
Influence of circulator parameters of coherent wind lidar on distance measurement
-
摘要: 为了提高激光测风雷达性能,采用数学建模的方法,基于环行器工作原理,分析了环行器出射光束质量,讨论了光束发散角对目标距离处激光峰值光强的影响,提出了环行器光束接收效率定义,研究了发射和接收光轴偏轴度对探测距离的影响。并搭建实验平台,取得远场光斑参量,验证了仿真结果。结果表明,随着出射光束发散角增大,相同作用距离处的相对峰值光强减小;雷达探测距离主要受偏轴角度的影响,mrad量级的偏角会使探测距离减小89.7%。因此,应合理增大光学天线准直倍率,并且设计的角度调节结构精度应优于0.1mrad量级。Abstract: In order to improve the capability of wind lidar, based on mathematics modeling method and circulator principle, the transmitted beam quality of circulator was analyzed. The influence of divergence angle on the peak intensity at target distance was discussed. The definition of coupling efficiency of circulator was proposed. And the influence of misalignment between transmitting and receiving axis on detection range was researched. Experimental platform was built to obtain spot parameters in the far field. The simulation results were verified. The results show that, the relative peak intensity at the same distance decreases with the increasing of divergence angle of transmitted beam. The detection range of lidar is mainly affected by misalignment, and misalignment of mrad would make detection range decrease by 89.7%. Therefore, the collimation ratio of optical antenna should be increased reasonably and the structure precision for adjusting misalignment should be better than 0.1mrad level.
-
Keywords:
- laser technique /
- wind lidar /
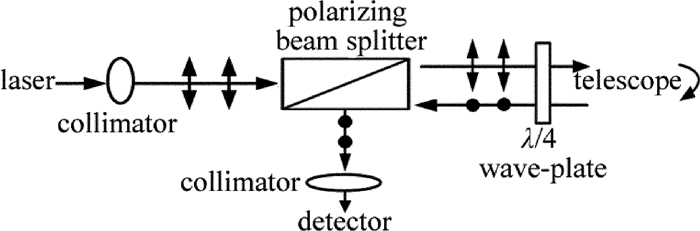
- circulator /
- beam quality /
- misalignment
-
-
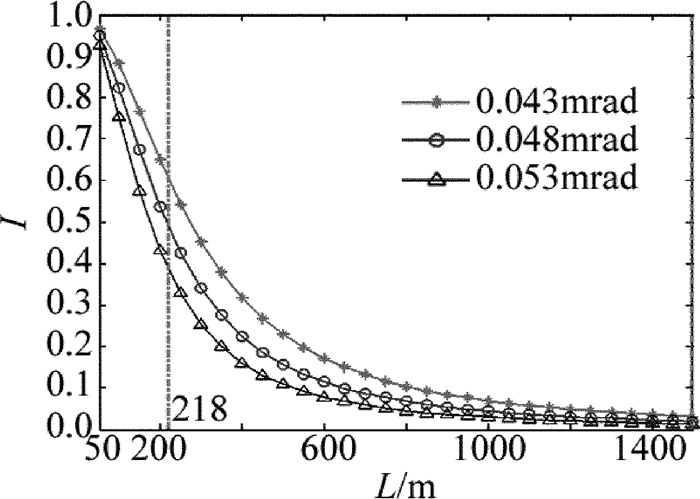
![]()
Figure 2. Relationship between distance and relative peak intensity with different divergence half-angles
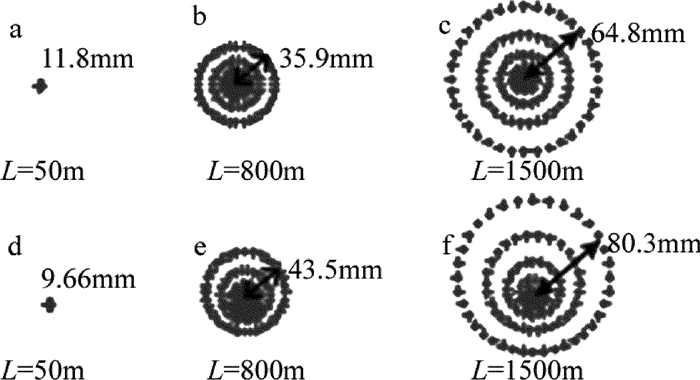
![]()
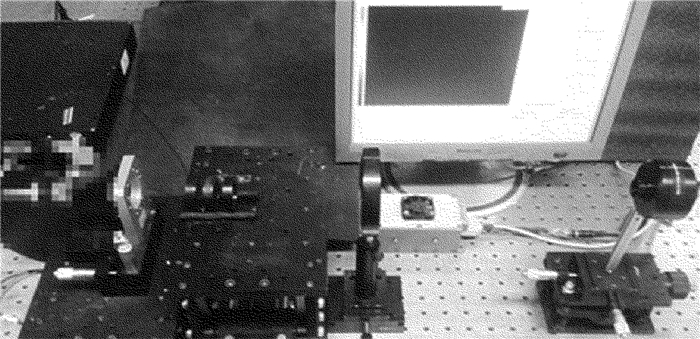
Figure 3. Transmitting spots with different distances
a~c—θ=0.043mrad, w0=11.6mm d~f—θ=0.053mrad, w0=9.28mm
Table 1 Spot diameter with different divergence half-angles and with the fixed far position
D/μm w0, x/mm w0, y/mm wx/mm wy/mm 9 0.0775 0.0760 0.0866 0.0838 15 0.0870 0.0867 0.0993 0.0965  下载: 导出CSV
下载: 导出CSV
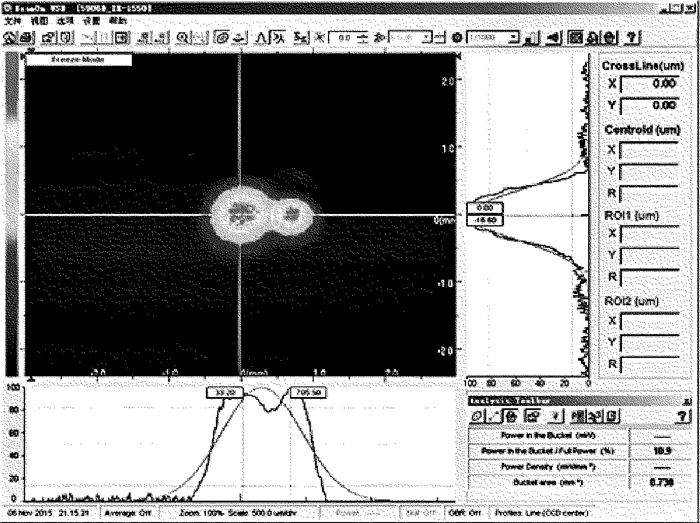
Table 2 Coupling efficiency with different misalignments and with fixed far position
h/mm Ot/μm Or/μm Sr, t/mm2 η 0.01 (705.5, 0) (33.2, -16.6) 0.738 0.109 0.02 (1011.7, 14.4) (47.1, 18.3) 0.196 0.023
下载: 导出CSV
-
[1] KAMEYAMA S, ANDO T, ASAKA K, et al. Compact all-fiber pulse coherent Doppler lidar system for wind sensing[J]. Applied Optics, 2007, 46(11):1953-1962. DOI: 10.1364/AO.46.001953
[2] MICHAEL J K, ROD G F. Parameter trade studies for coherent lidar measurements of wind from space[J]. Proceedings of the SPIE, 2007, 6681:668109. DOI: 10.1117/12.737429
[3] CHIRSTER J K, FREDRIK A A O, DIETMAR L, et al. All-fiber multifunction continuous-wave coherent laser radar at 1.55μm for range, speed, vibration, and wind measurements[J]. Applied Optics, 2000, 39(21):003716. DOI: 10.1364/AO.39.003716
[4] FENG L T, GUO H Q, CHEN Y, et al. Experiment of all fiber Doppler lidar at 1.55μm[J]. Infrared and Laser Engineering, 2011, 40(5):844-847(in Chinese). http://cn.bing.com/academic/profile?id=27abaee78d4cb4fae6b5ba9d13ec276e&encoded=0&v=paper_preview&mkt=zh-cn
[5] KOTANI T, ENYA K, NAKAGAWA T, et al. Development of a wave front correction system for the SPICA coronagraph instrument, space telescopes and instrumentation[J]. Optical, Infrared, and Millimeter Wave, 2010, 31(3):7731-7737. http://proceedings.spiedigitallibrary.org/proceeding.aspx?articleid=1346281
[6] WANG G Ch, DOU X K, XIA H Y, et al. Performance of a Raleigh Doppler lidar for middle atmosphere wind measurement[J]. Infrared and Laser Engineering, 2012, 41(9):2351-2357. http://en.cnki.com.cn/Article_en/CJFDTOTAL-HWYJ201209018.htm
[7] TANG L, SHU Zh F, DONG J H, et al. Mobile Rayleigh Doppler wind lidar based on double-edge technique[J]. Chinese Optics Letters, 2010, 8(1):8-15. http://www.cnki.com.cn/Article/CJFDTotal-GXKB201008003.htm
[8] REDDING B, CHOMA M A, CAO H. Speckle-free laser imaging using random laser illumination[J]. Nat Photonics, 2012, 6(6):355-359. DOI: 10.1038/nphoton.2012.90
[9] JENNESS J R, LYSAK D B, PHILBRICK R, et al. Design of a lidar receiver with fiber optic output[J]. Applied Optics, 1997, 36(18):4278-4284. DOI: 10.1364/AO.36.004278
[10] RAMOS I L, SCOTT V S, SCHMIDT S, et al. Optical system design and integration of the mercury laser altimeter[J]. Applied Optics, 2005, 44(9):1748-1760. DOI: 10.1364/AO.44.001748
[11] ZHAO E G, CHEN G H. Development of 1053nm fiber optic circulator[J]. Optical Fiber & Electric Cable, 2008, 4(1):26-28(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gxydljqyyjs200804009
[12] ZHANG Y, ZHAO Y, TANG M, et al. Analysis of the alignment errors on performance measurement of optical scanner of laser radar[J]. Infrared and Laser Engineering, 2006, 35(2):139-142(in Chinese). http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=1593031
[13] ZENG X, WU B, SHI X D, et al. Study on airborne laser cloud particle imaging probe and its calibration[J]. Laser Technology, 2015, 39(6):798-801(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jgjs201506014
[14] BU L B, SHAN K L, HUANG X Y. Studies on probe of cloud droplet[J]. Chinese Journal of Lasers, 2009, 36(1):216-218(in Chinese). DOI: 10.3788/JCL
计量
- 文章访问数: 7
- HTML全文浏览量: 1
- PDF下载量: 4