
FPGA-based adaptive fuzzy incremental PID control for fast steering mirror
-
摘要:
为了解决快速反射镜在传统比例-积分-微分(PID)控制下超调量大及稳定所需时间长的问题,引入自适应模糊算法优化控制器参数,提高控制性能。根据音圈电机快速反射镜的构成与工作原理,构建音圈电机快速反射镜的闭环控制模型,并针对模糊控制器中的隶属度函数及论域进行优化;通过现场可编程门阵列实现自适应模糊增量PID控制器,并进行了仿真及实物测试。结果表明,自适应模糊增量式PID控制器能使整体闭环过程“零超调”、“零振荡”,同时相比于传统PID控制器,系统稳定所需的时间缩短了17.5%,系统带宽提高了16.7%。该方法可有效提高快反镜的控制效果,可应用于其它需要高精度控制的系统当中。
-
关键词:
- 光学器件 /
- 快速反射镜 /
- 模糊比例-积分-微分控制 /
- 现场可编程门阵列 /
- 音圈电机
Abstract:To solve the problem of large overshooting and long time needed for stabilization of fast steering mirror (FSM) under traditional proportion-integration-differentiation (PID) control, adaptive fuzzy algorithm was introduced to optimize the control and improve the control performance. Based on the structure and working principle of the voice coil actuator (VCA) fast steering mirror, a closed-loop control model was constructed. The membership function and domain in the controller were optimized, and the adaptive fuzzy incremental PID controller was implemented through field-programmable gate array (FPGA). Simulations and physical tests were conducted. The results show that the adaptive fuzzy incremental PID controller can achieve "zero overshoot" and "zero oscillation" in the overall closed-loop process. At the same time compared with the traditional PID controller, the time required for system stabilization has been shortened by 17.5%, and the system bandwidth has been increased by 16.7%. This method can effectively improve the control effect of the fast steering mirror and can be applied to other systems requiring high-precision control.
-
0. 引言
快速反射镜简称快反镜,其具有响应速度快、控制带宽高、抗干扰能力强等优良特性,在激光精密定位、光束稳定、空间激光通信等高精尖领域起到了核心的作用[1-5]。设计出可靠且易于工程实现的控制器提升快反镜的性能具有迫切的现实意义。
在目前的快反镜系统中,通常采用传统比例-积分-微分(proportion-integration-differentiation,PID)控制,其可靠性高,发展相对成熟,但实际应用场景中,被控系统的机理复杂,导致系统会出现“超调”、“振荡”等问题。国内外专家学者对传统PID控制做了一些改进。IBRAHEEM等人[6]通过采用跟踪微分器改进PID控制器应对外界带来的非线性扰动,提高了系统的稳定性。AI等人[7]通过采用改进根轨迹的方式对PID参数进行调整,保证了系统动态性能,同时快反镜的机械谐振问题也得到了一定的改善,由于需要知道精确的系统数学模型,难度较高,过程较繁琐,并未得到广泛应用。KUMAR等人[8]采用布谷鸟搜索算法(cuckoo search algorithm,CSA)来确定控制器的最优系数,提高了系统的精度和响应速度。CAO等人[9]通过采用自适应算法的方式,对PID参数进行实时调整,提高了系统的跟踪精度与稳定性,但计算复杂,难度较大。LIU等人[10]采用离散不完全微分的PID控制抑制快反镜工作方向谐振, 提高控制带宽,但性能提升不明显。WANG等人[11-12]采用模型参考算法来优化PID参数,针对不同的场景进行特定的模型推算,算法的实现较为困难。
鉴上,本文作者设计了一种基于现场可编程门阵列(field-programmable gate array,FPGA)的自适应模糊增量式PID控制器来改善快反镜的控制效果。通过模糊控制理论进行PID参数的自整定来满足各种实际工作环境的变化,既具有传统PID控制的稳定性及易开发性,又有模糊控制的灵活性高、适应性好的特点,可以使快反镜抵抗外界扰动,提高系统的控制精度和带宽。
1. 音圈电机快速反射镜系统
音圈电机快速反射镜系统主要是通过改变快速反射镜镜面的偏转角度来实现光束偏折的目的。其主体为快反镜,其中包括: 柔性支撑结构,主要起到快速反射镜在自由状态时的保护作用;快反镜支架及底部基座;电涡流传感器,通过读取电涡流传感器的反馈值可推算出当前快速反射镜的摆动角度;控制器模块,主要进行快速反射镜的控制工作;音圈电机,主要作为执行元件驱动快反镜运动, 通过电磁力进行输出,为非接触式推拉的方式输出力矩,使快速反射镜发生角度偏转。通过音圈电机线圈的电感、电阻、电机的转动惯量及一些参量常数可得出音圈电机快速反射镜系统的传递函数[13]。
2. 自适应模糊增量式PID控制器设计
2.1 增量式PID控制器算法
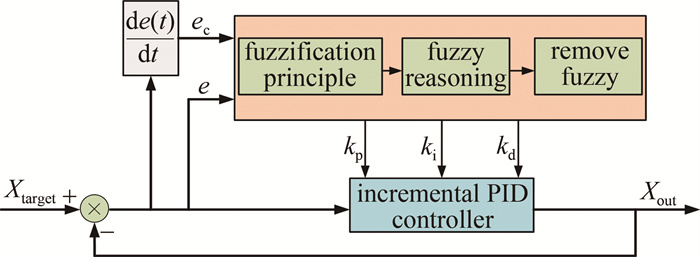
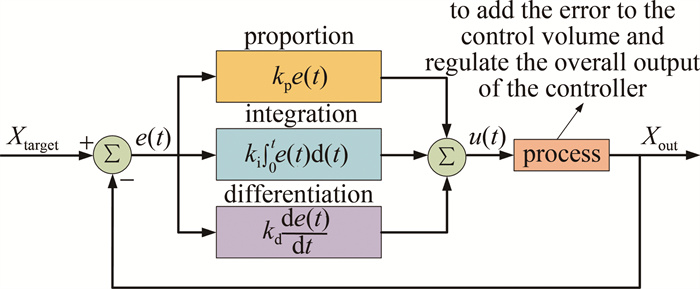
PID控制器的控制系统框图如图 1所示。
图 1中Xtarget为目标值,e(t)为当前时刻的偏差值,kp为比例系数,ki为积分系数,kd为微分系数,u(t)为当前时刻的输出值,Xout为控制器最终的输出值。根据图 1可以得到:
u(t)=kpe(t)+ki∫t0e(t)dt+kd de(t)dt (1) 将式(1)进行离散化之后可得到:
u(k)=kpe(k)+kik∑i=1e(i)Δt+kde(k)−e(k−1)Δt (2) 式中: u(k)为第k次的输出值; e(k)为第k次的偏差值; Δt为两次运算的间隔时间。
Δu(k)=u(k)−u(k−1) (3) 将式(2)代入到式(3)中进一步简化,可得到增量式PID控制器的公式为:
Δu(k)=kp[e(k)−e(k−1)]+kie(k)+kd[e(k)−2e(k−1)+e(k−2)] (4) 式中:Δu(k)为第k次运算时输出的增量。整理式(4)可得:
Δu(k)=e(k)(kp+ki+kd)−e(k−1)(kp+2kd)+e(k−2)kd (5) 式(5)是本文中所用的表达形式,可以看出, 当计算第k次输出的增量时,仅需知道e(k)、e(k-1)、e(k-2)以及kp、ki、kd即可,计算和存储量相比于原先的PID控制器都大幅减少了。在音圈电机快反镜的控制中,需要输出u(k)驱动音圈电机,因此增加一个积分电路即可。
2.2 自适应模糊增量式PID控制器原理
自适应模糊增量式PID控制器是通过模糊化、模糊推理、去模糊3个步骤对kp、ki、kd进行实时调整,使系统在复杂多变的环境中达到自适应的效果,其系统框图如图 2所示。图中,ec(即de(t)/dt)和e为输入变量。
![图 2 自适应模糊增量式PID控制器的系统框图]() 图 2 自适应模糊增量式PID控制器的系统框图Figure 2. System block diagram of adaptive fuzzy incremental PID controller
图 2 自适应模糊增量式PID控制器的系统框图Figure 2. System block diagram of adaptive fuzzy incremental PID controller2.2.1 模糊化
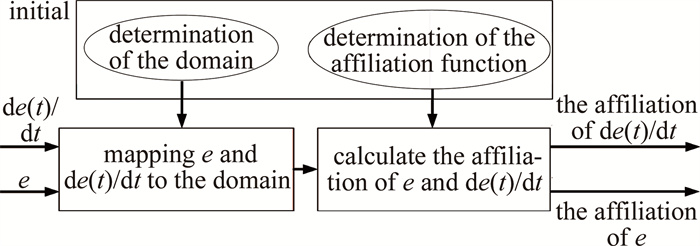
模糊化过程如图 3所示,主要包括区间映射和根据隶属度函数计算隶属度。
将输入变量e和de(t)/dt(即ec)两个论域定为[-3, 3],并进行7级分隔,平均分为6等份,即[-3, -2]、[-2, -1]、[-1, 0]、[0, 1]、[1, 2]、[2, 3]。把每个端点进行等级划分,依次为:-3代表较大负数边界,-2代表中等负数边界,-1代表较小负数边界,0代表零位,1代表较小正数边界,2代表中等正数边界,3代表较大正数边界。
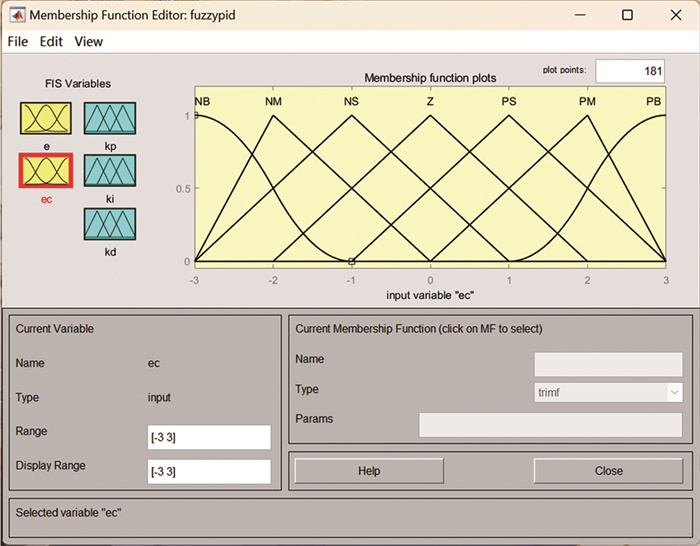
输入变量ec、e的隶属度设置如图 4所示。隶属度函数主体采用三角形隶属度函数,小端采用Z形隶属度函数,大端采用S状隶属度函数。
2.2.2 模糊推理
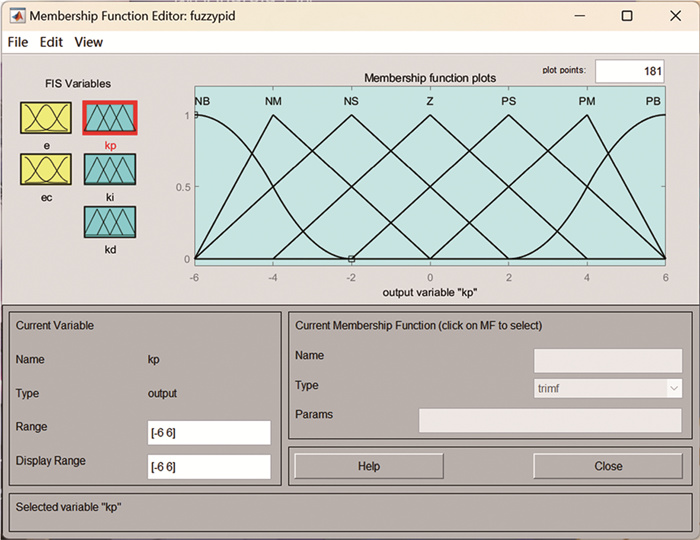
模糊推理即根据e与de(t)/dt的隶属度进行查表得到输出的大小程度。输出变量kp、ki、kd的变化区间分别为[-6, 6]、[-6, 6]、[-1, 5]。同样进行7级分隔,平均分为6等份,通过改变隶属度函数,隶属度函数宽度定为4,同时缩小参数的论域范围,减小占比,可保证整体闭环过程更平稳,抑制“超调”、“振荡”等问题。
输出变量kp、ki、kd的隶属度设置如图 5所示。
在PID参数调节的过程中,根据专家的工程调试经验研究表明[14]:(a)当实际值与目标值偏差较大时,为使系统具有良好的带宽, 应当将kp相应地增大同时将kd相应地减小,同时为防止系统超调量过大, 应对积分项加以限制;(b)当实际值与目标值偏差处于中等大小时,为使系统具有较小的超调量, kp应取小些,此时,系统动态响应性能主要由kd影响,同时要适当选取ki的数值;(c)当实际值与目标值偏差较小时,为使系统具有较好的稳态性能,应将ki相应地增大些,同时为了避免系统出现振荡的问题,kd的选择是非常重要的。
参考上述经验,针对3个输出变量kp、ki、kd,本文中采取Madamni直接推理法[15], 即当e与de(t)/dt的隶属度均较小时,kp的隶属度较大,ki的隶属度较小;当e与de(t)/dt的隶属度一者大一者小时,kp的隶属度与ki的隶属度保持中等大小;当e与de(t)/dt的隶属度均较大时,kp的隶属度较小,ki的隶属度较大。
2.2.3 去模糊
通过模糊推理中得到kp、ki、kd的隶属度,去模糊处理根据隶属度及区间映射关系,得到3个参数的输出值。本文中将采用重心法[16]进行去模糊处理。
2.3 自适应模糊增量式PID控制器性能分析
利用频谱分析和伪随机噪声的方法辨识精跟踪快反镜参数,可得到快反镜的传递函数G(s),如下式所示:
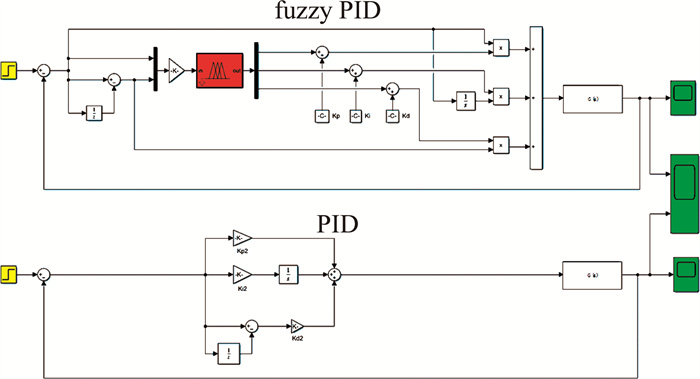
G(s)=−2.84×104s2+1272s+2.546×104 (6) 为验证自适应模糊增量式PID控制器的效果,基于仿真软件,分别建立传统PID控制器和自适应模糊增量式PID控制器[17-21]如图 6所示。
![图 6 自适应模糊增量式PID控制器及传统PID控制器框图]() 图 6 自适应模糊增量式PID控制器及传统PID控制器框图Figure 6. Block diagram of adaptive fuzzy incremental PID controller and conventional PID controller
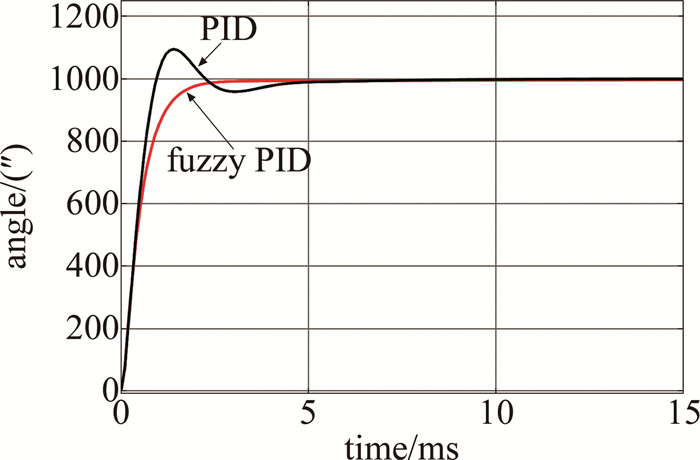
图 6 自适应模糊增量式PID控制器及传统PID控制器框图Figure 6. Block diagram of adaptive fuzzy incremental PID controller and conventional PID controller自适应模糊增量式PID控制器与传统PID控制器的仿真结果如图 7所示。
![图 7 自适应模糊增量式PID控制器和传统PID控制器的控制效果仿真图]() 图 7 自适应模糊增量式PID控制器和传统PID控制器的控制效果仿真图Figure 7. Simulation of control effect of adaptive fuzzy incremental PID controller and conventional PID controller
图 7 自适应模糊增量式PID控制器和传统PID控制器的控制效果仿真图Figure 7. Simulation of control effect of adaptive fuzzy incremental PID controller and conventional PID controller从仿真结果可以看出,自适应模糊增量式PID控制器相比于传统PID控制器能在保证闭环速度的同时有效地抑制超调量过大的问题,可更快地到达稳定。综上所述,自适应模糊增量式PID控制器更适合应用于快反镜的控制中。
3. 实验验证
3.1 自适应模糊增量式PID控制器的FPGA实现
在FPGA中的实现可分为状态机和流水线两种方式。本文中采用的是状态机方式,虽时间上不及流水线方式,但逻辑方式简洁,方便后续的修改和维护,同时所使用的资源也更少。
为使双向闭环的效果统一,便于监控,在进行目标值与实际值作差时,采用取绝对值的方式来保证结果均为正数。同时为避免FPGA不能进行浮点数运算的缺点,本文作者将整体过程中的参数均进行了放大512倍的处理,在保证不会由于放大倍数过大导致运算速度变慢的同时也确保了闭环的精度。
设计中将常量参数、区间映射域和PID参数规则表定义在Verilog head文件中,方便后续模块对其进行调用。主体程序采用分模块的方式进行编写,主要包括减法模块、离散化模块、查表模块、加法模块等,通过在顶层文件中进行各模块的例化与连线进行数据传输和运算,最终完成控制器的输出。
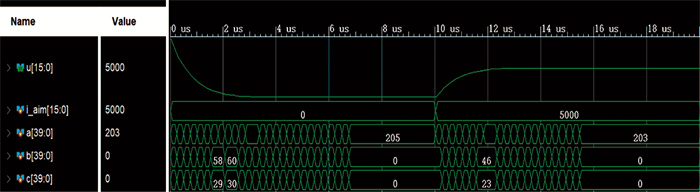
通过相关软件进行前仿真测试,其结果如图 8所示。
![图 8 自适应模糊增量式PID控制器代码运行结果]() 图 8 自适应模糊增量式PID控制器代码运行结果Figure 8. Code run results of adaptive fuzzy incremental PID controller
图 8 自适应模糊增量式PID控制器代码运行结果Figure 8. Code run results of adaptive fuzzy incremental PID controller图 8中变量a为e(k)的系数,即kp+ki+kd, 变量b为e(k-1)的系数,即kp+2kd,变量c为e(k-2)的系数,即kd。将第1次目标值设定为0,起始值为10000,第2次目标值为5000,起始值为0,从仿真结果图中可以看到两次闭环均可实现,且无明显超调量,可快速到达目标值,同时PID相关参数在闭环过程中也在随时调整,保证整体闭环过程的平稳。
3.2 自适应模糊增量式PID控制器性能测试
为验证上述理论,搭建相关测试设备。该设备以复旦微KINTEX-7FPGA为核心,模数转换芯片采用AD7961芯片,数模转换芯片采用AD9764芯片。
FPGA采用模数转换芯片采集电涡流传感器的值,推算快反镜的位置信息,通过自适应模糊增量式PID控制器进行闭环控制,并通过数模转换芯片控制音圈电机工作,使快反镜运动到设定位置,令电涡流传感器的值达到设定值。
下面通过阶跃测试和带宽测试来进行自适应模糊增量式PID控制器的性能测试实验。
3.2.1 阶跃测试
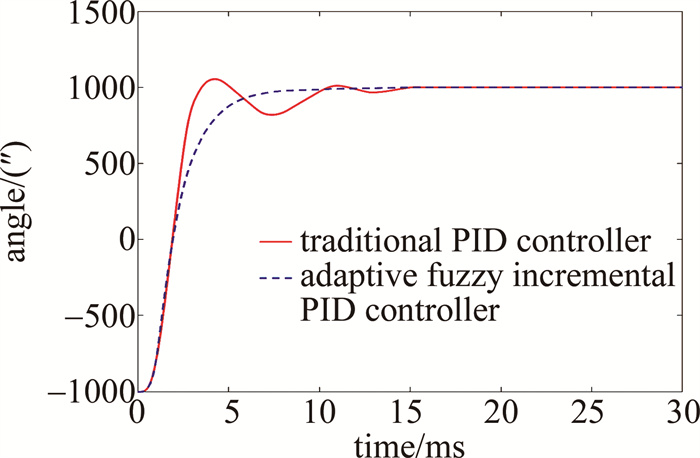
通过FPGA读取电涡流传感器的值,并通过上位机下发指令,引导快反镜运动,使其电涡流传感器的值从-1000~1000,分别对传统PID控制器与自适应模糊增量式PID控制器进行测试,以频率100 Hz记录数值的变化趋势, 测试效果如图 9所示,相关数据如表 1所示。
![图 9 自适应模糊增量式PID控制器和传统PID控制器的阶跃测试结果]() 图 9 自适应模糊增量式PID控制器和传统PID控制器的阶跃测试结果Figure 9. Step test results of adaptive fuzzy incremental PID controller and conventional PID controller表 1 自适应模糊增量式PID控制器和传统PID控制器的阶跃测试数据Table 1. Step test data of adaptive fuzzy incremental PID controller and conventional PID controller
图 9 自适应模糊增量式PID控制器和传统PID控制器的阶跃测试结果Figure 9. Step test results of adaptive fuzzy incremental PID controller and conventional PID controller表 1 自适应模糊增量式PID控制器和传统PID控制器的阶跃测试数据Table 1. Step test data of adaptive fuzzy incremental PID controller and conventional PID controllercontroller overshooting/ % time required for stabilization/ms number of oscillations traditional PID controller 5 10.3 2 adaptive fuzzy incremental PID controller 0 8.5 0 测试结果表明,相比于传统PID控制器,自适应模糊增量式PID控制器能够有效地解决控制过程中“超调”和“振荡”的问题,可实现“零超调”、“零振荡”, 同时闭环稳定时间由10.3 ms缩短为8.5 ms, 所需的时间更短,缩短了1.8ms,缩短了17.5%。整体过程平稳更适用于快反镜的控制。
3.2.2 带宽测试
通过上位机下发指令,引导系统做出振幅为310″(即峰峰值为620″、周期为1 Hz)的正弦波运动。通过改变指令和引导数据,将系统的运动频率逐步提高,检测快反镜摆动幅值随频率的变化,进而得出系统闭环控制的带宽。分别对传统PID控制器和自适应模糊增量式PID控制器进行测试, 测试结果如图 10所示。
![图 10 带宽测试结果]() 图 10 带宽测试结果a—传统PID控制器b—自适应模糊增量式PID控制器Figure 10. Results of bandwidth testa—conventional PID controller b—adaptive fuzzy incremental PID controller
图 10 带宽测试结果a—传统PID控制器b—自适应模糊增量式PID控制器Figure 10. Results of bandwidth testa—conventional PID controller b—adaptive fuzzy incremental PID controller测试结果表明,对于传统PID控制器,当运动频率f=180 Hz时,运动幅值下降到设定值的0.707倍(-3 dB),如图 10a所示;对于自适应模糊增量式PID控制器,当运动频率f=210 Hz时,运动幅值依旧满足设定值-3 dB,如图 10b所示,即系统带宽从180 Hz提升至210 Hz,提高了16.7%。
4. 结论
采用自适应模糊增量式PID控制器对快反镜进行控制,使快速反射镜应对复杂的使用环境,以达到自适应的效果。同时根据设计结果进行相关性能的仿真,并搭建相关实验环境进行测试。结果表明,自适应模糊增量式PID控制器能够有效地抑制“超调”、“振荡”的问题,可实现“零起调”、“零振荡”, 稳定所需时间由10.3 ms减小到8.5 ms, 缩短了17.5%,系统带宽由180 Hz提高到了210 Hz,提升了16.7%,表明该方法可以大幅压缩快速反射镜系统的时间延迟,提高系统带宽。
-
![]()
图 2 自适应模糊增量式PID控制器的系统框图
Figure 2. System block diagram of adaptive fuzzy incremental PID controller
![]()
图 6 自适应模糊增量式PID控制器及传统PID控制器框图
Figure 6. Block diagram of adaptive fuzzy incremental PID controller and conventional PID controller
![]()
图 7 自适应模糊增量式PID控制器和传统PID控制器的控制效果仿真图
Figure 7. Simulation of control effect of adaptive fuzzy incremental PID controller and conventional PID controller
![]()
图 8 自适应模糊增量式PID控制器代码运行结果
Figure 8. Code run results of adaptive fuzzy incremental PID controller
![]()
图 9 自适应模糊增量式PID控制器和传统PID控制器的阶跃测试结果
Figure 9. Step test results of adaptive fuzzy incremental PID controller and conventional PID controller
![]()
图 10 带宽测试结果
a—传统PID控制器b—自适应模糊增量式PID控制器
Figure 10. Results of bandwidth test
a—conventional PID controller b—adaptive fuzzy incremental PID controller
表 1 自适应模糊增量式PID控制器和传统PID控制器的阶跃测试数据
Table 1 Step test data of adaptive fuzzy incremental PID controller and conventional PID controller
controller overshooting/ % time required for stabilization/ms number of oscillations traditional PID controller 5 10.3 2 adaptive fuzzy incremental PID controller 0 8.5 0  下载: 导出CSV
下载: 导出CSV
-
[1] KLUK D J, BOULET M T. TRUMPERD L. A high-bandwidth, high-precision, two-axis steering mirror with moving iron actuator[J]. Mechatronics, 2012, 22(3): 257-270. DOI: 10.1016/j.mechatronics.2012.01.008
[2] 王震, 程雪岷. 快速反射镜研究现状及未来发展[J]. 应用光学, 2019, 40(3): 373-379. WANG Zh, CHENG X M. Research progress and development trend of fast steering mirror[J]. Journal of Applied Optics, 2019, 40 (3): 373-379(in Chinese).
[3] 周倩, 张兵, 李志俊, 等. 光电跟踪系统的区间2型模糊滑模控制方法[J]. 激光技术, 2023, 47(3): 293-300. ZHOU Q, ZHANG B, LI Zh J, et al. Interval type-2 fuzzy sliding mode control method of electro optical tracking system[J]. Laser Technology, 2023, 47(3): 293-300(in Chinese).
[4] WANG Y K, LI D Y, WANG R, et al. High-bandwidth fine tracking system for optical communication with double closed-loop control method[J]. Optical Engineering, 2019, 58(2): 026102.
[5] 王毅刚, 刘力双, 康登魁, 等. 用于深空探测快速反射镜的电磁驱动[J]. 激光技术, 2023, 47(2): 214-219. DOI: 10.7510/jgjs.issn.1001-3806.2023.02.009 WANG Y G, LIU L Sh, KANG D K, et al. Research on electromagnetic drive of fast steering mirror for deep space detection[J]. Laser Technology, 2023, 47(2): 214-219(in Chinese). DOI: 10.7510/jgjs.issn.1001-3806.2023.02.009
[6] IBRAHEEM K I, WAMEEDH R A. On the improved nonlinear tracking differentiator based nonlinear PID controller design[J]. International Journal of Advanced Computer Science and Applications, 2016, 7(10): 234-241.
[7] 艾志伟, 谭毅, 吴琼雁, 等. 改进根轨迹的快速反射镜控制参量设计[J]. 激光技术, 2017, 41(4): 558-561. AI Zh W, TAN Y, WU Q Y, et al. Design of control parameters for fast steering mirrors by improving root locus[J]. Laser Technology, 2017, 41(4): 558-561(in Chinese).
[8] KUMAR M, RAWAT T K. Optimal design of FIR fractional order di-fferentiator using cuckoo search algorithm[J]. Expert Systems with Applications, 2015, 42(7): 3433-3449. DOI: 10.1016/j.eswa.2014.12.020
[9] 曹洪瑞, 刘永凯, 张淑梅. 基于快速反射镜的自适应控制算法研究[J]. 传感器与微系统, 2017, 36(1): 16-19. CAO H R, LIU Y K, ZHANG Sh M. Adaptive control algorithm research based on fast steering mirror[J]. Transducer and Microsystem Technologies, 2017, 36(1): 16-19(in Chinese).
[10] 刘献之, 贾建军, 黄迪山, 等. 光自闭环快反镜的控制器设计[J]. 仪表技术与传感器, 2017(3): 37-41. LIU X Zh, JIA J J, HUANG D Sh, et al. Design of optical self closed loop fast steering mirror controller[J]. Instrument Technique and Sensor, 2017(3): 37-41(in Chinese).
[11] WANG R, WANG Y K, JIN Ch B, et al. Demonstration of horizontal free-space laser communication with the effect of the bandwidth of adaptive optics system[J]. Optics Communications, 2019, 431: 167-173. DOI: 10.1016/j.optcom.2018.09.038
[12] WANG Zh X, ZHANG B, LI X T, et al. Study on application of model reference adaptive control in fast steering mirror system[J]. Optik, 2018, 172: 995-1002. DOI: 10.1016/j.ijleo.2018.07.095
[13] 舒郁, 陈青山, 夏润秋, 等. 光电精跟踪系统音圈电机快反镜的预先修正控制[J]. 激光技术, 2023, 47(6): 811-815. SHU Y, CHEN Q Sh, XIA R Q, et al. Pre-amending and controllment of voice coil actuator fast steering mirror of opto-electronic fine tracking system[J]. Laser Technology, 2023, 47(6): 811-815(in Chinese).
[14] GAO Q, FENG G, WANG Y, et al. Universal fuzzy models and universal fuzzy controllers for stochastic non-affine nonlinear systems[J]. IEEE Transactions on Fuzzy Systems, 2013, 21(2): 328-341. DOI: 10.1109/TFUZZ.2012.2213823
[15] ZHOU Y, WU Y M, YANG T H. Study on electric actuator control system[C]//2019 Chinese Control and Decision Conference (CCDC). New York, USA: IEEE Press, 2019: 865-870.
[16] 王晓侃, 王亮. 基于MATLAB的模糊PID参数自整定控制器设计与研究[J]. 新技术新工艺, 2016(11): 26-28. WANG X K, WANG L. Design and research based on fuzzy PID-parameters self-tuning controller with MATLAB[J]. New Technology & New Process, 2016(11): 26-28(in Chinese).
[17] 石坤. 基于Matlab/Simulink的模糊主动控制仿真[J]. 电子测试, 2018(23): 5-7. SHI K. Simulation experiment on fuzzy controller based on Matlab/Simulink[J]. Electronic Test, 2018(23): 5-7(in Chinese).
[18] WANG H Q, CHEN B, LIU X P, et al. Robust adaptive fuzzy tracking control for pure-feedback stochastic nonlinear systems with input constraints[J]. IEEE Transactions on Cybernetics, 2013, 43(6): 2093-2104. DOI: 10.1109/TCYB.2013.2240296
[19] 宋超, 曹翱, 温家玺. 自适应模糊PID控制器的设计及MATLAB仿真[J]. 现代制造技术与装备, 2018, 260(7): 203-205. SONG Ch, CAO A, WEN J X. Design of adaptive fuzzy PID controller and MATLAB simulation[J]. Modern Manufacturing Techno-logy and Equipment, 2018, 260(7): 203-205(in Chinese).
[20] 李强. 基于模糊控制理论的PID闭环控制系统的研究与设计[J]. 现代电子技术, 2015, 38(22): 131-134. LI Q. Research and design of PID closed-loop control system based on fuzzy control theory[J]. Modern Electronics Technique, 2015, 38(22): 131-134(in Chinese).
[21] ZHAO Ch, LIU J G, TANG Y. Design and simulation of fuzzy self-adaption PID three closed loop control based on Simulink[J]. Digi-tal Technology & Application, 2019, 37(10): 1-4(in Chinese).

计量
- 文章访问数: 3
- HTML全文浏览量: 0
- PDF下载量: 3