
Detection of FOV for portable laser communication systems
-
摘要: 为了解决便携式激光通信视场角测量范围小、要求精度高、测量难度大的问题, 采用计算指定通信距离下的链路能量作为视场角测量依据,提出了一种基于便携式激光通信视场角测量的方法和装置,并在此方案设计的高精度测量装置基础上进行了实际试验测量。结果表明,探测器灵敏度为-30dBm时,在1km, 2km, 3km, 4km处测得的激光通信接收视场角分别为1.12mrad, 0.94mrad, 0.87mrad和0.63mrad。该测试方法和装置能够精确测量便携式激光通信的视场角范围,测试装置可以扩展应用于不同领域的小视场高精度测量。Abstract: In order to solve the problems of small measurement range of field of view, high precision and difficult measurement in a portable laser communication, link energy at a specified communication distance was used as the basis for measuring the field of view. A measurement method of field of view based on portable laser communication was proposed. A high-precision measurement device was designed and the actual test and measurement were carried out. The results show that, when detector sensitivity is -30dBm, the receiving field of view of laser communication at 1km, 2km, 3km, 4km is 1.12mrad, 0.94mrad, 0.87mrad and 0.63mrad respectively. The test method and device can accurately measure the field of view of a portable laser communication. The test device can be extended to high-precision measurement of small field of view in different fields.
-
引言
便携式激光通信装置由于其小体积、大容量、高保密性等特点,得到越来越多的关注与研究[1-8]。由于通信接收视场的大小间接决定了便携式激光通信系统的对准难度、环境适应能力和伺服控制能力等, 对接收视场角的测试成为便携式激光通信系统研制过程中重要的环节之一[9-11]。
对于视场角的测量方法,一种是通过视场仪直接测量,常用于室内的光学系统检测,该方法受仪器体积限制;另一种是通过焦距和像面高度计算视场角,存在畸变的系统中此方法会有一定的误差。目前,中国空空导弹研究院的LI等人构建了半导体激光引信视场角测量装置,主要包括反射镜转台和1维位移台[12];上海光学精密机械研究所的DI等人对激光高度计的视场角测量提出了解决方案,并进行了实际系统测量[13];长春理工大学的LI对红外光学系统视场角,提出了集成平行光管、高精度转台以及1维平移台的测量方法[14];华中农业大学的TAN等人设计了激光引信接收光学系统视场角的自动测试系统[15];哈尔滨工业大学的FENG等人利用三轴转台测量激光导引接收视场角[16];西安应用光学研究所的CHEN等人介绍了一种用于激光指令制导和激光驾束制导大视场角测量的激光接收机原理,给出了接收视场的数学模型,并进行了实际测量[17];中国科学院长春光学精密机械与物理研究所的ZHAGN等人利用2维角度调整台,对全捷联半主动导引头视场进行了实际测试工作[18]。
现有视场角检测方法的结构复杂、设备繁多,且测试视场均在度级别,对于激光通信领域的小视场测量方法和装置,尚鲜见报道。基于此,本文中提出了一种对便携式激光通信接收视场角的小范围高精度测试装置,同时能够通过能量模拟,适用于不同通信能量需求的接收视场角测试。本文中首先对便携式激光通信的视场角测量装置进行了设计论证,然后,对链路能量进行了理论计算,最后,利用该装置进行了实际测量试验[19-20]。
1. 测量装置设计
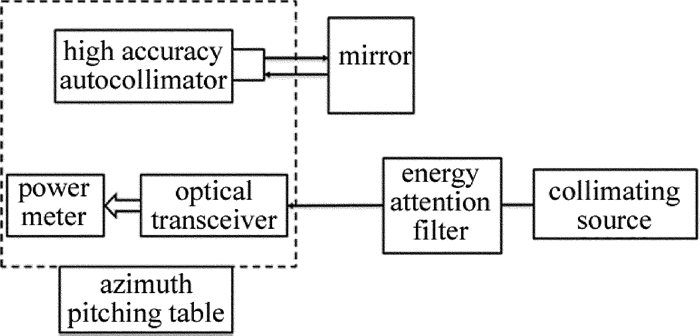
近距离无线激光通信属于非成像系统,且通信视场角很小,一般均在mrad量级,对其精确测量难度较大,基于激光通信的特点和现有检测手段,提出了一种针对激光通信接收光学系统视场角的测量方法,即利用高精度自准直仪和激光通信光端机一体运动测量视场角范围方法,如图 1所示。
准直平行光源发射1550nm的通信光,待测光端机进行接收,保证激光通信链路接通。高精度自准直仪与待测光端机放置在同一光学平台上,保证高精度自准直仪与待测光端机运动一致,高精度自准直仪偏移角度的测量结果可等效为待测光端机通信视场范围。具体工作方法如下:将待测光端机与自准直仪固定在同一光学平台上,调节2维方位俯仰台,使准直平行光源发出的大口径通信激光进入待测光端机的中心视场,调节方位俯仰台的1维姿态(方位或俯仰),直至待测光端机接收能量无法满足通信所需,记录高精度自准直仪的偏转角度,即可得到通信接收视场角范围,同时,在准直平行光源端加入了能量衰减片,通过能量衰减模拟不同链路距离下的能量。
在测量过程中需要注意的是,平面反射镜与自准直仪分别安装在两个不同的平台上,互相独立调节,平面反射镜用作将自准直仪发射的光全部反射回自准直仪。准直平行光源的出射光束口径需要实现接收口径的全覆盖。
2. 链路能量计算
视场角测试与链路能量有关,不同链路能量所对应的可通信视场不同,在保证基本链路通畅情况下,理论计算不同链路下的能量余量是决定视场角的重要因素。考虑各种损耗因素,通信链路传输方程模型可以描述成为:
Pγ=Pt−Pe−Pa−Lg+Pd (1) 式中,Pγ为激光通信链路余量, Pt为激光器发射能量, Pe为发射光路能量损耗, Pa为接收光路能量损耗, Lg为空间扩展损耗, Pd为探测器增益。依据(1)式,对1km, 2km, 3km, 4km距离下的链路能量进行了计算,具体初始参量及对应计算结果如表 1所示。
Table 1. Prediction of portable laser communication linklink distance/km 1 2 3 4 emit energy Pt/dBm 15 emission path loss Pe/dB 1 received path loss Pa/dB 1 geometric loss Lg/dB 19 25.1 28.6 31.1 image receiving energy/dBm -6 -12.1 -15.6 -18.1 detector sensitivity Pd/dBm -30 link margin Pγ/dB 24 17.9 14.4 11.9 通过表 1中的计算结果可知,1km, 2km, 3km, 4km距离下的链路余量均存在,可满足激光通信视场角测试条件。
3. 实际视场角测试
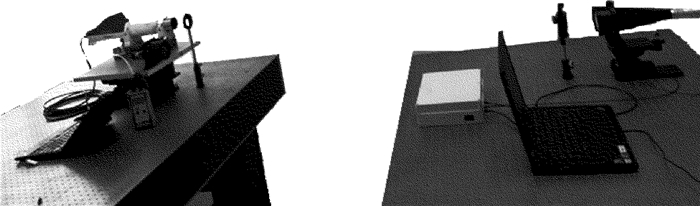
根据设计装置原理和链路能量,对便携式激光通信系统的接收视场角测试装置进行了搭建及试验,如图 2所示。其中,高精度自准直仪选用Trioptics公司的TA300-57,该仪器由1个高分辨率的CCD传感器和配套的物镜管组合而成,视场角为0.61°×0.46°;测量精度为0.5″。功率计选用宝工的MT-7601-C型光纤功率计,测量范围为-70dBm~+6dBm,测量精度为0.01dBm,校正波长包括850nm, 1300nm, 1310nm, 1490nm, 1500nm和1625nm。
具体测试步骤如下:(1)电源供电,由准直平行光源发出1550nm激光进入待测光端机;(2)调节方位俯仰台,使其对准准直平行光源,直至待测光端机的接收能量达到最大;(3)调节能量衰减片,使待测光端机接收到的能量符合链路模拟的接收能量;(4)调节平面反射镜,使高精度自准直仪发出的十字丝返回自身的靶面内;(5)使用高精度自准直仪自带的调节功能,将十字丝调零;(6)调节方位俯仰台的1维(向上),使光纤功率计接收到的光功率逐渐降低至满足激光通信所需的最低能量(取-30dBm),测量此时高精度自准直仪偏转的角度θ1;(7)调节方位俯仰台的1维(向下),光纤功率计接收能量先上升至最大值然后逐渐减低,直至光纤功率计接收光功率为-30dBm,测量此时高精度自准直仪偏转的角度θ2。
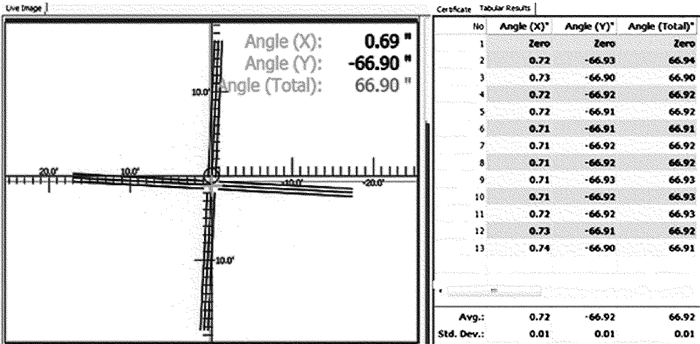
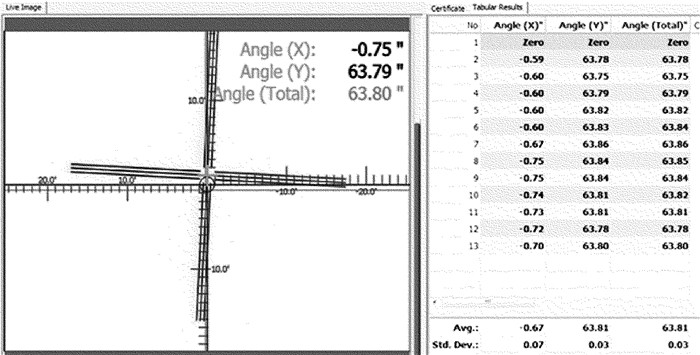
通过以上步骤完成便携式激光通信视场角的测试,测量过程中,向上和向下能量衰减间隔为1dBm时,待测光端机偏移中心视场角度,得到待测光端机的角度变化范围。通过多次测量,并将测试数据进行处理,求出上下和左右视场的平均值,进而测得最大视场角。图 3中给出测量1km距离视场角过程中,向上运动到-30dBm时的一次测量角度。图 4中给出了向下运动到-30dBm时高精度自准直仪的一次测量角度。
在此基础上,1km, 2km, 3km, 4km距离下的测试数据如表 2所示。
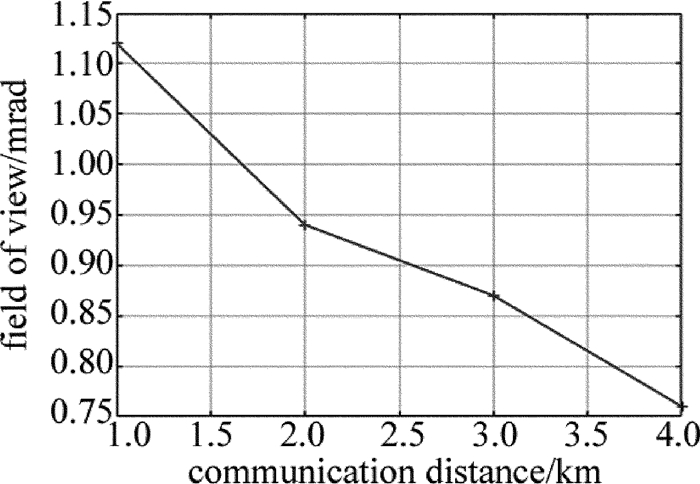
基于此,图 5给出通信距离与视场角的曲线关系。
Table 2. Data table of field angledistance/dBm upward motionangle/(″) downward motionangle/(″) field of view 2ω /(″) /mrad 1km 123.46 107.41 230.87 1.12 2km 95.10 100.55 195.65 0.94 3km 105.24 96.32 201.56 0.87 4km 97.01 72.89 169.90 0.76 通过以上可以看出,1km, 2km, 3km, 4km不同通信距离下,在探测器灵敏度为固定-30dBm时,测得激光通信接收视场随着距离的增大而逐渐减小,与能量余量与通信距离的变化趋势相同,符合理论通信视场情况。利用该方法对视场角的测量精度高,可以实现更远距离下的通信接收视场测量。
4. 结论
便携式激光通信通信的视场角区别于传统视场角测试,其特点是范围小,测量要求精度高、对准难度大。本文中基于以上特点和难点,提出了基于便携式激光通信视场角测量的方法,测试装置组成包括高精度自准直仪、准直平行光源以及方位俯仰工装。以1km, 2km, 3km, 4km距离为例,计算了链路能量,并对实际系统进行了视场角测量,在探测器灵敏度-30dBm时的通信视场角分别为1.12mrad,0.94mrad,0.87mrad和0.63mrad。该方法的提出解决了便携式激光通信视场角的测量问题,可以测量不同通信距离下的接收视场角范围,并可扩展应用于其它领域的视场角测量。
-
Table 1 Prediction of portable laser communication link
link distance/km 1 2 3 4 emit energy Pt/dBm 15 emission path loss Pe/dB 1 received path loss Pa/dB 1 geometric loss Lg/dB 19 25.1 28.6 31.1 image receiving energy/dBm -6 -12.1 -15.6 -18.1 detector sensitivity Pd/dBm -30 link margin Pγ/dB 24 17.9 14.4 11.9  下载: 导出CSV
下载: 导出CSV
Table 2 Data table of field angle
distance/dBm upward motionangle/(″) downward motionangle/(″) field of view 2ω /(″) /mrad 1km 123.46 107.41 230.87 1.12 2km 95.10 100.55 195.65 0.94 3km 105.24 96.32 201.56 0.87 4km 97.01 72.89 169.90 0.76
下载: 导出CSV
-
[1] ZHAO Y J, WANG J A, REN X Ch, et al. Effect of the atmosphere turbulence on the bit error rate of laser communication among the ships[J]. Laser Technology, 2010, 34(2): 261-264(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTOTAL-JGJS201002033.htm
[2] DENG P, YUAN X H, KAVEHRAD M. Off-axis catadioptric fisheye wide field-of-view optical receiver for free space optical communications[J]. Optical Engineering, 2012, 51(6):063002. DOI: 10.1117/1.OE.51.6.063002
[3] ZHAO X, LIU Y Q, TONG Sh F. Line-of-sight initial alignment model and test in dynamic space laser communication[J]. Chinese Journal of Lasers, 2014, 41(5): 0505009(in Chinese). DOI: 10.3788/CJL
[4] ZHAO X, LI Y R, LIU Y Q. Coarse tracking line of sight calibration technology in laser communication system[J]. Optical Communication Technology, 2017, 41(2): 55-57 (in Chinese). http://en.cnki.com.cn/Article_en/CJFDTOTAL-GTXS201702016.htm
[5] KE X Zh, LI Sh Y. Experimental study on optical axis alignment of the optical antenna under the spot broken[J]. Acta Photonica Sinica, 2017, 46(4): 0406002(in Chinese). DOI: 10.3788/gzxb
[6] ZHANG Y F. Dissertation for the master degree in engineering[D]. Harbin: Harbin Institute of Technology, 2013: 2-6(in Chinese).
[7] WANG J A, ZHAO Y J, CHEN D, et al. Effects of turbulence sizes on the error rate of atmospheric laser communication system [J]. Infrared and Laser Engineering, 2009, 38(4): 654-659(in Chinese). http://en.cnki.com.cn/article_en/cjfdtotal-hwyj200904020.htm
[8] RUBEN B R, ANTONIO G Z, BEATRIZ C V, et al. Impact of nonzero boresight pointing error on ergodic capacity of MIMO FSO communication systems[J]. Optics Express, 2016, 24(4): 3513-3534. DOI: 10.1364/OE.24.003513
[9] AHMED A F. Outage capacity optimization for free-space optical links with pointing errors[J]. Journal of Lightwave Technology, 2007, 25(7):1702-1710. DOI: 10.1109/JLT.2007.899174
[10] LIU Sh T, CAO Y, PENG X F, et al. PID control of optical axis stabilization for airborne laser communication based on fuzzy neural network[J]. Laser Technology, 2017, 41(4): 606-610(in Chinese). http://www.jgjs.net.cn/EN/abstract/abstract15634.shtml
[11] LIU H Zh, LIU L R. Research of the optical coupling unit for the transmitting terminal of intersatellite optical communication system[J]. Laser Technology, 2007, 31(4): 415-418(in Chinese). http://en.cnki.com.cn/article_en/cjfdtotal-jgjs200704024.htm
[12] LI Zh, FAN W D, LI Y. Research on the optical parameter testing technique of the semiconductor laser fuze[J]. Guidance & Fuze, 2013, 34(2): 13-18(in Chinese). DOI: 10.1021/jz401896k
[13] DI H G, WANG J Y, FANG K M, et al. Research on laser altimeters field of view[J]. Journal of Infrared and Millimeter Waves, 2009, 28(4): 285-288(in Chinese). DOI: 10.3724/SP.J.1010.2009.00285
[14] LI G. The design of test system for the FOV of infrared optical lens[D]. Changchun: Changchun University of Science and Technology, 2014: 1-4(in Chinese).
[15] TAN Z J, CHEN H Q, KANG J R. Research and test of receiver module in laser fuze[J]. Acta Photonica Sinica, 2009, 38(11): 2742-2746(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTOTAL-GZXB200911005.htm
[16] FENG R P, ZHONG D P, FA Y B. Data processing on shooting and receiving view angle measurement of laser guidance with three-axis test table[J]. Journal of Chinese Inertial Technology, 2004, 12(4): 65-69(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTOTAL-ZGXJ200404014.htm
[17] CHEN Sh Sh, OU Q Y, GAO W, et al. Design of laser receiver with FOV[J]. Journal of Applied Optics, 2009, 30(6):1051-1055(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTOTAL-YYGX200906037.htm
[18] ZHANG X, DU Zh Y, QIAO Y F, et al. Study on linear field of strap down semi-active laser seeker[J]. Chinese Optics, 2005, 8(3): 415-421(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTotal-ZGGA201503016.htm
[19] ZHANG J L, WANG Zh L, JIANG F, et al. Optical axis adjustment for multiple field TV Sight[J]. Journal of Applied Optics, 2004, 35(3): 381-385(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTotal-YYGX201403006.htm
[20] LI G, ZHOU B, SUN X H, et al. Handy method detect divergence angle and optical axis parallelism of laser guidance device[J]. Optical Technique, 2004, 30(5): 628-630(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTOTAL-GXJS200405037.htm
-
期刊类型引用(2)
1. 曹明静,刘娜,张冠雄. 激光通信系统中的非平稳信号预测模型. 激光杂志. 2023(08): 166-171 .  百度学术
百度学术
2. 王芳,李铭. 高速保密通信的激光物理随机数发生器构建. 激光杂志. 2019(12): 114-117 . 百度学术
其他类型引用(2)
计量
- 文章访问数: 3
- HTML全文浏览量: 0
- PDF下载量: 13
- 被引次数: 4