
Registering forest laser scanning point cloud with smartphone
-
摘要:
地面激光扫描获取的精确林下3维信息通常需要将多站扫描点云数据进行配准。为了减少森林激光扫描数据采集时对额外设备或功能的需求,提出了一种使用智能手机定位定向数据的森林激光扫描数据配准方法。首先使用智能手机获取设站点定位信息和起始扫描方向,计算测站间的初始坐标转换参数,然后在初始转换参数基础上构建搜索空间,分别使用树干位置点的水平均方根误差和对应点数目构建两级目标函数,进行转换参数的搜索和筛选,并使用测站间距对树干位置点进行筛选,得到最终配准结果。结果表明,在6对测站上进行的配准实验中,得到平均旋转角误差为4.3′、水平和竖直平移误差分别为8.3 mm和35 mm。本文中的方法可提高配准效率和精度,且具有较高的稳定性,在冠层厚度不超过11.5 m下,智能手机可为森林点云配准提供有效的辅助信息。
Abstract:Accurate 3-D understory information obtained by terrestrial laser scanning usually requires the registration of multi-station scanning point cloud data. In order to reduce the need for additional equipment or functions when collecting forest laser scanning data, a forest laser scanning data registration method using smartphone positioning and orientation data was proposed. Firstly, initial transformation parameters were calculated based on the positioning and orientation from the smartphone. Then search space was generated from the initial transformation parameters, and different parameters were further evaluated by the proposed two-level objective functions using stem positions to obtain final registration result. During the evaluation process, stem positions were filtered by the distance between two scanner positions. The results of the registration test conducted on six pairs of measuring stations showe that the average rotation angle error 4.3′, horizontal and vertical translation errors obtained are 8.3 mm and 35 mm, respectively. The proposed method can improve the registration accuracy and efficiency and has high stability, and smartphone can provide effective auxiliary information for registration with canopy height (less than 11.5 m).
-
0. 引言
地面激光扫描是一种有效的林业调查工具,可以用于植被点云提取[1]单木位置[2]、胸径[3]、叶面积指数[4]、树种[5]等森林参数的提取和估算。由于前视遮挡、扫描范围有限等原因,单测站激光扫描往往难以覆盖整个场景,因而需要架设多个测站并将不同测站扫描数据的坐标转换至同一坐标系下,该过程为点云配准。森林激光点云配准可以为林业调查提供完整的基础数据,是森林激光扫描数据处理的重要环节。
传统森林激光点云配准方法有人工配准[6]、布设标靶[7]等,但森林场景中树干、树冠等主要地物相似性较高,且前视遮挡较为严重,人工配准和布设标靶方法在大范围森林场景下效率低。因此,无标靶的森林点云配准方法对提高森林环境下的激光扫描数据采集和使用效率有重要的意义。
森林环境下的无标靶激光点云配准通常使用树干或树冠提取得到的配准基元。LIANG等人使用单木位置点构建水平向量作为配准基元,通过长度、旋转角等特征进行筛选并计算水平转换参数,但由于复杂度较高,该方法仅计算了水平转换参数[8]。在此基础上上,LIU等人提取树干不同高度的中心坐标和半径,用以计算竖直方向的平移参数[9]。KELBE等人基于树干位置点集构建三元组,并使用坐标、胸径和协方差矩阵特征值作为特征描述,查找可能的同名树干位置点实现森林点云配准[10]。由于需要遍历所有三元组对,该方法复杂度较高。针对这个问题,TREMBLAY等人将多线程运算应用于三元组匹配过程,并使用三元组边长替代协方差矩阵特征值,通过调整存储方案使算法更适用于多线程策略,以提高配准的效率[11]。与TREMBLAY等人思路相近,JIN等人将三元组的边长作为特征值,通过K维(K-dimensional, KD)树索引提高三元组匹配的效率[12]。DAI等人通过均值漂移在树冠处提取特征点实现粗配准,然后筛选重叠区域的单木位置点进行精配准,与直接使用所有树干位置点的配准结果相比,该方法在保证配准精度的同时提高了配准效率[13]。在面向单木的配准基元检测思路之外,GUAN等人提出从树干阴影区域检测特征基元的方法[14]。直接从激光点云中提取配准基元往往复杂度较高,在复杂森林存在稳定性不足的缺点,部分研究人员通过使用额外仪器获取辅助信息来简化配准过程,例如,通过测斜器获取激光点云绕x轴和y轴的旋转参数[15],或者通过反射片后视定向获取测站间平移参数[16]以及通过实时动态(real-time kinematic,RTK)设备获取测站位置[17]。
已有的研究表明,激光扫描辅助信息可以提供部分转换参数初值[18],简化森林激光点云配准过程,但需携带额外设备或对扫描仪功能提出更多要求,会增加林下作业负担或限制方法的适用范围。此外,基于树干位置点的配准方法大多使用所有位置点进行配准。尽管有很多研究显示,由于地面点或树干点密度的下降甚至缺失,远距离树干位置点精度会随之降低,进而影响配准精度[11, 13],但对树干位置点进行筛选的研究仍然不足。针对上述问题,本文作者提出一种以智能手机辅助的森林激光点云配准方法,使用智能手机获取测站定位和定向数据等辅助信息实现粗配准,然后构建基于2级目标函数的精配准方法,同时在该过程中基于测站间距对单木位置点进行筛选以提高配准精度。
1. 方法
1.1 智能手机数据采集与点云预处理
本文中使用智能手机的内置传感器辅助激光扫描和粗配准过程,由于智能手机定位定向数据仅用于粗配准,因此在每站扫描前将手机置于扫描仪上,无需精确校准二者相对位置关系。通过手机陀螺仪实现扫描仪粗略置平,并测量每站起始扫描方向的方位角,即起始扫描方向与北向的顺时针夹角。由于地面激光扫描仪通常以起始扫描方向作为局部坐标系x轴,因此可得测站局部坐标系x轴的方位角,实现定向数据获取。通过手机定位设备获取设站点的大地坐标(即设站点的经纬度),可实现定位数据获取。智能手机的定位和定向功能可通过软件开发工具包(software development kit,SDK)调用或手机地图应用获取。
对每站激光点云数据,使用树干位置点集作为输入,即一系列用于描述每颗树木位置的3维坐标集合。本文作者使用参考文献[19]中的方法提取单木位置点,通过随机森林算法提取树干点,并分段拟合树干的圆柱模型,计算每棵树对应的最低圆柱轴线与地面模型的交点作为单木位置点。
1.2 使用定位定向数据的粗配准
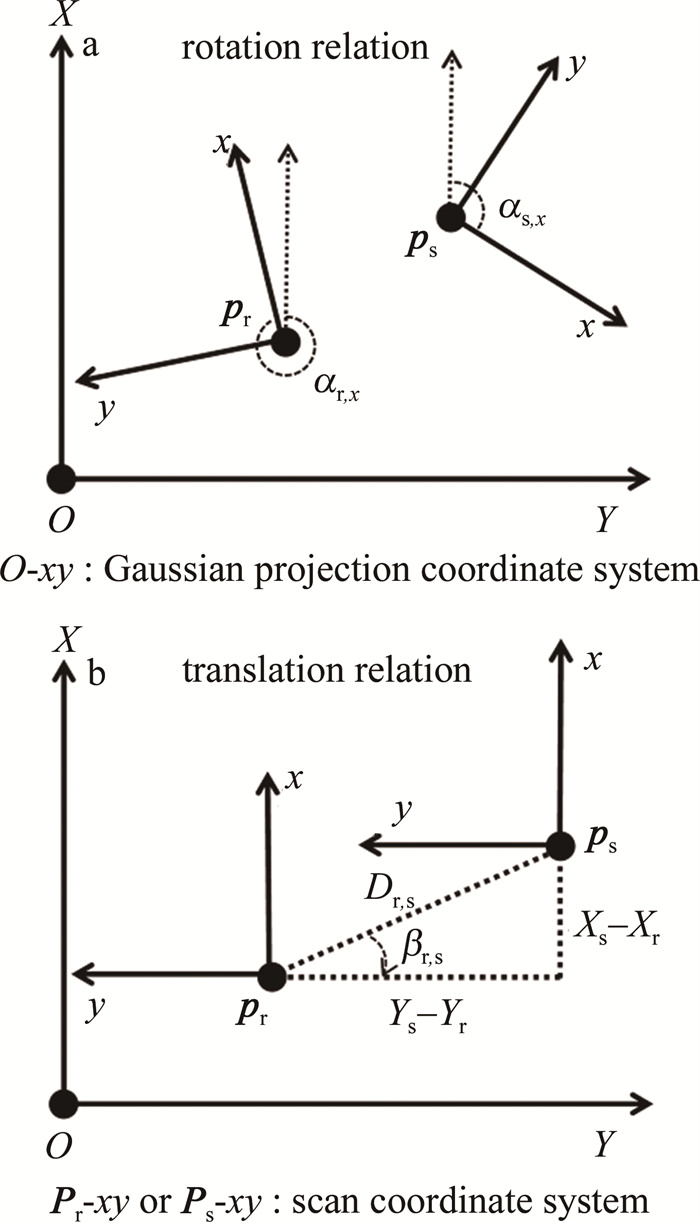
本文中采用多测站逐对配准的方式进行转换参数计算,基本思路是在全局投影坐标系下计算测站间的平面转换参数。首先基于智能手机定向信息将两站点云转换至x轴为北向时的扫描结果,如图 1a所示;然后基于参考站和待配准站定位数据计算测站间的平移参数,如图 1b所示。
![图 1 使用定位和定向数据表示测站间的转换关系]() 图 1 使用定位和定向数据表示测站间的转换关系Figure 1. Relation between two scans based on the positioning and orientation data
图 1 使用定位和定向数据表示测站间的转换关系Figure 1. Relation between two scans based on the positioning and orientation data转换参数计算如下:
\boldsymbol{R}\left(0, 0, -\alpha_{\mathrm{r}, x}\right) \boldsymbol{p}_{\mathrm{r}}=\boldsymbol{R}\left(0, 0, -\alpha_{\mathrm{s}, x}\right) \boldsymbol{p}_{\mathrm{s}}+\boldsymbol{M} (1) 式中:\boldsymbol{p}_{\mathrm{r}}=\left[x_{\mathrm{r}}, y_{\mathrm{r}}, z_{\mathrm{r}}\right]^{\mathrm{T}}和\boldsymbol{p}_{\mathrm{s}}=\left[x_{\mathrm{s}}, y_{\mathrm{s}}, z_{\mathrm{s}}\right]^{\mathrm{T}}分别表示两测站间的对应点; αr, x和αs, x分别为pr和ps对应的x轴方位角,地面激光扫描通常将起始扫描方向作为x轴,因此αr, x和αs, x可通过智能手机定向数据直接获取; R (0, 0, α)为旋转矩阵,表示绕z轴逆旋转α角度; M为平移矩阵,可通过智能手机定位数据得到:
\boldsymbol{M}=\left[\begin{array}{c} X_{\mathrm{s}}-X_{\mathrm{r}} \\ -\left(Y_{\mathrm{s}}-Y_{\mathrm{r}}\right) \\ 0 \end{array}\right]=\left[\begin{array}{c} D_{\mathrm{r}, \mathrm{~s}} \sin \beta_{\mathrm{r}, \mathrm{~s}} \\ -D_{\mathrm{r}, \mathrm{~s}} \cos \beta_{\mathrm{r}, \mathrm{~s}} \\ 0 \end{array}\right] (2) 式中:(Xr, Yr)和(Xs, Ys)分别为pr和ps的全局投影坐标,可由智能手机定位得到的大地坐标转换得到,由于投影坐标系和测站坐标系分别为左手系和右手系,二者对应的y轴的平移方向相反;Dr, s为设站位置pr和ps间的水平距离; βr, s为pr和ps连线与y轴正方向之间的顺时针夹角。
\beta_{\mathrm{r}, \mathrm{~s}}=\left\{\begin{array}{l} \arccos \left(\frac{Y_{\mathrm{s}}-Y_{\mathrm{r}}}{D_{\mathrm{r}, \mathrm{~s}}}\right), \left(X_{\mathrm{s}}-X_{\mathrm{r}} \geqslant 0\right) \\ 2 \pi-\arccos \left(\frac{Y_{\mathrm{s}}-Y_{\mathrm{r}}}{D_{\mathrm{r}, \mathrm{~s}}}\right), \left(X_{\mathrm{s}}-X_{\mathrm{r}} <0\right) \end{array}\right. (3) 在此基础上,通过变换式(1)可得粗配准转换参数,即旋转矩阵R和平移矩阵t。
\begin{gathered} \boldsymbol{p}_{\mathrm{r}}=\boldsymbol{R} \boldsymbol{p}_{\mathrm{s}}+\boldsymbol{t}=\boldsymbol{R}\left(0, 0, \alpha_{\mathrm{r}, x}-\alpha_{\mathrm{s}, x}\right) \boldsymbol{p}_{\mathrm{s}}+ \\ \boldsymbol{R}\left(0, 0, \alpha_{\mathrm{r}, x}\right) \boldsymbol{M} \end{gathered} (4) 1.3 使用两级目标函数的精配准
由于智能手机定位和定向数据可能存在较大误差,由式(4)得到的转换参数通常存在较大误差。在精配准中,本文作者提出基于树干位置点的两级评价函数,以参考站和待配准站的树干位置点集Mr和Ms作为输入,构建一系列转换参数并进行评估。
1.3.1 第1级目标函数
对式(4),若将βr, s作为常数,则转换参数由智能手机定位定向所得数据αr, x、αs, x和Dr, s计算得到。以αr, x、αs, x和Dr, s作为初始值,可构建相应搜索空间:
\left\{\begin{array}{l} \alpha_{\mathrm{r}} \in\left[\alpha_{\mathrm{r}, x}-\pi / 2, \alpha_{\mathrm{r}, x}+\pi / 2\right] \\ \alpha_{\mathrm{s}} \in\left[\alpha_{\mathrm{s}, x}-\pi / 2, \alpha_{\mathrm{s}, x}+\pi / 2\right] \\ D \in\left[\max \left(D_{\mathrm{r}, \mathrm{~s}}-10, 0\right), D_{\mathrm{r}, \mathrm{~s}}+10\right] \end{array}\right. (5) 式中: αr和αs分别为参考站和待配准站x轴方位角; D为测站位置间距; 设角度αr和αs的搜索间隔设为δα; D的搜索间隔为δD。在搜索区间内,共构建Nt组参数,对每组(αr, αs, D)使用式(4)构建转换参数,对树干位置点集Ms进行坐标转换,并使用互为最邻近点的方式搜索其在Mr内的水平邻近点,得到点对集合M_{x, y}=\left\{\left(\boldsymbol{p}_i \in M_{\mathrm{s}}, \boldsymbol{q}_i \in M_{\mathrm{r}}\right)\right\}, 且i=1, 2, …, n。使用水平距离均方根误差构建第1级评价函数:
\begin{gathered} E\left(\alpha_{\mathrm{r}}, \alpha_{\mathrm{s}}, D \mid \delta_\alpha, \delta_D\right)=\frac{1}{n} \sum\limits_{i=1}^n \|\left[\boldsymbol{R}\left(0, 0, \alpha_{\mathrm{r}}-\alpha_{\mathrm{s}}\right) \boldsymbol{p}_i+\right. \\ \left.\boldsymbol{R}\left(0, 0, \alpha_{\mathrm{r}}\right) \boldsymbol{M}\right] \boldsymbol{n}-\boldsymbol{q}_i \boldsymbol{n} \|^2, \left(\boldsymbol{p}_i \in M_{\mathrm{s}}, \boldsymbol{q}_i \in M_{\mathrm{r}}\right) \end{gathered} (6) 式中: (pi, qi)表示Mx, y中第i对点;向量n =(1, 1, 0)T;符号“ ”表示在搜索间隔δα、δD下得到每一组(αr, αs, D);\|\cdot\|^2表示求范数,即点至原点的距离。选取函数值最小的Nr组参数并记录其对应转换参数R和t,然后使用迭代最近点(iterative closest point, ICP)算法[20]精化相应的转换参数,得到转换参数集合{(Rj, tj)}, 且j=1, 2, …, Nr。由于点云密度随距离增加而减小,同时遮挡随扫描距离而增多,导致树干位置点的精度通常随扫描距离增加而降低,因此本文中仅使用到原点水平距离不超过D的树干位置点参与ICP迭代。
1.3.2 第2级目标函数
使用每组转换参数(Rj, tj)对Ms进行坐标转换,然后基于互为最邻近点的方式搜索其在Mr内的3维邻近点,得到Mx, y, z={(pk∈Ms, qk∈Mr)}, 且k=1, 2, …, m。在此基础上,以对应点数目构建第2级评价函数:
\begin{gathered} N\left(\boldsymbol{R}_j, \boldsymbol{t}_j \mid \boldsymbol{\varepsilon}\right)=\sum\limits_{k=1}^m f\left(\left|\boldsymbol{R}_j \boldsymbol{p}_k+\boldsymbol{t}_j-\boldsymbol{q}_k\right| <\boldsymbol{\varepsilon}\right), \\ \left(\boldsymbol{p}_{k=1} \in M_{\mathrm{s}}, \boldsymbol{q}_k \in M_{\mathrm{r}}\right) \end{gathered} (7) 式中: (pk, qk)表示Mx, y, z中第k对点; m为点对数目; ε为距离阈值,表示对应位置点的最大允许偏差。本文中将ε设为0.2 m。当点对间距超过ε时,通过函数f(γ)将其标记为无效点对。
f(\gamma)=\left\{\begin{array}{l} 1, (\gamma=\text { true }) \\ 0, (\gamma=\text { false }) \end{array}\right. (8) 式中: \gamma=\left|\boldsymbol{R} \boldsymbol{p}_k+\boldsymbol{t}-\boldsymbol{q}_k\right| <\varepsilon ; N\left(\boldsymbol{R}_j, \boldsymbol{t}_j \mid \varepsilon\right)表示满足条件的邻近点对数目。最终取最大评价函数值对应的转换参数R *和t *作为最后的精配准结果。
\begin{gathered} \left\{\boldsymbol{R}^*, \boldsymbol{t}^*\right\}=\operatorname{argmax} N\left(\boldsymbol{R}_j, \boldsymbol{t}_j \mid \boldsymbol{\varepsilon}\right), \\ \left(j=1, 2, \cdots, N_{\mathrm{r}}\right) \end{gathered} (9) 若多组转换参数得到的临近点对数目相同,则取均方根误差最小的转换参数作为配准结果。
1.4 配准结果的精度评定
通过计算上述转换参数与参考值之间的差异进行精度评估。对配准结果,使用旋转矩阵R *可得x、y和z轴分别对应的旋转角,记为φe、ωe和κe; 将平移矩阵t *对应的分量记为tx, e、ty, e和tz, e,即沿x、y和z轴的平移分量。将旋转角和平移量的参考值分别记为φr、ωr、κr、tx, r、ty, r和tz, r,则本文中使用旋转角误差(rotation angle error, RAE)、水平平移误差(translation error, HTE)和竖直平移误差(vertical translation error, VTE)评估配准结果,分别用eRAE、eHTE和eVTE表示:
\left\{\begin{aligned} e_{\mathrm{RAE}} & =\frac{\left|\varphi_{\mathrm{e}}-\varphi_{\mathrm{r}}\right|+\left|\omega_{\mathrm{e}}-\omega_{\mathrm{r}}\right|+\left|\kappa_{\mathrm{e}}-\kappa_{\mathrm{r}}\right|}{3} \\ e_{\mathrm{HTE}} & =\sqrt{\left|t_{x, \mathrm{e}}-t_{x, \mathrm{r}}\right|^2+\left|t_{y, \mathrm{e}}-t_{y, \mathrm{r}}\right|^2} \\ e_{\mathrm{VTE}} & =\left|t_{z, \mathrm{e}}-t_{z, \mathrm{r}}\right| \end{aligned}\right. (10) 2. 结果与分析
2.1 实验数据介绍
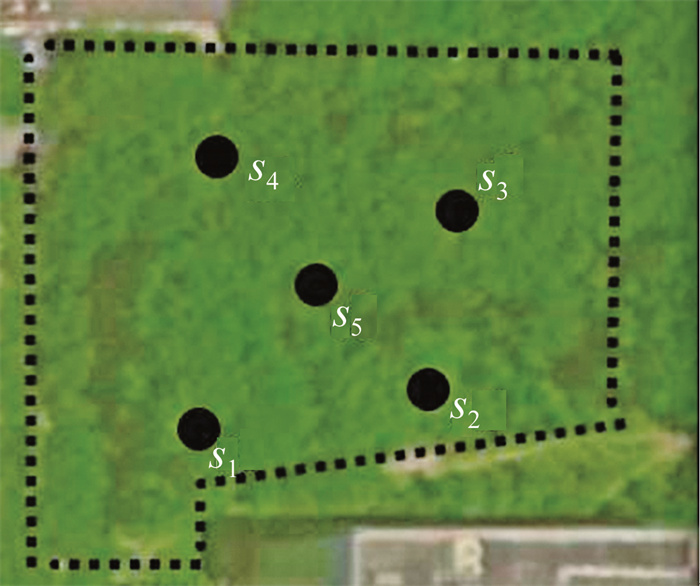
实验数据采集于湖北省武汉市某树林区域(30.53°N,114.35°E),采集时间为6月,在场景内部和边缘共架设5个测站,设站位置如图 2所示。场景树种以梧桐树和栾树为主,为每公顷370棵树的密度,并有少量灌木,地面以草类植物为主,并有少量步道、石桌、垃圾桶等人工地物,场景边缘有少量建筑物。扫描仪为Reigl-VZ400,角分辨率为0.04°,扫描视角为360°×100°,通过华为P20手机(集成单频定位模块)测量设站位置大地坐标和起始扫描方向的方位角,测站信息如表 1所示,定向误差通过与罗盘仪对比得到。
表 1 实验数据信息Table 1. Information of test datastation number of points trunk position count canopy thickness/m irientation error/(°) s1 22671334 214 3.3 11° s2 21586721 227 2 17° s3 24659841 186 7.3 5° s4 24208730 166 11.5 12° s5 24783758 259 9.5 54° 2.2 配准结果对比
将本文中的方法与参考文献[11]和参考文献[12]中的方法进行对比,结果如表 2所示。选取的6对测站间距分布在19 m~40 m,选取测站间重叠区域内的部分人造地物和裸露地面点,通过人工选取同名点并进行ICP精配准的方式得到转换参数参考值,用于精度评定。本文中方法的主要参数δα,δD和Nr分别设置为4°、1 m和1%×Nt(即式(5)所得参数组合总数的1%)。
表 2 配准结果对比Table 2. Comparison of registration resultss1-s5 s2-s5 s3-s5 s4-s5 s4-s1 s2-s4 mean station spacing reference/m 23 21 21 19 37 40 26.8 error/m 8.789 6.982 1.952 8.75 0.44 12.378 6.5 our method RAE/(′) 2.4 2 8.3 1.1 7.2 4.6 4.3 HTE/mm 3 9 9 11 11 7 8.3 VTE/mm 29 18 44 3 66 50 35 time/s 69 74 79 68 71 75 73 reference [11] RAE/(′) 18 22.5 8.1 6.4 18.2 29.4 17.1 HTE/mm 20 17 13 10 28 27 19.2 VTE/mm 151 36 59 40 116 158 93.3 time/s 18974 57070 12459 6380 827 4231 16657 reference [12] RAE/(′) 18.2 21.6 8.1 6.7 12.8 31.6 16.5 HTE/mm 20 19 9 11 24 19 17 VTE/mm 145 24 57 34 173 42 79 time/s 58 75 53 47 27 39 50 从配准精度看,参考文献[11]中方法与参考文献[12]中方法配准精度相近,本文中方法的整体配准精度高于三角匹配法,平均旋转角误差、水平和竖直平移误差分别为4.3′、8.3 mm和35 mm, 尤其在测站间距超过35 m时(s4-s1和s2-s4),本文中方法的精度仍然保持稳定,而三角匹配法的精度有明显降低。主要原因在于本文中的方法在粗配准的基础上使用测站间距对树干位置点进行了筛选,剔除了测站间距之外的树干位置点。考虑到已有研究的测站间距通常不高于25 m[6-10],本文作者通过智能手机辅助森林点云配准的方法提供了一种增大设站间隔、提高林下作业效率的可行思路。此外,本实验中测站间距误差为0.440 m~ 12.378 m,与参考文献[21]和参考文献[22]中得到的消费级定位设备的林下定位误差相符(最大定位误差为7 m~8 m,即对应最大测距误差为14 m~16 m),表明本文中方法可以在消费级定位设备的误差下为森林点云配准提供有效辅助信息。
从配准效率看,本文中方法的运行时间与参考文献[12]中方法相近且较为稳定,而参考文献[11]中方法的运行时间受单木数量影响较大,主要原因在于本文中的方法通过智能手机辅助信息构建搜索空间,计算量不受单木数量影响,而参考文献[11]中方法需要遍历所有单木以查找最佳匹配三元组,运行效率受单木数量影响较大。
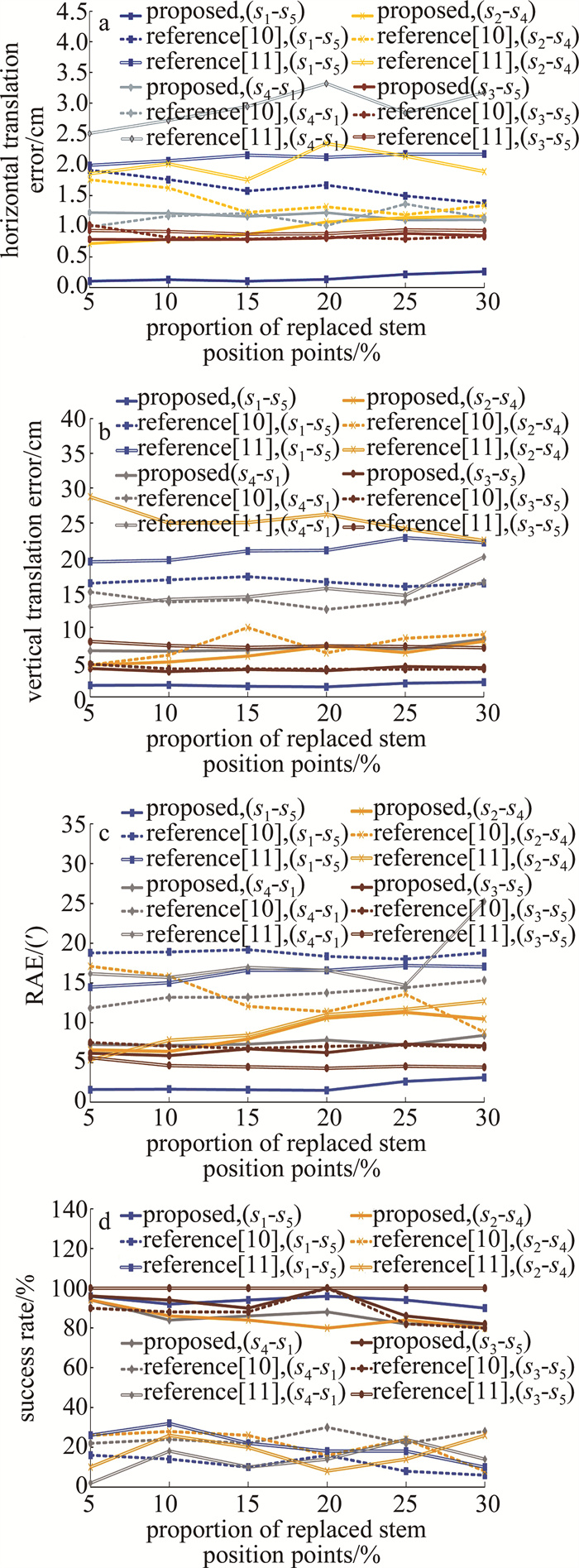
考虑到树干位置点提取存在漏检测和误检测,将一定比例的原始位置点替换为随机误差点,分别使用本文中方法、参考文献[11]中方法和参考文献[12]中方法进行配准,以对比两种方法的稳定性。对每个测站,使用6组替换比例值(5%~30%,间隔为5%)分别随机生成50组树干位置点集,然后选取4对测站s1-s5、s4-s1、s2-s4和s3-s5进行配准实验,每种方法共6×50×4=1200组配准实验,结果如图 3所示。实验结果与表 2中的结论相近,在不同的替换比例下, 本文中方法配准精度整体高于参考文献[11]中方法和参考文献[12]中方法(见图 3a~图 3c)。与参考文献[11]中方法相比,在添加随机随机误差后,参考文献[12]中方法的配准精度整体减小(见图 3a、图 3b),说明参考文献[12]中方法的配准结果受树干位置的漏检或误检影响较大。在图 3d中,本文中将水平平移误差、竖直平移误差和旋转角误差均不高于0.02 m、0.20 m和20′的结果记为正确配准,可得不同替换比例下的配准成功率。由结果可知,本文中方法的成功率高于三角匹配法,且不低于80%。
![图 3 不同替换比例下的配准结果]() 图 3 不同替换比例下的配准结果Figure 3. Registration results in terms of different replacement ratio of stem position points
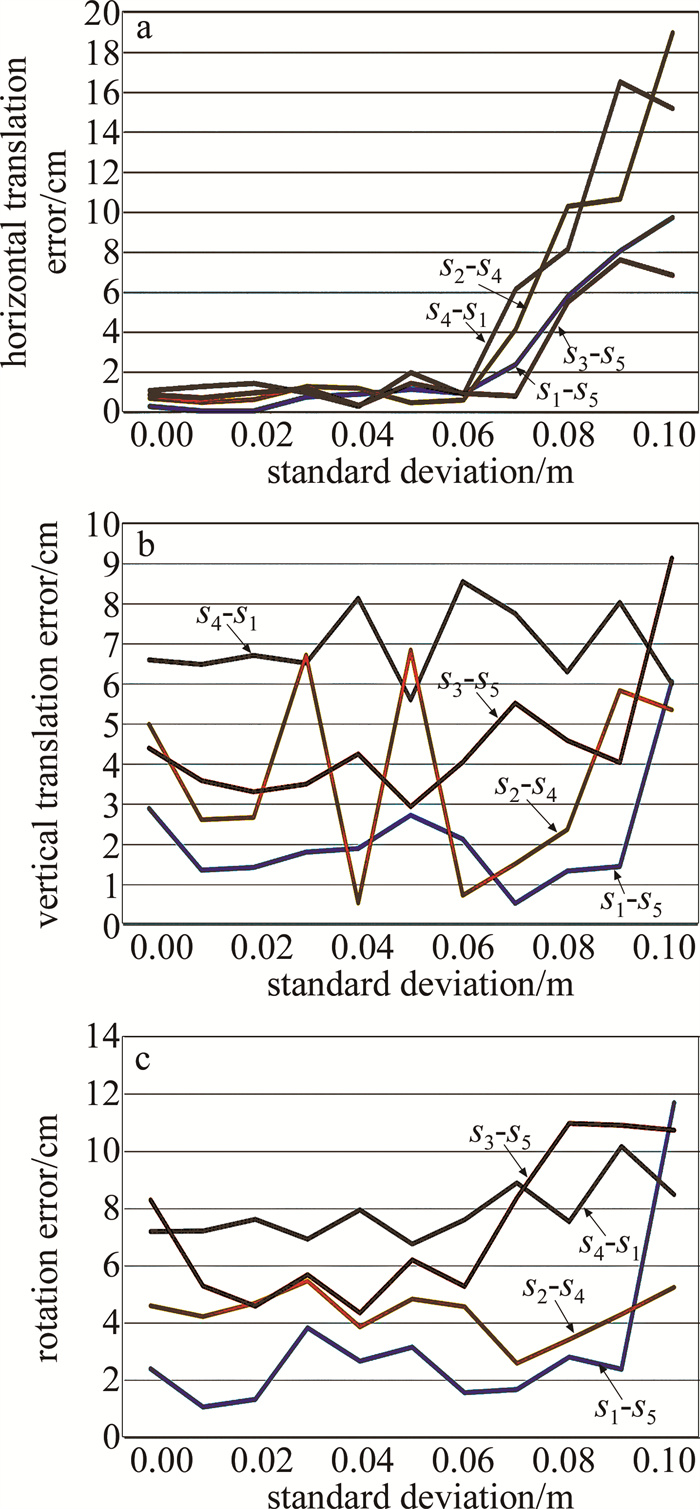
图 3 不同替换比例下的配准结果Figure 3. Registration results in terms of different replacement ratio of stem position points为研究本文中方法在不同精度激光雷达传感器数据条件下的精度,本文作者通过往树干点中添加不同标准差的高斯噪声来模拟更低精度的测量数据进行实验, 结果如图 4所示。可以看到,配准误差随噪声增加而呈现整体增加的趋势,其中水平误差受噪声影响最大;此外,对多数测站对,在标准差不超过0.06 m时,噪声对配准精度影响较小,超过0.06 m后,配准误差增加显著。证明对于一般精度测量型激光扫描仪所获取的数据,本文中方法仍能达到较高的配准精度。
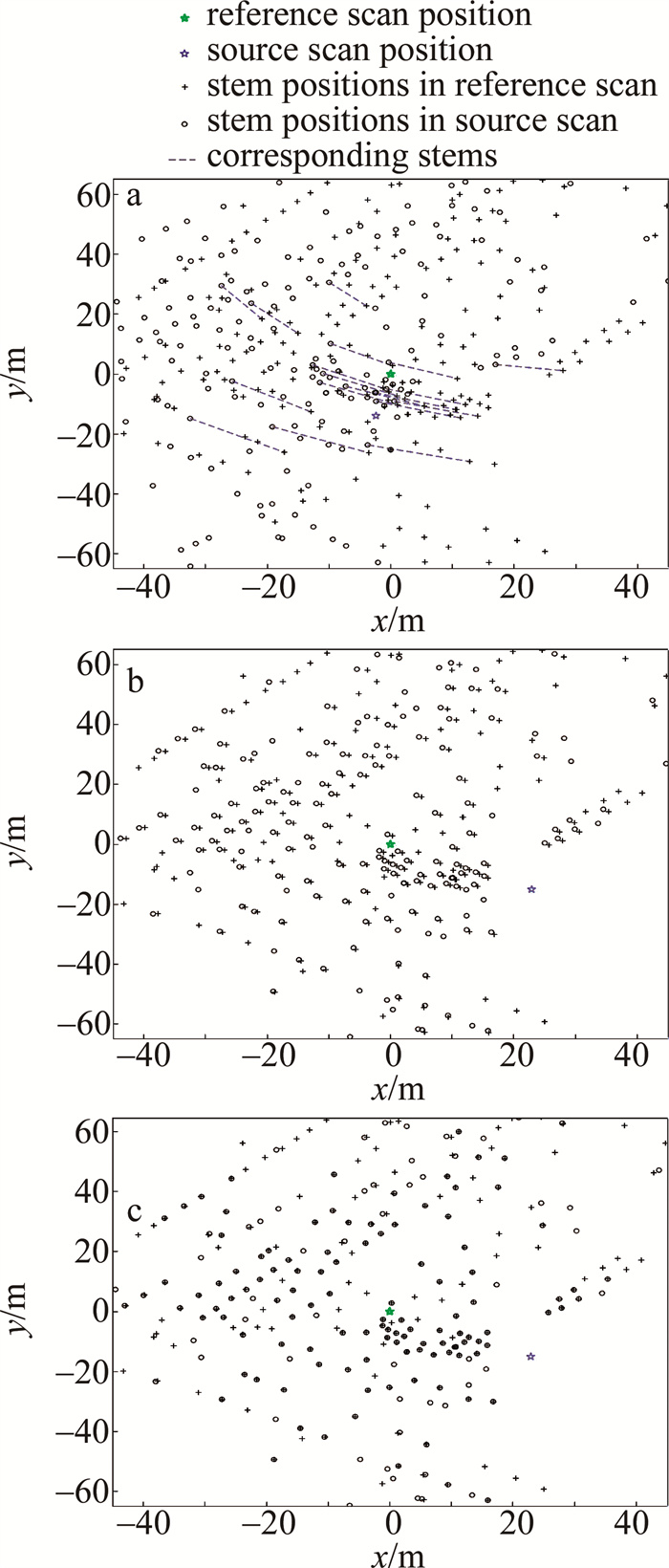
图 5以s1和s5测站为例,展示了本文中方法不同阶段的单木位置点拼合结果。可以看到, 位置点在配准后可以准确贴合。图 6展示了本文中方法得到的部分树干点轮廓的拼合效果。图中, 绿色为参考点云,蓝色为待配准点云。可以看到,本文中方法可以准确拼合重叠部分较少或无重叠部分的树干点,在测站(s2-s4)间距为40 m时可以取得和测站(s1-s5)间距为20 m相同的拼合效果。
![图 5 不同阶段的位置点拼合效果]() 图 5 不同阶段的位置点拼合效果a—粗配准b—第1级目标函数筛选后结果c—最终配准结果Figure 5. Alignment of stem positions at different stagesa—coarse registration b—result after evaluation of the first-level objective function c—final result
图 5 不同阶段的位置点拼合效果a—粗配准b—第1级目标函数筛选后结果c—最终配准结果Figure 5. Alignment of stem positions at different stagesa—coarse registration b—result after evaluation of the first-level objective function c—final result2.3 参数实验
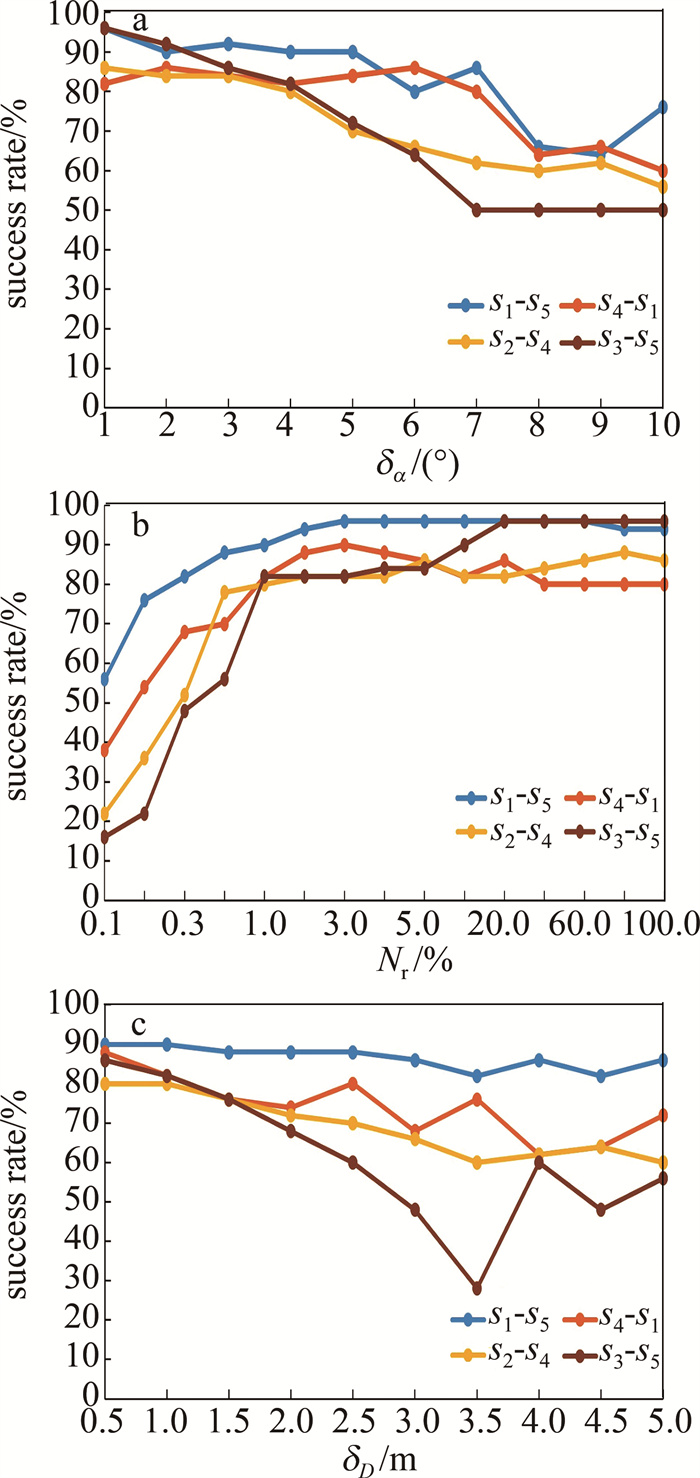
本文中方法共有3个参数需要设置:方位角搜索间距δα,测站搜索间距δD和参数总数目Nt(由式(5)得到)的固定比例Nr。图 7为不同参数设置对配准成功率的影响。选取4对测站s1-s5、s4-s1、s2-s4和s3-s5进行配准实验,每个测站使用第2.2节中替换比例30%的50组单木位置点集,共进行50×4=200组配准试验。由图 7可知,当δα和δD分别高于4°和1 m,且Nr取值不超过Nt的1%时,配准成功率变化较大,并随着δα和δD的增大而减小,随Nr的增大而增大。这是因为在越大的搜索间隔(δα、δD)下,得到定位定向真值的概率越小,而更大比例(Nr)的参数使误差更小,因此配准成功率越大。当δα和δD分别低于4°和1 m,且Nr取值超过Nt的1%时,3个参数对配准成功率的影响趋于平稳,这是由于配准精度达到一定限值。在第2.2节中,本文作者将3个参数分别设置为这3个临界值,以验证本文中方法的效率。同时可以看出,这3个值的确定是一个相对随机的过程,对于一般的智能手机所获取的定位定向数据(误差在同一数量级),本文中参数同样具有较大的参考价值。
3. 结论
本文中使用智能手机的定位定向数据和树干位置点实现森林点云的配准,通过手机定位定向数据得到粗配准参数, 并构建转换参数搜索空间,在搜索空间内对不同转换参数使用两级目标函数进行筛选, 得到最终配准结果。实验表明,智能手机在冠层厚度不大于11.5 m时,可以为森林点云配准提供有效辅助信息,同时本文中方法在测站间距由20 m增加至40 m时仍可以实现树干轮廓的准确拼合。因此,该方法可为森林数据采集时减少额外设备携带、扩展测站间距,进而为提高林下作业效率提供了一种可行思路。此外,对远距离(本文中为40 m)单木位置点的剔除可以有效提高配准精度。在后续工作中,智能手机定位定向数据在更厚冠层下的有效性仍需验证;同时本文中方法只使用了水平间距对树干位置点进行筛选,未来将探索使用多种因子对树干位置点进行筛选的方法。
-
![]()
图 1 使用定位和定向数据表示测站间的转换关系
Figure 1. Relation between two scans based on the positioning and orientation data
![]()
图 3 不同替换比例下的配准结果
Figure 3. Registration results in terms of different replacement ratio of stem position points
![]()
图 5 不同阶段的位置点拼合效果
a—粗配准b—第1级目标函数筛选后结果c—最终配准结果
Figure 5. Alignment of stem positions at different stages
a—coarse registration b—result after evaluation of the first-level objective function c—final result
表 1 实验数据信息
Table 1 Information of test data
station number of points trunk position count canopy thickness/m irientation error/(°) s1 22671334 214 3.3 11° s2 21586721 227 2 17° s3 24659841 186 7.3 5° s4 24208730 166 11.5 12° s5 24783758 259 9.5 54°  下载: 导出CSV
下载: 导出CSV
表 2 配准结果对比
Table 2 Comparison of registration results
s1-s5 s2-s5 s3-s5 s4-s5 s4-s1 s2-s4 mean station spacing reference/m 23 21 21 19 37 40 26.8 error/m 8.789 6.982 1.952 8.75 0.44 12.378 6.5 our method RAE/(′) 2.4 2 8.3 1.1 7.2 4.6 4.3 HTE/mm 3 9 9 11 11 7 8.3 VTE/mm 29 18 44 3 66 50 35 time/s 69 74 79 68 71 75 73 reference [11] RAE/(′) 18 22.5 8.1 6.4 18.2 29.4 17.1 HTE/mm 20 17 13 10 28 27 19.2 VTE/mm 151 36 59 40 116 158 93.3 time/s 18974 57070 12459 6380 827 4231 16657 reference [12] RAE/(′) 18.2 21.6 8.1 6.7 12.8 31.6 16.5 HTE/mm 20 19 9 11 24 19 17 VTE/mm 145 24 57 34 173 42 79 time/s 58 75 53 47 27 39 50
下载: 导出CSV
-
[1] 张昕怡, 陈茂霖, 刘祥江, 等. 顾及点密度与未知角分辨率的地面点云分类[J]. 激光技术, 2023, 47(1): 59-66. ZHANG X Y, CHEN M L, LIU X J, et al. Classification of terrestrial point cloud considering point density and unknown angular resolution[J]. Laser Technonogy, 2023, 47(1): 59-66(in Chinese).
[2] LIANG X, LITKEY P, HYYPPA J, et al. Automatic stem mapping using single-scan terrestrial laser scanning[J]. IEEE Transactions on Geoence & Remote Sensing, 2012, 50(2): 661-670. http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=5991946
[3] 刘祥江, 陈茂霖, 张昕怡, 等. 结合单点分类与改进均值漂移聚类的地面激光点云单木检测[J]. 测绘地理信息, 2024, 49(3): 53-58. LIU X J, CHEN M L, ZHANG X Y, et al. Single stem extraction from ground laser point cloud based on point classification and improved mean shift clustering[J]. Journal of Geomatics, 2024, 49(3): 53-58(in Chinese).
[4] 路璐, 郑光, 马利霞. 激光雷达和点云切片算法结合的森林有效叶面积指数估算[J]. 遥感学报, 2018, 22(3): 432-449. LU L, ZHENG G, MA L X. Combining point cloud slicing and terrestrial laser scanning data to retrieve an effective leaf area index[J]. Journal of Remote Sensing, 2018, 22(3): 432-449(in Chinese).
[5] 卢晓艺, 云挺, 薛联凤, 等. 基于树木激光点云的有效特征抽取与识别方法[J]. 中国激光, 2019, 46(5): 0510002. LU X Y, YUN T, XUE L F, et al. Effective feature extraction and identification method based on tree laser point cloud[J]. Chinese Journal of Lasers, 2019, 46(5): 0510002(in Chinese).
[6] YANG X, STRAHLER A H, SCHAAF C B, et al. Three-dimensional forest reconstruction and structural parameter retrievals using a terrestrial full-waveform lidar instrument (Echidna)[J]. Remote Sensing of Environment, 2013, 135: 36-51. DOI: 10.1016/j.rse.2013.03.020
[7] CALDERS K, BURT A, ORIGO N, et al. Large-area virtual forests from terrestrial laser scanning data[C]//2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS). New York, USA: IEEE Press, 2016: 1765-1767.
[8] LIANG X, HYYPPA J. Automatic stem maping by merging several terrestrial laser scans at the feature and decision levels[J]. Sensors, 2013, 13(2): 1614-1634. DOI: 10.3390/s130201614
[9] LIU J B, LIANG X L, HYYPPA J, et al. Automated matching of multiple terrestrial laser scans for stem mapping without the use of artificial references[J]. International Journal of Applied Earth Observation and Geoinformation, 2017, 56: 13-23. DOI: 10.1016/j.jag.2016.11.003
[10] KELBE D, AARDT J V, ROMANCZYK P, et al. Marker-free registration of forest terrestrial laser scanner data pairs with embedded confidence metrics[J]. IEEE Transactions on Geoence & Remote Sensing, 2016, 54(7): 4314-4330. http://smartsearch.nstl.gov.cn/paper_detail.html?id=a3ce6fe3d8711c729e012519b91f529a
[11] TREMBLAY J F, BELAND M. Towards operational marker-free registration of terrestrial lidar data in forests[J]. ISPRS Journal of Photogrammetry & Remote Sensing, 2018, 146: 430-435. http://www.xueshufan.com/publication/2898894047
[12] JIN Z, CHEN M, JI C, et al. Marker-free registration of terrestrial laser scanning data under forest with stem position triplet matching based on kd-tree[C]//2022 IEEE International Geoscience and Remote Sensing Symposium. New York, USA: IEEE Press, 2022: 7507-7510.
[13] DAI W X, YANG B Sh, LIANG X L, et al. Fast registration of forest terrestrial laser scans using key points detected from crowns and stems[J]. International Journal of Digital Earth, 2020, 13(12): 1585-1603. DOI: 10.1080/17538947.2020.1764118
[14] GUAN H C, SU Y J, SUN X L, et al. A marker-free method for registering multi-scan terrestrial laser scanning data in forest environments[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 166: 82-94. http://hub.hku.hk/handle/10722/283325
[15] NI W, SUN G, GUO Z, et al. A method for the registration of multiview range images acquired in forest areas using a terrestrial laser scanner[J]. International Journal of Remote Sensing, 2011, 32(24): 9769-9787.
[16] ZHANG W, CHEN Y, WANG H, et al. Efficient registration of terrestrial LiDAR scans using a coarse-to-fine strategy for forestry applications[J]. Agricultural & Forest Meteorology, 2016, 225: 8-23.
[17] 浦石, 李京伟, 郭四清. 融合语义特征与GPS位置的地面激光点云拼接方法[J]. 测绘学报, 2014, 43(5): 545-550. PU Sh, LI J W, GUO S Q. Registration of terrestrial laser point cloud by fusing semantic features and GPS positions[J]. Acta Geodaetica et Cartographica Sinica, 2014, 43(5): 545-550(in Chinese).
[18] 韩江涛, 谭凯, 张卫国, 等. 协同随机森林方法和无人机LiDAR空谱数据的盐沼植被"精灵圈"识别[J]. 光电工程, 2024, 51(3): 230188. HAN J T, TAN K, ZHANG W G, et al. Identification of salt marsh vegetation "fairy circles" using random forest method and spatial-spectral data of unmanned aerial vehicle LiDAR[J]. Opto-Electronic Engineering, 2024, 51(3): 230188(in Chinese).
[19] CHEN M L, WAN Y C, WNAG M W, et al. Automatic stem detection in terrestrial laser scanning data with distance-adaptive search radius[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(5): 2968-2979. http://www.xueshufan.com/publication/2794248050
[20] BESL P J, MCKAY H D. A method for registration of 3-D shapes[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 1992, 14(2): 239-256. http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=121791
[21] ANDERSEN H E, CLARKIN T, WINTERBERGER K, et al. An accuracy assessment of positions obtained using survey-and recreational-grade global positioning system receivers across a range of forest conditions within the Tanana Valley of interior Alaska[J]. Western Journal of Applied Forestry, 2009, 24(3): 128-136. http://www.cabdirect.org/abstracts/20113110143.html
[22] KAARTINEN H, HYYPPA J, VASTARANTA M, et al. Accuracy of kinematic positioning using global satellite navigation systems under forest canopies[J]. Forests, 2015, 6(9): 3218-3236. http://tuhat.helsinki.fi/portal/services/downloadRegister/57947960/forests_06_03218.pdf

计量
- 文章访问数: 3
- HTML全文浏览量: 0
- PDF下载量: 1