
Simulation and study on maximum permitted noise of airborne long-range laser range-finders
-
摘要: 为了提高机载远程激光测距机接收系统设计的可行性,从激光测距方程出发,分析了最小探测灵敏度与测程的关系。对回波频谱特性、探测模块带宽和放大器带宽进行了仿真,计算了回波信号的放大倍数,推算出主放大器输出信号的大小。依据高斯白噪声模型和主放大器输出信号值,推算了激光测距接收电路的最大允许输入噪声值。设计了电路并进行了试验测试。结果表明,激光接收灵敏度与理论值的偏差为5.7%,消光比法对应空中小目标最大测程与理论值的偏差仅为1.5%。该噪声分析方法对机载远程激光测距机的接收系统设计具有一定的指导意义。Abstract: In order to improve the design feasibility of receiving system for an airborne laser rangefinder, the maximum allowable input noise level was analyzed according to the parameters of the maximum range and signal-to-noise ratio threshold. Noise was closely related to the sensitivity of laser reception. Based on laser ranging equation, the relationship between the minimum detection sensitivity and detection range was analyzed. The characteristics of echo spectrum, the bandwidth of detection module and amplifier were simulated. The magnification of echo signal and the value of output signal of main amplifier were calculated. At the same time, according to Gaussian white noise model and output signal value of main amplifier, the maximum allowable input noise value of laser ranging receiving circuit was calculated. The circuit was designed and tested. The results show that the deviation between laser reception sensitivity and theoretical value is 5.7%. The deviation between the maximum value of extinction ratio method and the theoretical value is only 1.5%. The method of noise analysis has important guiding significance for the design of receiving system of airborne long-range laser range-finders.
-
Keywords:
- laser technique /
- airborne laser ranging /
- noise /
- detection sensibility /
- frequency spectrum /
- bandwidth
-
-
![]()
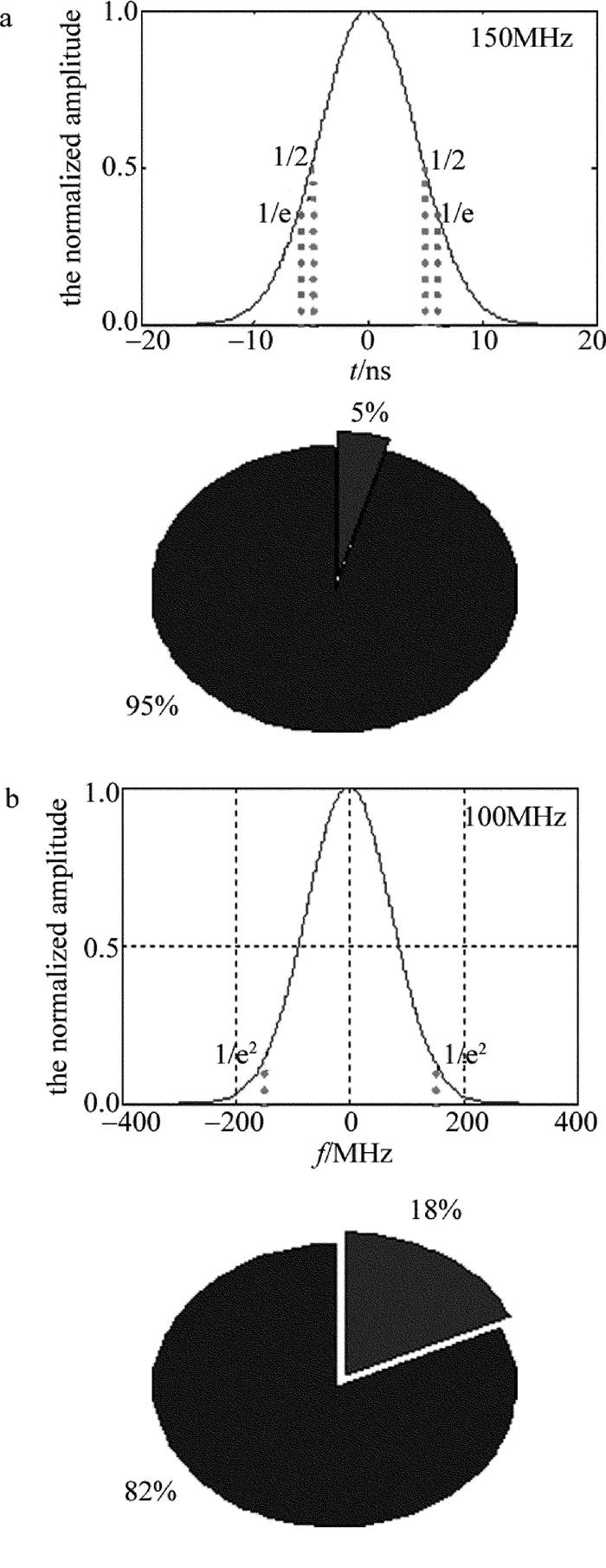
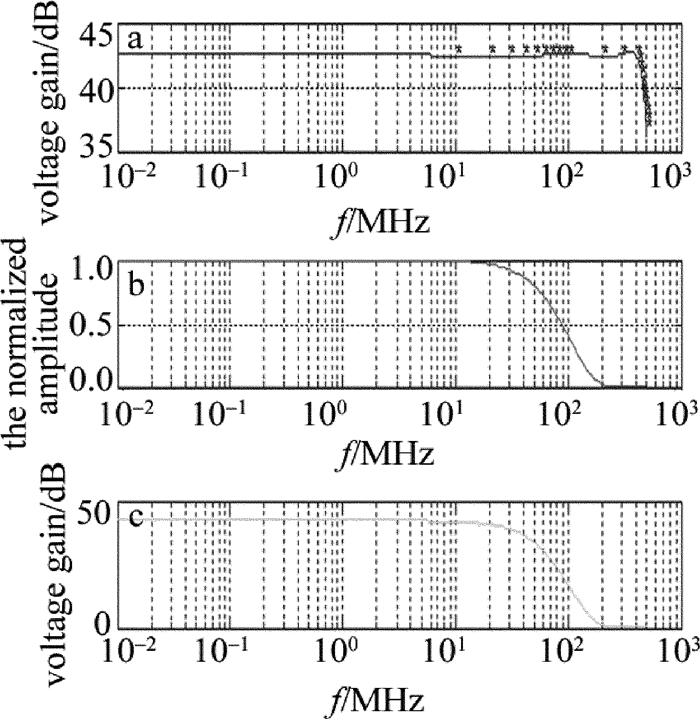
Figure 6. Simulation of gain versus frequency of main amplifier
a—voltage gain b—the normalized amplitude c—simulation of voltage gain
-
[1] AN Y Y, ZENG X D. Photoelectricity detection principle[M]. Xi'an:Xidian University Publishing House, 2004:42-45(in Chinese).
[2] FREDERIC L. Low noise optical receiver using Si APD[J].SPIE, 2009, 7212:523-534. http://d.old.wanfangdata.com.cn/NSTLHY/NSTL_HYCC029939293/
[3] MA J L, FAN X T, YAN D K, et al. Design of laser range finding receiver circuit based on cooling-APD[J]. Infrared and Laser Engineering, 2013, 42(8):2041-2044(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hwyjggc201308019
[4] GUO S, DING Q X, YAN Y. Noise suppression technologies used for avalanche photodiode[J].Electronics Optics & Control, 2012, 19(3):69-73(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTotal-DGKQ201203018.htm
[5] FENG L L. Method of simulated testing of pulse laser rangefinder[J].Infrared and Laser Engineering, 2003, 32(2):127-129(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hwyjggc200302005
[6] SUN Zh W, LIU Y J. Design of a new performance testing instrument of laser rangefinders[J]. Laser Technology, 2011, 35(6):792-794(in Chinese). http://www.en.cnki.com.cn/Article_en/CJFDTOTAL-JGJS201106020.htm
[7] WU G X, DUAN F J, GUO H T. Optoelectronic heterodyne mixing and parameter optimization of avalance photodiodes[J].Laser Technology, 2015, 39(6):802-805(in Chinese). http://www.opticsjournal.net/abstract.htm?id=OJ151130000300VsYu25
[8] LI J Zh. Handbook of optics(volume two)[M]. Xi'an:Shaanxi Science and Technology Press, 2010:1802(in Chinese).
[9] EXCELITAS Co. A user guide-understanding avalanche photodiode for improving system performance[EB/OL].(2017-12-11).http://www.excelitas.com/downloads/app_avalanchephotodiodesusersguide.pdf.
[10] PROKE S. Influence of temperature variation on optical receiver sensitivity and its compensation[J]. Radio Engineering, 2007, 16(3):13-18. http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_f22542e2f02c93ec41c8e2cff9400ace
[11] EXCELITAS Co. High-speed low-light analog APD receiver modules LLAM Series. www.excelitas.com.[EB/OL]. (2017-12-11).http://www.excelitas.com/Downloads/DTS_LLAM.pdf.
[12] ANALOG DEVICES Inc. AD8367 www.analogy.com.[EB/OL]. (2018-1-16).http://www.analog.com/media/en/technical-documentation/data-sheets/AD8367.pdf.
-
期刊类型引用(4)
1. 张蔚. 基于激光干涉光刻技术的产品防伪包装设计研究. 激光杂志. 2024(04): 248-253 .  百度学术
百度学术
2. 邓国辉. 信道时变性对无线激光通信系统的性能影响研究. 激光杂志. 2022(04): 140-143 . 百度学术
3. 李文杰. 基于激光扫描的车联网监控系统设计. 激光杂志. 2020(05): 178-182 . 百度学术
4. 邹煜,毛月祥,王淑青,张子蓬. 多模态红外图像的快速融合系统设计. 激光杂志. 2019(03): 79-83 . 百度学术
其他类型引用(1)
 下载:
下载:

计量
- 文章访问数: 3
- HTML全文浏览量: 6
- PDF下载量: 6
- 被引次数: 5