 网站地图
网站地图









-
资源卫星激光测距仪采用单波束发射、接收对应布局体制,其中发射机和接收机均采取主备份设计,主备份双通道通过分视场实现,主份和备份沿垂轨方向对称分布,夹角0.23°。激光发射机由激光器和扩束器组成,激光器发射2Hz, 1064nm, 170mJ的激光脉冲信号,扩束器扩束倍率2倍,发射机产生一个发散角100μrad的脉冲激光束,对应50.6km的地面光斑尺寸。接收机光学系统焦距1000mm,接收视场角550μrad,光学型式应用卡塞格林和中继光学组合系统,在中继光学的平行光路中放置1064nm±0.5nm的滤光片消除背景杂光影响。接收机视场光阑直径0.55mm,通过中继光学成像在直径0.8mm的雪崩光电二极管(avalanche photodiode,APD)上。系统如图 1所示。
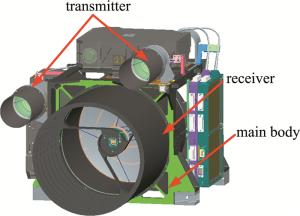
Figure 1. Laser altimeter of ZY-satellite
激光测距仪为了减小噪声、提高探测效率,激光发射机发散角和接收机视场角都很小。接收机捕获激光回波信号的条件是激光发射机光轴偏差小于接收机的视场[5]。影响回波信号接收的因素主要包括:卫星飞行延时[6],激光发射机回波弥散斑大小,激光发射机抖动以及装调和结构变形偏差。为了实现发射机光轴和接收机视轴的失调量小于接收机的视场角550μrad,各项误差分配如表 1所示。在地面装调测试过程中重点关注装调和结构变形偏差,其中装调偏差小于50μrad,失重偏差小于45μrad,热变形偏差小于80μrad。
表 1 The distribution of parallelism
item error/μrad receiver field of view 550.0 flight delay 48.0 transmitter jitter 15.0 laser echo spot transmitter divergency angle 100.0 receiver impact 50.0 atmosphere impact 43.6 deviation of alignment and structure deformation alignment deviation 50.0 alignment measurement accuracy 25.0 agravity effect 45.0 thermal effect 80.0 residual 44.5 -
常压下的测距仪收发平行度测试采用平行光管和多光轴测试装置[7]。激光发射机输出能量170mJ,发射机能量高,在光学面和结构面的散射光危害大,发射机能量的10-10量级的散射光超出APD的损伤阈值,需要防护APD。在常压环境下测试发射机光轴时,采用金属遮光罩遮挡接收机,保护APD探测器,接收机测试时移除遮光罩,通过分时测试的方式消除激光损伤APD探测器的风险。但在真空环境下,没有合适的方法安装和移除遮光罩,无法保护APD探测器。
-
国内外激光测距仪真空测试方法以比皮科伦坡水星探测器激光测距仪(the BepiColombo laser altimeter,BELA)为代表[8],激光测距仪放置在真空罐内,真空罐外放置测试装置,测试装置由发射机光轴测试装置、接收光轴测试装置、结构底板立方晶监视装置三部分组成。如图 2所示,发射和接收固定在一个零膨胀的底板上,限制接收和发射机随温度的相对位置变化,测试系统包含一个1064nm连续激光,通过分束器1分成两束,一束通过反射镜进入接收系统,通过反射镜的摆动测试接收系统的视轴;另一束来自准直底板上的立方晶,通过位置传感器监测底板变化量。激光发射机光轴测试系统由衰减片、分束器和两个电荷耦合器件(charge-coupled device,CCD)组成,通过测试立方晶,接收系统和发射机3个光轴之间的变化量,得出真空环境下的收发平行度等参量[9]。
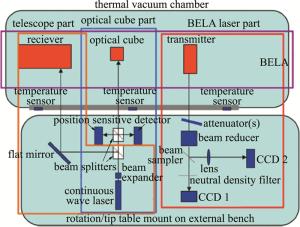
Figure 2. BELA vacuum test device
-
为了解决真空下APD的防护难题,借鉴现有国内外测试方法[10],提出了一种新的真空下激光性能测试方法,在接收机的APD焦面处设置模拟光纤匀光器,通过穿罐光纤将外置光源引入焦面,测试真空下激光发射机和接收机视轴偏差。此方法相对于现有方法的特点是结构紧凑,不需要额外的扫描机构[11],并且测试链路少、测试精度高, 解决了真空下不同工况的收发平行度测试难题。
真空测试系统如图 3所示。激光测距仪放置在包含平行光管的真空罐内[12],平行光管[13]口径600mm覆盖测距仪的全口径,在平行光管焦面光学窗口处安装激光光束分析仪,测试光轴偏差,数据分析系统通过穿舱电缆连接激光测距仪和光束分析仪。
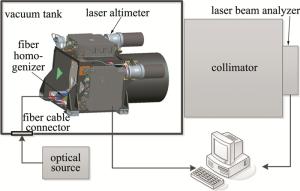
Figure 3. Vacuum test system of laser altimeter
为了解决真空环境下APD激光损伤风险,将测距仪APD焦面整体遮挡,在焦面处安装光纤匀光器, 均匀照明接收系统的视场光阑,在平行光管焦面获取接收视轴的光斑位置。光纤匀光器通过法兰盘上穿舱密封光缆连接器连接外部照明光源[14],照明光源波长1064nm,最大功率60mW。测距仪发出的激光束经过多级衰减汇聚在激光光束分析仪上,得到发射机的聚焦光斑位置,根据下面的公式计算光斑位置偏差对应的收发平行度偏差数据:
$ \theta_{x}=\arctan \left[\frac{d_{x}\left(x_{1}-x_{2}\right)}{f_{1}}\right] $
(1) $ \theta_{y}=\arctan \left[\frac{d_{y}\left(y_{1}-y_{2}\right)}{f_{1}}\right] $
(2) $ \theta=\sqrt{\theta_{x}^{2}+\theta_{y}^{2}} $
(3) 式中,x1和y1为激光发射机聚焦光斑在激光光束分析仪上的质心位置,x2和y2为接收机光阑在激光光束分析仪的像点质心位置,f1为平行光管焦距,θx和θy为激光发射机和接收机x和y方向的平行度偏差,dx和dy为激光光束分析仪x和y方向的像元尺寸,θ为收发平行度总体偏差。
接收机的焦面位置[15]设计一个光纤匀光器,照明接收视场,如图 4所示。光纤匀光器由光纤、反射镜和匀光片组成,光纤发出数值孔径为0.22的发散光束,经45°反射镜折转到匀光片上,匀光片产生发散的均匀分布的光束照明接收机的视场光阑,引出接收机的视轴。光纤芯径为200μm,反射镜直径为5mm,匀光片直径为5mm,整个光纤匀光器体积为20mm×20mm×18mm,适应测距仪焦面位置的狭小空间安装[16]。
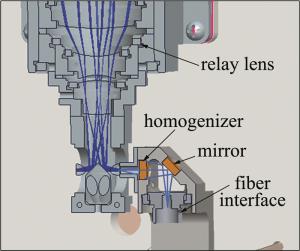
Figure 4. Diagram of fiber-optic homogenizer
-
收发平行度标定误差包括随机误差和系统误差两种。
随机误差包括激光发射机的指向抖动误差和能量分布误差,以δr表示,通过10次测量取平均值减小随机误差,测试结果表明,随机误差小于5μrad。
系统误差以δs表示,包括CCD的质心计算误差、衰减片引起的误差、平行光管定焦误差、CCD的焦面倾斜误差、平行光管波前引起的误差和激光光斑不均匀性对质心位置判断的影响等,具体为:(1)质心计算误差以δ1表示。对于激光发射器,CCD像元尺寸为9μm,使用12m焦距平行光管,根据质心算法精度,则激光发射器光轴对准精度优于0.07μrad;(2)衰减片引起的误差以δ2表示。发射系统加入50dB的衰减片,不同工况影响一致,测试相对变化量,此项误差可以忽略;(3)平行光管的定焦误差以δ3表示。平行光管焦距12m,采用五棱镜法定焦面误差为1.07mm,接收系统和激光发射机的间距534mm,此项对光轴对准带来的影响为3.99μrad;(4)CCD的焦面倾斜误差以δ4表示。多光轴标定系统焦面倾斜通过自准直调整,误差小于0.2°,整个焦面长度36mm,在整个长度范围内因焦面倾斜引起的光轴偏差为0.11μrad;(5)平行光管波前引起的误差以δ5表示。经ZEMAX软件仿真分析,平行光管的波前均方根小于0.1λ(λ=0.6328μm)时,对质心的影响小于0.97μrad;(6)激光光斑不均匀性对质心位置判断的影响以δ6表示。激光器的光斑近似近高斯分布,对质心计算的影响可以忽略。
综合以上误差项,系统的随机误差如下式所示:
$ \delta_{\mathrm{s}}=\sqrt{\delta_{1}^{2}+\delta_{2}^{2}+\delta_{3}^{2}+\delta_{4}^{2}+\delta_{5}^{2}+\delta_{6}^{2}} $
(4) 经计算, 随机误差为4.1μrad。
收发平行度标定误差以δ表示,包含系统误差和随机误差,如下式所示:
$ \delta=\sqrt{\delta_{\mathrm{r}}^{2}+\delta_{\mathrm{s}}^{2}} $
(5) 经计算, 收发平行度误差为6.47μrad。
图 5为测试误差分布图。
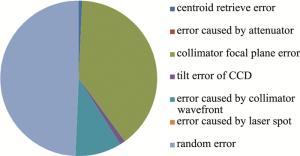
Figure 5. Distribution of test error
-
采用新的方法测试了激光发射机的光轴和发散角、接收机的视轴,以及系统的收发平行度,测试分为常压20℃、真空20℃、真空18℃和真空22℃ 4个工况,测试结果如图 6所示。图 6a为真空20℃工况下激光发射机在平行光管焦面的光斑分布,图 6b为真空20℃工况下接收机在平行光管焦面光斑分布。

Figure 6. Test result of vacuum experiment
测距仪发散角的测试结果如图 7所示。激光发射镜头进行了真空预置,常压下处于离焦状态,发散角达到了160μrad,属于正常现象。不同的真空热试验工况下,发散角均小于90μrad,满足发散角小于100μrad指标要求。
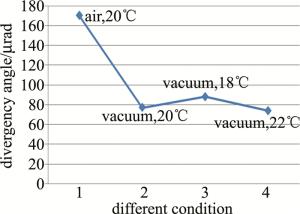
Figure 7. Test result of divergence angle
接收机的视场角测试结果如图 8所示。接收机为反射式光学系统,无真空预置。不同的真空热试验工况下,接收机视场角均大于550μrad,满足接收视场角大于550μrad指标要求。

Figure 8. Field of view result of receiver
根据发射机和接收机的光斑位置,用(2)式~(4)式计算收发平行度偏差,不同的真空热试验工况下的测试结果如表 2所示。最大偏差14.1μrad,收发平行度最大允许偏差80μrad,表明系统优于指标要求,不同工况的偏差分布如图 9所示。
表 2 Test result of parallelism
condition optical axis spot position in x-direction/mm spot position in y-direction/mm deviation in x-direction/μrad deviation in y-direction/μrad parallelism deviation/ μrad air, 20℃ receiver 7.240 5.047 3.39 -8.68 9.32 transmitter 7.281 4.943 vacuum, 20℃ receiver 7.604 5.775 transmitter 7.629 5.674 2.08 -8.44 8.69 vacuum, 18℃ receiver 7.324 5.859 transmitter 7.337 5.690 1.07 -14.06 14.10 vacuum, 22℃ receiver 5.938 4.165 3.35 3.93 5.16 transmitter 5.978 4.212 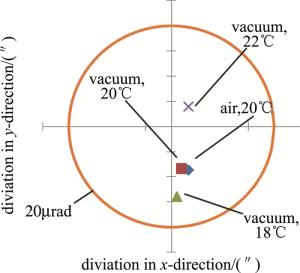
Figure 9. The distribution of parallelism
-
本文中针对高能激光损伤风险高,提出了一套适用于真空环境下收发平行度测试方法,通过设计一套穿罐光纤照明装置,实现了真空下接收机的视轴引出,避免了接收机APD探测器敏感元件的损伤风险。利用此方法测试了资源卫星激光测距仪真空不同热实验工况下的发散角和收发平行度等指标,测试结果表明,发散角小于90μrad,收发平行度偏差小于14.1μrad,满足指标要求。测距仪在轨性能良好,验证了本方法的正确性。本文中提供了一个有效的高能激光测距仪真空测试方法,完善了激光测距仪测试链路。
真空环境下激光测距仪收发光轴测试方法研究
Measurement method research of the receiver and transmitter axis of laser altimeter in vacuum environment
-
摘要: 为了避免资源卫星激光测距仪地面真空收发光轴一致性测试过程中损伤雪崩光电二极管(APD),采用一种新的适用于真空环境下测试方法,通过平行光管和激光光束分析仪建立测试系统,穿舱密封光缆连接器引入罐外的1064nm连续光源,在接收机焦面位置设计光纤匀光器,产生发散的均匀分布的照明光束,引出接收机视轴,多级衰减引出发射机光轴,对资源卫星激光测距仪真空下不同工况性能进行了实验验证。结果表明,此方法消除了真空环境下APD损伤风险,测量精度优于6.47μrad,满足激光测距仪的测试精度要求。该研究具有结构紧凑、测试链路少、测试精度高的优点,为高能激光测距仪真空测试提供了新思路,具有广泛的应用前景。Abstract: In order to avoid damage avalanche photodiode(APD)during the the receiver and transmitter axis testing process of ZY-satellite laser altimeter, a new test method suitable for vacuum environment was proposed. The test system was established through the collimator and laser beam analyzer, and the optical cable connector was sealed through the cabin, a 1064nm continuous light source outside the tank was connected to a designed fiber-optic homogenizer, which was fixed on the focal plane of receiver to produce a uniformly illumination beam and get the optical axis of the receiver. The optical axis of the transmitter was got by multi-stage attenuation. The results show that the method eliminates the risk of APD damage in vacuum environment, and the measure accuracy is better than 6.47μrad, which meets the requirements of laser altimeter. The method has the advantages of compact structure and high precision. It provided a new idea for vacuum test of high energy laser rangefinder and has a wide application prospects.
-
Key words:
- laser technique /
- altimeter /
- vacuum /
- parallelism /
- fiber-optic homogenizer
-
表 1 The distribution of parallelism
item error/μrad receiver field of view 550.0 flight delay 48.0 transmitter jitter 15.0 laser echo spot transmitter divergency angle 100.0 receiver impact 50.0 atmosphere impact 43.6 deviation of alignment and structure deformation alignment deviation 50.0 alignment measurement accuracy 25.0 agravity effect 45.0 thermal effect 80.0 residual 44.5  下载: 导出CSV
下载: 导出CSV
表 2 Test result of parallelism
condition optical axis spot position in x-direction/mm spot position in y-direction/mm deviation in x-direction/μrad deviation in y-direction/μrad parallelism deviation/ μrad air, 20℃ receiver 7.240 5.047 3.39 -8.68 9.32 transmitter 7.281 4.943 vacuum, 20℃ receiver 7.604 5.775 transmitter 7.629 5.674 2.08 -8.44 8.69 vacuum, 18℃ receiver 7.324 5.859 transmitter 7.337 5.690 1.07 -14.06 14.10 vacuum, 22℃ receiver 5.938 4.165 3.35 3.93 5.16 transmitter 5.978 4.212
下载: 导出CSV
-
[1] GAO H, LIU J M, YANG Ch, et al. Compact solid-state lasers with high peak power used for remote laser rangefinders[J]. Laser Technology, 2019, 43(5): 597-600(in Chinese). [2] LIU H X, ZHOU B, HE X. Dual stochastic detection process for APD receiving laser in turbulent atmosphere[J]. Laser Technology, 2019, 43(4): 471-475(in Chinese). [3] ABSHIRE J B, SUN X L, AFZAL R S, et al. Mars orbiter laser altimeter: Receiver model and performance analysis[J]. Applied Optics, 2000, 39(15): 2449-2460. doi: 10.1364/AO.39.002449 [4] IZQUIERDO L R, SCOUT V S, CONNELLY J, et al. Optical system design and integration of the lunar orbiter laser altimeter[J]. Applied optics, 2009, 48(16): 3035-3049. doi: 10.1364/AO.48.003035 [5] ZHANG H H, WANG J Y, SHU R, et al. Optical system integration of near infrared laser altimeter[J]. Proceedings of the SPIE, 2006, 6150: 61503. [6] YU A W, KRAINAK M A, HARDING A J, et al. Sixteen channel, non-scanning airborne lidar surface topography (list) simulator[J]. Proceedings of the SPIE, 2010, 7578: 757802. doi: 10.1117/12.843191 [7] DU G J, DONG X, MU Sh B. High accuracy alignment facility for the receiver and transmitter of laser altimeter[J]. Proceedings of the SPIE, 2018, 10846: 108461Q. [8] GOUMAN J, BECK T, AFFOLTER M. Measurement and stability of the pointing of the BepiColombo laser altimeter under thermal load[J]. Acta Astronautica, 2014, 105(28): 171-180. [9] JIN W Q, WANG X, ZHANG Q Y, et al. Technical progress and its analysis in detecting of multi-axes parallelism system[J]. Infrared and Laser Engineering, 2010, 39(3): 526-531 (in Chinese). [10] YU A W, MARIE A, GRADAC N, et al. The lunar orbiter laser altimeter (LOLA) laser transmitter[J]. Proceedings of the SPIE, 2008, 6871: 68710. [11] DING Zh Y, YE L, SHEN X H. Detection method of between laser and parallelism of optic axes visible optical systems[J]. Infrared and Laser Engineering, 2008, 37(5): 890-893 (in Chinese). [12] GAO M, HOU H L. Setup of reference optical axis for aiming deviation evaluation with multi-optical axis in field[J]. Acta Photonica Sinica, 2008, 37(5): 1029-1033 (in Chinese). [13] HE H H, YE L, ZHOU X Y. Theory and precision analysis of testing apparatus of parallel depth[J]. Opto-Electronic Engineering, 2007, 34(5): 52-56 (in Chinese). [14] DENG Y T, LI X, YAN F J. Attitude determination method and e-rror analysis of space-borne laser range finder[J]. Spacecraft Recovery & Remote Sensing, 2015, 36(3): 86-91 (in Chinese). [15] ZHAO X T, ZHANG Ch, JI Y. Distortion consistency correction technique for ultra-wide field of view off-axis optical system[J]. Journal of Applied Optics, 2020, 41(5): 1032-1036(in Chinese). doi: 10.5768/JAO202041.0503005 [16] YUAN L, QIU L R, KANG D K. Missile-borne measuring device of effective light intensity spatial distribution for pulsed light source[J]. Journal of Applied Optics, 2020, 41(4): 754-760(in Chin-ese). doi: 10.5768/JAO202041.0410001 [17] PAN W J, ZHANG Q Y, ZHANG Q. Identification method of aircraft wake vortex based on Doppler lidar[J]. Laser Technology, 2019, 43(2): 233-237(in Chinese). [18] HE Y H, ZHANG E H, WANG Zh H, et al. Analysis of incoherent beam combination effect of fiber lasers[J]. Laser Technology, 2019, 43(6): 829-833(in Chinese). [19] ZHANG D B, SONG Y H, WANG Q Sh, et al. Error analysis of laser divergence angle measurement[J]. Laser Technology, 2016, 40(6): 926-929 (in Chinese). [20] SHI Zh L, MENG W W, SHEN J Sh. Tracking design of APT system of laser wireless energy transmission for unmanned aerial vehicle[J]. Laser Technology, 2019, 43(6): 809-814(in Chinese). -

 点击查看大图
点击查看大图

图(9) / 表(2)
计量
- 文章访问数: 5459
- HTML全文浏览量: 4021
- PDF下载量: 26
- 被引次数: 0
