 网站地图
网站地图












-
光电跟踪系统(electro-optical tracking system, ETS)是一种高精度定向跟踪系统,可用于实时跟踪运动目标,在海陆空等领域已得到广泛应用[1]。精密控制技术是ETS中最为核心的技术,是实现高精度跟踪性能的保证[2-4]。但是复杂的工作环境使得ETS难免受到一些干扰因素的影响,传统的控制方法处理这些干扰问题的能力有限,基于现代控制理论的发展,学者们使用现代控制方法针对ETS的高精度跟踪问题进行了一些研究[5-7]。
在这些现代控制方法中,滑模控制(sliding mode control, SMC)对系统内部参数摄动及外界扰动不敏感,具有较强的抗扰能力,同时,其物理实现较为简单[8-9]。然而,传统SMC的控制律中存在不连续切换项,在控制过程中会造成抖振现象,这一定程度上限制了其在ETS中的应用[10]。
为了解决SMC的抖振问题,国内外学者已经进行了许多研究[11-16]。模糊控制(fuzzy logic control,FLC)作为一种智能控制算法,实现较为简单,其通过专家或操作者经验来设计模糊规则,从而达到自适应调整SMC切换项参数的目的,可以有效解决SMC的抖振问题。1型模糊控制(type-1 fuzzy logic control, T1FLC)是最常使用的FLC,然而,当系统工作环境复杂导致系统面临的不确定因素增加时,T1FLC处理这些不确定性的能力比较有限。作为对T1FLC的扩展,2型模糊控制(type-2 fuzzy logic control, T2FLC)[17]更适合高不确定性场景下的应用,相比于广义2型模糊控制(general type-2 fuzzy logic control, GT2FLC),区间2型模糊控制(interval type-2 fuzzy logic control, IT2FLC)因其计算简便而被广泛应用[18]。
本文中采用SMC算法来进行ETS控制器的设计,为了解决SMC的抖振问题,进一步提高运动平台下ETS的跟踪精度,首先提出了T1FLC方法来自适应调整SMC的切换增益,其次为了更好地处理系统中复杂的不确定性进而提升系统跟踪性能,在T1FLC的基础上提出使用IT2FLC来调整SMC的切换增益,并通过仿真和实验对比验证所提方法的优势。
-
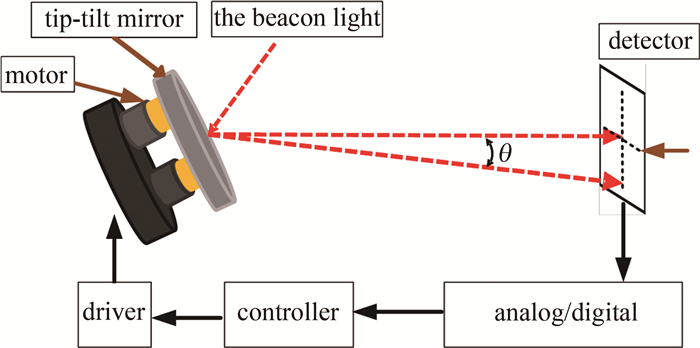
复合轴ETS具有动态跟踪范围大、跟踪精度高、响应速度快的特点,而快速反射镜(fast steering mirror, FSM)跟踪系统是其最重要技术之一[19-21],基于FSM的ETS如图 1所示。
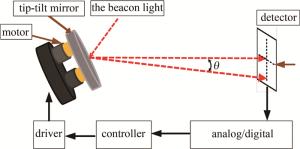
图 1 ETS原理图
Figure 1. Schematic of ETS
2阶被控对象位置开环模型可以描述为:
$ \ddot{\theta}(t)+b \dot{\theta}(t)+a \theta(t)=k u(t) $
(1) 式中,t表示采样时间;θ(t)表示角位移;$\dot{\theta}(t)$表示角速度;$\ddot{\theta}(t)$表示角加速度;u(t)为控制量;a,b和k是模型系数。
令x1=θ(t),x2=$\dot{\theta}(t)$,系统控制量u*=u(t),若考虑系统参数不确定性及外界扰动,则系统状态方程可以表示为[10]:
$ \left\{\begin{array}{l} \dot{x}_1=x_2 \\ \dot{x}_2=-a x_2-b x_1+k\left(u^*+d_{\mathrm{eq}}\right) \\ y=x_1 \end{array}\right. $
(2) 式中, deq=dex+k-1(δkdex+δku*-δax2-δbx1)表示系统受到的总扰动,δa, δb, δk分别表示参数的不确定性,dex表示系统受到的外界扰动,y表示实际输出信号。
-
采用积分滑模面以及基于指数趋近率的滑模控制器的设计思想[10],设计系统(见(2)式)的滑模控制率为:
$ \begin{gathered} u_{\mathrm{c}}=k^{-1}\left[\ddot{r}+a x_2+b x_1+\alpha \dot{e}+\right. \\ \left.\beta e+k_{\mathrm{c}} \sigma_{\mathrm{c}}+\eta \operatorname{sgn}\left(\sigma_{\mathrm{c}}\right)\right] \end{gathered} $
(3) 式中,r表示参考给定信号,$\ddot{r}$是其2阶导数,α, β为滑模面参数,e=r-y定义为系统跟踪误差,$\dot{e} $是其1阶导数, kc>0为指数收敛率,η>0为滑模面切换增益,σc表示采用的积分滑模面形式。
为了满足所设计的滑模面的到达条件及抑制扰动,η需设计成大于kdeq,但当外部扰动幅值较小时,由于sgn(·)为符号函数,η过度大于kdeq,此时不连续切换会导致严重的抖振。
-
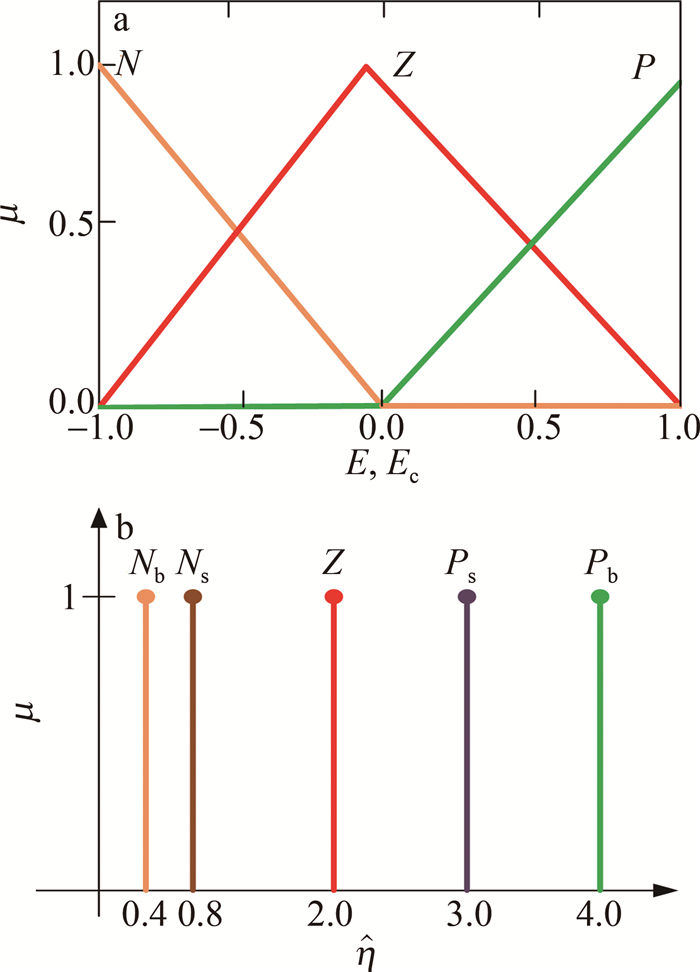
为了解决上述提到的SMC的抖振问题,提出了FLC方法。1型模糊系统[17](type-1 fuzzy logic system, T1FLS)主要由模糊化、模糊推理、知识库、清晰化4个部分组成。在本文作者所设计的模糊系统(fuzzy logic system, FLS)中,系统误差e和其导数${\dot e}$为FLS的两个输入量, 且分别定义为模糊论域上E和Ec两个模糊变量,自适应滑模面切换增益$\hat{\eta}$为FLS的输出,其中E和Ec定义为模糊论域上的3个模糊集合{N, Z, P}, $\hat{\eta}$定义为模糊论域上的5个模糊集合{Nb, Ns, Z, Ps, Pb}。图 2a、图 2b所示分别为本文作者设计的T1FLS的输入变量和输出变量的隶属函数(membership functions, MF)μ图。由图 2可知,本文作者设计的两输入单输出的FLS总共有9条模糊规则,其中第i条模糊规则表示形式为:
$ R_i: \hat{\eta}=\gamma_i, \left(E=M_i, E_{\mathrm{c}}=N_i\right) $
(4) 
图 2 T1FLS中输入输出变量的隶属函数
Figure 2. MFs of input and output variables in T1FLS
式中,Mi和Ni表示第i条规则的前件模糊集,γi表示后件模糊集。模糊规则见表 1。
表 1 系统的Takagi-Sugeno模糊规则
Table 1. Takagi-Sugeno fuzzy rules of the system
rules E N Z P Ec N Pb Ns Z Z Ps Nb Ps P Z Ns Pb -
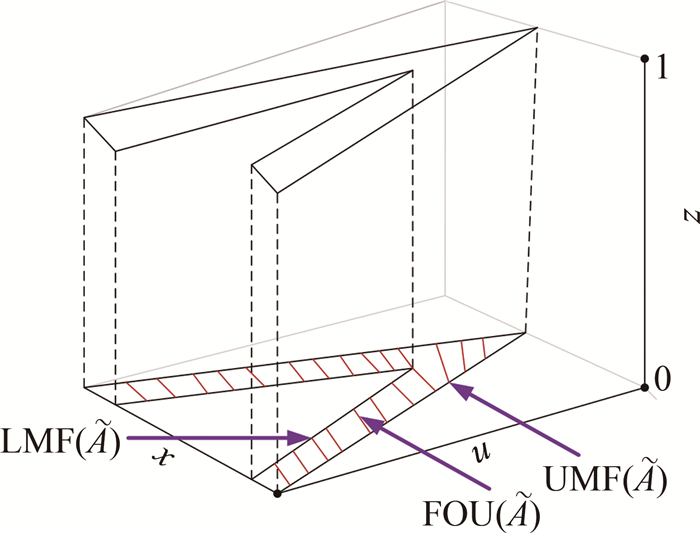
如果一个FLS中使用了至少一个图 3所示的区间2型模糊集合(interval type-2 fuzzy set, IT2FS)$\tilde{A}$,其表达形式见(5)式,则该FLS就称为区间2型模糊系统[17](interval type-2 fuzzy logic control system, IT2FLS),其中x表示论域X上的输入,u和z分别表示主隶属函数度和次隶属函数度,不确定域(footprint of uncertainty, FOU)包含上隶属函数(upper membership function, UMF)和下隶属函数(lower membership function, LMF)。与T1FLS相比,IT2FLS结构中增加了一个将IT2FS降型为1型模糊集的降型器。图 4为本文作者设计的IT2FLS的输入变量的隶属函数图。不同于图 2a,其输入隶属函数对应的模糊集合是IT2FS。IT2FLS的输出隶属函数与图 2b相同。图 4中, A, B, C为控制器的参数变量。
$ \tilde{A}=\int_{x \in X}\left[\int_{u \in[0, 1]} \frac{1}{u}\right] / x $
(5) 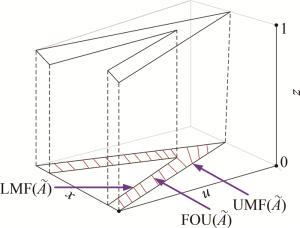
图 3 模糊系统中的区间2型模糊集合
Figure 3. IT2FS in fuzzy system
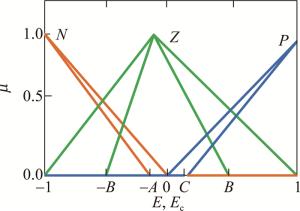
图 4 IT2FLS中输入变量的隶属函数
Figure 4. MFs of input variable in IT2FLS
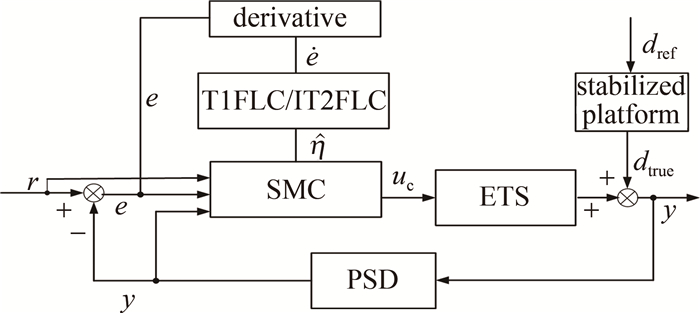
基于以上分析和设计,所提出的基于1型模糊滑模控制(type-1 fuzzy sliding mode control, T1FSMC)和区间2型模糊滑模控制(interval type-2 fuzzy sliding mode control, IT2FSMC)的ETS控制框图如图 5所示。图 5中, dref表示加入的扰动的参考幅值,dtrue表示实验过程中经过扰动平台后作用到系统中的实际的扰动幅值, PSD是位置传感器(position sensitive detector)。采用FLC和SMC相结合的方法后,控制律(见(3)式)的滑模面切换增益会自适应变化,则最终的控制律为:
$ \begin{gathered} u_{\mathrm{c}}=k^{-1}\left[\ddot{r}+a x_2+b x_1+\alpha \dot{e}+\right. \\ \left.\beta e+k_{\mathrm{c}} \sigma_{\mathrm{c}}+\hat{\eta} \operatorname{sgn}\left(\sigma_{\mathrm{c}}\right)\right] \end{gathered} $
(6) 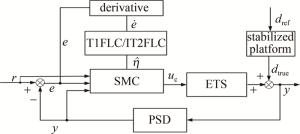
图 5 IT2FSMC/T1FSMC控制结构
Figure 5. Control structure of IT2FSMC/T1FSMC
-
图 6所示为本文中进行实验的跟踪-稳定平台。跟踪平台被安置在稳定平台上,这两个平台都由音圈电机驱动,位于稳定平台下的电涡流传感器和位于跟踪平台上的激光灯分别用于测量外部扰动及模拟信标光,反射镜偏转方向通过4个电机控制来控制光束偏转角度,从而将信标光反射到PSD,PSD对误差信号进行检测并传到控制器中。所有的实验机构和传感器均工作在5 kHz采样频率下。本实验平台的控制任务是使信标光稳定在目标探测器的几何中心。
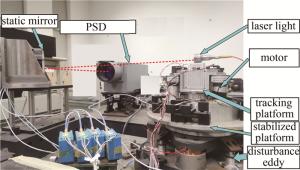
图 6 实验装置
Figure 6. Experimental apparatus
系统对象特性变化前通过正弦扫频获得FSM系统位置开环的Bode图如图 7a所示,经过拟合得到位置开环传递函数为:
$ G_{\mathrm{m}}(s)=\frac{1768.652}{s^2+25.95 s+1374.244} $
(7) 
图 7 实验平台伯德图
Figure 7. Bode diagram of experimental platform
式中, s=jω表示一个复数,ω表示频率。系统对象特性变化后通过正弦扫频获得FSM系统位置开环的Bode图如图 7b所示,经过拟合得到引入不确定性后的位置开环传递函数为:
$ G_{\mathrm{m}}(s)=\frac{1188.5214}{s^2+19.7041 s+1238.0431} $
(8) -
粒子群优化算法[22](particle swarm optimization,PSO)被用来优化获得控制器参数,从而保证控制器参数相对更优。“粒子”被视作PSO中每个待优化问题的解,它们有一定的位置和速度,通过迭代可找到待寻优问题的最优解。
时间乘绝对误差积分准则是控制系统中较为常用的目标函数(integrated time and absolute error,ITAE):
$ J_{\mathrm{ITAE}}=\int_0^{\infty} t|e(t)| \mathrm{d} t $
(9) 控制系统的动稳态性能可由(9)式来综合评价。ITAE值越小,性能就越好[23],所以本文中采用ITAE作为优化的目标函数。
PSO优化的最大迭代次数、种群规模分别被设置为100和30,SMC控制优化结果如表 2中第1行的4个参数所示。仿真和实验中所用的控制器参数均在表 2中列出。其中ke和kec分别表示FLS的两个输入量(误差e和误差变化$\dot{e} $)的量化因子。
表 2 控制器参数
Table 2. Parameters of controllers
controllers parameters SMC α=103.8131,β=1.4901,kc=8, η=1.8000k T1SMC α=103.8131,β=1.4901,kc=8, ke=1.25,kec=0.1 IT2FSMC α=103.8131,β=1.4901,kc=8, ke=1.25, kec=0.1, A=0.1, B=0.5,C=0.1 -
本节中利用MATLAB/simulink进行仿真,首先对比阶跃信号跟踪下3种控制方法的扰动抑制和参数不确定性处理能力及控制器产生的抖振情况,其次对比正弦信号跟踪下3种控制方法在抑制扰动和参数不确定性时的跟踪误差。
系统存在外部干扰dex=2sintε(t-3)+ε(t-5)(其中ε(·)表示单位阶跃函数)时,在参数不确定性δa=sin(t-2)、δb=15sin(t-2)和δk=20×sin(t-2)情况下,给定阶跃信号的位置响应、控制输入及跟踪误差的仿真结果如图 8和图 9所示。从图 8a、图 9a中可以看出,3种控制方法的动态响应性能相同,这是因为参数η不决定控制器的动态响应速度。从图 8b、图 8c和图 9b、图 9c中可以看出,在扰动幅值和切换增益匹配时,扰动刚好被抑制,此时无抖振产生;而在扰动或不确定性较小的时段,扰动可以完全被抑制,但SMC切换项增益大于扰动幅值,从而会产生抖振;在扰动或不确定性较大的时段,SMC的切换增益值不足以抑制扰动和不确定性,这时不产生抖振,但是却会产生比较突出的跟踪误差。而T1FSMC和IT2FSMC可以根据扰动给系统带来的误差情况自适应调整SMC的切换增益,所以从图中可以看到,这两种控制方法都能在提高系统跟踪性能的同时降低SMC抖振,其中IT2FSMC处理抖振的能力及跟踪性能相对更优。
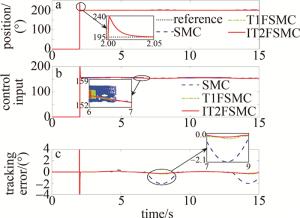
图 8 扰动抑制效果
Figure 8. Effect of disturbance suppression
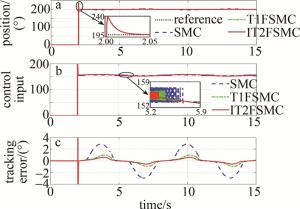
图 9 不确定性抑制效果
Figure 9. Effect of uncertainty suppression
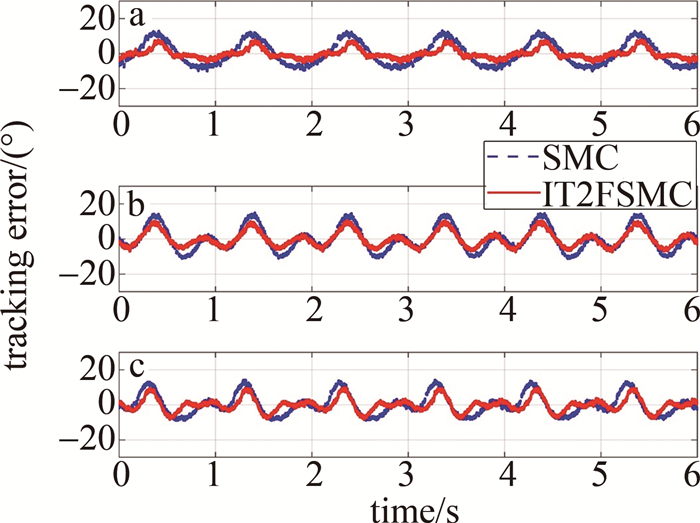
图 10、图 11分别为系统存在外部干扰dex=2sint×ε(t-3)+ε(t-5)和参数不确定性δa=sin(t-2)、δb=15sin(t-2)、δk=20sin(t-2)情况下,给定正弦信号的跟踪误差图。其中图 10和图 11所示给定正弦信号频率分别为1 Hz、2 Hz、3 Hz、4 Hz,幅值为200。从图 10、图 11中都可以看出,T1FSMC和IT2FSMC方法明显具有比SMC方法更小的误差波动,相比之下,IT2FSMC误差更小,这说明在3种控制方法中,IT2FSMC处理扰动和不确定性的能力最强。
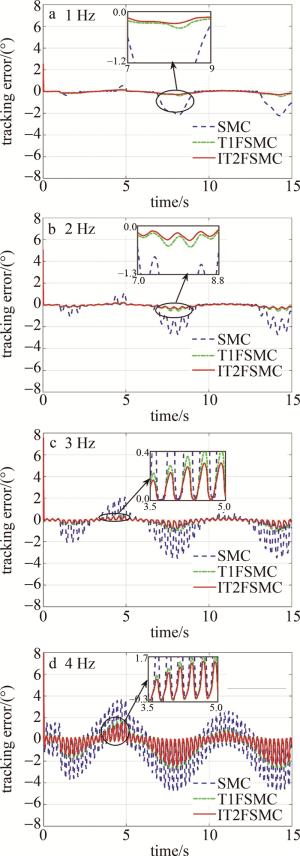
图 10 扰动存在下,幅值为200的不同频率正弦信号跟踪误差
Figure 10. Tracking error of sinusoidal signal with amplitude of 200 at different frequencies in the presence of disturbance
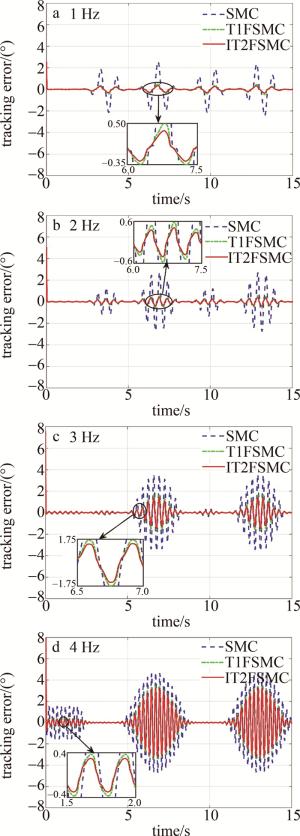
图 11 参数不确定下,幅值为200的不同频率正弦信号跟踪误差
Figure 11. Tracking error of sinusoidal signal with amplitude of 200 at different frequencies in the presence of parameter uncertainty
-
本节中通过实验对比SMC和IT2FSMC两种控制方法的性能。首先是对比两种控制方法的扰动抑制能力,其次对比两种控制方法处理不确定性的能力。
给定幅值为200、频率为1 Hz的正弦信号,分别在无扰动、扰动频率为0.5 Hz和1 Hz(扰动幅值为500)的情况下进行实验,其在线跟踪误差分别为图 12a、图 12b、图 12c所示。更改给定正弦频率为2 Hz,其在线跟踪误差分别为图 13a、图 13b、图 13c所示。为了进一步验证IT2FSMC的扰动抑制性能,设定跟踪平台跟踪值为200,在系统不同运行时刻给平台手动添加幅值为500、频率分别为1 Hz、2 Hz的正弦扰动,记录跟踪平台的位置响应误差,如图 14所示。从图 12~图 14中可以看出,IT2FSMC具有更小的跟踪误差,说明存在扰动时,IT2FSMC对扰动具有更强的抑制能力。
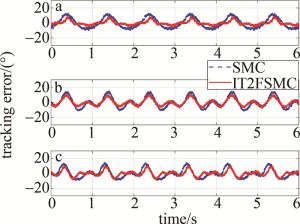
图 12 不同正弦扰动下,幅值为200、频率为1 Hz的正弦信号跟踪误差
Figure 12. Tracking error of sinusoidal signal with amplitude of 200 and frequency of 1 Hz in the presence of different sinusoidal disturbances
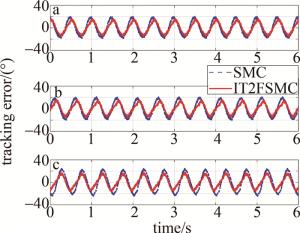
图 13 不同正弦扰动下,幅值为200、频率为2 Hz的正弦信号跟踪误差
Figure 13. Tracking error of sinusoidal signal with amplitude of 200 and frequency of 2 Hz in the presence of different sinusoidal disturbances
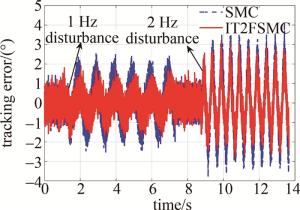
图 14 幅值为500的不同频率的正弦扰动下,各种控制器的扰动抑制能力对比
Figure 14. Comparison of disturbance suppression ability of various controllers in the presence of sinusoidal disturbances with amplitude of 500 and different frequencies
图 15、图 16所示为系统对象特性发生变化前后跟踪频率分别为1 Hz、2 Hz正弦信号的跟踪误差。可以看出,两种控制方法在一定程度上都能够抑制不确定性,但是在对象特性变化后,SMC的跟踪误差增大明显,而IT2FSMC基本上能够保持对象特性变化前的跟踪性能。这说明IT2FSMC处理不确定性的能力更强。
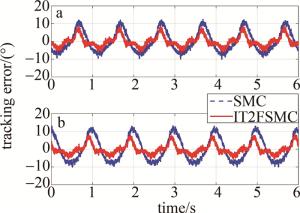
图 15 不同系统对象特性情况下,幅值为200、频率为1 Hz的正弦信号跟踪误差
Figure 15. Tracking error of sinusoidal signal with amplitude of 200 and frequency of 1 Hz under different system object characteristics

图 16 不同系统对象特性情况下,幅值为200、频率为2 Hz的正弦信号跟踪误差
Figure 16. Tracking error of a sinusoidal signal with an amplitude of 200 and frequency of 1 Hz under different system object characteristics
-
为了提高运动平台上ETS的扰动抑制能力和跟踪精度,本文中采用SMC控制方法,同时为了解决SMC的抖振和控制精度之间的矛盾,提出了基于FLC的SMC方法,该方法在降低SMC抖振的同时减小了SMC的跟踪误差。为了更好地处理系统中的扰动和不确定性问题,进一步减小SMC的抖振及提升系统跟踪精度,在T1FSMC的基础上又提出了IT2FSMC。仿真证明了T1FLC能在降低SMC抖振的同时提升跟踪精度,而IT2FLC的引入, 在T1FLC的基础上进一步降低了SMC的抖振并提升了控制系统的跟踪精度。实验结果验证了IT2FSMC方法的优越性以及在控制系统中应用的可行性。本文作者所设计的方法为运动平台ETS实现高精度跟踪提供了一种实用的控制方案。
光电跟踪系统的区间2型模糊滑模控制方法
Interval type-2 fuzzy sliding mode control method of electro optical tracking system
-
摘要: 为了提升高精度光电跟踪系统(ETS)的跟踪精度和其处理不确定性的能力,设计了一种1型模糊滑模控制方法,模糊控制用于在线自适应调整滑模控制(SMC)切换项参数;并采用区间2型模糊滑模控制(IT2FSMC)方法来提高系统处理不确定性的能力, 进而提升跟踪精度,同时降低SMC抖振;此外,用粒子群优化算法来保证选取的SMC参数相对最优,并对提出的各种控制方法进行了理论分析和实验对比。结果表明,IT2FSMC能在降低SMC抖振的同时将SMC的稳态误差降低54.43%。仿真和实验分析验证了所提出控制方法在ETS中的有效性。Abstract: In order to solve the problem of insufficient tracking accuracy of high precision electro optical tracking system (ETS) and to improve its ability to deal with uncertainty, a fuzzy sliding mode control method was designed first. The fuzzy logic control was used to adaptively adjust the switching term parameters of the sliding mode control (SMC) on line. Secondly, an interval type 2 fuzzy sliding mode control (IT2FSMC) method was designed to improve the ability of the system to deal with the uncertainty, and then to improve the tracking accuracy, so as to reduce the chattering of SMC. In addition, particle swarm optimization algorithm was used to ensure that the selected SMC parameters are relatively optimal. The proposed control methods were analyzed theoretically and compared experimentally. The results show that IT2FSMC can reduce SMC steady state error by 54.43% while reducing the chattering of SMC. Simulation and experimental analysis verify the effectiveness of the proposed control method in ETS.
-
图 7 实验平台伯德图
a—对象特性变化前 b—对象特性变化后
Figure 7. Bode diagram of experimental platform
a—before object properties change b—after object properties change
图 8 扰动抑制效果
a—位置响应 b—控制输入 c—跟踪误差
Figure 8. Effect of disturbance suppression
a—position response b—control input c—tracking error
图 9 不确定性抑制效果
a—位置响应 b—控制输入 c—跟踪误差
Figure 9. Effect of uncertainty suppression
a—position response b—control input c—tracking error
图 10 扰动存在下,幅值为200的不同频率正弦信号跟踪误差
Figure 10. Tracking error of sinusoidal signal with amplitude of 200 at different frequencies in the presence of disturbance
图 11 参数不确定下,幅值为200的不同频率正弦信号跟踪误差
Figure 11. Tracking error of sinusoidal signal with amplitude of 200 at different frequencies in the presence of parameter uncertainty
图 12 不同正弦扰动下,幅值为200、频率为1 Hz的正弦信号跟踪误差
a—无扰动 b—扰动幅值为500、频率为0.5 Hz c—扰动幅值为500、频率为1 Hz
Figure 12. Tracking error of sinusoidal signal with amplitude of 200 and frequency of 1 Hz in the presence of different sinusoidal disturbances
a—without disturbance b—the amplitude of disturbance is 500 and the frequency is 0.5 Hz c—the amplitude of disturbance is 500 and the frequency is 1 Hz
图 13 不同正弦扰动下,幅值为200、频率为2 Hz的正弦信号跟踪误差
a—无扰动 b—扰动幅值为500、频率为0.5 Hz c—扰动幅值为500、频率为1 Hz
Figure 13. Tracking error of sinusoidal signal with amplitude of 200 and frequency of 2 Hz in the presence of different sinusoidal disturbances
a—without disturbance b—the amplitude of disturbance is 500 and the frequency is 0.5 Hz c—the amplitude of disturbance is 500 and the frequency is 1 Hz
图 14 幅值为500的不同频率的正弦扰动下,各种控制器的扰动抑制能力对比
Figure 14. Comparison of disturbance suppression ability of various controllers in the presence of sinusoidal disturbances with amplitude of 500 and different frequencies
图 15 不同系统对象特性情况下,幅值为200、频率为1 Hz的正弦信号跟踪误差
a—变化前 b—变化后
Figure 15. Tracking error of sinusoidal signal with amplitude of 200 and frequency of 1 Hz under different system object characteristics
a—before change b—after change
图 16 不同系统对象特性情况下,幅值为200、频率为2 Hz的正弦信号跟踪误差
a—变化前 b—变化后
Figure 16. Tracking error of a sinusoidal signal with an amplitude of 200 and frequency of 1 Hz under different system object characteristics
a—before change b—after change
表 1 系统的Takagi-Sugeno模糊规则
Table 1. Takagi-Sugeno fuzzy rules of the system
rules E N Z P Ec N Pb Ns Z Z Ps Nb Ps P Z Ns Pb  下载: 导出CSV
下载: 导出CSV
表 2 控制器参数
Table 2. Parameters of controllers
controllers parameters SMC α=103.8131,β=1.4901,kc=8, η=1.8000k T1SMC α=103.8131,β=1.4901,kc=8, ke=1.25,kec=0.1 IT2FSMC α=103.8131,β=1.4901,kc=8, ke=1.25, kec=0.1, A=0.1, B=0.5,C=0.1
下载: 导出CSV
-
[1] BIGLEY W J. Supervisory control of electro-optic tracking and pointing[J]. Proceedings of the SPIE, 1990, 1304: 207-218. doi: 10.1117/12.21566 [2] 马佳光, 尹义林. 778光电经纬仪跟踪控制系统[J]. 光电工程, 1986, 13(1): 50-60. MA J G, YIN Y L. The 778 tracking control system[J]. Opto-Electronic Engineering, 1986, 13(1): 50-60(in Chinese). [3] 傅承毓, 马佳光, 叶步霞, 等. 复合轴控制系统应用研究[J]. 光电工程, 1998, 25(4): 1-12. FU Ch Y, MA J G, YE B X, et al. The application research of the composite axis control system[J]. Opto-Electronic Engineering, 1998, 25(4): 1-12(in Chinese). [4] 王毅, 高伟志, 王贵文, 等. 光电精密跟踪的双重复合轴伺服系统[J]. 光学精密工程, 1996, 4(4): 58-61(in Chinese). doi: 10.3321/j.issn:1004-924X.1996.04.011 WANG Y, GAO W Zh, WANG G W, et al. Dual compound axis servo system of opto-electronic precision tracking[J]. Optics and Precision Engineering, 1996, 4(4): 58-61(in Chinese). doi: 10.3321/j.issn:1004-924X.1996.04.011 [5] 周新力, 李醒飞. 光电跟踪系统积分反步自抗扰控制策略[J]. 天津大学学报(自然科学与工程技术版), 2021, 54(4): 379-387. ZHOU X L, LI X F. Integral backstepping active disturbance rejection control strategy for the electro-optical targeting system[J]. Journal of Tianjin University (Science and Technology Edition), 2021, 54(4): 379-387(in Chinese). [6] 秦树旺, 毛耀, 包启亮. 光电跟踪系统的模糊Ⅱ型控制技术研究[J]. 激光技术, 2021, 45(2): 147-154. QIN Sh W, MAO Y, BAO Q L. Research on fuzzy Ⅱ-order control method of photoelectric servo tracking systems[J]. Laser Technology, 2021, 45(2): 147-154(in Chinese). [7] ZHOU X L, LI X F. Trajectory tracking control for electro-optical tracking system using ESO based fractional-order sliding mode control[J]. IEEE Access, 2021, 9: 45891-45902. doi: 10.1109/ACCESS.2021.3067680 [8] YU X H, KAYNAK O. Sliding-mode control with soft computing: A survey[J]. IEEE Transactions on Industrial Electronics, 2009, 56(9): 3275-3285. doi: 10.1109/TIE.2009.2027531 [9] 乔琦, 钟铭亮, 任维, 等. 具有输入饱和的光电伺服平台的滑模控制[J]. 激光技术, 2020, 44(4): 429-435. QIAO Q, ZHONG M L, REN W, et al. Sliding mode control of the photoelectric servo platform with input saturation[J]. Laser Technology, 2020, 44(4): 429-435(in Chinese). [10] ZHANG B, NIE K, CHEN X L, et al. Development of sliding mode controller based on internal model controller for higher precision electro-optical tracking system[J]. Actuators, 2022, 11(1): 16. [11] HUANG J, ZHANG Z R, HAN J B, et al. Sliding mode control of permanent magnet generator system based on improved exponential rate reaching law[J]. IET Electric Power Applications, 2020, 14(7): 1154-1162. [12] TANG Q R, LI Y H, GUO R Q, et al. Chattering-suppression sliding mode control of an autonomous underwater vehicle based on nonlinear disturbance observer and power function reaching law[J]. Transactions of the Institute of Measurement and Control, 2021, 43(9): 2081-2093. [13] ABADI A S S, HOSSEINABADI P A, SOIN N B, et al. Chattering-free adaptive finite-time sliding mode control for trajectory tracking of MEMS gyroscope[J]. Automatic Control and Computer Sciences, 2020, 54(4): 335-345. [14] 朱海荣, 焦子韵, 冒建亮, 等. 基于扰动观测器的光电跟踪平台滑模控制[J]. 自动化与仪表, 2018, 33(7): 33-37. ZHU H R, JIAO Z Y, MAO J L, et al. Disturbance observer based on sliding mode control of electro-optical tracking platform[J]. Automation & Instrumenation, 2018, 33(7): 33-37(in Chinese). [15] 任彦, 牛志强. 新型终端滑模在光电稳定平台中的应用[J]. 红外与激光工程, 2018, 47(6): 114-120. REN Y, NIU Zh Q. Application of new terminal sliding mode in photoelectric stabilized platform[J]. Infrared and Laser Engineering, 2018, 47(6): 114-120(in Chinese). [16] 乔琦. 输入饱和及扰动存在条件下的光电稳定平台滑模控制[D]. 成都: 中国科学院大学(中国科学院光电技术研究所), 2020: 50-65. QIAO Q. Sliding mode control of the optoelectronic stabilized platform with input saturation and disturbance[D]. Chengdu: University of Chinese Academy of Sciences (Institute of Optics and Electronics, Chinese Academy of Sciences), 2020: 50-65(in Chinese). [17] MENDAL J M. Type-2 fuzzy sets and systems: An overview[J]. IEEE Computational Intelligence Magazine, 2007, 2(1): 20-29. [18] 伍冬睿, 曾志刚, 莫红, 等. 区间二型模糊集和模糊系统: 综述与展望[J]. 自动化学报, 2020, 46(8): 1539-1556. WU D R, ZENG Zh G, MO H, et al. Interval type-2 fuzzy sets and systems: Overview and outlook[J]. Acta Automatica Sinica, 2020, 46(8): 1539-1556(in Chinese). [19] 汪永阳. 基于快速反射镜的高精度视轴稳定技术研究[D]. 长春: 中国科学院长春光学精密机械与物理研究所, 2016: 18-20. WANG Y Y. Research on high precision LOS stabilization technology based on fast steering mirror[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2016: 18-20(in Chinese). [20] 张士涛. 音圈式大行程快速反射镜及其视轴稳定技术研究[D]. 长春: 中国科学院长春光学精密机械与物理研究所, 2019: 16-28. ZHANG Sh T. Research on large-scale fast-steering-mirror driven by voice coil motor and its line-of-sight stabilization technology[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2019: 16-28(in Chinese). [21] 任戈. 复合轴结构的运动关系分析[J]. 光电工程, 1995, 22(6): 41-46. REN G. An analysis of kinematic relationship for compound-axis structure[J]. Opto-Electronic Engineering, 1995, 22(6): 41-46(in Chinese). [22] 齐艺超, 陈伟, 穆春元, 等. 基于粒子群自整定PID算法的激光器温度控制系统[J]. 激光技术, 2019, 43(5): 60-64. QI Y Ch, CHEN W, MU Ch Y, et al. Laser temperature control system based on particle swarm self-tuning PID algorithm[J]. Laser Technology, 2019, 43(5): 60-64(in Chinese). [23] 徐峰, 李东海, 薛亚丽. 基于ITAE指标的PID参数整定方法比较研究[J]. 中国电机工程学报, 2003, 23(8): 206-210. XU F, LI D H, XUE Y L. Comparing and optimum seeking of PID tuning methods base on ITAE index[J]. Proceedings of the CSEE, 2003, 23(8): 206-210(in Chinese). -

 点击查看大图
点击查看大图
计量
- 文章访问数: 7239
- HTML全文浏览量: 2065
- PDF下载量: 28
- 被引次数: 0
