
Technical research of 3-D wind lidar
-
摘要: 为了精确测量3维大气风场的实时状态以应对低空风切变在飞行器起降过程中给飞行器带来的多种问题,通过DBS四波束风场反演原理研制出一款小型3维激光测风雷达。对大气风场展开测风试验并获取风场数据,并与其它标准测风设备的数据对比分析。结果表明,雷达在晴天和阴天的天气状况下均可以实现对大气风场的有效测量,风速均方根误差0.42m/s,风向均方根误差5.33°。该雷达精准度高、稳定性好,对风切变预警、中低空大气风场预报及飞行器飞行通道的风场测量具有重要作用。Abstract: In order to accurately measure the 3-D real-time atmospheric wind field to cope with the problems of low-level wind shear during aircraft take-off and landing, a compact 3-D Doppler wind lidar was developed by using Doppler beam swinging (DBS) principle. The wind field data obtained by the lidar were compared with the anemometry data with the other standard equipments. It turned out that the effective measurement of atmospheric wind field was achieved by the lidar under both sunny and cloudy weather conditions. The root mean square errors of wind speed and wind direction were 0.42m/s and 5.33° respectively. The lidar, with high precision and good stability, plays an important role for wind shear warning, the forecast of low-level atmospheric wind field and wind field measurement of aircraft flight channel.
-
Keywords:
- laser technique /
- wind lidar /
- 3-D scanning /
- coherent detection /
- Doppler /
- contrast of wind field
-
-
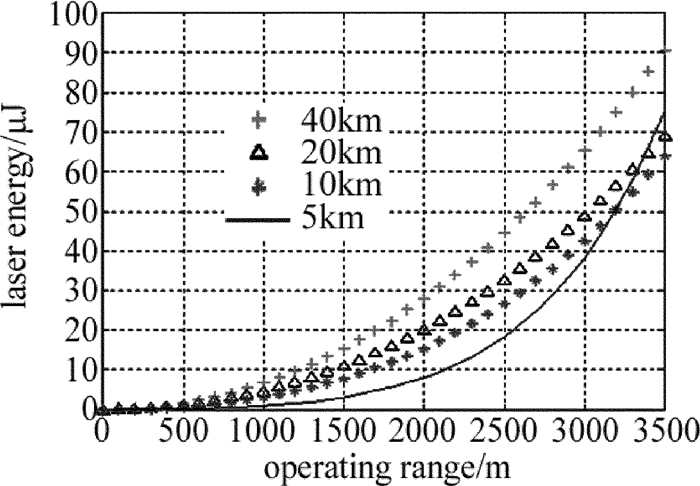
![]()
Figure 5. The relationship between laser energy and operating range at diffe-rent visibilities
![]()
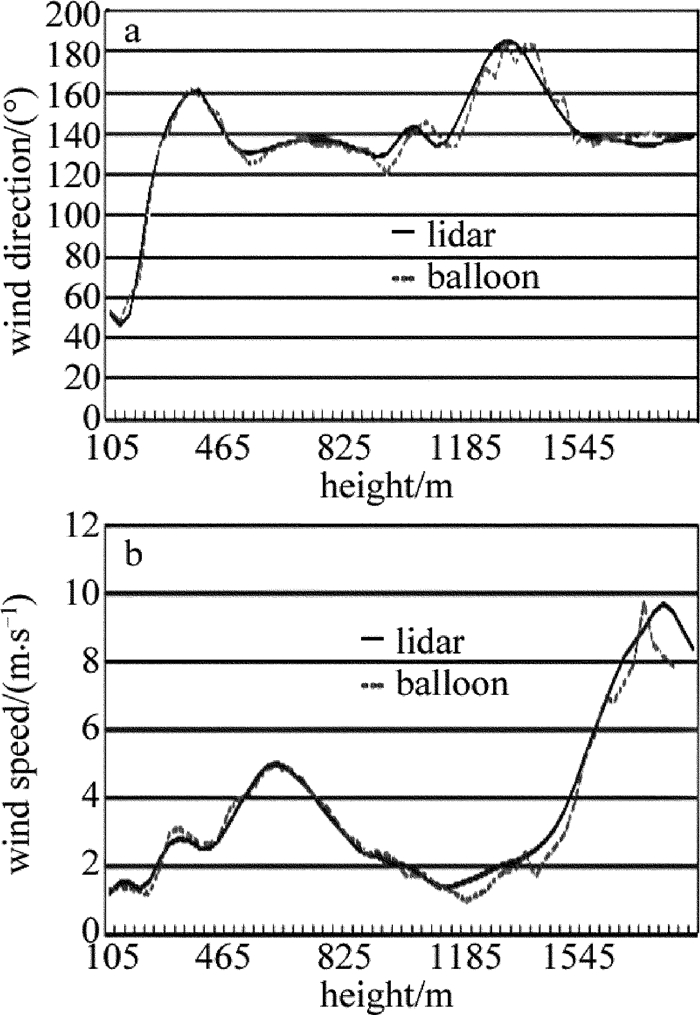
Figure 6. The relationship of wind direction, wind speed and height measured by wind lidar and theodolite balloons
![]()
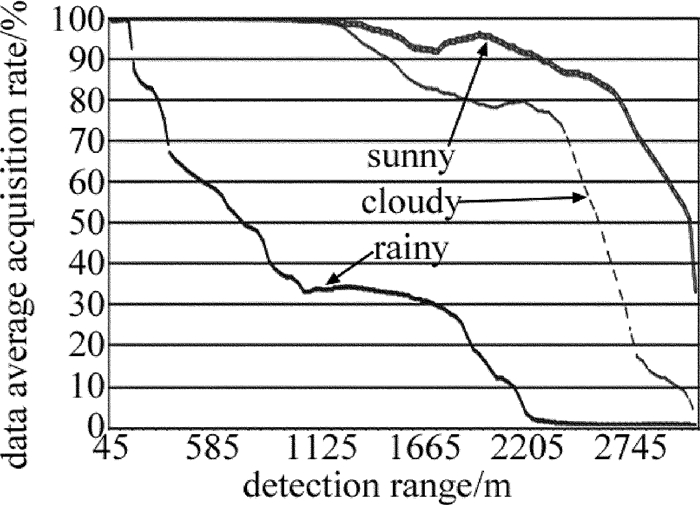
Figure 7. Average data acquisition rate of 3-D wind lidarunder different weather conditions
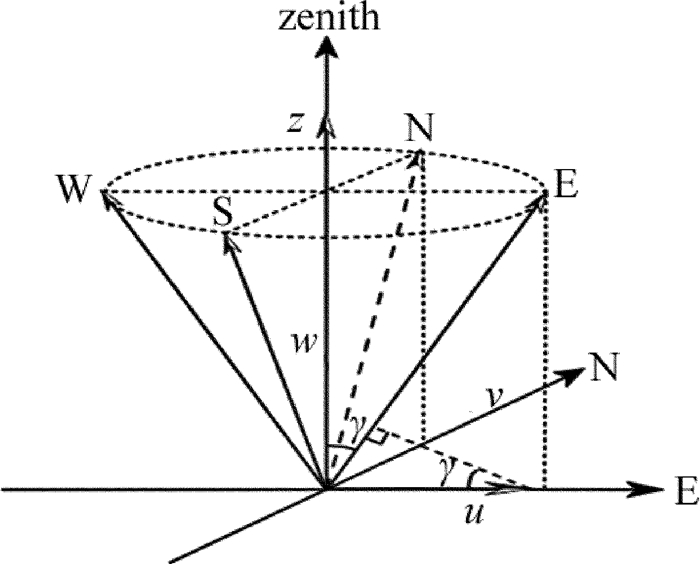
Table 1 The relationship among lidar's wind profile scanning angle, wind speed and direction
γ/
(°)wind
velocity
error/
(m·s-1)wind direction error/(°) (5~10)
m/s(10~20)
m/s(20~30)
m/s(30~40)
m/s(50~60)
m/s10 0.61 7.01 3.50 1.75 1.17 0.70 15 0.41 4.70 2.35 1.18 0.78 0.47 20 0.31 3.56 1.78 0.89 0.59 0.36 25 0.25 2.88 1.44 0.72 0.48 0.29 30 0.21 2.43 1.22 0.61 0.41 0.24  下载: 导出CSV
下载: 导出CSV
Table 2 The main parameters of 3-D wind lidar
parameters numerical value working wavelength 1550nm detection range 45m~3km range resolution 30m/50m/75m/100m angular resolution 0.1° scan range(azimuth/pitch) 0°~360°/0°~90° scanning mode DBS/PPI/RHI/CAPPI accuracy of wind speed 0.2m/s(radial), 0.5m/s accuracy of wind direction 5° wind speed range -60m/s~+60m/s power consumption of lidar 200W(24V, DC)
下载: 导出CSV
-
[1] WANG Q M, GUO L L. Development of lidar in detection of low altitude wind shear[J].Laser & Infrared, 2012, 42(12):1324-1328(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTotal-JGHW201212003.htm
[2] SHUN Ch M, LAU S Y. Implementation of a doppler light detection and ranging(lidar) system for the hong kong international airport[C]//International Civil Aviation Organization 10th Conference on Aviation, Range and Aerospace Meteorology of the American Meteorological Society(AMS). Montreal, Canada: International Civil Aviation Organization, 2002: CNS/MET SG/8-IP/3.
[3] CARIOU J P, CANAT G. Fiber lasers:new effective sources for coherent lidars[J]. Proceedings of the SPIE, 2007, 6750:675007. DOI: 10.1117/12.741584
[4] ASAKA K, YANAGISAWA T, HIRANO Y. 1.5μm eye-safe cohe-rent lidar system for wind velocity measurement[J]. Proceedings of the SPIE, 2001, 4153:321-328. DOI: 10.1117/12.417063
[5] ODA R, IWAI H, MURAYAMA Y, et al. Doppler lidar observations of the coherent structures in the internal boundary layer[C]//American Meteorological Society (AMS) Ninth Symposium on the Urban Environment. New York, USA: American Meteorological Society (AMS), 2010: 10.1.
[6] PEARSON G N, EACOCK J R. Fiber-based coherent pulsed Doppler lidar for atmospheric monitoring[J]. Proceedings of the SPIE, 2002, 4484:51-57 DOI: 10.1117/12.452799
[7] ZHU X P, LIU J W, DIAO W F, et al. Study of coherent Doppler lidar system[J]. Infrared, 2012, 33(2):8-12(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTOTAL-HWAI201202004.htm
[8] LI Y C, WANG C H, QU Y, et al. Numerical investigation of multi-beam laser heterodyne measurement with ultra-precis ion for linear expansion coefficient[J]. Chinese Physics, 2011, B20(1):014208. http://www.cnki.com.cn/Article/CJFDTotal-ZGWL201101060.htm
[9] LI Y C, WANG C H. A method of measuring micro-impulse with torsion pendulum based on multi-beam laser heterodyne[J]. Chinese Physics, 2012, B21(2):020701. http://www.cqvip.com/QK/85823A/201202/40768536.html
[10] LI Y C, YANG Y L, XIA X S, et al. The method for dual-beam laser heterodyne ultra-precision measurement of the glass thickness[J]. Acta Physica Sinica, 2009, 58(8):5473-5478(in Chinese). http://www.opticsinfobase.org/abstract.cfm?URI=CLEOPR-2009-TuE1_4
[11] LI Y C, GAO L, CONG H F, et al. Optimum optical local oscillator power leves impact on signal-to-noise ratio in heterodyne[C]//IEEE International Symposium on Photonics and Optoelectronics(SOPO 2010). New York, USA: IEEE, 2010: 1-3.
[12] LI Y C, WANG C H, GAO L, et al. Design and experimenta l investigation of a 2.05μm single mode fiber coupler with high coupling efficiency[C]//IEEE 2010 ASOMT & 10th CRST. New York, USA: IEEE, 2010: 217-220.
[13] LIU Zh Sh, CHEN Zh, YU C R, et al. Doppler wind lidar:from vehicle-mounted to space-borne[J]. Journal of Atmospheric and Environmental Optics, 2015, 10(2):126-138(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/dqyhjgxxb201502005
[14] CHEN Y, ZHOU B Zh, TAN J, et al. Research and application of airborne laser Doppler wind lidars[J].Laser Technology, 2011, 35(6):795-799(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTotal-JGJS201106021.htm
[15] FENG L T, GUO H Q, CHEN Y, et al. Experiment of all fiber Doppler lidar at 1.55μm[J]. Infrared and Laser Engineering, 2011, 40(5):844-847(in Chinese).
[16] LI C, LIU J W, ZHAO P E, et al. Correction method of tilt wind field of mobile wind lidar[J]. Laser Technology, 2017, 41(3):385-390(in Chinese). http://www.jgjs.net.cn/EN/abstract/abstract15600.shtml
计量
- 文章访问数: 25
- HTML全文浏览量: 2
- PDF下载量: 12