
Rapid ship detection in remote sensing images based on visual saliency model
-
摘要: 为了降低传统高分辨率海面遥感图像舰船目标检测方法的计算复杂度,提高检测速度,在舰船目标检测中引入了基于直方图对比度的视觉显著模型和空间降维算法,提出一种新的高分辨率海面遥感图像舰船目标快速检测算法。首先对高分辨率遥感图像进行空间降维,然后计算降维图的视觉显著图,突出感兴趣目标区域,最后利用最大类间方差法分割视觉显著图以获取舰船目标候选区域。结果表明,目标检测所消耗的时间减小为原来的10%~12%,弱化了复杂海面纹理背景对目标检测的影响。该研究提高了高分辨率遥感图像舰船目标的检测效率。Abstract: In order to reduce the computational complexity of ship target detection methods for sea surface remote sensing images of traditional high resolution and improve the speed of detection, combined with visual salience algorithm based on histogram contrast and spatial dimension reduction algorithm, a new ship target fast detection algorithm for sea surface remote sensing images of high resolution was proposed.Firstly, spatial dimension reduction of high resolution remote sensing images was carried out. The saliency map was calculated and the interest area of the target area was highlighted. At last, the visual salient image was segmented by the method of maximum inter class variance to obtain the candidate region of the ship target. The results show that the time consumed by the target detection is reduced to 10%~12% of the original.The influence of complex sea surface texture background on target detection is weakened.The research improves ship target detection efficiency for high resolution remote sensing images.
-
Keywords:
- image processing /
- ship detection /
- visual salience /
- spatial dimension reduction /
- remote sensing
-
-
![]()
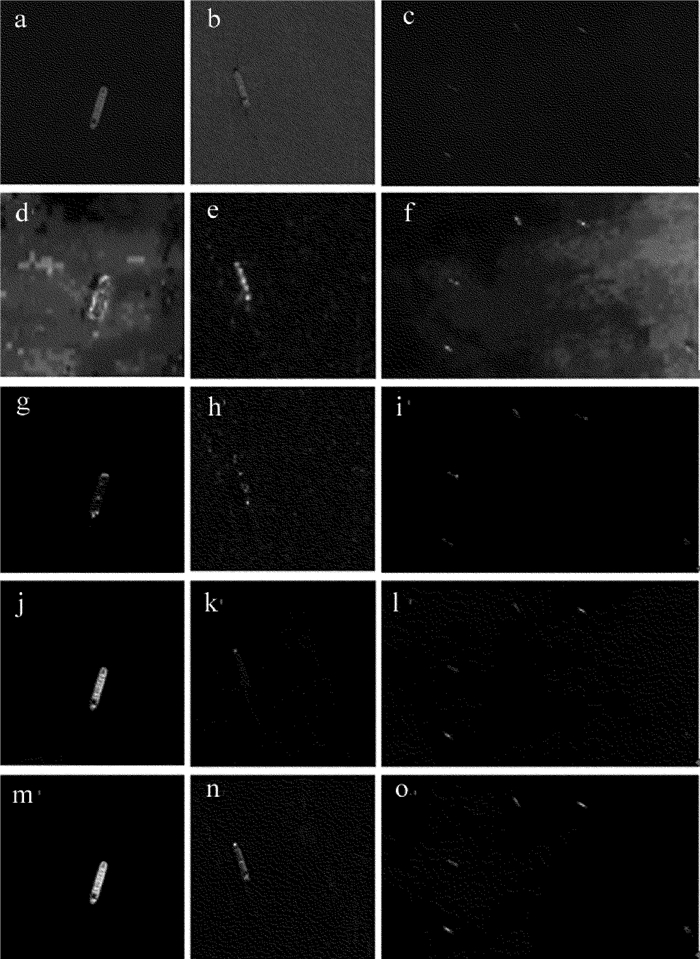
Figure 4. Different saliency map
a~c—original image d~f—Itti saliency map g~i—SR saliency map j~l—FT saliency map m~o—HC saliency map
![]()
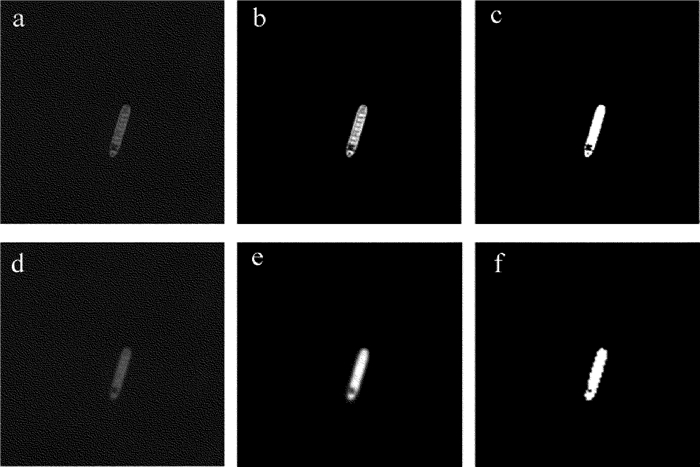
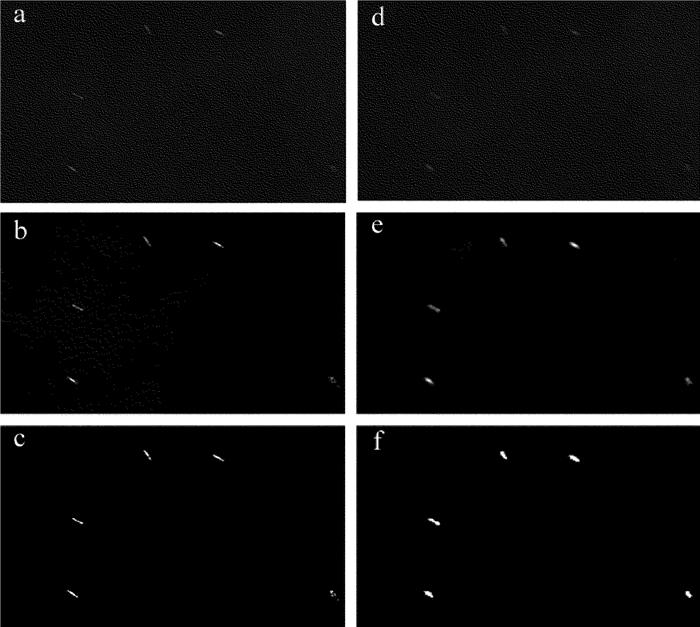
Figure 5. Comparison of ship detection results before and after dimension reduction of Fig. 4a
a—original image b—HC saliency map c—the result of segmentation d—the reduced dimension image e—HC saliency map after dimension reduction f—the result of segmentation after dimension reduction
![]()
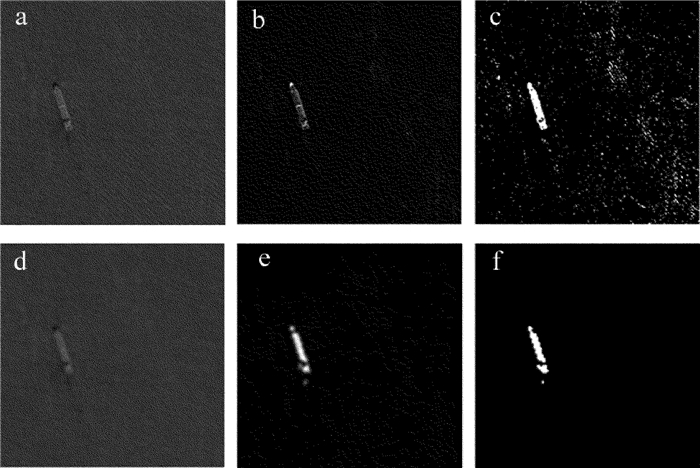
Figure 6. Comparison of ship detection results before and after dimension reduction Fig. 4b
a—original image b—HC saliency map c—the result of segmentation d—the reduced dimension image e—HC saliency map after dimension reduction f—the result of segmentation after dimension reduction
![]()
Figure 7. Comparison of ship detection results before and after dimension reduction of Fig. 4c
a—original image b—HC saliency map c—the result of segmentation d—the reduced dimension image e—HC saliency map after dimension reduction f—the result of segmentation after dimension reduction
Table 1 The processing time of different algorithms
the processing time/ms Itti SR FT H the first image
(512×512)2271.4 126.1 106.8 64.7 the second image
(512×512)2390.0 129.2 110.3 69.5 the third image
(1024×600)4895.2 286.9 235.7 106.1  下载: 导出CSV
下载: 导出CSV
Table 2 Comparison of target detection time
original image/ms Gaussian dimension reductionimage/ms the first image 73.4 8.9 the second image 78.4 9.1 the third image 121.9 12.6
下载: 导出CSV
-
[1] ZHANG Zh. A study on harbor target recognition in high resolution optical remote sensing image[D].Hefei: University of Science and Technology of China, 2005: 79-84(in Chinese).
[2] WANG M, LUO J Ch, MING D P. Extract ship targets from high spatial resolution remote sensed imagery with shape feature[J]. Geomatics and Information Science of Wuhan University, 2005, 30(8):685-688(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=whchkjdxxb200508007
[3] CHU Zh L, WANG Q H, CHEN H L, et al. Ship auto detection method based on minimum error threshold segmentation[J]. Computer Engineering, 2007, 33(11):239-241(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjgc200711086
[4] XIAO L P, CAO J, GAO X Y. Detection for ship targets in complicated background of sea and land[J]. Opto-Electronic Engineering, 2007, 34(6):6-10(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gdgc200706002
[5] ZHAO Y H, WU X Q, WEN L Y, et al. Ship target detection scheme for optical remote sensing images[J]. Opto-Electronic Engineering, 2008, 35(8):102-106(in Chinese). http://cn.bing.com/academic/profile?id=dbaa175021e019edc35cfd41b95c9773&encoded=0&v=paper_preview&mkt=zh-cn
[6] XU J, XIANG J Y, ZHOU X, et al. A target segmentation algorithm based on feature field[J]. Infrared and Laser Engineering, 1998, 27(2):21-24(in Chinese). http://proceedings.spiedigitallibrary.org/mobile/proceeding.aspx?articleid=972077
[7] ZHU C, ZHOU H, WANG R, et al. A novel hierarchical method of ship detection from spaceborne optical image based on shape and texture features[J]. IEEE Transactions on Geoscience & Remote Sensing, 2010, 48(9):3446-3456. http://ieeexplore.ieee.org/document/5454348/
[8] WANG F Ch, ZHANG M, GONG L M, et al. Fast detection algorithm for ships under the background of ocean[J].Laser & Infrared, 2016, 46(5):602-606(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jgyhw201605019
[9] ZHANG L B, WANG P F. Fast detection of regions of interest in high resolution remote sensing image[J].Chinese Journal of Lasers, 2012, 39(7):714001(in Chinese). DOI: 10.3788/CJL
[10] ITTI L, KOCH C, NIEBUR E. A model of saliency-based visual attention for rapid scene analysis[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 1998, 20(11):1254-1259. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ccf9901cbf11daa9b1aaa3928f527cbf
[11] HOU X, ZHANG L. Saliency detection: a spectral residual approach[C]//Computer Vision and Pattern Recognition CVPR 2007.New York, USA: IEEE, 2007: 1-8.
[12] ACHANTA R, HEMAMI S, ESTRADA F, et al. Frequency-tuned salient region detection[C]//Computer Vision and Pattern Recognition CVPR 2009.New York, USA: IEEE, 2009: 1597-1604.
[13] CHENG M M, ZHANG G X, MITRA N J, et al. Global contrast based salient region detection[C]//IEEE Conference on Computer Vision and Pattern Recognition. New York, USA: IEEE, 2011: 409-416.
[14] CHENG M M. Saliency and similarity detection for image scene analysis[D].Beijing: Tsinghua University, 2012: 31-53(in Chinese).
[15] WEI Y. Research on image salient region detection methods and applications[D].Ji'nan: Shandong University, 2012: 35-46(in Chinese).
[16] WANG Y W, LIANG Y Y, WANG Zh H. Otsu image threshold segmentation method based on new genetic algorithm[J]. Laser Technology, 2014, 38(3):364-367(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201706010
[17] WEI X F, LIU X. Research of image segmentation based on 2-D maximum entropy optimal threshold[J]. Laser Technology, 2013, 37(4):519-522(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jgjs201304023
[18] ZHANG J B, YANG H X, ZHOU T T, et al.Improved segmentation method of 2-D Otsu infrared image[J]. Laser Technology, 2014, 38(5):713-717(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jgjs201405029

计量
- 文章访问数: 7
- HTML全文浏览量: 0
- PDF下载量: 16