 网站地图
网站地图

 下载:
下载:


-
酒后驾驶是导致交通事故发生的重要原因之一。为应对酒驾带来的严峻交通安全威胁,公安交通管理部门已将醉酒驾车写入刑法,但即便如此,酒后驾驶行为仍然难以有效控制。为提高酒驾检查的覆盖率,公安交通管理部门增大警力、物力和扩大时间段及地段进行排查,但由于依赖于传统的接触式检测手段,无法远程判断驾驶人是否饮酒,只能对车辆逐一排查,这样不仅效率低而且还影响正常的交通。因此,如何通过技术手段有效快速查处酒驾成为维护社会公共安全的焦点问题之一。
随着激光吸收光谱技术的发展,近年来该技术逐渐应用到甲烷、二氧化碳等气体分子的远程在线监测[1-3],也有学者尝试将其应用到酒驾车辆中酒精气体分子的远程监测。酒驾人员呼出气体中酒精气体含量的精确定量测量成为该技术应用的先决条件。
-
光学遥感探测酒精气体浓度主要是基于物质的光谱吸收特性,当位于物质吸收带处的光束通过待测气体时,待测气体吸收该波段光束,使光束通过后强度减弱,减弱的程度与待测气体浓度有关,这一关系可以用朗伯-比尔(Lambert-Beer)定律来描述:
$ \begin{array}{l} I\left( \lambda \right) = {I_0}\left( \lambda \right){\rm{exp}}\left[ { - \alpha \left( \lambda \right)cL} \right]\\ = {I_0}(\lambda ){\rm{exp}}\left[ { - A(\lambda )} \right] \end{array} $
(1) 式中,λ为光束波长(μm);I0(λ)和I(λ)分别为发射功率和接收功率(W);α(λ)为被测气体在波长λ处的光谱吸收截面(cm2·mol-1);c为被测气体分子数浓度(mol·cm-3);L为吸收路径长度(cm);A(λ)为吸光度(%)。
目前酒驾激光遥感探测技术主要有两大技术路线,一是定波长差分吸收雷达技术[4-5],二是可调谐二极管激光吸收光谱技术[6-9]。
定波长差分吸收雷达技术是利用两束不同波长激光的差分吸收来探测物质浓度,一束激光波长与待测气体分子光谱吸收峰值波长重合(主波长),一束激光波长与待测气体吸收峰波长接近但刚好移出该吸收谱线(参考波长),利用主波长与待测气体分子吸收而衰减的特性,通过测量其衰减程度得到气体浓度信息,利用参考波长来消除大气中的其它物质及光学仪器对该波长的吸收和仪器参量等因素对测量精度的影响。
可调谐二极管激光吸收光谱技术是利用可调谐二极管激光器的可调谐特性,使激光波长在待测气体的吸收带范围内扫描,从而遍历气体吸收峰,发展中出现了以锯齿波调制、对吸收谱线进行积分获得待测气体浓度的直接吸收方法和以锯齿波和正弦波调制、利用二次谐波反演气体浓度的波长调制方法。
-
利用激光探测酒精浓度的方法最早在1975年由ALOBADI[10]等人提出,选用了乙醇在3.39μm处吸收峰,激光器采用了3.39μm He-Ne激光器。
2000年左右,波兰、日本等国家陆续发表了利用激光差分吸收技术探测酒精气体的专利。如波兰学者[11]采用两个定波长激光器对体积分数为1300×10-6酒精气体吸收池探测进行了试验验证,一个波段位于3.49μm吸收带内,激光器为He-Ne激光器,另一个波段位于3.49μm吸收带之外。日本学者[12]提出利用两个二极管激光器对乙醇浓度进行定性探测,所选波长分别为2.75μm(吸收峰处)、2.70μm或2.80μm(吸收峰外),两个激光器为脉冲式,以60ns时间间隔被同一个探测器接收。
2007年, SCHUETZ等人[13]提出基于3.38μm和3.54μm双波长激光差分吸收探测酒精气体,探测极限达到40×10-6(体积分数)。
2013年, 波兰华沙军事科技大学学者[14]采用改进激光差分吸收雷达技术,主波长为3.39μm,参考波长为1.5μm,引入了第三波长1.3μm。该第三波长位于乙醇、水和二氧化碳吸收带之外,利用车窗在第三波长处和参考波长处透过率不同来消除车窗吸收对酒精浓度反演的影响。2014年, 该研究团队搭建了验证装置,采用3.39μm红外激光实现了体积分数为0.0001的乙醇的探测[15]。
-
20世纪90年代末开始研究可调谐二极管激光吸收光谱(tunable diode laser absorption sprectrum,TDLAS)在酒精气体探测中的应用,在发展过程中,出现了直接吸收和波长调制等技术。
1995年, 加拿大AZZAZY[16]等人提出利用分布反馈式可调节二极管激光光谱(tunable diode laser spectroscopy,TDLS)进行酒精气体遥感探测,通过对激光波长进行正弦调制来提高最低探测能力,所选波长为1.39μm,该波段为乙醇的窄Q-branch吸收带。
1999年, 俄罗斯科学院研究人员通用物理研究所NADEZHDINSKII[17]等人选择了乙醇在1.39μm处的Q-branch吸收带,研究者利用锯齿脉冲电流进行扫描,应用直接吸收方法所探测极限达到50×10-6(体积分数),探测精度为2%。
2007年,俄罗斯波罗的海国立技术大学BOREYSHO教授研究出用于车内酒精气体遥感检测的激光检测设备Alcolaser[18](见图 1),该设备应用了波长调制的办法,能够在25m远的距离上对运动汽车进行检测,检测出空气中体积分数为1×10-6的酒精,检测时间小于0.1s。

Figure 1. The prototype of Alcolaser
国内,中国科学院长春光学精密机械与物理研究所、安徽光学精密机械研究所等单位近些年来也开展了基于TDLAS技术的酒精遥感探测技术研究。长春光学精密机械与物理研究所WANG等人[19-20]用激光器驱动控制单元产生锯齿波和正弦波叠加调制信号,使激光输出波长调谐在902nm~909nm范围内,扫过905nm中心波长,通过锁相放大检测单元检出一次和二次谐波幅度进行酒精气体浓度反演。中国科学院安徽光学精密机械研究所KAN[21-22]等人利用TDLAS方法测量了含有少量水汽的酒精蒸汽在7180cm-1附近的吸收谱线。
-
目前上述方法本质上均是用单一物质的单一吸收峰测量酒精气体含量,所选波长尽管位于酒精气体吸收带内,但在吸收带处存在其它物质如呼出气体中水汽的吸收,会干扰酒精气体的定量精确测量。此外,所测浓度为车厢内酒精气体浓度而非呼出气体中乙醇浓度,酒精气体从口腔中呼出后在车厢内扩散稀释,浓度会减小,以车厢内的酒精气体浓度为判据用于酒驾人员是否酒驾会降低检测有效率。为精确获得呼出气体中酒精气体浓度的信息,除了获得车内酒精气体浓度和水汽浓度,还需要获得酒精气体从呼出时的浓度稀释到车内平均浓度的稀释系数。
-
酒驾人员呼气时口腔附近酒精气体浓度最高,扩散到车内后酒精气体浓度会呈现为一个稀释值。目前的检测方法所获得的均是路径中的酒精气体平均浓度。为精确获得呼出气体中酒精气体浓度的信息,需要获得从呼出时的浓度到车内平均浓度的稀释值。为此,引入参考气体如水或二氧化碳的探测,通过增加参考气体的探测,一方面去除其对目标酒精气体的干扰,另一方面通过参考气体的稀释状况来获得目标酒精气体呼出时的浓度。由于呼出气体中的水汽浓度是确定、已知的,而参考气体与目标气体酒精的稀释情况相同,因此,通过遥测参考气体浓度与车内酒精气体浓度,结合已知的呼出气体中参考气体浓度,就可以获得呼出气体中酒精气体实际浓度。
$ {C_{{\rm{e, b}}}} = \frac{{{C_{{\rm{e, c}}}}}}{{{C_{{\rm{w, c}}}}}}{C_{{\rm{w, b}}}} $
(2) 式中,Ce, b为呼出气体中酒精气体浓度,Cw, b为呼出气体中水汽浓度,Ce, c为车内酒精气体浓度,Cw, c为车内水汽浓度。
-
为获得酒精气体、水汽的吸收光谱,利用分光光度计测量0.80μm~2.0μm范围内酒精气体、水汽以及酒水混合气体吸收光谱,结果见图 2,纵坐标为吸光度,无量纲。
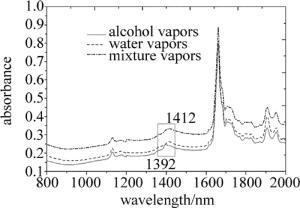
Figure 2. Absorption spectrums of alcohol vapors, water vapors and mixture vapors of water and alcohol
从测量曲线可以看出,1.412μm是水汽吸收较为明显的地方,1.392μm是酒精吸收较为明显的地方,但其边缘与水的吸收峰重叠明显。酒精气体浓度的测量需要排除水的干扰。
根据酒精气体和水汽的吸收特性,本文中提出双波长激光同时探测乙醇和水汽浓度方法。采用两个近红外波长激光器作为探测源,其中一个波长为1.392μm,处于酒精的吸收峰内,该吸收峰与水吸收峰有部分交叠;另一个波长为1.412μm,处于水吸收峰内,且不受大气中其它物质的影响。
-
基于激光遥感的酒驾遥感预警系统组成见图 3。主要由激光器、光束控制器、光学天线、探测器和信号提取单元等组成。各个模块的作用分述如下:激光驱动器1和驱动器2分别通过电流和温度控制使波长1和波长2两台激光发出所需的波长和功率;光束控制器包括光纤合束器和准直器,使两束激光共光路、准直输出;反射镜为角反射镜,位于马路另一端,使激光反向回传到接收端;光学天线将反射回的激光光束汇聚;探测器进行光电转化;滤波放大单元进行去噪和信号放大;信号提取单元进行接收功率的信号提取;浓度反演单元进行酒精、水汽以及稀释系数的反演,以及呼出气体中酒精浓度的计算。
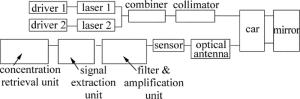
Figure 3. Scheme of remote sensing and early warning system of alcohol impaired driving
系统工作时,在车辆未经过前,两束激光器同时发出激光,反射回的激光信号存储在浓度反演单元中,车辆经过时,经激光光源出射后通过被测车辆,被反射镜反射回的光束再次经过酒驾车辆,带有酒气浓度的激光信号送入信号采集系统进行信号提取,浓度反演单元根据前后两次信号进行反演处理,即可获得到呼出气体中酒精浓度信息。若呼出气体中酒精浓度达到设定的阈值,系统则发出告警信号到交通网络管理平台,再由交通网络管理平台触发电子眼获取车辆及车内驾驶人员信息,同时通知执法人员对预警系统锁定的嫌疑车辆进行拦截。
-
车辆通过前,两支激光器向对侧打出激光,反射回路接收,由于车辆通过前路径上无酒精气体,激光器信号的损耗主要是由系统的光学损失以及大气中水汽吸收造成的,两束激光器的接收信号用下式表达:
$ {I_{{\rm{1, r}}}} = {I_{{\rm{1, t}}}}{T_1}{\rm{exp}}( - {\alpha _{{\rm{1, w}}}}{C_{\rm{w}}}{L_{\rm{a}}}){\rm{ }} $
(3) $ {I_{{\rm{2, r}}}} = {I_{{\rm{2, t}}}}{T_2}{\rm{exp}}( - {\alpha _{{\rm{2, w}}}}{C_{\rm{w}}}{L_{\rm{a}}}) $
(4) 式中,下标1和2分别代表激光器1(波长1.412μm)和激光器2(波长1.392μm); I1, t和I2, t分别为激光器1和激光器2在车辆经过前的发射功率; I1, r和I2, r分别为激光器1和激光器2在车辆经过前的接收功率; T1和T2分别为大气在激光器1和激光器2波长处的透过率; α1, w和α2, w分别为水在激光器1和激光器2波长处的吸收截面; Cw为大气中水汽分子数浓度; La代表大气中吸收路径长度。
车辆通过时,两支激光器再次向车辆打出激光,经对侧反射镜反射回来后接收,激光器信号的损耗除了由系统的光学损失以及大气中水汽吸收引起外,车内酒驾人员呼出气体中的乙醇和水汽也会造成激光信号损耗,两束激光器的接收信号表达为:
$ {I_{{\rm{1, r}}}}^\prime = {I_{{\rm{1, t}}}}\prime {T_1}{\rm{exp}}( - {\alpha _{{\rm{1, w}}}}{C_{\rm{w}}}{L_{\rm{a}}} - {\alpha _{{\rm{1, w}}}}{C_{{\rm{w, c}}}}{L_{\rm{c}}}){\rm{ }} $
(5) $ \begin{array}{l} {I_{{\rm{2, r}}}}^\prime = {I_{{\rm{2, t}}}}\prime {T_2}{\rm{exp}}( - {\alpha _{{\rm{2, w}}}}{C_{\rm{w}}}{L_{\rm{a}}} - \\ {\alpha _{{\rm{2, w}}}}{C_{{\rm{w, c}}}}{L_{\rm{c}}} - {\alpha _{{\rm{2, e}}}}{C_{{\rm{e, c}}}}{L_{\rm{c}}}) \end{array} $
(6) 式中,上标′代表车辆通过时,下标c代表车内状态,e代表乙醇,w代表水汽。
对于1.412μm波长而言,车辆通过时的接收与发射功率的比值,与车辆通过前的接收与发射功率比值,两者之比反映了车内水汽浓度Cw, c:
$ \frac{{{I_{{\rm{1, r}}}}\prime }}{{{I_{{\rm{1, t}}}}\prime }}\frac{{{I_{{\rm{1, t}}}}}}{{{I_{{\rm{1, r}}}}}} = {\rm{exp}}( - {\alpha _{{\rm{1, w}}}}{C_{{\rm{w, c}}}}{L_{\rm{c}}}) $
(7) $ {C_{{\rm{w, c}}}} = \frac{{{\rm{ ln}}\left( {\frac{{{I_{{\rm{1, r}}}}\prime }}{{{I_{{\rm{1, t}}}}\prime }}\frac{{{I_{{\rm{1, t}}}}}}{{{I_{{\rm{1, r}}}}}}} \right)}}{{{\alpha _{{\rm{1, w}}}}{L_{\rm{c}}}}} $
(8) 对于波长1.392μm,车辆通过时的接收与发射功率比值,车辆通过前的接收与发射功率比值,两者之比反映了车内水汽和乙醇的浓度之和:
$ \frac{{{I_{{\rm{2}}, {\rm{r}}}}\prime }}{{{I_{{\rm{2, t}}}}\prime }}\frac{{{I_{{\rm{2, t}}}}}}{{{I_{{\rm{2, r}}}}}}{\rm{}} = {\rm{exp}}\left[ { - ({\alpha _{{\rm{2, w}}}}{C_{{\rm{w, c}}}} + {\alpha _{{\rm{2, e}}}}{C_{{\rm{e, c}}}}){L_{\rm{c}}}} \right] $
(9) 将(8)式带入(9)式,即可获得车内酒精气体浓度Ce, c:
$ {C_{{\rm{e, c}}}} = \frac{{{L_{\rm{c}}}^{ - 1}{\rm{ln}}{I_{{\rm{2, r}}}}\prime {I_{{\rm{2, t}}}}\prime {I_{{\rm{2, t}}}}{\rm{}}{I_{{\rm{2, r}}}} - {\alpha _{{\rm{2, w}}}}{C_{{\rm{w, c}}}}}}{{{\alpha _{{\rm{2, e}}}}}} $
(10) 将车内酒精气体浓度Ce, c、车内水汽浓度Cw, c以及已知的呼出气体中水汽浓度Cw, b带入(2)式,即可获得呼出气体中酒精气体浓度。在实际应用中,水汽、酒精气体的吸收截面参量通过实验测试建立数据库,驾驶室宽度由图像识别车型获取。
-
基于激光遥感的酒驾车辆远程探测技术利用非接触方式探测车内酒气浓度,具有免停车、检测快的特点,有助于实现酒驾快速筛查,提高道路通行速度。本文中综合介绍了目前酒驾激光遥感探测技术现状,针对目前技术存在的不能定量反演呼出气体中酒精气体浓度的问题,提出了以参考气体浓度作为标定、以双波长激光差分吸收同时探测车内乙醇和水汽浓度,从而获得酒驾人员呼气中的酒气含量,为酒驾远程监测提供了一种更准确的解决方案。
基于激光遥感的酒驾遥感探测技术研究
Study on remote detection of alcohol impaired driving based on laser remote sensing
-
摘要: 为了更精确定量遥测酒驾人员呼出气体中的酒精气体浓度,采用同时测量酒精气体浓度和水汽浓度且同步获取车内酒精气体稀释系数的双谱段定波长激光遥感探测方法,进行了酒精浓度、水汽浓度的反演算法以及稀释系数计算的理论分析和对吸收光谱的实验验证,取得了酒精气体和水汽光谱吸收特性,确定了所用激光波长为1392nm和1412nm。结果表明,该方法可以排除水汽干扰且获得酒气稀释系数,可更精确定量测量呼出气体中的酒气浓度。Abstract: In order to measure the concentration of alcohol gas in the drunk drivers' breath more accurately and quantitatively, the bi-spectrum laser remote sensing detection method was used to detect the concentration of alcohol gas and water vapor at the same time, and the dilution coefficient of the alcohol gas in the vehicle was simultaneously obtained. The inversion algorithm of alcohol concentration and water vapor concentration was carried out. The dilution coefficient was calculated theoretically and the absorption spectrum was verified by experiments. The spectrum absorption characteristics of alcohol gas and water vapor were obtained. The results show that, the laser wavelength are determined to be 1392nm and 1412nm. The method can eliminate moisture interference and obtain the dilution coefficient of alcohol gas, which can more accurately and quantitatively measure the concentration of alcohol in exhaled gas.
-
Key words:
- remote sensing /
- laser technique /
- alcohol impaired driving /
- differential absorption
-
Figure 2. Absorption spectrums of alcohol vapors, water vapors and mixture vapors of water and alcohol
-
[1] LAI S L, WANG H, GONG P, et al. Research of propane detecting based on near-infrared laser spectral absorption[J]. Laser Technology, 2017, 41(2):284-288(in Chinese). [2] SHI Ch L, LIU J Q, BI D C, et al. Errors analysis of dioxide carbon concentrations measurement by airborne Lidar[J]. Infrared and Laser Engineering, 2016, 45(5) : 0530001(in Chinese). [3] LI B, LIU H F, HE Q X, et al. A methane detection system using distributed feedback laser at 1654nm[J]. Spectroscopy and Spectral Analysis, 2016, 36(1):20-26(in Chinese). [4] CHEN Y F, WANG X B, LIU Q W, et al. Mobile SO2 differential absorption lidar system[J]. Acta Photonica Sinica, 2017, 46(7):29-35(in Chinese). [5] LIN J M, CAO K F, HU Sh X, et al. Experiment study of SO2 mea-surement by differential absorption Lidar[J]. Infrared and Laser Engineering, 2015, 44(3):872-878(in Chinese). [6] DONG X Zh. The application research of vehicle-mounted natural gas leak detection system[D]. Ji'nan: Shandong University, 2014: 6-7(in Chinese). [7] LIU Y, WU J N, CHEN M M, et al.The trace methane sensor based on TDLAS-WMS[J]. Spectroscopy and Spectral Analysis, 2016, 36(1):279-282(in Chinese). [8] WANG X M, LIU Sh.CO2 Concentration measurement based on TDLAS[J]. Control and Instruments in Chemical Industry, 2016, 43(11):1158-1161(in Chinese). [9] XU M. Research on TDLAS gas detection system based on calibration-free wavelength modulation spectroscopy[D]. Chengdu: University of Electronic Science and Technology of China, 2016: 8-16(in Chin-ese). [10] ALOBADI T A, HILL D W. A helium-neon laser infrared analyzer for alcohol vapour in the breath[J]. Journal of Physics, 1975, E8(1): 30-32. [11] MIERCZYK Z, KOPCZYŃSKI K, KUBICKI J, et al. Device for remote detection of alcohol vapours in a car: Poland, 0389627[P]. 2011-05-23. [12] NISHIDA S. Alcohol detector in vehicle: Japan, 0033865[P]. 2000-08-22. [13] SCHUETZ M. A mid-IR DIAL system using interband cascade laser diodes[C]//2007 Quantum Electronics and Laser Science Confe-rence. New York, USA: IEEE, 2007: 1-2. [14] KUBICKI J, MLYŃCZAK J. Application of modified difference absorption method to stand-off detection of alcohol in simulated car ca-bins[J]. Journal of Applied Remote Sensing, 2013, 7(1): 073529. [15] KUBICKI J, MLYŃCZAK J. Stand-off detection of alcohol in car cabins[J]. Journal of Applied Remote Sensing, 2014, 8(1): 083627. doi: 10.1117/1.JRS.8.083627 [16] AZZAZY M, CHAU T, WU M, et al. Remote sensor to detect alco- hol impaired drivers[C]//Laser and Electro-Optics Society Annual Meeting. New York, USA: IEEE, 1995: 320-321. [17] NADEZHDINSKⅡ A, BEREZIN A, BUGOSLAVSKY Y, et al. App-lication of near-IR diode lasers for measurement of ethanol vapor[J]. Spectrochimica Acta, 1999, A55(10): 2049-2055. [18] ZHANG Zh. Research on approaches and system for in-car alcohol concentration detection with laser[D]. Changchun: Changchun University of Science and Technology, 2012: 8-17(in Chinese). [19] WANG B, WANG L J, CAO J Sh, et al. A kind of quick and remote sensing automatically pre-detecting machine for alcohol impaired driving: China, 1023599951[P]. 2012-02-22 (in Chinese). [20] WANG B, WANG L J, CAO J Sh, et al. A kind of remote sensing and pre-detecting system automatically based on laser for alcohol impaired driving: China, 10254402[P]. 2011-11-23(in Chinese). [21] GENG H, ZHANG Y J, LIU W Q, et al. Acquisition method of high resolution spectra of ethanol vapor in near-IR range[J]. Journal of Atmospheric and Environmental Optics, 2012, 7(1): 57-63(in Chin- ese). [22] KAN R F, GENG H, ZHANG Y J, et al. Stand-off detection system using laser of alcohol impaired driving: China, 102590136[P]. 2012-07-15(in Chinese). -

 点击查看大图
点击查看大图

图(3)
计量
- 文章访问数: 8328
- HTML全文浏览量: 6340
- PDF下载量: 109
- 被引次数: 0
