 网站地图
网站地图

 下载:
下载:






-
空间激光通信具有传输速率高、通信容量大、保密性好和抗干扰能力强等优点,这使其在民用和军事通信领域都得到了广泛的应用[1]。但是,由于激光具有较窄的发射光束以及较小的发散角,机载激光通信一般采用粗精复合轴的控制方法来保证通信终端的视轴稳定[2-3],而粗跟踪系统作为实现激光通信视轴稳定的第一步,其视轴稳定控制方法的选择就尤为重要。
机载激光通信的视轴稳定主要受以下两个方面的影响[4]:(1)载体运动产生的姿态变化以及平台的振动;(2)大气湍流等外界不确定因素影响。而采用比例-积分-微分(proportion-integral-derivative, PID)控制来实现视轴稳定,虽然具有算法简单、易于实现等优点,但是由于机载激光通信控制系统的数学模型不确定以及参量易于发生变化,PID控制无法对参量进行自整定,所以导致其控制性能较差[5-6]。模糊PID控制虽然非线性控制作用较好,但是自主学习能力较差,所以系统控制精度不高[7];神经网络具有较好地自主学习能力,但是非线性控制能力较差[8]。
因此,本文中设计的模糊神经网络PID控制器,利用模糊理论的逻辑推理与神经网络的自主学习能力[9],可以实时在线调整PID控制器的3个参量,以实现视轴的稳定控制。仿真实验结果表明,该控制器很好地克服了机载平台的外界扰动,实现了粗跟踪控制系统的参量自适应整定,提高了系统的控制精度。
-
本文中结合模糊控制与神经网络,设计的模糊神经网络PID控制器原理图如图 2所示[11-12]。在图 2中,系统处于第k个时刻,xin(k)为系统的输入、yout(k)为输出信号,位置误差e(k)和误差变化率ec(k)作为模糊神经网络控制器的输入变量,而u(k)作为该控制器的输出量。该控制器的特点是:利用模糊神经网络的模糊推理与自主学习能力,自适应整定PID控制器的3个参量Kp,Ki和Kd,直至输出PID控制器的最优控制参量[13-14]。
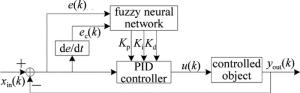
Figure 2. Schematic diagram of PID controller based on fuzzy neural network
-
模糊神经网络结构主要由输入层、隶属度函数生成层、模糊推理层、归一化层和输出层五部分组成[15-16],其模型如图 3所示。
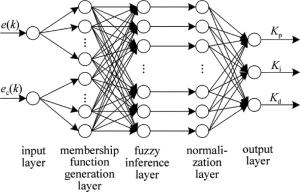
Figure 3. Block diagram of fuzzy neural network
(1) 输入层:由2个神经元作为输入量,且输入量x1,x2分别为系统的位置误差e(k)和误差变化率ec(k),该层通过函数f1(x)=x直接把输入量传至下一层,其输出为:
$ \left\{ \begin{align} &{{I}_{i}}\left( 1 \right)={{x}_{i}} \\ &{{O}_{i}}\left( 1 \right)={{f}_{i}}\left( {{I}_{i}}\left( 1 \right) \right)={{I}_{i}}\left( 1 \right)={{x}_{i}} \\ \end{align} \right. $
(1) 式中,Ii(1)和Oi(1)分别为第1层的第i个神经元的输入量与输出量。
(2) 隶属度函数生成层:该层将两个输入函数x1与x2均分成7个模糊集,即{Nb,Nm,Ns,Z,Ps,Pm,Pb},分别代表{负大,负中,负小,零,正小,正中,正大}。第i个输入量的第j个模糊集(i=1, 2;j=1, 2,…, 7)记为Aij(xi),将隶属度函数选为高斯函数,且作用函数为f2(x)=x,则可得到隶属度函数Aij(xi)的值为:
$ \left\{ \begin{align} &{{I}_{ij}}\left( 2 \right)={{A}_{ij}}({{x}_{i}})=\exp \left[ -\frac{{{O}_{i}}\left( 1 \right)-{{a}_{ij}}}{{{b}_{ij}}^{2}} \right] \\ &{{O}_{ij}}\left( 2 \right)={{f}_{2}}({{I}_{ij}}\left( 2 \right))={{I}_{ij}}\left( 2 \right)=\exp \left[ -\frac{{{O}_{i}}\left( 1 \right)-{{a}_{ij}}}{{{b}_{ij}}^{2}} \right] \\ &\left( i=1, 2;j=1, 2, \cdots , 7 \right) \\ \end{align} \right., $
(2) 式中,Iij(2)和Oij(2)分别表示第2层的第i个神经元、第j个模糊集的输入量与输出量,aij与bij分别为第i个输入量和第j个隶属度函数对应的均值和标准差。
(3) 模糊推理层:该层借助与第2层的连接对模糊规则进行匹配,实现每个节点间的模糊推理运算,得到每条规则的适应度。且该层的作用函数为f3(x)=x,则:
$ \left\{ \begin{align} &{{I}_{p}}\left( 3 \right)={{A}_{1m}}\cdot {{A}_{2n}} \\ &{{O}_{p}}\left( 3 \right)={{f}_{3}}\left( {{I}_{p}}\left( 3 \right) \right)={{A}_{1m}}\cdot {{A}_{2n}} ~~~,\\ &\ \ \ (m, n=1, 2, \cdots , 7;p=1, 2, \cdots , 49) \\ \end{align} \right. $
(3) 式中,Ip(3)和Op(3)分别为第3层的第p个神经元的输入量与输出量,A1m为第1个输入量的第m个模糊集,A2n为第2个输入量的第n个模糊集。
(4) 归一化层:该层实现对模糊推理层的输出值进行归一化计算,则:
$ {{O}_{p}}\left( 4 \right)=\frac{{{O}_{p}}\left( 3 \right)}{\sum\limits_{p=1}^{49}{{{O}_{p}}\left( 3 \right)}} $
(4) 式中,Op(4)为第4层的第p个神经元的输出量。
(5) 输出层:该层进行反模糊化计算,得到PID控制器的最优控制参量,其输出值为:
$ {{O}_{k}}\left( 5 \right)=\sum\limits_{p=1}^{49}{{{\omega }_{kp}}}{{O}_{p}}\left( 4 \right), (k=1, 2, 3) $
(5) 式中,Ok(5)为第5层的第k个控制参量的输出值,ωkp是归一化层与输出层之间的可调权系数。
本文中PID控制器采用增量式,则其控制输出为:
$ \left\{ \begin{align} &\Delta u\text{ }\left( k \right)={{K}_{\text{p}}}{{x}_{\text{c}}}\left( 1 \right)+{{K}_{\text{i}}}{{x}_{\text{c}}}\left( 2 \right)+{{K}_{\text{d}}}{{x}_{\text{c}}}(3) \\ &u\text{ }\left( k \right)=u\text{ }\left( k-1 \right)+\Delta u\text{ }\left( k \right) \\ &{{x}_{\text{c}}}(1)=e\text{ }\left( k \right) \\ &{{x}_{\text{c}}}(2)=e\text{ }\left( k \right)-e\text{ }\left( k-1 \right) \\ &{{x}_{\text{c}}}\left( 3 \right)=e\text{ }\left( k \right)-2e\text{ }\left( k-1 \right)+e\text{ }(k-2) \\ \end{align} \right. $
(6) 式中,e(k)为系统期望值与实际值的差值,Kp=O1(5),Ki=O2(5),Kd=O3(5)。
-
模糊神经网络学习算法的参量主要是将权值、隶属度函数的均值aij与隶属度函数的标准差bij连接起来。若系统处于第k个时刻,xin(k)为系统的期望输出值,yout(k)为实际输出值,则可定义误差函数为:
$ E\left( k \right)=\frac{1}{2}{{[{{x}_{\text{in}}}(k)-{{y}_{\text{out}}}(k)]}^{2}} $
(7) 所以,模糊神经网络的最优权值与参量的表达式为:
$ \begin{gathered} \left\{ \begin{gathered} {a_{ij}}\left( {{k_0} + 1} \right) = {a_{ij}}\left( {{k_0}} \right) - \eta \frac{{\partial E}}{{\partial {a_{ij}}}} + \hfill \\ \;\;\;\alpha \left[ {{a_{ij}}\left( {{k_0}} \right) - {a_{ij}}\left( {{k_0} - 1} \right)} \right] \hfill \\ {b_{ij}}\left( {{k_0} + 1} \right) = {b_{ij}}\left( {{k_0}} \right) - \eta \frac{{\partial E}}{{\partial {b_{ij}}}} + \hfill \\ \;\;\alpha \left[ {{b_{ij}}\left( {{k_0}} \right) - {b_{ij}}\left( {{k_0} - 1} \right)} \right] \hfill \\ {\omega _{kp}}\left( {{k_0} + 1} \right) = {\omega _{kp}}\left( {{k_0}} \right) - \eta \frac{{\partial E}}{{\partial {\omega _{kp}}}} + \hfill \\ \;\;\alpha \left[ {{\omega _{kp}}\left( {{k_0}} \right) - {\omega _{kp}}\left( {{k_0} - 1} \right)} \right], \hfill \\ \end{gathered} \right. \hfill \\ (i = 1,2;j = 1,2, \cdots ,7; \hfill \\ {k_0} = 1,2,3;p = 1,2, \cdots ,49) \hfill \\ \end{gathered} $
(8) 式中,k0为神经网络迭代步数;η为学习速率;α为网络学习动量因子。
-
实验取系统的扰动项为d(t)=βθ(k),t表示连续时间,且随机数β的均方差为0.4,均值为2、均方差为0.1的不确项θ(k)服从正态分布,取η=0.2,α=0.02。则在同种实验条件下,可得到传统PID控制器和模糊神经网络PID控制器的系统单位阶跃响应,如图 4所示。

Figure 4. Step response comparison betweem two controllers
由图 4可知,传统PID控制系统进入稳态的时间为1.9s,最大超调量为26%,而模糊神经网络PID控制系统只需要0.07s即可进入稳态,且基本无超调。以上数据表明,模糊神经网络PID控制器比PID控制器具有较快的响应速度、较小的超调量。
以阶跃响应实验为基础,设置条件1:载体以幅值为4°、频率为5Hz的周期性正弦规律进行运动,且不改变d(t),图 5为该条件下的位置跟踪误差图。设置条件2:载体幅值变为8°、频率仍为5Hz,但扰动项d(t)增加1倍,且不确项θ(k)的均方差变为0.3,其它参量与条件1相同,图 6为该条件下的位置跟踪误差图。

Figure 5. Position tracking error under condition 1

Figure 6. Position tracking error under condition 2
由图 5可知,条件1下两种控制器的位置跟踪精度分别为0.51mrad和0.19mrad,则说明模糊神经网络PID控制器比PID控制器具有更高的视轴稳定控制精度。由图 6可知,条件2下两种控制器的位置跟踪精度分别变为0.82mrad和0.21mrad,所以模糊神经网络PID控制器的视轴稳定控制精度变化较小。综合条件1和条件2可得到,当环境改变时,模糊神经网络PID控制器与传统PID控制器相比具有更强的自适应能力与鲁棒性。
由图 7可知,模糊神经网络PID控制器的3个参量变动范围较小,自适应调整时间也较短,表明该控制算法当系统的参量改变时具有较快的动态响应速度。
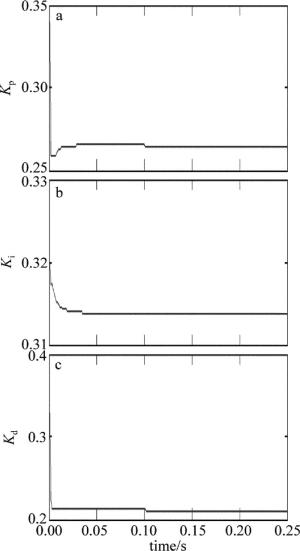
Figure 7. Parameters of PID controller based on fuzzy neural network
-
将模糊控制与神经网络相结合,设计了一种基于模糊神经网络的PID控制器,对PID控制器的3个参量进行实时在线调整,直至输出PID控制器的最优控制参量。仿真实验结果表明,采用模糊神经网络PID控制方法克服了粗跟踪系统受到扰动与参量改变时对视轴稳定的不利影响,具有较强的自适应性和鲁棒性。
机载激光通信的模糊神经网络PID视轴稳定控制
PID control of optical axis stabilization for airborne laser communication based on fuzzy neural network
-
摘要: 机载激光通信的视轴稳定是建立激光通信链路的前提。为了有效地克服载体扰动与参量改变对粗跟踪系统视轴稳定的不利影响,设计了一种基于模糊神经网络的比例-积分-微分(PID)控制方法。该方法结合模糊理论的非线性控制能力与神经网络的自主学习能力,实现了对PID参量的实时在线调整。结果表明,与传统PID控制方法相比,模糊神经网络PID控制方法提高了系统的动态响应速度,减小了系统超调量,当载体受到扰动与参量改变时,具有较强的自适应性和鲁棒性。
-
关键词:
- 光通信 /
- 机载激光通信 /
- 模糊神经网络 /
- 视轴稳定 /
- 比例-积分-微分控制
Abstract: For airborne laser communication, optical axis stabilization is the premise to establish laser communication link. In order to overcome the negative effect of carrier disturbance and parameters change on optical axis stabilization of coarse tracking system effectively, a proportion-integral-derivative(PID) control algorithm based on fuzzy neural network was designed. The algorithm combines the nonlinear controllability of fuzzy theory with self-learning ability of the neural network, and can achieve the real-time online adjustment of PID parameters. The simulation experiment results show that compared with the traditional PID control method, the fuzzy neural network PID control method can improve dynamic response speed and reduce the overshoot of a system and that the system has strong adaptability and robustness when the carrier is disturbed and the parameters change. -
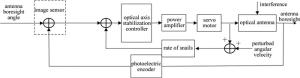
Figure 1. Block diagram of coarse tracking optical axis stabilization for airborne laser communication
-
[1] TONG S F, JIANG H L, LIU Y Q. Optimum design of bandwidth for the APT coarse tracking assembly in free space laser communication[J].Opto-Electronic Engineering, 2007, 34(9):16-20(in Chinese). [2] SONG Y S, TONG S F, JIANG H L, et al. Variable structure control technology of the fine tracking assembly in airborne laser communication system[J]. Infrared and Laser Engineering, 2010, 39(5): 934-938(in Chinese). [3] LI M, AI Y, CAO Y. Research of fine tracking servo system for FSO terminal[J]. Laser Technology, 2009, 33(3): 262-265(in Chinese). [4] CAO Y. Self-adjusting fuzzy variable structure control of optical axis stabilization for airborne laser communication[J]. Infrared and Laser Engineering, 2014, 43(10): 3373-3377(in Chinese). [5] SHAN W T, CHEN X A, HE Y, et al. Application of immune genetic algorithm based fuzzy RBF neural network in high-speed motorized spindles[J]. Journal of Mechanical Engineering, 2013, 49(23): 167-173(in Chinese). doi: 10.3901/JME.2013.23.167 [6] SUN Y K, ZHANG Y, HUANG Y H, et al. Application of dynamic recursive fuzzy neural network based on immune genetic algorithm to fermentation process[J]. Information and Control, 2011, 40(1): 110-115(in Chinese). [7] WANG T H, LI Y, WANG F. Study of PID controller to servo system base on fuzzy-neural network[J]. Fire Control & Command Control, 2014, 39(4): 153-156(in Chinese). [8] ZHANG Y, ZHOU C X. Application of improved fuzzy neural network PID controller in brushless DC motor control[J]. Computer Simulation, 2012, 29(5): 77-80(in Chinese). [9] LI J Q, YU L. Using BP neural networks for the simulation of energy consumption[C]//2014 IEEE International Conference on Systems, Man and Cybernetics.New York, USA: IEEE, 2014: 3542-3547. [10] CAO Y. Self-adjusting fuzzy variable structure control of optical axis stabilization for airborne laser communication[J].Infrared and Laser Engineering, 2014, 43(10): 3373-3377(in Chinese). [11] HE J, WEN J G, HOU W. Control and simulation of servo based on fuzzy neural network PID algorithm[J]. Journal of North University of China(Natural Science Edition), 2016, 37(2): 150-156(in Chinese). [12] WANG M H, LIANG YY. Fuzzy-PI controller for direct torque control drive system of SRM[J]. Electric Drive, 2010, 40(1): 51-54(in Chinese). [13] CAO X Q, ZHU J G, TANG R Y. Permanent magnet synchronous motor vector control system based on fuzzy radial basis function neural network[J]. Proceedings of The Csee, 2006, 26(1): 137-141(in Chinese). [14] CUI S M, ZHAO M R, SONG L, et al. Infrared image edge extraction based on fuzzy neural network[J]. Laser & Infrared, 2012, 42(9): 1063-1067(in Chinese). [15] DANG M H, GUO L. Research on PID PMLSM control algorithm based on fuzzy neural network[J].Journal of Zhejiang Sci-Tech University(Natural Sciences Edition), 2016, 35(1):52-57(in Chinese). [16] ZHANG M F, CAI J W. Application of fuzzy RBF neural network PID algorithm in DVD pick-up head control[J].Laser Journal, 2015, 36(6): 108-110(in Chinese). -

 点击查看大图
点击查看大图

图(7)
计量
- 文章访问数: 3427
- HTML全文浏览量: 1842
- PDF下载量: 194
- 被引次数: 0
