 网站地图
网站地图











-
近年来,随着无人机(unmanned aerial vehicle, UAV)技术的快速发展,使得无人机被广泛应用于军事和民用领域当中[1]。由于单个无人机具有载荷能力有限、续航时间短、执行作业简单等特点,难以更好地适应高复杂性作业任务。而无人机编队凭借着协调能力强、作业时间长、探测范围广等优点,通过编队间的互相协作展现出执行复杂性作业任务的优势,使其能够在军事作战、火灾救援、地质勘探等众多领域中突显作用[2-4]。
无人机编队控制技术主要包括编队集结[5]、队形保持、队形重构、编队避障,其中编队避障是无人机编队执行任务的前提与保障。目前编队避障控制方法主要有人工势场法、虚拟结构法、基于行为法、领航跟随法等[6],而人工势场法依赖于算法设计简单,容易实现等优点被广泛应用于无人机避障当中。但人工势场法本身会存在局部极小值问题,即当无人机所受斥力与引力大小相等且方向相反时合力为零表现为局部盘旋[7],解决方法是对无人机施加随机扰动使无人机逃离局部极小值点从而继续飞行,并在传统势场法基础上改进避免出现局部极小值的情况[8-10]。在无人机集群避障控制方面,参考文献[11]中提出一种采用分布式跟踪算法控制各无人机的位置和速度,并引入改进的人工势场法进行避障的3维无人机集群控制方法。针对存在动态障碍物的情况,在避障的基础上引入非线性模型预测控制方法,并给出具体模型的成本函数和约束条件,为无人机避开动态障碍物提供了解决方案[12]。当障碍物较多时,通过卡尔曼滤波预测障碍物的轨迹,结合传感器获得的数据对障碍物进行跟踪,最后验证了避障算法的性能[13]。目前将人工势场法与其它算法相结合的文献较多,但上述文献中大多是对于单个无人机或少部分无人机组成的编队进行研究。而且无人机编队避障时还有诸多问题,比如无人机编队避障时编队控制难度增大,增加了编队执行任务的时间;对于编队间通信受限时的编队控制问题研究较少,这些问题都制约了无人机编队避障方向的发展。
在机间通信方面,无人机编队间通信具备近距离、高动态、自组织等特点[14],由于复杂大气环境和电磁干扰的影响,导致无人机编队飞行状态不稳定的情况时有发生。而无线紫外光(ultraviolet, UV)通信利用大气微粒对紫外光的散射进行信息传递,具备非直视通信、低窃听率、全天候工作、抗干扰能力强等优势,更加适合于无人机编队在强电磁干扰环境下的信息交互,可以作为无人机编队机间通信的可靠保障[15]。参考文献[16]中针对无人机编队作战周期短、链路质量变化快等特点,提出小样本链路快速评估算法,实现对节点分布的快速估算,最后仿真验证所提方法对编队通信网络的有效性。对于多无人机通信带宽有限问题,通过动态频谱交互使编队实现有序通信,提出动态时隙分配方案增强了编队通信效率[17]。针对无人机局部信息交互问题,有学者将一致性理论应用到无人机编队控制当中,降低了信息交互的计算量,促进了无人机编队控制方面的发展[18-19]。
为解决强电磁干扰环境使无人机编队通信受限从而影响编队避障、队形稳定等问题,本文中提出紫外光通信协作无人机防撞编队控制方法,利用紫外光抗干扰能力强的特点,构建机间紫外光通信模型,改进传统势场法的势场函数,将改进后的避障算法与一致性算法结合,使编队避障完成后能够迅速恢复回原始队形,从而提高编队作战时的机动能力,为编队执行复杂作战任务提供重要基础。
-
本文中主要研究3维环境中无人机防撞编队控制和队形保持的问题,所以只考虑无人机质心处的运动,采用无人机运动方程[18]为:
$ \left\{\begin{array}{l} x_i{ }^{\prime}=\boldsymbol{v}_i \cos \omega_i \cos \varphi_i \\ y_i{ }^{\prime}=\boldsymbol{v}_i \cos \omega_i \sin \varphi_i \\ z_i{ }^{\prime}=\boldsymbol{v}_i \sin \omega_i \end{array}\right. $
(1) 式中,(xi, yi, zi)分别为无人机i在x, y, z方向上的位置坐标,vi为无人机的速度,ωi和φi分别为无人机的俯仰角和偏航角。
为简化问题,本文中无人机均在同一高度飞行,且编队在初始时刻已经集结成初始队形,采用2阶积分模型:
$ \left\{\begin{array}{l} \boldsymbol{q}_i{ }^{\prime}=\boldsymbol{v}_i \\ \boldsymbol{v}_i{ }^{\prime}=\boldsymbol{u}_i \end{array}\right. $
(2) 式中,qi为无人机的位置,ui为无人机的控制输入量,通过设计ui使无人机实现队形保持。
-
本文中利用拓扑图来表示编队间的通信关系,将单个无人机作为图中的一个节点,编队间的信息交互作为图的边,则编队中信息交互关系可用拓扑有向图G=(W, E, A)表示,W={wi}(i=1, …, n)表示节点集合,E={eij}(i, j∈W)表示边集合,用邻接矩阵A={aij}(1 < i, j < n)表示通信拓扑关系,可描述为:
$ a_{i j}=\left\{\begin{array}{l} 1, \left(w_j \in N_i ; i=1, 2, \cdots, n\right) \\ 0, \left(w_j \notin N_i ; i=1, 2, \cdots, n\right) \end{array}\right. $
(3) 式中,Ni={wj}(eji∈E, j≠i)为拓扑图中与UAVi通信的无人机集合。本文中采用的“V”形无人机编队拓扑结构如图 1所示。
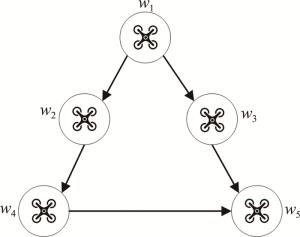
图 1 无人机编队通信拓扑结构
Figure 1. UAV formation communication topology
定义w1为领航者无人机,其余均为跟随者无人机,由图 1可知,5架无人机对应节点集合为W={w1, w2, w3, w4, w5},边集合E={e12, e13, e24, e35, e45},无人机编队间通信由对应的邻接矩阵所决定。
-
无人机通过搭载紫外设备实现编队间的相互通信,进而达到编队间整体飞行稳定。由于日盲波段的紫外光具有抗干扰能力强、隐秘通信的特点,更适合于电磁干扰环境下无人机编队间的信息交互。而编队中的无人机都是相对动态的,所以无人机编队间通信为非直视(none-line-of-sight, NLOS)单次散射,其单次散射通信模型[15]如图 2所示。
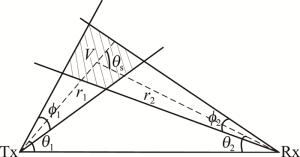
图 2 紫外光非直视单次散射通信模型
Figure 2. UV non-direct view single scattering link model
图 2中,Tx为信号发送端,Rx为信号接收端,θ1和θ2分别为发送仰角和接收仰角,ϕ1为信号发送端的发散角,ϕ2为信号接收端的视场角,V是收发信号间有效散射体体积,r1和r2为信号发送端、接收端分别到V的距离,θs为θ1与θ2的散射夹角。
紫外发射光源采用半球形紫外发光二极管(light-emitting diode, LED),结构如图 3所示。半球形紫外LEDs采用全向发送的方式时刻发送紫外光信号,其表面由经线和纬线相交而成,在每处经纬线相交的地方安装紫外LED, 则每处紫外LED都有固定的编号,例如第5条纬线和第4条经线相交处的LED编号为(5, 4)。
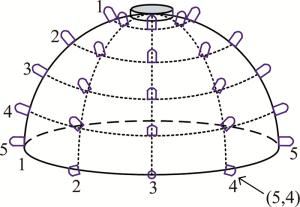
图 3 半球形紫外LEDs
Figure 3. Hemispherical UV LEDs
通过在无人机上搭载紫外光LEDs可以实现编队间的互相通信,相邻无人机可以通过接收紫外光功率及接收角度得到彼此间的相对位置,其紫外光通信接收光功率[15]为:
$ \begin{aligned} & P_{\mathrm{r}, \mathrm{NLO} \mathrm{S}}= \frac{P_{\mathrm{t}} A_{\mathrm{r}} K_{\mathrm{s}} P_{\mathrm{s}} \phi_2 \phi_1^{\ \ 2} \sin \left(\theta_1+\theta_2\right)}{32 \mathsf{π}^3 r \sin \theta_1\left[1-\cos \left(\frac{\phi_1}{2}\right)\right]} \times \\ & \exp \left[-\frac{K_{\mathrm{e}} r\left(\sin \theta_1+\sin \theta_2\right)}{\sin \left(\theta_1+\theta_2\right)}\right] \end{aligned} $
(4) 式中,Pr, NLOS为接收光功率,Pt为发射光功率,Ar为接收孔径面积,Ke为大气信道衰减系数,Ks为散射系数,Ps为散射相函数,根据(4)式和Lambert函数W(·)可求出搭载无人机上信号发送端与接收端之间通信的距离为:
$ r=\frac{W\left(\frac{P_{\mathrm{t}} A_{\mathrm{r}} K_{\mathrm{s}} P_{\mathrm{s}} \phi_2 \phi_1{ }^2 K_{\mathrm{e}}\left(\sin \theta_1+\sin \theta_2\right)}{P_{\mathrm{r}, \mathrm{NLOS}} 32 \mathsf{π}^3 \sin \theta_1\left[1-\cos \left(\frac{\phi_1}{2}\right)\right]}\right)}{\frac{K_{\mathrm{e}}\left(\sin \theta_1+\sin \theta_2\right)}{\sin \left(\theta_1+\theta_2\right)}} $
(5) 得到(5)式结果后,可按照无人机在空间中的几何关系求出无人机相对位置信息, 如图 4所示。
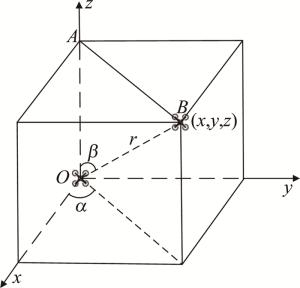
图 4 无人机空间几何关系
Figure 4. UAV spatial geometric relationship
图 4中设两架无人机坐标分别为O(0, 0, 0),B(x, y, z),r为两架无人机之间的距离,β为OB与z轴的夹角,α是B位置上无人机到xOy面上的投影与x轴所形成的夹角,则可得到B位置上无人机相对于O位置上无人机的位置为:
$ \left\{\begin{array}{l} x=r \sin \beta \cos \alpha \\ y=r \sin \beta \sin \alpha \\ z=r \cos \beta \end{array}\right. $
(6) -
将一致性理论引入到人工势场中,令aij表示UAVi与UAVj的通信权重,Ni表示能与UAVi通信的所有无人机集合,只有与UAVi通信的无人机才可以获得UAVi的状态信息,如空间位置、飞行速度等。qi=(xi, yi, zi)T为UAVi的空间位置,‖qij‖=‖qi-qj‖表示UAVi与UAVj的欧氏距离,UAVi与UAVj之间的势场为ψ(‖qij‖),对势场求负梯度可得两架无人机间虚拟力为F(qij)=-▽ψ(‖qij‖)。
则UAVi的总势场为:
$ \begin{gathered} \boldsymbol{\psi}\left(\boldsymbol{q}_i\right)=\sum\limits_{j \in N_i}\left[a_{i j} \boldsymbol{\psi}\left(\left\|\boldsymbol{q}_{i j}\right\|\right)\right]= \\ \sum\limits_{j \in N_i}\left[a_{i j} \boldsymbol{\psi}_{\mathrm{a}}\left(\left\|\boldsymbol{q}_{i j}\right\|\right)\right]+\sum\limits_{j \in N_i}\left[a_{i j} \boldsymbol{\psi}_{\mathrm{r}}\left(\left\|\boldsymbol{q}_{i j}\right\|\right)\right] \end{gathered} $
(7) 式中,Ni={wj}(‖qi-qj‖ < R),R为UAVi的最大通信距离,ψa(qi)为UAVi的引力场,ψr(qi)为UAVi的斥力场,ψ(qi)为UAVi与最大通信范围内其它无人机所产生的势场总和。
对于无人机编队间的避障,需要同时构建机间引力场与斥力场函数,定义编队间引力场函数为:
$ \boldsymbol{\psi}_{i j, \mathrm{a}}\left(\left\|\boldsymbol{q}_{i j}\right\|\right)=\left\{\begin{array}{l} \frac{1}{2} a_{i j} k_1\left\|\boldsymbol{q}_{i j}\right\|^2, \left(\left\|\boldsymbol{q}_{i j}\right\| \in D\right) \\ 0, \text { ( other }) \end{array}\right. $
(8) 式中,k1为引力场的幅度系数,通过改变k1的大小可以调节势场的强度; D=(rmin, d1]∪(d2, R]为势场函数的作用区域; d1, d2为期望距离d的下限和上限,当编队间的距离d1 < ‖qij‖ < d2时,令势场函数为零,此时无人机编队间处于平衡状态;rmin为机间最小安全距离,当‖qij‖ < rmin时,编队间可能会发生碰撞;当‖qij‖>R时,此时无人机不会受到势场的作用。
定义编队间斥力场函数为:
$ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \boldsymbol{\psi}_{i j, \mathrm{r}}\left(\left\|\boldsymbol{q}_{i j}\right\|\right)=\\ \left\{\begin{array}{l} a_{i j} \frac{b}{\exp \left(\frac{\left\|\boldsymbol{q}_{i j}\right\|}{c}\right)-\exp \left(\frac{\left\|\boldsymbol{q}_{i j}\right\|_{\text {min }}}{c}\right)}, \left(\left\|\boldsymbol{q}_{i j}\right\| \in D\right) \\ 0, (\text { other) } \end{array}\right. $
(9) 式中,b, c各自代表斥力场幅值和变化速度,两者均是常数。当编队间距离rmin < ‖qij‖ < d1时,斥力场起主要作用避免编队相撞;当编队间距d2 < ‖qij‖ < R时,引力场起主要作用避免编队相互分离。由(8)式、(9)式可得无人机间所受虚拟力为:
$ \begin{gathered} \boldsymbol{F}\left(\boldsymbol{q}_i\right)=-\nabla \boldsymbol{\psi}_{i, \mathrm{a}}\left(\boldsymbol{q}_i\right)-\nabla \boldsymbol{\psi}_{i, \mathrm{r}}\left(\boldsymbol{q}_i\right)= \\ \sum\limits_{j \in N_i}\left\{a _ { i j } \left[-k_1\left\|\boldsymbol{q}_{i j}\right\|+\frac{b}{c} \cdot\right.\right. \\ \left.\left.\frac{\exp \left(\left\|\boldsymbol{q}_{i j}\right\| / c\right)}{\left[\exp \left(\left\|\boldsymbol{q}_{i j}\right\| / c\right)-\exp \left(\left\|\boldsymbol{q}_{i j}\right\|_{\text {min }} / c\right)\right]^2}\right] \frac{\boldsymbol{q}_i-\boldsymbol{q}_j}{\left\|\boldsymbol{q}_{i j}\right\|}\right\} \end{gathered} $
(10) 针对外部障碍物的规避,由于障碍物是静止的,所以必须在无人机与障碍物之间引入斥力场促使无人机主动避开障碍物,当无人机顶部所安装的紫外LED探测到障碍物时避障即可。设空域中障碍物坐标位置为qo=(xo, yo, zo)T,定义无人机和障碍物间的斥力场为:
$ \begin{array}{*{20}{c}} & \boldsymbol{\psi}_{i, \mathrm{r}}\left(\left\|\boldsymbol{q}_{i, \mathrm{o}}\right\|\right)=\left[1+k\left(\boldsymbol{v}_{\mathrm{o}}\right)\right] \cdot \\ & \frac{b_{\mathrm{o}}}{\exp \left(\left\|\boldsymbol{q}_{i, \mathrm{o}}\right\| / c_{\mathrm{o}}\right)-\exp \left(\left\|\boldsymbol{q}_{i, \mathrm{o}}\right\|_{\min } / c_{\mathrm{o}}\right)} \\ & \end{array} $
(11) 其中,
$ \begin{gathered} k\left(\boldsymbol{v}_{\mathrm{o}}\right)= \\ \left\{\begin{array}{l} \exp \left(-1 / \boldsymbol{v}_{\mathrm{o}}\right), \left(\boldsymbol{v}_{\mathrm{o}}>0, \left\|\boldsymbol{q}_{i, \mathrm{o}}\right\|<\left\|\boldsymbol{q}_{i, \mathrm{o}}\right\|_{\max }\right) \\ 0, (\text { other }) \end{array}\right. \end{gathered} $
(12) 式中, bo和co各自代表斥力场的幅值和变化速度,两者均是常数; ‖qi, o‖min为无人机和障碍物间最小安全距离,‖qi, o‖max表示无人机与障碍物之间的避障临界距离,当无人机与障碍物之间的距离大于此值时该无人机不需要开始避障; k(vo)为引入的速度项函数; vo代表无人机和障碍物间的相对运动速度,vo>0代表无人机正在向障碍物所在的方向飞行, 否则vo≤0。则无人机所受障碍物斥力为:
$ \begin{gathered} \boldsymbol{F}\left(\boldsymbol{q}_{i, \mathrm{o}}\right)=-\nabla \boldsymbol{\psi}_{i, \mathrm{r}}\left(\left\|\boldsymbol{q}_{i, \mathrm{o}}\right\|\right)=\left[1+\exp \left(-1 / \boldsymbol{v}_{\mathrm{o}}\right)\right] \cdot \\ \frac{b_{\mathrm{o}}}{c_{\mathrm{o}}} \frac{\exp \left(\left\|\boldsymbol{q}_{i, \mathrm{o}}\right\| / c_{\mathrm{o}}\right)}{\left[\exp \left(\left\|\boldsymbol{q}_{i, \mathrm{o}}\right\| / c_{\mathrm{o}}\right)-\exp \left(\left\|\boldsymbol{q}_{i, \mathrm{o}}\right\|_{\min } / c_{\mathrm{o}}\right)\right]^2} \cdot \\ \frac{\boldsymbol{q}_i-\boldsymbol{q}_{\mathrm{o}}}{\left\|\boldsymbol{q}_{i, \mathrm{o}}\right\|} \end{gathered} $
(13) -
传统避障算法将障碍物所产生的斥力场取负梯度作为在无人机上的力,该控制力作用在无人机上会存在时间上的滞后性。为解决上述问题,将势场取负梯度后定义为无人机的速度场,则有:
$ \begin{gathered} \boldsymbol{v}_i\left(\boldsymbol{q}_i\right)=-\nabla \boldsymbol{\psi}\left(\boldsymbol{q}_i\right)-\nabla \boldsymbol{\psi}\left(\boldsymbol{q}_{i, \mathrm{o}}\right)=\sum\limits_{j \in N_i}\left\{a_{i j} \cdot\right. \\ {\left[-k_1\left\|\boldsymbol{q}_{i j}\right\|+\frac{b}{c} \frac{\exp \left(\left\|\boldsymbol{q}_{i j}\right\| / c\right)}{\left.\left[\exp \left(\left\|\boldsymbol{q}_{i j}\right\| / c\right)-\exp \left(\left\|\boldsymbol{q}_{i j}\right\|_{\min } / c\right)\right]^2\right]}\right] .} \\ \left. {\frac{{{{\boldsymbol{q}}_i} - {{\boldsymbol{q}}_j}}}{{\left\| {{{\boldsymbol{q}}_{ij}}} \right\|}}} \right\} + \left[ {1 + \exp \left( { - \frac{1}{{{{\boldsymbol{v}}_{\rm{o}}}}}} \right)} \right]\frac{{{b_{\rm{o}}}}}{{{c_{\rm{o}}}}} \cdot \\ \frac{\exp \left(\left\|\boldsymbol{q}_{i, \mathrm{o}}\right\| / c_{\mathrm{o}}\right)}{\left[\exp \left(\left\|\boldsymbol{q}_{i, \mathrm{o}}\right\| / c_{\mathrm{o}}\right)-\exp \left(\left\|\boldsymbol{q}_{i, \mathrm{o}}\right\|_{\text {min }} / c_{\mathrm{o}}\right)\right]^2} \cdot \\ \frac{\boldsymbol{q}_i-\boldsymbol{q}_{\mathrm{o}}}{\left\|\boldsymbol{q}_{i, \mathrm{o}}\right\|} \end{gathered} $
(14) 无人机的期望速度可表示为vi, d=vi(qi)+vi,vi, d代表无人机的期望速度,vi表示无人机上一时刻的速度。将期望速度用3个速度分量表示为:
$\left\{ {\begin{array}{*{20}{l}} {{{\boldsymbol{v}}_{x,i,{\rm{d}}}} = \sum\limits_{j \in {N_i}} {\left\{ {{a_{ij}}\left[ { - {k_1}\left\| {{{\boldsymbol{q}}_{ij}}} \right\| + \frac{b}{c}\frac{{\exp \left( {\left\| {{{\boldsymbol{q}}_{ij}}} \right\|/c} \right)}}{{{{\left[ {\exp \left( {\left\| {{{\boldsymbol{q}}_{ij}}} \right\|/c} \right) - \exp \left( {{{\left\| {{{\boldsymbol{q}}_{ij}}} \right\|}_{\min }}/c} \right)} \right]}^2}}}} \right]\frac{{{{\boldsymbol{q}}_i} - {{\boldsymbol{q}}_j}}}{{\left\| {{{\boldsymbol{q}}_{ij}}} \right\|}}} \right\}} + \left[ {1 + \exp \left( { - \frac{1}{{{{\boldsymbol{v}}_{\rm{o}}}}}} \right)} \right].}\\ \ \ \ \ \ \ \ \ \ \ \ \ {\frac{{{b_{\rm{o}}}}}{{{c_{\rm{o}}}}}\frac{{\exp \left( {\left\| {{{\boldsymbol{q}}_{i,{\rm{o}}}}} \right\|/{c_{\rm{o}}}} \right)}}{{{{\left[ {\exp \left( {\left\| {{q_{i,{\rm{o}}}}} \right\|/{c_{\rm{o}}}} \right) - \exp \left( {\left\| {{{\boldsymbol{q}}_{i,{\rm{o}}}}} \right\|{{\boldsymbol{q}}_{\min }}/{c_{\rm{o}}}} \right)} \right]}^2}}}\frac{{{{\boldsymbol{q}}_i} - {{\boldsymbol{q}}_{\rm{o}}}}}{{\left\| {{{\boldsymbol{q}}_{i,{\rm{o}}}}} \right\|}} + {{\boldsymbol{v}}_{x,i}}}\\ {{{\boldsymbol{v}}_{y,i,{\rm{d}}}} = \sum\limits_{j \in {N_i}} {\left\{ {{a_{ij}}\left[ { - {k_1}\left\| {{{\boldsymbol{q}}_{ij}}} \right\| + \frac{b}{c}\frac{{\exp \left( {\left\| {{{\boldsymbol{q}}_{ij}}} \right\|/c} \right)}}{{{{\left[ {\exp \left( {\left\| {{{\boldsymbol{q}}_{ij}}} \right\|/c} \right) - \exp \left( {{{\left\| {{{\boldsymbol{q}}_{ij}}} \right\|}_{\min }}/c} \right)} \right]}^2}}}} \right]\frac{{{{\boldsymbol{q}}_i} - {{\boldsymbol{q}}_j}}}{{\left\| {{{\boldsymbol{q}}_{ij}}} \right\|}}} \right\}} + \left[ {1 + \exp \left( { - \frac{1}{{{{\boldsymbol{v}}_{\rm{o}}}}}} \right)} \right].}\\ \ \ \ \ \ \ \ \ \ \ \ \ {\frac{{{b_{\rm{o}}}}}{{{c_{\rm{o}}}}}\frac{{\exp \left( {\left\| {{{\boldsymbol{q}}_{i,{\rm{o}}}}} \right\|/{c_{\rm{o}}}} \right)}}{{{{\left[ {\exp \left( {\left\| {{{\boldsymbol{q}}_{i,{\rm{o}}}}} \right\|/{c_{\rm{o}}}} \right) - \exp \left( {{{\left\| {{{\boldsymbol{q}}_{i,{\rm{o}}}}} \right\|}_{\min }}/{c_{\rm{o}}}} \right)} \right]}^2}}} \cdot \frac{{{{\boldsymbol{q}}_i} - {{\boldsymbol{q}}_{\rm{o}}}}}{{\left\| {{{\boldsymbol{q}}_{i,{\rm{o}}}}} \right\|}} + {{\boldsymbol{v}}_{y,i}}}\\ {{{\boldsymbol{v}}_{z,i,{\rm{d}}}} = \sum\limits_{j \in {N_i}} {\left\{ {{a_{ij}}\left[ { - {k_1}\left\| {{{\boldsymbol{q}}_{ij}}} \right\| + \frac{b}{c}\frac{{\exp \left( {\left\| {{{\boldsymbol{q}}_{ij}}} \right\|/c} \right)}}{{{{\left[ {\exp \left( {\left\| {{{\boldsymbol{q}}_{ij}}} \right\|/c} \right) - \exp \left( {{{\left\| {{{\boldsymbol{q}}_{ij}}} \right\|}_{\min }}/c} \right)} \right]}^2}}}} \right]\frac{{{{\boldsymbol{q}}_i} - {{\boldsymbol{q}}_j}}}{{\left\| {{{\boldsymbol{q}}_{ij}}} \right\|}}} \right\}} + \left[ {1 + \exp \left( { - \frac{1}{{{{\boldsymbol{v}}_{\rm{o}}}}}} \right)} \right] \cdot }\\ \ \ \ \ \ \ \ \ \ \ \ \ {\frac{{{b_{\rm{o}}}}}{{{c_{\rm{o}}}}}\frac{{\exp \left( {\left\| {{{\boldsymbol{q}}_{i,{\rm{o}}}}} \right\|/{c_{\rm{o}}}} \right)}}{{{{\left[ {\exp \left( {\left\| {{{\boldsymbol{q}}_{i,{\rm{o}}}}} \right\|/{c_{\rm{o}}}} \right) - \exp \left( {\left\| {{{\boldsymbol{q}}_{i,{\rm{o}}}}} \right\|{{\boldsymbol{q}}_{{\rm{min }}}}/{c_{\rm{o}}}} \right)} \right]}^2}}}\frac{{{{\boldsymbol{q}}_i} - {{\boldsymbol{q}}_{\rm{o}}}}}{{\left\| {{{\boldsymbol{q}}_{i,{\rm{o}}}}} \right\|}} + {{\boldsymbol{v}}_{z,i}}} \end{array}} \right. $
(15) 式中,vx, i, vy, i, vz, i分别为上一时刻无人机速度的坐标分量; vx, i, d, vy, i, d, vz, i, d为无人机期望速度的坐标轴分量。将速度场转化为无人机速度vi, d、俯仰角ωi, d、偏航角φi, d有:
$ \left\{\begin{array}{l} \boldsymbol{v}_{i, \mathrm{~d}}=\sqrt{\left(\boldsymbol{v}_{x, i, \mathrm{~d}}\right)^2+\left(\boldsymbol{v}_{y, i, \mathrm{~d}}\right)^2+\left(\boldsymbol{v}_{z, i, \mathrm{~d}}\right)^2} \\ \boldsymbol{\omega}_{i, \mathrm{~d}}=\arctan \left(\frac{\boldsymbol{v}_{y, i, \mathrm{~d}}}{\boldsymbol{v}_{x, i, \mathrm{~d}}}\right) \\ \boldsymbol{\varphi}_{i, \mathrm{~d}}=\arctan \left(\frac{\boldsymbol{v}_{z, i, \mathrm{~d}}}{\boldsymbol{v}_{x, i, \mathrm{~d}}}\right) \end{array}\right. $
(16) 利用(16)式可实现对无人机速度和方向的调整,从而使无人机避开障碍物继续保持飞行,其无人机防撞编队控制算法流程图如图 5所示。

图 5 无人机防撞编队控制算法
Figure 5. UAV anti-collision formation control algorithm
由图 5可以看出,无人机编队先通过自身搭载的紫外传感器与通信领域内的无人机进行信息交互以获得相邻无人机的信息,包括速度、航向角等。其次,在传感器的检测范围内没有出现障碍物时,即满足‖qi, o‖>‖qi, o‖max时,编队间无需考虑规避外部障碍物,此时只考虑编队间队形距离是否为期望距离即可;当无人机所安装的传感器探测出障碍物后,此时无人机编队需要运行无人机与空域障碍物之间的避障算法,传感器实时探测编队中每架无人机的速度方向vi/‖vi‖和无人机与障碍物所形成连线的方向qi, o/‖qi, o‖是否垂直。如果不垂直,而该无人机的速度和航向保持不变,则代表该无人机可能会与外部障碍物发生碰撞,所以需要对该架无人机的加速度进行调整,以此改变无人机的航向从而避免与障碍物发生碰撞。如果垂直,则表示无人机与障碍物不会发生碰撞,只需继续保持编队队形即可。
-
为了验证改进人工势场法在无人机编队中的防撞控制效果,作者在MATLAB2019B平台搭建无人机编队仿真环境进行实验。该仿真环境选取60 m×40 m×20 m的3维空域范围作为仿真区域,对由5架无人机组成的固定编队进行仿真,其中最中间为领航者无人机,时刻向周围其它无人机广播自身状态信息,其余4架均为跟随者无人机并时刻跟随领航者无人机。
具体仿真过程为:初始时刻5架无人机按照“V”形固定在同一高度等待出发指令,给定领航者无人机到达目标点位置信息为(60 m, 40 m, 10 m),领航者受到目标点引力作用而向目标点飞行,同时其它无人机接收到领航者指令信息而跟随飞行;在编队飞行路径中设置多个大小不同的静态障碍物,当任一架无人机上传感器检测到障碍物时该无人机会受到斥力场作用而改变原先航向,并实时将自身状态改变信息发送给编队内其它无人机;当任一架无人机避障完成后会及时跟上领航者保持编队原有队形结构,直至无人机编队中领航者无人机到达目标点为止结束仿真。
仿真总时间为160 s,步长为0.1 s,无人机初始速度均设置为零,无人机最大速度上限设置为4 m/s,无人机编队间通信拓扑的邻接矩阵为:
$ \boldsymbol{A}=\left[\begin{array}{lllll} 0 & 0 & 0 & 0 & 0 \\ 1 & 0 & 0 & 0 & 0 \\ 1 & 0 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 & 0 \\ 0 & 0 & 1 & 1 & 0 \end{array}\right] $
(17) 式中, 1表示两个节点间存在通信,为0则表示不通信。
无人机邻域划分参数:rmin=2 m,R=10 m,期望距离d=5 m。人工势场参数[18]:k1=0.0061,b=1,c=1,bo=0.1,co=0.1,‖qij‖min=2 m,‖qij‖max=10 m。所采取的无人机防撞编队控制算法具体参数如表 1所示。
表 1 编队初始仿真参数
Table 1. Initial simulation parameters of formation
drone spatial location qi/m speed vi/(m·s-1) pitch angle ωi/(°) yaw angle φi/(°) UAV1 [0, 9, 10]T 0 0 0 UAV2 [4, -3, 10]T 0 0 45 UAV3 [5, 1, 10]T 0 0 -45 UAV4 [3, 7, 10]T 0 0 90 UAV5 [6, 5, 10]T 0 0 0 为了便于分析无人机编队的防撞控制效果和编队间的一致性,将障碍物简化为半径大小不同的球体,其具体参数如表 2所示。
表 2 障碍物参数信息
Table 2. Obstacle parameter information
obstacle spatial location qo/m radius/m minimum range ‖qi, o‖min/m maximum range ‖qi, o‖max/m 1 [16, 12, 10]T 1 2 10 2 [20, 19, 10]T 1.3 2.6 13 3 [40, 28, 10]T 1.3 2.6 13 -
为了体现出本文中改进算法的避障效果,在目标点和障碍物位置都相同的情况下,分别在单架无人机上对传统人工势场算法、改进后人工势场算法和动态窗口法进行避障仿真对比,其对比曲线如图 6所示。由图 6看出, 3种算法下的无人机均可以避开障碍物到达目标点,其中动态窗口法耗时22.28 s,路径总长度为15.7 m,这是因为动态窗口法未能提前获取障碍物信息,而是依靠自身传感器不断对速度进行评价和选择,所以使得避障轨迹偏大。而传统人工势场法耗时20.32 s,路径总长度为14.29 m,相比于动态窗口法耗时减少8.7%,路径总长度减少8.98%。虽然传统人工势场法相较于动态窗口法减少了避障时间和总路径,但传统人工势场法由于势场作用使得无人机即使避开障碍物也会受到障碍物的斥力影响而做出不必要的偏移。本文中改进算法对无人机受斥力情况做出调整,加入无人机速度方向与无人机和障碍物间所形成连线的夹角是否垂直的判断条件,使得无人机避开障碍物后而不受障碍物斥力的作用,改进后的人工势场法总耗时18.82 s,路径总长度13.46 m,相比于传统人工势场法时间减少了7.38%,总路径减少了5.8%。由以上分析可得出:改进人工势场法的无人机总耗时和总路径都优于动态窗口法和传统人工势场法。
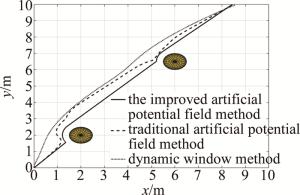
图 6 3种算法下无人机避障轨迹对比曲线
Figure 6. Comparison curve of UAV obstacle avoidance trajectory under three algorithms
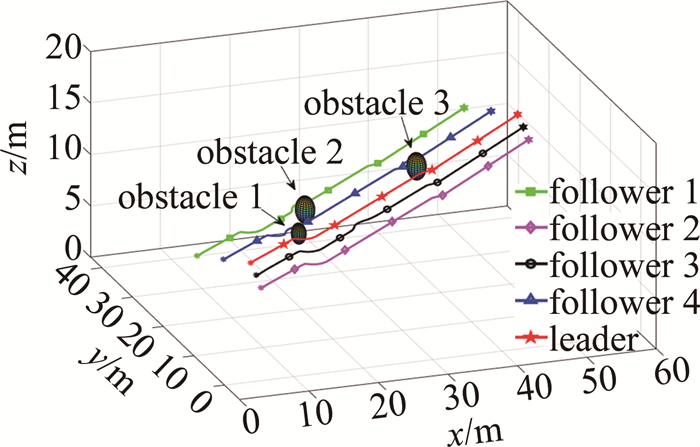
将改进后的算法应用到无人机编队中,以下仿真均采用改进后的避障算法对编队间的一致性进行分析。紫外光通信协作无人机防撞编队如图 7所示。由图 7看出, 5架无人机初始时刻就已形成“V”形编队,其余4架无人机跟随领航者共同向目标点飞行,星号为无人机编队的起点,六角形为无人机编队飞行终点。图中编队飞行时遇到障碍物时各自进行避障,避障完成后又快速恢复回原始队形直至到达目标点。

图 7 紫外光通信协作无人机防撞编队
Figure 7. Collision avoidance formation of UAVs in cooperation with ultraviolet communication
图 8是图 7的防撞编队轨迹放大。图 8a为对1号、2号障碍物的放大,图 8b为3号障碍物的放大。由图 8a可以看出,领航者无人机在检测到障碍物后开始进行避障,由于一致性其余4架无人机做出了与领航者相同的避让动作,1号无人机在航迹中检测到2号障碍物并进行避让,3号无人机由于编队拓扑关系的影响也作出相同的动作,由此可知,其它无人机的避障只会影响到与其存在拓扑关系的无人机,而不会影响到领航者航迹的变化。图 8b是编队在飞行一段时间后领航者对3号障碍物作出了避障动作,其余无人机动作也相应的变化,且5架无人机的避让动作仍以“V”形展开,说明编队在飞行时始终保持着编队队形。
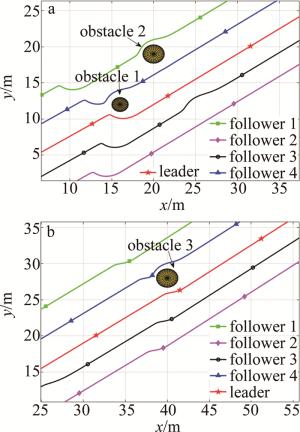
图 8 防撞编队轨迹放大图
Figure 8. Enlarged view of anti-collision formation trajectory
图 9为各无人机与领航者相对位置变化曲线,只反映其余4架无人机的避障情况。由图 9看出, 由于避障原因,航迹中存在障碍物的无人机与领航者的相对位置发生了变化,但变化幅度均在1 m以内,且避障后跟上原始队形的时间在20 s以内,说明无人机编队在避障后均能快速跟上编队并保持原始队形。
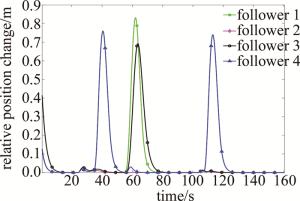
图 9 各无人机与领航者相对位置变化曲线
Figure 9. Relative position change curve of each drone and the navigator
为了近一步分析无人机避障编队的避障效果,将无人机编队的实际轨迹与无障碍物情况下的理想轨迹进行对比。其轨迹对比曲线和均方误差曲线如图 10、图 11所示。图 10中实线为无障碍物情况下编队的飞行轨迹,虚线为有3个障碍物情况下的飞行轨迹。由图 10可以看出, 编队的整体避障情况。由图 11可以看出, 所有无人机在单位时间内的均方误差均小于0.2,即编队避障精度较高。以上说明编队在避障过程中的避障轨迹与理想航迹的偏离程度较小,进一步降低了集群避障时的能量消耗。
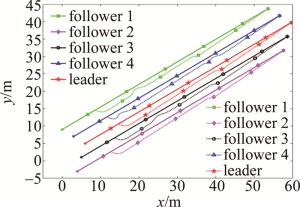
图 10 各无人机实际航迹与理想航迹对比曲线
Figure 10. Actual track and ideal track change curve of each UAV
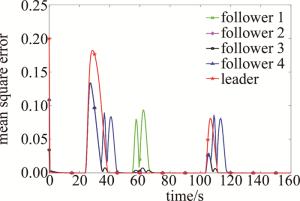
图 11 各无人机均方误差曲线
Figure 11. Mean square error curve of each UAV
为了体现无人机防撞控制编队的一致性,对无人机编队在x,y,z方向的速度曲线进行分析,如图 12所示。由于120 s以后5架无人机的速度趋于一致,所以只对前120 s进行分析。图中x和y方向的速度曲线变化明显,而z方向由于编队始终在同一平面飞行,所以速度变化一直为零。由图中看出, 编队在5 s左右时速度达到一致,在领航者避障时其它无人机速度与领航者保持一致,跟随领航者避障完成后其它无人机开始进行各自避障,但速度变化幅度均较小,说明编队一致性较好。
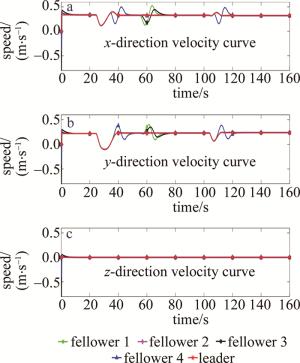
图 12 无人机飞行速度变化曲线
Figure 12. UAV flight speed change curve
-
将紫外光通信网络应用到无人机编队避障控制,给出了无人机编队的紫外光通信模型,分析了传统人工势场法出现避障路径过大的原因,通过在势场函数中加入判断无人机速度与障碍物连线是否垂直而优化了避障总路径,最后将改进的人工势场法与传统人工势场法和动态窗口法进行对比分析,仿真结果表明,改进的人工势场法不仅能到达目标点,而且在目标点和障碍物相同情况下的避障时间和总路径都优于其它两种算法。
另外,本文中将改进的人工势场法应用到无人机编队中,将一致性理论与改进的人工势场法相结合,使无人机编队在飞行过程中可以协同避障,并在多障碍物场景下仿真验证改进人工势场法的避障效果。仿真结果表明,无人机编队可以在多障碍物场景下避开所有的障碍物,并且编队内任一架无人机避障完成后可以迅速跟上原始队形到达目标点。
紫外光通信协作无人机防撞编队的控制方法
Control method for anti-collision formation of UAVs in cooperation with ultraviolet communication
-
摘要: 为了研究强电磁干扰环境下无人机防撞编队的避障控制效果, 采用无人机编队间紫外光通信模型, 对传统人工势场法进行改进, 给出了具体无人机编队机间和无人机与障碍物的势场函数, 实现无人机编队在飞行的同时可以进行局部避障。结果表明, 在相同条件下, 改进后的人工势场法比传统人工势场法的避障时间减少了7.38%, 避障总路径减少了5.8%, 将改进后的避障算法应用到编队中可实现无人机编队的机间避障与外部障碍物的规避, 且编队间能够保持固定队形飞行至目标点。这一结果对强电磁干扰环境下无人机编队避障的研究有一定的应用价值。Abstract: In order to study the obstacle avoidance control effect of unmanned aerial vehicle (UAV) anti-collision formation in the environment of strong electromagnetic interference, the ultraviolet light communication model between UAV formations was adopted, and the traditional artificial potential field method was improved. The potential field function of the UAV and the obstacle was established, with which the local obstacle avoidance while the UAV formation was flying was realized. The results show that with the improved artificial potential field method, the obstacle avoidance time reduces by 7.38% and the total obstacle avoidance path reduces by 5.8% compared with the traditional artificial potential field method under the same conditions. The improved obstacle avoidance algorithm is applied to the formation. It can realize the obstacle avoidance between the drones and the avoidance of external obstacles, the formation can maintain a fixed formation to fly to the target point. This result has certain application value for the research of UAV formation obstacle avoidance in strong electromagnetic interference environment.
-
图 6 3种算法下无人机避障轨迹对比曲线
Figure 6. Comparison curve of UAV obstacle avoidance trajectory under three algorithms
图 7 紫外光通信协作无人机防撞编队
Figure 7. Collision avoidance formation of UAVs in cooperation with ultraviolet communication
图 8 防撞编队轨迹放大图
a—1、2号障碍物放大 b—3号障碍物放大
Figure 8. Enlarged view of anti-collision formation trajectory
a—enlargement of obstacles 1 and 2 b—enlargement of obstacle 3
图 9 各无人机与领航者相对位置变化曲线
Figure 9. Relative position change curve of each drone and the navigator
图 10 各无人机实际航迹与理想航迹对比曲线
Figure 10. Actual track and ideal track change curve of each UAV
表 1 编队初始仿真参数
Table 1. Initial simulation parameters of formation
drone spatial location qi/m speed vi/(m·s-1) pitch angle ωi/(°) yaw angle φi/(°) UAV1 [0, 9, 10]T 0 0 0 UAV2 [4, -3, 10]T 0 0 45 UAV3 [5, 1, 10]T 0 0 -45 UAV4 [3, 7, 10]T 0 0 90 UAV5 [6, 5, 10]T 0 0 0  下载: 导出CSV
下载: 导出CSV
表 2 障碍物参数信息
Table 2. Obstacle parameter information
obstacle spatial location qo/m radius/m minimum range ‖qi, o‖min/m maximum range ‖qi, o‖max/m 1 [16, 12, 10]T 1 2 10 2 [20, 19, 10]T 1.3 2.6 13 3 [40, 28, 10]T 1.3 2.6 13
下载: 导出CSV
-
[1] ZHANG S, ZHANG H, DI B, et al. Cellular UAV-to-X communications: Design and optimization for multi-UAV networks[J]. IEEE Transactions on Wireless Communications, 2019, 18(2): 1346-1359. doi: 10.1109/TWC.2019.2892131 [2] CIRILLO F, GÓMEZ D, DIEZ L, et al. Smart city IoT services creation through large scale collaboration[J]. IEEE Internet of Things Journal, 2020, 7(6): 5267-5275. doi: 10.1109/JIOT.2020.2978770 [3] ALLADI T, BANSAL G, CHAMOLA V, et al. Secauthuav: A novel authentication scheme for uav-ground station and UAV-UAV communication[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 15068-15077. doi: 10.1109/TVT.2020.3033060 [4] WEN J, ZHAO G, HUANG S, et al. UAV three-dimensional formation keeping controller design[C]//2019 Chinese Automation Congress (CAC). New York, USA: IEEE, 2019: 4603-4608. [5] 徐博, 张大龙. 基于量子行为鸽群优化的无人机紧密编队控制[J]. 航空学报, 2020, 41(8): 313-324. XU B, ZHANG D L. Tight formation flight control of UAVS based on pigeon inspired algorithm optimization by quantum behavior[J]. Acta Aeronauticaet Astronautica Sinica, 2020, 41(8): 313-324(in Chinese). [6] 宗群, 王丹丹, 邵士凯, 等. 多无人机协同编队飞行控制研究现状及发展[J]. 哈尔滨工业大学学报, 2017, 49(3): 1-14. ZONG Q, WANG D D, SHAO Sh K, et al. Research status and development of multi UAV coordinated formation flight control[J]. Journal of Harbin Institute of Technology, 2017, 49(3): 1-14(in Chinese). [7] TIAN Y, ZHU X, MENG D, et al. An overall configuration planning method of continuum hyper-redundant manipulators based on improved artificial potential field method[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 4867-4874. doi: 10.1109/LRA.2021.3067310 [8] BATISTA J, SOUZA D, SILVA J, et al. Trajectory planning using artificial potential fields with metaheuristics[J]. IEEE Latin America Transactions, 2020, 18(5): 914-922. doi: 10.1109/TLA.2020.9082920 [9] YUAN J, ZHANG S, SUN Q, et al. Laser-based intersection-aware human following with a mobile robot in indoor environments[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 51(1): 354-369. [10] LIU Y, HUANG P, ZHANG F, et al. Distributed formation control using artificial potentials and neural network for constrained multiagent systems[J]. IEEE Transactions on Control Systems Technology, 2018, 28(2): 697-704. [11] ZHANG X, DUAN H. Altitude consensus based 3D flocking control for fixed-wing unmanned aerial vehicle swarm trajectory tracking[J]. Proceedings of the Institution of Mechanical Engineers, 2016, 230(14): 2628-2638. doi: 10.1177/0954410016629692 [12] LINDQVIST B, MANSOURI S S, AGHA-MOHAMMADI A, et al. Nonlinear MPC for collision avoidance and control of UAVs with dynamic obstacles[J]. IEEE Robotics and Automation Letters, 2020, 5(4): 6001-6008. doi: 10.1109/LRA.2020.3010730 [13] PARK J, CHO N, LEE S. Reactive collision avoidance algorithm for UAV using bounding tube against multiple moving obstacles[J]. IEEE Access, 2020, 8: 218131-218144. doi: 10.1109/ACCESS.2020.3042258 [14] 索文凯, 胡文刚, 班利明, 等. 基于视觉图像的四旋翼无人机飞行控制研究[J]. 激光技术, 2020, 44(4): 451-458. SUO W K, HU W G, BAN L M, et al. Research on flight control of quadrotor UAV based on visual image[J]. Laser Technology, 2020, 44(4): 451-458(in Chinese). [15] ZHAO T F, XIE Y, ZHANG Y. Connectivity properties for UAVs networks in wireless ultraviolet communication[J]. Photonic Network Communications, 2018, 35(3): 316-324. doi: 10.1007/s11107-017-0753-5 [16] 陈旿, 范铭楷, 李泽宏, 等. 蜂群无人机系统的网络鲁棒性设计[J]. 系统工程与电子技术, 2019, 41(11): 2633-2640. CHEN W, FAN M K, LI Z H, et al. Design of network robustness for drone swarm system[J]. Systems Engineering and Electronics, 2019, 41(11): 2633-2640(in Chinese). [17] LIN Y, WANG M, ZHOU X, et al. Dynamic spectrum interaction of UAV flight formation communication with priority: A deep reinforcement learning approach[J]. IEEE Transactions on Cognitive Communications and Networking, 2020, 6(3): 892-903. doi: 10.1109/TCCN.2020.2973376 [18] 朱旭, 闫茂德, 张昌利, 等. 基于改进人工势场的无人机编队防碰撞控制方法[J]. 哈尔滨工程大学学报, 2017, 38(6): 961-968. ZHU X, YAN M D, ZHANG Ch L, et al. UAV formation collision avoidance control method based on improved artificial potential field[J]. Journal of Harbin Engineering University, 2017, 38(6): 961-968(in Chinese). [19] WANG J, XIN M. Integrated optimal formation control of multiple unmanned aerial vehicles[J]. IEEE Transactions on Control Systems Technology, 2013, 21(5): 1731-1744. doi: 10.1109/TCST.2012.2218815 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 6648
- HTML全文浏览量: 4957
- PDF下载量: 22
- 被引次数: 0
