 网站地图
网站地图

 下载:
下载:







-
车辆自主驾驶技术在军事和民用中发挥着重要作用,可以承担排爆扫雷、物料运输、汽车辅助驾驶等任务,近年来发展迅速,代表着汽车技术的重要发展方向[1]。车辆自主驾驶技术的核心是行驶安全性。现有自主驾驶方案多采用微波雷达或激光雷达探测障碍物,使用摄像头识别行人与道路交通信号标志[2-3],对于使用激光传感器感知路面信息相关研究较少。不同路面具有不同的物理性质与覆盖特性,如沥青、水泥、泥土路面与覆冰、覆雪、覆水等情况。以上因素对于车辆行驶速度与制动距离的选择具有重要影响,开展路面激光散射特性研究,感知路面信息, 可以为车辆自主驾驶提供决策支持[4],具有重要的应用价值。
已有学者对路面的电磁特性建模开展了相关研究,LIU[5]针对沥青与水泥路面开展了介电常数与散射系数研究。ZHANG[6]研究了毫米波段水泥与沥青路面的面-体复合电磁散射模型,利用多频段地表实测散射数据联合反演地表等效参量。ZHU等人[7]使用时域有限差分(finite-difference time domain, FDTD)法研究了具有1维带限Weierstrass分形特征的水泥混凝土路面系统。CAO[8]开展了目标与路面环境复合电磁散射特性研究。国外学者SARABANDI等人[9-12]针对沥青、水泥路面毫米波散射开展了一系列深入研究。以上研究多集中于微波、毫米波频段路面电磁散射特性,而针对毫米量级起伏的水泥路面激光散射特性研究相关报道较少。一般路面高度起伏为服从高斯分布的随机过程,难以获得确定的路面曲面方程。蒙特卡罗方法本质上利用计算机技术不断迭代产生伪随机数以模拟随机过程,从而获取统计特性,既可以模拟跟踪散射光子的传输过程,也可以用来生成随机粗糙表面。
本文中针对不同粗糙程度水泥路面的激光散射特性展开研究,首先设计粗糙度测量装置,测量水泥路面几何轮廓数据,计算高度均方根与相关长度。使用以上参量采用功率谱频域滤波生成随机粗糙表面。根据切平面近似将粗糙面离散为大量微面元,每个面元上根据菲涅耳公式计算本地场,使用斯特莱顿-朱兰成(Stratton-Chu)方程数值积分获取空间散射场。本文中从概率统计角度使用蒙特卡罗方法生成大量随机粗糙表面,计算空间散射场分布的统计平均值。设计基于虚拟仪器技术的高精度激光散射测量装置,在偏振激光入射条件下对水泥路面双向散射与后向散射特性开展实验测量,对理论模型进行验证。以上研究结果可以为车辆自主驾驶路面信息感知提供参考。
-
在激光波长尺度,常见水泥路面可以看作随机粗糙表面,当激光照射到物体表面时会发生散射。根据麦克斯韦方程和矢量格林函数可以得到Stratton-Chu方程,由本地场通过Stratton-Chu方程数值积分得到空间散射场。随机粗糙表面粗糙程度可以用概率统计参量表征,无法确定具体的粗糙面曲面方程。现有散射场计算方法有两种,一种是近似解析法,用入射角θi代替大量随机分布的本地面元入射角θi, locall,计算量小但误差较大,结果不够精确。另一种是使用蒙特卡罗方法生成大量随机粗糙表面,将每一个粗糙面网格化离散为大量微面元组合,计算每个面元的本地场,然后数值积分计算空间散射场分布,计算精度高,同时可以处理遮蔽效应、多重散射与大角度入射等情况。光电传感器对电场的敏感度远高于磁场,因此只计算散射场电场分量,空间散射场计算如下式所示[13]:
$ \begin{array}{*{20}{c}} \boldsymbol{E}(\boldsymbol{r}) \approx \sum \approx \sum \boldsymbol{n} \times\left[\nabla \times \boldsymbol{E}\left(\boldsymbol{r}^{\prime}\right)\right] G\left(\boldsymbol{r}, \boldsymbol{r}^{\prime}\right)+\\ \left[\boldsymbol{n} \times \boldsymbol{E}\left(\boldsymbol{r}^{\prime}\right)\right] \times G\left(\boldsymbol{r}, \boldsymbol{r}^{\prime}\right)+\\ \left.\left[\boldsymbol{n} \cdot \boldsymbol{E}\left(\boldsymbol{r}^{\prime}\right)\right] \nabla^{\prime} G\left(\boldsymbol{r}, \boldsymbol{r}^{\prime}\right)\right\} \mathrm{d} S^{\prime} \end{array} $
(1) 式中,E(r)为空间散射场,G(r, r′)≈$\frac{{\exp \left( {{\rm{i}}kR} \right)}}{{4{\rm{ \mathsf{ π} }}R}}$exp(-ikr·r′)为远场格林函数,r′为源点位置,r′为源点位置矢量,r为观测点位置矢量,R为观测点到源点的距离, $k = \frac{{2{\rm{ \mathsf{ π} }}}}{\lambda }$为入射波波数(λ为入射光波长),n为本地面元单位法向量,E(r′)为本地场,$\nabla = {\mathit{\boldsymbol{e}}_x}\frac{\partial }{{\partial x}} + {\mathit{\boldsymbol{e}}_y}\frac{\partial }{{\partial y}} + {\mathit{\boldsymbol{e}}_z}\frac{\partial }{{\partial z}}$为哈密顿算符(ex,ey,ez代表笛卡尔直角坐标系3个方向的单位矢量),${\nabla '}$代表对源点进行求偏导数运算,dS′为微面元面积。
-
水泥路面高度起伏服从高斯分布,当条件lc2>2.76δλ成立时(其中lc为相关长度,δ为高度均方根),物体表面曲率半径远大于入射光波长。此时可以将入射点曲面近似为切平面。设入射场电场分量为Ei=(As, isi+Ap, ipi)exp(ikier′),As, i代表s光振幅,Ap, i代表p光振幅,er′代表粗糙面上的入射点位置矢量,即源点位置单位矢量,ki为入射光波矢量,${\mathit{\boldsymbol{s}}_{\rm{i}}} = \frac{{\mathit{\boldsymbol{z}} \times {\mathit{\boldsymbol{k}}_{\rm{i}}}}}{{\left| {\mathit{\boldsymbol{z}} \times {\mathit{\boldsymbol{k}}_{\rm{i}}}} \right|}}$为垂直于入射面方向单位矢量,${\mathit{\boldsymbol{p}}_{\rm{i}}} = \frac{{{\mathit{\boldsymbol{s}}_{\rm{i}}} \times {\mathit{\boldsymbol{k}}_{\rm{i}}}}}{{\left| {{\mathit{\boldsymbol{s}}_{\rm{i}}} \times {\mathit{\boldsymbol{k}}_{\rm{i}}}} \right|}}$为平行于入射面方向单位矢量,本地面元单位法向量为n=${\frac{{ - {f_x}\mathit{\boldsymbol{x}} - {f_y}\mathit{\boldsymbol{y}} + \mathit{\boldsymbol{z}}}}{{\sqrt {1 + f_x^2 + f_y^2} }}}$,其中f(x, y)为表面高度,${{f_x} = \frac{{\partial f}}{{\partial x}}}$,${{f_y} = \frac{{\partial f}}{{\partial y}}}$。本地入射角${{\theta _{{\rm{i}}, {\rm{ locall }}}} = \arccos \left( { - \frac{{{\mathit{\boldsymbol{k}}_{\rm{i}}} \cdot \mathit{\boldsymbol{n}}}}{{\left| {{\mathit{\boldsymbol{k}}_{\rm{i}}}} \right||\mathit{\boldsymbol{n}}|}}} \right)}$,由菲涅耳公式计算本地反射场Er=(rsAs, isr, locall+rpAp, i×pr, locall)exp(ikier′),${\mathit{\boldsymbol{s}}_{{\rm{r}}, {\rm{ locall }}}} = \frac{{\mathit{\boldsymbol{n}} \times {\mathit{\boldsymbol{k}}_{{\rm{r}}, {\rm{ locall }}}}}}{{\left| {\mathit{\boldsymbol{n}} \times {\mathit{\boldsymbol{k}}_{{\rm{r}}, {\rm{ locall }}}}} \right|}}$为垂直于本地面元反射面方向的单位矢量(kr, locall为本地面元反射波波矢量),${\mathit{\boldsymbol{p}}_{{\rm{r}}, {\rm{ locall }}}} = \frac{{{\mathit{\boldsymbol{s}}_{{\rm{r}}, {\rm{ locall }}}} \times {\mathit{\boldsymbol{k}}_{{\rm{r}}, {\rm{ locall }}}}}}{{\left| {{\mathit{\boldsymbol{s}}_{{\rm{r}}, {\rm{ locall }}}} \times {\mathit{\boldsymbol{k}}_{{\rm{r}}, {\rm{ locall }}}}} \right|}}$为平行于本地面元入射面方向的单位矢量,本地场为E(r′)=Ei+Er,其中s光和p光的菲涅耳反射系数如下:
$ \left\{\begin{array}{l} r_{s}=\frac{\cos \theta_{\mathrm{i}, \text { locall }}-\sqrt{n^{2}-\sin ^{2} \theta_{\mathrm{i}, \text { locall }}}}{\cos \theta_{\mathrm{i}, \text { locall }}+\sqrt{n^{2}-\sin ^{2} \theta_{\mathrm{i}, \text { locall }}}} \\ r_{p}=\frac{n^{2} \cos \theta_{\mathrm{i}, \text { locall }}-\sqrt{n^{2}-\sin ^{2} \theta_{\mathrm{i}, \text { locall }}}}{n^{2} \cos \theta_{\mathrm{i}, \text { locall }}+\sqrt{n^{2}-\sin ^{2} \theta_{\mathrm{i}, \text { locall }}}} \end{array}\right. $
(2) 式中,n为水泥路面折射率。将大量微面元本地场代入(1)式进行数值积分, 可以计算空间散射场。
-
设计粗糙度测量系统,使用高精度千分表作为测量元件,精度可达0.001mm,使用步进电机控制精密丝杆旋转,每旋转一周丝杆前进0.5mm,可以获取路面高度起伏与采样间隔数据。计算高度均方根与相关长度的方法如下:
$ \delta^{2}=\frac{1}{N-1}\left[\sum\limits_{i=1}^{N}\left(f_{i}^{2}-N \cdot \bar{f}^{2}\right]\right. $
(3) 式中,N为采样点数,fi为水泥路面高度采样点数值,$\bar f = \frac{1}{N}\sum\limits_{i = 1}^N {{f_i}} $为采样高度平均值。
水泥路面高度采样数值为离散数值,其相关系数的计算公式如下:
$ \rho(l)=\frac{\sum\limits_{i=1}^{N+1-j} f_{i} f_{i+j-1}}{\sum\limits_{i=1}^{N} f_{i}^{2}}, (j=1, 2, \cdots, N) $
(4) 式中,l=(j-1)Δx, Δx为采样间隔,当j的取值使ρ(l)最接近1/e时,此时l的值称为相关长度,记作lc;fi和fi+j-1均为水泥路面高度离散采样值。
取A, B两块水泥路面样块进行测量,A和B长宽均约为100mm。经测量,A样块高度均方根为δA=0.54mm,相关长度为lA=6.12mm,为较光滑样块; B样块高度均方根为δB=1.21mm,相关长度为lB=4.23mm,为较粗糙样块。
-
常见水泥路面可以看作随机粗糙面,随机粗糙面可以看作不同频率的谐波叠加而成,谐波的振幅是独立的高斯变量,使用不同的功率谱函数对大量服从高斯分布的随机数进行频域滤波,然后进行逆快速傅里叶变换可以得到粗糙面模型[14-15]。
$ \begin{aligned} f\left(x_{m}, y_{n}\right)=& \frac{1}{L_{x} L_{y}} \sum\limits_{m_{k}=-M / 2+1}^{M / 2} \sum\limits_{n_{k}=-N / 2+1}^{N / 2} F\left(k_{m_{k}}, k_{n_{k}}\right) \times \\ & \exp \left[\mathrm{i}\left(k_{m_{k}} x_{m}+k_{n_{k}} y_{n}\right)\right] \end{aligned} $
(5) 其中,
$ \begin{array}{c} F\left( {{k_{{m_k}}}, {k_{{n_k}}}} \right) = 2{\rm{ \mathit{ π} }}\sqrt {{L_x}{L_y}S\left( {{k_{{m_k}}}, {k_{{n_k}}}} \right)} \times \\ \left\{ {\begin{array}{*{20}{l}} {\frac{{N(0, 1) + {\rm{i}}N(0, 1)}}{{\sqrt 2 }}, \left( {{m_k} \ne 0, \frac{M}{2}{\kern 1pt} {\kern 1pt} {\rm{and}}{\kern 1pt} {\kern 1pt} {n_k} \ne 0, \frac{M}{2}} \right)}\\ {N(0, 1), \left( {{m_k} = 0, \frac{M}{2}{\kern 1pt} {\kern 1pt} {\rm{or}}{\kern 1pt} {\kern 1pt} {n_k} = 0, \frac{M}{2}} \right)} \end{array}} \right. \end{array} $
(6) 式中, mk和nk为离散变量,取值范围分别为$\left[ {\frac{{ - M}}{{2 + 1}}, \frac{M}{2}} \right]$,$\left[ {\frac{{ - N}}{{2 + 1}}, \frac{N}{2}} \right]$之间的整数,S(kmk, knk)=${\delta ^2}\frac{{{l_x}{l_y}}}{{4{\rm{ \mathsf{ π} }}}}\exp \left( { - \frac{{k_{{m_k}}^2l_x^2 + k_{{n_k}}^2l_y^2}}{4}} \right)$为高斯型功率谱密度函数,lx和ly分别为粗糙面x方向和y方向的相关长度,Lx和Ly分别为粗糙面的长度和宽度,M, N为采样点数,xm=mΔx, yn=nΔy为采样点,Δx和Δy为采样间隔,N(0, 1)为服从标准正态分布的随机数,${k_{{m_k}}} = \frac{{2{\rm{ \mathsf{ π} }}{m_k}}}{{{L_x}}}$和${k_{{n_k}}} = \frac{{2{\rm{ \mathsf{ π} }}{n_k}}}{{{L_y}}}$为离散波数。设置粗糙面长度和宽度为Lx=Ly=100mm,采样点数N=1024×1024,生成2维高斯型随机粗糙表面, 如图 1所示。高度均方根δ=0.3mm,相关长度lc=6mm。

Figure 1. 2-D Gaussian random rough surface was generated by power spectrum filtering
-
仿真参量设置如下:令粗糙面长度和宽度为Lx=Ly=100mm,采样点数N=1024×1024,入射角θi=30°,入射光波长λ=650nm,水泥样块折射率为n=1.5。入射光偏振状态为典型的s光与p光。s光偏振方向垂直于入射面,p光偏振方向平行于入射面。随机粗糙面高度均方根δ为0.3mm, 0.6mm, 0.9mm, 1.2mm;相关长度为lc=6mm。以上参量均与水泥路面比较样块统计参量在同一数量级,便于研究散射光分布特征。使用频域滤波生成10000个随机粗糙面表面,计算散射场平均值。
-
当s光与p光入射水泥路面时,散射光强度分布如图 2所示。s光入射时散射光强度明显大于p光入射,约为其2倍。在高度均方根δ=0.3mm时,在30°镜像方向具有明显的峰值,随着高度均方根的增大,峰值逐渐减小,分布逐渐展宽,均出现峰值位置移动的现象。s光入射时,散射光峰值位置逐渐向散射角增大方向移动,p光入射时向散射角减小方向移动。结果表明, 相关长度lc与高度均方根δ同时影响随机粗糙表面光学粗糙度,相关长度lc越小,高度均方根δ越大,则粗糙面光学粗糙度越大。不同粗糙程度的水泥路面对入射光峰值大小与位置产生调制作用。
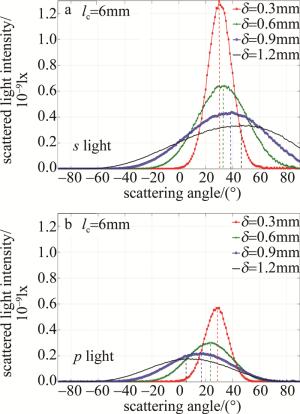
Figure 2. The distribution of scattering light intensity of cement road surface with different incident light
-
对于单站式激光测量系统,如激光雷达,后向散射特性对于目标探测与识别具有重要意义,s光和p光入射水泥路面其后向散射光强度分布如图 3所示。随着高度均方根δ的增大,后向散射光强度随入射角的增大其衰减速度变慢,对于p光与s光,其散射规律相近。当均方根增大到一定程度,粗糙面后向散射表现出朗伯体的散射特征,原因是粗糙度增大造成的多重散射效应使光强度空间分布较为均匀。
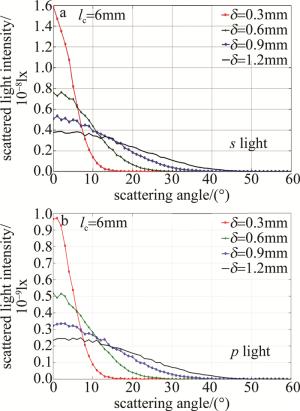
Figure 3. The distribution of back scattering light intensity
-
高度均方根δ增大,本地面元入射角分布将发生改变,每种均方根高度生成10000个粗糙面,统计本地面元入射角的频率分布,如图 4所示。高度均方根δ=0.3mm时,本地面元入射角θi, locall在11°~48°之间,相对集中于镜像附近,随着高度均方根δ的增大,本地面元入射角范围逐步扩大,分布逐渐展宽。本地面元对s光反射率为Rs=rs2,对p光反射率为Rp=rp2。当θi, locall变化时,反射率变化如图 4所示。本地入射角概率密度函数p(θi, locall)和反射率的乘积与散射光强度成正比,使用p(θi, locall)与反射率的乘积拟合散射光强度,如图 5所示。在不同本地入射角条件下,面元对s光的反射率随入射角的增大单调增大,s光入射时水泥路面散射光呈现明显的峰值位置右移。p光在比镜像角度大的方向,面元对p光的反射率在不断减小。随着本地入射角θi, locall分布不断展宽,p光入射时镜像右侧的散射光强度减小,水泥路面出现峰值位置左移的现象。由于反射率Rs>Rp,所以s光入射时, 散射光强度明显大于p光入射情况。
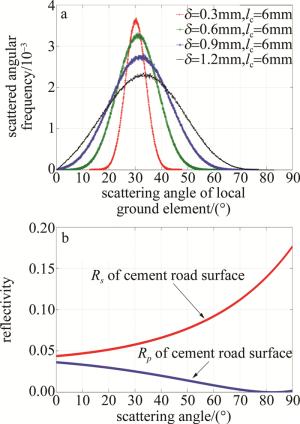
Figure 4. a—the frequency distribution of local ground element incidence angle b—the reflectivity of cement road surface
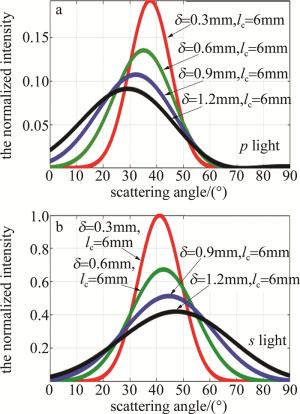
Figure 5. The scattered light intensity distribution was fitted by the product of reflectivity and probability density of surface element
-
为了研究不同粗糙度水泥路面激光散射特性,设计高精度激光散射测量系统如图 6所示。系统基于虚拟仪器技术[16],依托计算机硬件平台使用LabVIEW软件设计灵活、功能可拓展的仪器面板[17-18]。LabVIEW通过图形化编程[19-21]实现与单片机的串口通信,下发控制命令至单片机。单片机控制步进电机1实现转台角度的精确调整,控制步进电机2旋转丝杆传动机构,带动待测样品移动,多次测量求平均值,以获得散射光强度的统计平均值。
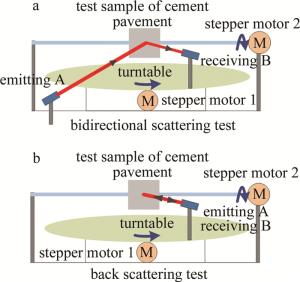
Figure 6. a—bidirectional scattering test b—back scattering test
制作以BH1750FVI为核心的高精度数字型光强度检测模块。BH1750FVI是16位数字输出型集成电路,使用IIC总线与单片机通信,将测量数据上传。其内部的光电传感器具有与人眼相近的光视效率,峰值灵敏波长为560nm,可实现65535lx以内的大范围光强度测量。为避免散射光强度较弱不易测量的情况,激光发射采用型号为LD-650Y2的大功率半导体激光器,输出功率可达250mW,工作电压为3.0V~4.5V,输出功率可随工作电压调整,发射模块含有聚焦与准直透镜,以实现激光散斑直径可调。
-
由于半导体激光器偏振度不够高,使用二向色性偏振片进一步提高入射光的偏振度。使用λ/2波片改变入射光的偏振方向,将入射光调制为s偏振光入射,入射角为40°,实验结果如图 7所示。光滑水泥表面散射光强度在散射角43°时具有峰值90lx,峰值位置向镜像角度40°右侧移动。对粗糙水泥表面,峰值强度下降,分布展宽,峰值位置同样向右侧移动。分析原因是多重散射效应。实验结果与数值模拟具有一致性。
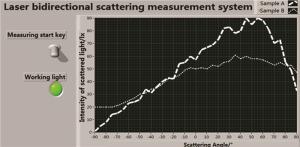
Figure 7. Experimental study on bidirectional scattering under s light was incident
-
后向散射实验同样采用二向色性偏振片提高半导体激光器出射光的偏振度,使用λ/2波片改变入射光的偏振方向,使入射光为s光入射。实验结果如图 8所示。在垂直入射方向附近,后向散射光强度具有峰值103lx。较光滑水泥表面散射随着散射角的增大,散射光强度明显减小。较粗糙水泥表面散射随散射角的增大,散射光强度减小不明显,分析原因为粗糙度增大,多重散射效应增强,粗糙度较大的水泥路面可以近似看做朗伯体,实验结果与数值模拟具有一致性。
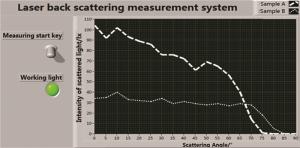
Figure 8. Experimental study on back scattering under s light was incident
-
针对车辆自主驾驶技术中感知路面信息、提高行驶安全性的需求,选取常见的水泥路面进行表面几何轮廓数据测量,计算高度均方根与相关长度。使用斯特莱顿-朱兰成方程数值积分计算散射场,以基尔霍夫切平面近似作为边界条件,使用大量数据模拟的蒙特卡罗方法,研究s光与p光入射时的粗糙面散射特性。设计制作高精度数字型激光散射测量系统,进行实验研究。实验结果表明,光滑水泥路面散射光强度在镜像方向具有极大值,在镜像方向两侧逐步递减。粗糙水泥路面光学特性近似为朗伯体,散射光强度在各散射角方向变化不大。数值模拟结果表明,双向散射中随着高度均方根的增加,散射光强度出现峰值衰减、分布展宽、峰值位置移动。后向散射中,随着高度均方根增加,散射光强度衰减速率减小,实验数据与数值模拟结果具有一致性。以上研究表明,随着粗糙度不同,散射光具有不同的特征分布,可以开展路面识别研究。对于自动驾驶技术路面识别具有应用价值。
水泥路面激光散射特性研究
Research on laser scattering characteristics of cement road surface
-
摘要: 为了通过激光散射特性识别不同粗糙程度水泥路面, 设计了路面粗糙度测量系统。使用千分表测量水泥路面高度分布, 计算高度均方根与相关长度。根据以上参量采用功率谱频域滤波生成随机粗糙表面以模拟水泥路面, 通过切平面近似将粗糙面离散为大量微面元, 由菲涅耳公式计算本地场, 利用蒙特卡罗方法获取不同偏振光入射条件下粗糙面双向与后向散射光强度统计平均值。基于虚拟仪器技术进行高精度自动化激光散射测量, 并根据实验数据对理论模型进行了验证。结果表明, 双向散射小粗糙度水泥路面散射光强度在镜像方向散射角40°附近具有峰值90lx, 在镜像方向两侧逐步递减, 大粗糙度水泥路面光学特性近似为朗伯体, 散射光强度在各散射角方向变化不大; 后向散射在垂直入射时, 小粗糙度水泥路面散射光强度峰值为103lx, 随散射角增大逐渐递减, 大粗糙度水泥路面具有朗伯体散射特征。此研究结果可为车辆自主驾驶方案路面信息感知提供参考。Abstract: In order to identify cement road surface with different roughness by laser scattering characteristic, a road surface roughness measurement system was designed. The height distribution of cement road surface was measured by micrometer, and the root mean square of height and relevant length were calculated. According to the above parameters, the random rough surface was generated by power spectral frequency domain filtering to simulate cement road surface, and the rough surface was dispersed into a large number of surface elements by tangential plane approximation. The local field was calculated by Fresnel formula, and the Monte Carlo method was used to obtain the statistical mean values of bidirectional and the back scattered light intensity on rough surface under different polarized light incident conditions. Based on the virtual instrument technology, the high precision automatic laser scattering measurement was carried out, and then the theoretical model was verified according to the experimental data. The results show that the scattered light intensity of bidirectional scattered cement road surface with small roughness has a peak value of 90lx near the scattering angle of 40° in the mirror direction, and decreases gradually on both sides of the mirror direction. The optical characteristics of cement road surface with large roughness are approximate to Lambert body, and the scattered light intensity has little change in each scattering angle direction. The back scattered light intensity peak of small roughness cement road surface is 103lx when the back scattering is perpendicular to the incidence, which decreases gradually with the increase of scattering angle. The large roughness cement road surface has Lambert scattering characteristics. The above conclusions could provide reference for road information perception of autonomous driving schemes.
-
Key words:
- scattering /
- virtual instrument /
- Monte Carlo method /
- cement road surface /
- laser
-
Figure 2. The distribution of scattering light intensity of cement road surface with different incident light
Figure 4. a—the frequency distribution of local ground element incidence angle b—the reflectivity of cement road surface
Figure 5. The scattered light intensity distribution was fitted by the product of reflectivity and probability density of surface element
-
[1] ZHANG X P. Research on automatic driving technology of vehicle adapted to the condition of curved ramp in underground parking garage[D]. Zhenjiang: Jiangsu University, 2011: 12-16 (in Chinese). [2] WANG W Y. Research on self-tracking of driverless vehicle based on lidar[D]. Xi'an: Chang'an University, 2018: 14-16 (in Chinese). [3] WANG Ch K. Review of autonomous obstacle avoidance technology applied to autonomous driving[J]. Chinese Equipment Engineering, 2018(9): 133-134 (in Chinese). [4] ZHENG X D. Research on intelligent driving automatic control strategy under special roads[D]. Chongqing: Chongqing Jiaotong University, 2018: 22-23 (in Chinese). [5] LIU Q. The study of electromagnetic scattering method to the ground and sea rough surface[D]. Nanjing: Southeast University, 2015: 12-14 (in Chinese). [6] ZHANG Y Y. Study on the electromagnetic scattering characteristics and engineering statistical model of typical land surface[D]. Xi'an: Xidian University, 2017: 21-26 (in Chinese). [7] ZHU X M, REN X Ch. Study on electromagnetic scattering from actual pavement with 1-D band limited Weierstrass fractal characteristics using FDTD[J]. Remote Sensing Technology and Application, 2012, 27(3): 359-365 (in Chinese). [8] CAO Zh. Research on electromagnetic scattering from the target above road surface[D]. Xi'an: Xidian University, 2007: 25-26 (in Chin-ese). [9] LI E S, SARABANDI K. Low grazing incidence millimeter-wave scattering models and measurements for various road surfaces[J]. IEEE Transactions on Antennas & Propagation, 1999, 47(5): 851-861. [10] SARABANDI K, ERIC S. Microstrip ring resonator for soil moisture measurements[J]. IEEE Transactions on Geoscience & Remote Sensing, 2002, 35(5): 1223-1231. [11] SARABANDI K, LI E S, NASHASHIBI A. Modeling and measurements of scattering from road surfaces at millimeter-wave frequencies[J]. IEEE Transactions on Antennas and Propagat, 1997, 45(11): 1679-1688. doi: 10.1109/8.650080 [12] SARABANDI K, LI E S. Polarimetric characterization of debris and faults in the highway environment at millimeter-wave frequencies[J]. IEEE Transactions on Antennas and Propagat, 2000, 48(11): 1756-1768. doi: 10.1109/8.900234 [13] GE D B. Electromagnetic wave theory[M]. Beijing: Science Press, 2011: 446-452 (in Chinese). [14] WANG R, GUO LX, WANG A Q, et al. Investigation of electromagnetic scattering interaction between the buried target and the rough surface[J]. Journal of Microwaves, 2010, 26(s2): 21-24 (in Chinese). [15] GUO L X. Basic theory and method of random rough surface scattering[M]. Beijing: Science Press, 2011: 6-8 (in Chinese). [16] WANG L L, GAO A H, LIU W G, et al. Angle resolution space laser scattering measurement system based on LabVIEW[J]. Optics & Optoelectronic Technology, 2018, 16(3): 40-45 (in Chinese). [17] WANG L L. Optimization design and experimental research of BRDF measurement system[D]. Xi'an: Xi'an Technology University, 2018: 16-18 (in Chinese). [18] XIE W, LAN Zh G, QI X. Optical communication detection tracking system based on virtual instrument technology[J]. Laser Journal, 2017, 38(4): 85-89(in Chinese). [19] PENG G. Speed measurement of automotive laser based on labview[J]. Journal of Computer Applications, 2017, 32(10): 49-53(in Chinese). [20] LIU L B, HE X H. Design and implementation of laser ranging system based on virtual instrment technology[J]. Optics & Optoelectronic Technology, 2017, 32(10): 16-21(in Chinese). [21] LI M, LIU W R. Multiple-scattering effects on the visibility mea-surement of laser transmissometers in fog[J]. Laser Technology, 2020, 44(4): 503-508 (in Chinese). -

 点击查看大图
点击查看大图

图(8)
计量
- 文章访问数: 10093
- HTML全文浏览量: 8475
- PDF下载量: 21
- 被引次数: 0
