
Review of high dynamic range infrared image enhancement algorithms
-
摘要: 红外成像系统设计中,一般采用宽动态的采集电路以获得丰富的细节信息,当前大部分的显示设备都只有8位,所以将宽动态图像压缩成低动态图像同时保持尽可能多的信息成为重点。研究了当前主流的宽动态红外图像处理算法,分析了映射、图像分层和梯度域3类算法的优缺点,实现了3类算法中的经典算法,并用同一张红外图片进行对比分析,提出了各类算法的改进意见。图像分层算法要在抑制光晕和梯度反转的情况下降低时间复杂度;梯度域算法需在进一步提高细节信息的情况下抑制背景噪声。Abstract: In order to obtain rich image detail information, a wide dynamic acquisition circuit is often used in an infrared imaging system. However, most of the display devices are only 8 bits, how to compress wide dynamic images into low dynamic images and preserve detail information as much as possible is one of the key technologies of infrared image display. Current mainstream infrared image processing algorithms, such as mapping, image stratification and gradient domain are introduced, and the advantages and disadvantages of the 3 algorithms are analyzed. Contrast analysis is made with the same infrared image, and the improved opinions of all the algorithms are proposed. Image stratification algorithm needs to reduce time complexity in the case of inhibition of halo and gradient inversion. Gradient domain algorithm needs to suppress background noise and then the details are further improved.
-
-
![]()
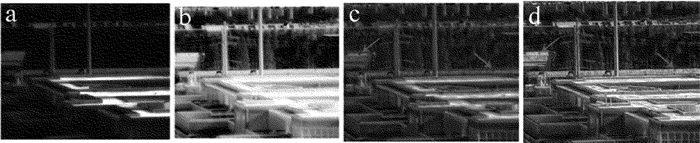
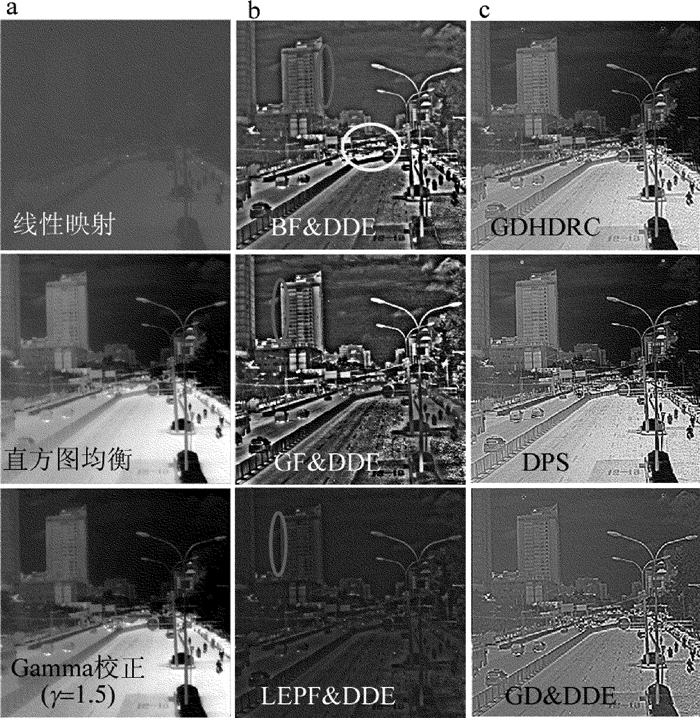
图 7 基于图像分层和基于梯度域的部分算法效果展示[12]
a—原始图像b—基于梯度域的宽动态范围压缩和细节增强算法c—基于引导滤波的宽动态图像增强算法d—基于局部边界保持滤波器的宽动态图像增强算法
表 1 各类算法的运行时间
算法类 典型算法 运行时间/s 基于映射 线性映射 0.0040 Gamma曲线校正 0.1780 直方图投影 0.0004 基于图像分层 BF&DDE 2.2360 GF&DDE 0.6590 LEPF&DDE 0.0310 基于梯度域 GDHDRC 0.1100 DPS 0.3450 GD&DDE 3.2250  下载: 导出CSV
下载: 导出CSV
表 2 各类算法的特点对比
算法类 典型算法 优点 缺点 基于映射 线性映射、Gamma曲线校正、直方图投影 实现简单、复杂度低 细节增强效果一般 基于图像分层 BF&DDE, GF&DDE, LEPF&DDE 细节增强效果好 易产生光晕和梯度反转,复杂度较大 基于梯度域 GDHDRC, DPS, GD&DDE 细节增强效果较好,抑制光晕、梯度反转、模糊、过饱和等 算法复杂度大,背景噪声较大
下载: 导出CSV
-
[1] PIZER S M, AMBURN E P, AUSTIN J D, et al. Adaptive histogram equalization and its variations[J]. Computer Vision Graphics & Image Processing, 1987, 39(3):355-368. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0214125014/
[2] ZUIDERVELD K. Contrast limited adaptive histogram equalization[M]. San Diego, USA:Academic Press Professional, Inc., 1994:474-485.
[3] VICKERS V E. Plateau equalization algorithm for real-time display of high-quality infrared imagery[J]. Optical Engineering, 1996, 35(7):1921-1926. DOI: 10.1117/1.601006
[4] BRANCHITTA F, DIANI M, CORSINI G. New technique for the visualization of high dynamic range infrared images[J]. Optical Engineering, 2009, 48(9):096401. DOI: 10.1117/1.3216575
[5] DURAND F, DORSEY J. Fast bilateral filtering for the display of highdynamic range images[J]. ACM Transactions Graphics, 2002, 21(3):257-266. http://people.csail.mit.edu/fredo/PUBLI/Siggraph2002/
[6] BAE S, PARIS S. Two-scale tone management for photographic look[J]. ACM Transactions Graphics, 2006, 25(3):637-645. DOI: 10.1145/1141911
[7] ZUO C, CHEN Q, REN J. Display and detail enhancement for high-dynamic-range infrared images[J]. Optical Engineering, 2011, 50(12):895-900. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=17f2cb0da1a9a21fe4e450270e4e629c
[8] ANDERSON G L, NETRAVALI A N. Image restoration based on a subjective criterion[J]. IEEE Transactions on Systems Man & Cybernetics, 1976, 6(12):845-853. DOI: 10.1109-TSMC.1976.4309481/
[9] KATSAGGELOS A K, BIEMOND J, SCHAFER R W, et al. A regularized iterative image restoration algorithm[J]. IEEE Transactions on Signal Processing, 1991, 39(4):914-929. DOI: 10.1109/78.80914
[10] HE K, SUN J, TANG X. Guided image filtering[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2013, 35(6):1397-1409. http://d.old.wanfangdata.com.cn/Periodical/zgtxtxxb-a201207002
[11] LIU N, ZHAO D X. Detail enhancement for high-dynamic-range infrared images based on guided image filter[J]. Infrared Physics & Technology, 2014, 67:138-147. http://d.old.wanfangdata.com.cn/Periodical/gxygdjs201401021
[12] FARBMAN Z, FATTAL R, LISCHINSKI D. Edge-preserving decompositions for multi-scale tone and detail manipulation[J]. ACM Transactions on Graphics, 2008, 27(3):1-10. DOI: 10.1145-1360612.1360666/
[13] SONG Q, WANG Y H, BAI K. High dynamic range infrared images detail enhancement based on local edge preserving filter[J]. Infrared Physics & Technology, 2016, 77:464-473. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=15a3e15f77a6da1b7e6193a58666d4dd
[14] GU B, LI W, ZHU M, et al. Local edge-preserving multiscale decomposition for high dynamic range image tone mapping[J]. IEEE Transactions on Image Processing, 2012, 22(1):70-79. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=f76bf71aa65cba8a6fc99bf3fd0eb154
[15] FATTAL R, LISCHINSKI D, WERMAN M. Gradient domain high dynamic range compression[C]//Conference on Computer Graphics & Interactive Techniques: Proc of 29th Annual Co Conference on Computer Graphics & Interactive Techniques. New York, USA: ACM Press, 2002: 249-256.
[16] ZHANG F F, XIE W, MA G R, et al. High dynamic range compression and detail enhancement of infrared images in the gradient domain[J]. Infrared Physics & Technology, 2014, 67:441-454. http://www.sciencedirect.com/science/article/pii/S1350449514001819
[17] KIM J H. Novel contrast enhancement scheme for infrared image using detail-preserving stretching[J]. Optical Engineering, 2011, 50(7):077002. DOI: 10.1117/1.3597639
[18] SHEWCHUK J R. An introductionto the conjugate gradient method without the agonizing pain[D]. Pittsburgh, USA: Carnegie Mellon University, 1994: 94-125.
[19] ZHANG F, XIE W, MA G, et al. High dynamic range compression and detail enhancement of infrared images in the gradient domain[J]. Infrared Physics & Technology, 2014, 67:441-454. http://www.sciencedirect.com/science/article/pii/S1350449514001819


计量
- 文章访问数: 22
- HTML全文浏览量: 0
- PDF下载量: 4