changed by controlling the two-axis scanning galvanometer. At the same time, the silicon photocell array was also used as a charging device to realize real-time charging of MUAV. The experimental test results show that when the MUAV flies at a speed of less than 2m/s in a circular area with a height of 80m and a diameter of 50m, the system can accurately track the MUAV with a tracking accuracy of less than 0.63mrad. It has the characteristics of fast tracking speed and high aiming accuracy. This research provides an effective solution for laser remote real-time energy transmission to moving targets.
-
[1] ZHANG L. Developing trend and key techniques of unmanned aircraft vehicles (UAVs) in foreign countries[J]. Telecommunication Engineering, 2009, 49(7): 88-92(in Chinese). [2] OFFICER OF THE SECRETARY OF DEFENSE. Unmanned systems integrated roadmap FY2011-2036[M]. Washington DC, USA: Se-cretary of Defense, 2011: 52-57. [3] CHEN L. Development and trend of military UAV technology[J]. Aeronautical Science & Technology, 2013(2): 11-14(in Chinese). [4] GREENWOOD W W, LYNCH J P, ZEKKOS D. Applications of UAVS in civil infrastructure[J]. Journal of Infrastructure Systems, 2019, 25(2): 04019002. doi: 10.1061/(ASCE)IS.1943-555X.0000464 [5] SEBASTIAN C, FABIO R, MICHAELA D G, et al. Evaluating multispectral images and vegetation indices for precision farming applications from UAV images[J]. Remote Sensing, 2015, 7(4): 4026-4047. doi: 10.3390/rs70404026 [6] LU Y, MACIAS D, DEAN Z S, et al. A UAV-mounted whole cell biosensor system for environmental monitoring applications[J]. IEEE Transactions on Nanobioscience, 2016, 14(8): 811-817. [7] DUNCAN K J. Laser based power transmission: Component selection and laser hazard analysis[M]. New York, USA: IEEE, 2016: 100-103. [8] LI X Y, WU S Ch, LI Zh X. Laser wireless power transmission technology and its development trend[J]. Spacecraft Engineering, 2015, 24(1): 1-7(in Chinese). [9] LOCKHEED MARTIN AERONAUTICS COMPANY. Lockheed martin performs first ever outdoor flight test of laser powered UAS [DB/OL]. (2012-08-07) [2020-02-08]. https://www.edn.com/electronics-products/electronic-product-releases/opto-electronics-products/4391875/Lockheed-Martin-Performs-First-Ever-Outdoor-Flight-Test-Of-Laser-Powered-UAS. [10] BLACKWELL T. Recent demonstrations of Laser power beaming at DFRC and MSFC[J]. AIP Conference Proceedings, 2005, 766(1): 73-85. [11] KAWASHIMA N, TAKEDA K, YABE K. Application of the laser energy transmission technology to drive a small airplane[J]. Chinese Optics Letters, 2007, 5(101): 109-110. [12] KAZUYA T, NOBUKI K, KYOICHI Y. Laser energy transmission to a small-unmanned aerial vehicle[J]. Transactions of the Japan Society for Aeronautical & Space Sciences, 2008, 7: 27-32. [13] ZHAO Ch M, WANG Y Sh, GUO L D, et al. Development of laser wireless power transmission technology[J]. Laser Technology, 2020, 44(5): 538-545(in Chinese). [14] SHI Zh L, MENG W W, SHEN J Sh, et al. Tracking design of APT system of laser wireless energy transmission for unmanned aerial vehicle[J]. Laser Technology, 2019, 43(6): 809-814 (in Chinese). [15] CUI Z H, FU Sh Y, LI Y M, et al. Research on laser tracking system based on 905nm laser[J]. Laser & Infrared, 2010, 40(9): 950-953(in Chinese). [16] STEINSIEK F. Wireless power transmission experiment as an early contribution to planetary exploration missions[C]// 54th International Astronautical Congress of the International Astronautical Federation. New York, USA: IEEE, 2003: 169-176. [17] HOWELL J T, O'NEILL M J, FORK R L. Advanced receiver/converter experiments for laser wireless power transmission[C]// Proceedings of the 4th International Conference on Solar Power from Space-SPS. New York, USA: IEEE, 2004: 187-194. [18] CHEN Q, ZHANG D C, ZHU D D, et al. Design and experiment for realization of laser wireless power transmission for small unmanned aerial vehicles[J]. Proceedings of the SPIE, 2015, 9671: 96710N. [19] TANG L, ZHONG Y C, ZHANG C X, et al. Research situation and development trend of laser wireless power transmission key technology[J]. Laser Journal, 2017, 38(10): 28-32(in Chinese). [20] ZHANG Y Ch. Theoretical and experimental research on efficiency improvements of laser cells[D]. Beijing: Beijing Institute of Technology, 2016: 78-94(in Chinese). [21] WU Zh N. Beam array shaping for high power semiconductor lasers and study on the photoelectric conversion efficiency of GaAs cells[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2017: 32-54(in Chinese). [22] TAN Y, LU J. Study on three-junction GaAs solar cell thermal stress field by continuous wave laser irradiation[J]. Laser Technology, 2020, 44(2): 250-254(in Chinese). -

 点击查看大图
点击查看大图
图(7)
计量
- 文章访问数: 4949
- HTML全文浏览量: 3424
- PDF下载量: 36
- 被引次数: 0
