
LiDAR point cloud radius filtering based on genetic algorithm
-
摘要:
点云降噪对激光雷达成像系统的精度至关重要。为了降低由接收器、多径效应、外部干扰和大气扰动引起的噪声,采用基于遗传算法的半径滤波进行降噪,通过遗传算法优化了半径滤波的关键参数(过滤半径和近邻阈值)。结果表明,在简单与复杂场景中,该算法保持了去噪精度和点保留率,同时提高了噪声召回率;复杂环境下噪声召回率比半径滤波提高了约21%,比统计滤波提升了约16%。该方法为激光雷达数据的处理提供了一种新颖有效的解决方案,对于提高激光雷达成像质量、提升数据处理效率以及自动化分析具有较为重要的应用价值。
Abstract:Point cloud noise reduction is crucial to the accuracy of light detection and ranging(LiDAR) imaging systems. In order to reduce the noise caused by receiver, multipath effect, external interference and atmospheric disturbances, a radius filtering method based on genetic algorithm was used for noise reduction, which optimized the key parameters of radius filtering (filtering radius and nearest-neighbor thresholds) by genetic algorithm. Validation in simple and complex scenes show that, the algorithm maintains denoising accuracy and point retention in simple scenes while slightly improving noise recall. The noise recall in complex scenes is improved by about 21% over traditional radius filtering and about 16% over statistical filtering, which is useful for point cloud radius filtering. The radius filtering based on genetic algorithm provides a novel and effective method for LiDAR data processing, which is valuable for improving the quality of LiDAR imaging.
-
Keywords:
- imaging system /
- noise reduction /
- genetic algorithm /
- point cloud
-
0. 引言
点云降噪是成像激光雷达(light detection and ranging, LiDAR)信号降噪的关键。为了去除数据中的噪声或异常点,从而使点云数据更加干净、准确和可靠,科研人员对各种降噪方法展开了研究。
DIGNE等人[1]设计了一种考虑点到相邻点的距离、沿法线方向的距离的双边滤波器,以更好地保留清晰的边缘。CARRILHO等人[2]提出的细胞直方图滤波器和CHARRON等人[3]提出的动态半径异常值去除滤波器, 旨在解决错误去除有效环境的问题,但只在一种环境中进行了测试。JIN等人[4]提出了一种统计滤波与双边滤波相结合的降噪方法,能够有效去除激光点云数据中的异常值。WANG等人[5]通过不规则三角网渐进加密滤波算法对单次和末次回波融合的点云进行滤波,较好地保留了地形细节。LIU等人[6]综合了体素滤波和半径滤波,构建大、小半径模型以实现自适应化,能够有效去除激光点云数据中的漂移噪声。WEN等人[7]利用双边滤波对自动驾驶场景下的点云数据进行了降噪研究,为其他领域的点云信号处理提供了重要参考。
与此同时,研究人员提出了其他创新型算法[8-10]。MATTEI等人[11]利用移动鲁棒主成分分析法,在具有大量异常值的数据中通过计算局部平均值进行去噪。KIM等人[12]提出一种基于图的空间聚类技术,采用德劳内三角测量和基于密度的噪声应用空间聚类(density-based spatial clustering of applications with noise,DBSCAN)机制,保持了更好的聚类和相邻簇的可分性。LIU等人[13]也利用DBSCAN精化激光雷达所接收到的山区道路点云,顺利去除噪声点。HUANG等人[14]提出一种基于粒子群优化算法的自动光子云过滤算法,所提出的噪声过滤算法通过在森林区域上空同一路线上不同激光指向和光束类型下的数据实验进行了验证。REN等人[15]提出用高斯滤波器对信号强度值进行处理,并采用DBSCAN去除噪声点和边界点。LI等人[16]提出一种基于多级分辨率算法的自适应滤波,建立八叉树和树形数据结构(k-dimensional tree,KD tree)的双索引结构对基准面的网格分辨率进行自适应调整。WEI等人[17]提出了一种结合DBSCAN和统计滤波的点云降噪算法,求取点云密度进行粗降噪后再利用所提出算法进行精降噪,结果表明该算法性能较为优秀。DUAN等人[18]提出基于主成成分分析的自适应聚类,通过提取原始数据的第一成分和第二成分进行降维,从而对2维数据进行聚类降噪,降低了点云降噪的复杂度。CHENG等人[19]也采用了降维的思想,对地面数据构建KD树进行分割,并使用基于k最近邻(k-nearest neighbor,KNN)的分割方法进行精细降噪。
综上所述,研究者们在点云降噪领域采用了多种创新性方法,以不断提高降噪精度和处理效率,为点云应用提供了强有力的支持。传统的滤波方法虽然在一些场景中取得了不错的效果,但其参数选择通常依赖于人工经验,且需要大量的反复试验,这不仅浪费了大量的人力资源,还使得在某些复杂环境中,噪声召回率未能达到理想水平。因此,本文作者在前人研究的基础上,提出了一种基于遗传算法的半径滤波点云降噪(genetic algorithm-radius outlier removal, GA-ROR)方法。该方法能够自动优化半径和邻近点阈值,避免了传统方法中人为干预的不足。通过对性能指标的评估,确保算法在不同场景下的高效性和适应性。
1. 半径滤波
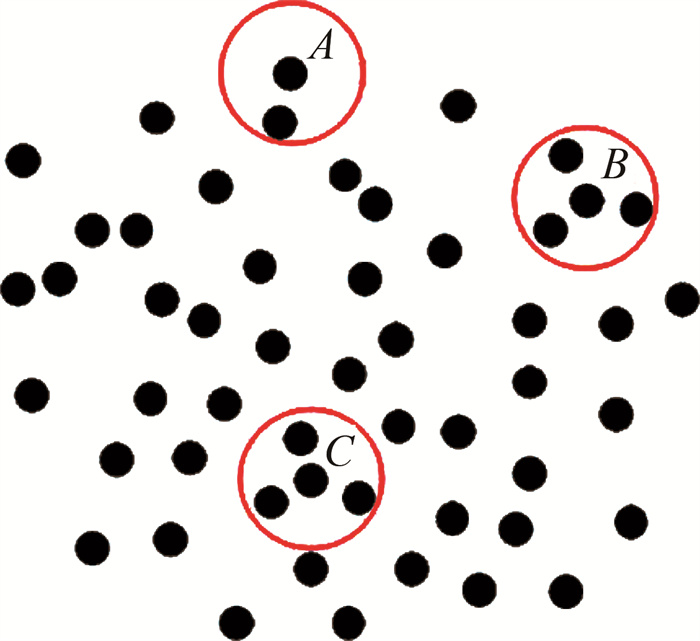
半径滤波(radius outlier removal, ROR)基于点云中每个数据点周围是否有足够数量的邻近点。若在指定的半径范围内,给定点周围的邻近点数量满足预定的阈值条件,保留该点;否则,该点被视为离群点并被移除[20]。具体步骤为:(a)确定半径和阈值。根据点云的特征和应用场景,确定半径值和相邻点数阈值, 对于点云中的每个数据点,计算其半径范围内(以该点为圆心)的邻域点数量;(b)标记核心点和噪声点。如果相邻点的数量大于或等于预定阈值,则将该点标记为信号点; 如果相邻点的数量小于阈值或等于0,则将该点标记为噪声点;(c)去除噪声点。从点云中去除标记的噪声数据点,保留核心点和边界点。
如图 1所示,在给定半径范围内,A点的邻近点为1,B点的邻近点为3,C点的邻近点为3,若阈值为2,则保留B点和C点,滤除A点。
2. 基于GA-ROR的激光雷达点云降噪
2.1 GA-ROR算法流程
半径滤波作为一种基于离群点的点云降噪算法,具有简单易懂和较快的运算速度的优势,同时能够有效保留点云数据的结构和形状特性。然而,在复杂的激光雷达成像应用场景中,噪声类型广泛,导致所获取的点云数据量庞大。传统半径滤波的两个输入参数需要通过反复试验来确定,这会耗费大量的精力。
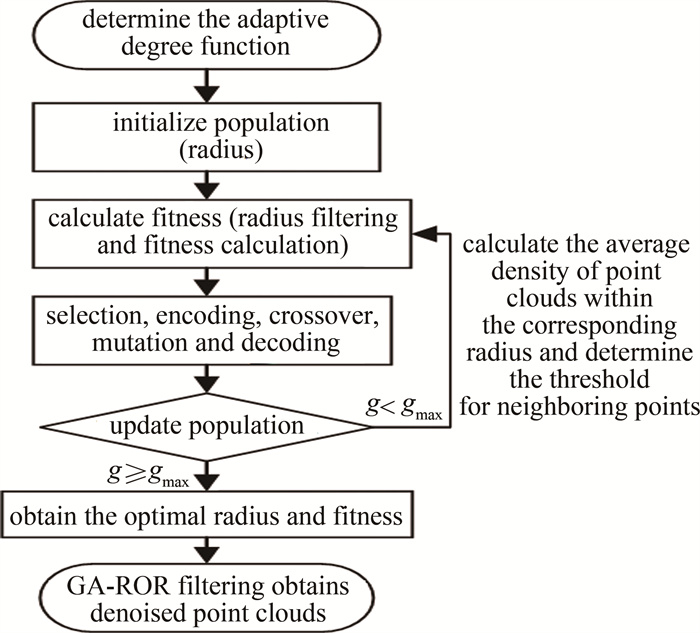
为了弥补传统半径滤波算法的不足,本文作者提出了一种利用遗传算法进行参数优化的半径滤波方法。首先通过遗传算法寻找最优滤波半径,然后利用该半径计算点云密度, 根据平均点云密度确定邻近点阈值,从而优化半径滤波参数。这一改进能够在提高降噪效果的同时,更高效地适应各类复杂场景,减轻了手动参数调整的负担。具体方案内容如图 2所示。图中,g为循环中的当前迭代次数,gmax为最大迭代次数。
该算法首先通过随机生成一组个体表示半径滤波的初始参数,通过适应度函数对各个体评估,对适应度较高的父代执行交叉和变异,进而产生新的参数个体。在迭代过程中,种群持续更新,最终收敛到适应度最优的个体,从而获得最优化的半径滤波参数组合。该方法的优势在于通过遗传算法的全局优化能力,自动调整参数以适应不同场景,从而提高降噪效果。
2.2 确定适应度函数
信噪比(signal-to-noise ratio, SNR)是用于度量信号与噪声之间强度或清晰度的指标, 可表示为信号与噪声功率之比:
RSNR=10×lg(NsNn) (1) 式中: Ns、Nn为信号与噪声点个数。当RSNR为正,表示信号功率高于噪声功率;若为负, 则表示信号功率低于噪声功率。
理想的滤波效果基于较高信噪比以及尽少过滤掉携带有效信息的信号,故适应度函数公式定义如下:
F=RSNR×Cs (2) 式中: Cs为留下的点云信号数量。在这种设计下,通过最大化适应度值,旨在同时实现最大的信噪比和保留最多的信息。确保在优化过程中取得的最优解既具有较高的信噪比,反映了信号相对于噪声的强度,而且对有用信息的保留也能达到最大化,使问题的实际需要得到更好的满足。
2.3 种群初始化及适应度计算
pi为种群中各个体的各维度的第i个初始化值,其取值范围为:
a⩽ (3) 式中: a和b为限制倍数,根据点云坐标单位的尺度进行适当放大或者缩小而取值,本文中兔子与马的模型取a=0.001, b=0.05;真实住宅区域取a=1, b=0.5;D为欧氏距离,设m和n为点云Q中任意两点,则点m与点n之间的欧氏距离为:
D=\sqrt{\left(x_m-x_n\right)^2+\left(y_m-y_n\right)^2+\left(z_m-z_n\right)^2} (4) 式中: (xm, ym, zm)、(xn, yn, zn) 分别为点m和点n的3维坐标。
通过生成0~1之间的随机数,并根据指定的取值范围进行线性映射,确保种群中各个体的维度值均匀分布于预定的范围内。对初始化的种群计算适应度,其求解过程见下。
(a) 代入初始种群实现半径滤波,其中邻近点阈值[21]为:
N_{\mathrm{th}}=\frac{k}{N} \sum\limits_{i=1}^N N_i(r) (5) 式中:N为点云总数; k为阈值参数,取k=0.3;Ni(r)为第i个点云在半径为r内的邻近点数。
(b) 分别计算滤波后的点云数据中信号点和噪声点的数量等效为信号功率和噪声功率。
(c) 根据第2.2节中的公式计算初始种群的适应度值。
2.4 选择、交叉及变异
选择功能由轮盘赌算法执行:将个体的适应度值归一化为概率值,并依据该概率构建累积分布函数,其计算公式如下所示:
P(i)=\frac{F(i)}{\sum\limits_i^N F(i)} (6) 式中:F(i)表示各个体对应的适应度值。
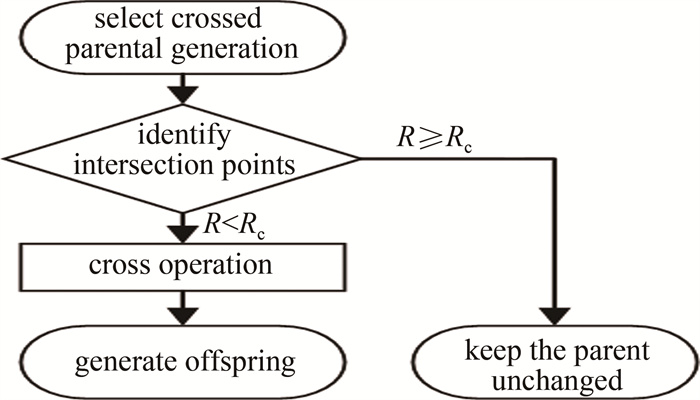
接着在每一轮选择中生成一个随机数,在概率分布函数中确认第1个大于随机数的索引。重复进行这个过程,直到选择满足选择率要求的个体数目,这些个体被复制到下一代种群中,完成了选择功能。通过单点交叉操作随机选择两个父代个体并确定交叉点。在设定的交叉概率下,当随机数小于该概率时,对父代个体的基因序列进行分割,交换部分基因信息,生成新的个体,并将其加入到下一代种群中。通过这种方法实现基因信息交换,从而在进化过程中促进种群持续优化,并维持种群的多样性。
这种方式实现了个体基因信息的交叉交换,促进了种群在进化过程中的持续优化,同时保障了基因信息的有效传递和保持了种群多样性。选择、交叉的流程如图 3所示。图中,R为随机数,Rc为遗传中设定的交叉率。
变异类似于交叉,随机选择交叉后的个体,随机确定变异点,通过比较随机数和变异率来决定是否执行取反基因值变异操作,最后将变异后的个体编码更新到种群中的相应位置。遗传过程中的随机性增强了个体基因组合的多样性,提升了种群的搜索能力。这种方式有助于防止过度早期陷入局部最优,从而促进全局寻优。
2.5 编码和解码
在编码阶段,原始的实数种群中的数值先乘以数量级单位映射到整数范围,从而转换为二进制。解码阶段首先将二进制编码转换为整数,该整数再除以映射的数量级单位,还原为原始实数种群中的数值。通过这种扩大实数精度的编码和解码过程,可以增加遗传算法搜索空间的精度,提高算法的准确性和可靠性。
2.6 滤波
重复上述步骤,当遗传算法达到预设的最大迭代次数gmax时,得到每一代中的最优适应度值和对应的最优个体,所需的滤波半径即为所有最优适应度值中的最大值所对应的最优个体。通过第2.3节中的式(5)计算出该半径所对应的邻近点阈值。最后,将得到的最优滤波半径和邻近点阈值应用到半径滤波中,完成基于遗传算法的半径滤波。
3. 实验及结果分析
首先,选取斯坦福数据库中的兔、马模型[22],对其原始点云数据中添加均值为0、标准差为0.1的高斯噪声,生成带噪声的点云。其次,使用美国国家科学基金会(National Science Foundation, NSF)提供的公开住宅区域点云数据[23]进行进一步测试。实验中使用的数据仅包含点云相对于激光器位置的坐标。
3.1 实验参数及结果
通过多轮实验,确定兔子模型在半径滤波和统计滤波中表现最佳的4组参数, 如表 1和表 2所示。
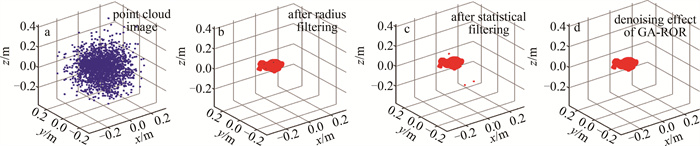
表 1 半径滤波参数Table 1. Parameters for radius filteringradius/m neighbors noise RSNR/dB the remaining points 0.002 3 1988 31.4137 16629 0.0025 3 1982 30.2846 19237 0.003 3 1974 28.8305 19888 0.0035 3 1970 28.2367 20019 表 2 统计滤波参数Table 2. Parameters for statistical filteringthreshold/m neighbors noise RSNR/dB the remaining points 0.001 5 1991 32.5452 16181 0.0015 5 1983 30.4387 18824 0.002 5 1977 29.1999 19153 0.0025 5 1964 27.2596 19190 随着半径和距离阈值的增大,半径滤波和统计滤波除去的噪声点数量逐步减少,但同时信噪比也有所下降。分别选择相近信噪比即为30.2846 dB和30.4387 dB的参数进行半径滤波和统计滤波,带噪的兔子点云图及各算法降噪后的结果如图 4所示。
![图 4 带噪兔子模型的点云图以及滤波之后的效果]() 图 4 带噪兔子模型的点云图以及滤波之后的效果Figure 4. Point cloud image of noisy rabbit model and the effect image after filtering
图 4 带噪兔子模型的点云图以及滤波之后的效果Figure 4. Point cloud image of noisy rabbit model and the effect image after filtering为进一步验证算法的可行性,将算法应用在小马的点云模型上,各滤波算法降噪结果如图 5所示。
![图 5 带噪小马模型的点云图以及滤波之后的效果]() 图 5 带噪小马模型的点云图以及滤波之后的效果Figure 5. Point cloud image of noisy horse model and the effect image after filtering
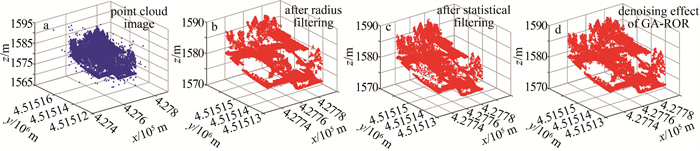
图 5 带噪小马模型的点云图以及滤波之后的效果Figure 5. Point cloud image of noisy horse model and the effect image after filtering从图 5可以看出,统计滤波去噪后仍残留少量噪声,其余算法方法则表现出了较为显著的降噪效果。为了深度评估算法在复杂环境中的性能,选取由NSF提供的居民区复杂点云进行测试。图 6a展示了带噪点云(共31870个点),图 6b~图 6d展示了各算法降噪后的结果。
![图 6 带噪住宅模型的点云图以及滤波之后的效果]() 图 6 带噪住宅模型的点云图以及滤波之后的效果Figure 6. Point cloud image of noisy residential model and the effect image after filtering
图 6 带噪住宅模型的点云图以及滤波之后的效果Figure 6. Point cloud image of noisy residential model and the effect image after filtering从图 6可以观察到,在复杂场景下,半径滤波较于统计滤波有效减少了漂移噪声,但由于过度滤波导致部分有效信号点丧失,特别是树木轮廓的细节被削弱。与此不同,本文中提出的算法较好地保留了房屋和树木的空间结构,并显著降低了漂移噪声的残留。
3.2 评价和分析
引入降噪精确率Pd、噪声召回率Rd、原点保留率Ro对各滤波算法的去噪程度进行对比[24]。以斯坦福兔子模型为例计算各评价指标,其各类变量数值如表 3所示,表 4中列出了各算法在兔子模型中降噪评价指标结果。表中,SOR(statistical outlier removal)表示统计滤波,Nq为过滤噪声数,Ng为噪声总数,Ny为过滤点去云总数,No为剩余点云中信号点数,Nf为滤后点数。
表 3 兔子模型各滤波算法的结果Table 3. Results of the rabbit model with various filtering algorithmsalgorithm Nq Ng Ny No Nf RSNR/dB ROR 1982 2000 2763 19219 19237 30.2846 SOR 1983 2000 2847 18807 18824 30.4387 GA-ROR 1982 2000 2498 19484 19502 30.3441 表 4 兔子模型降噪评价指标Table 4. Evaluation metrics for denoising results of rabbit modelalgorithm Pd Rd Ro ROR 0.9910 0.7173 0.9991 SOR 0.9915 0.6965 0.9991 GA-ROR 0.9910 0.7934 0.9991 在降噪精度方面,半径滤波和统计滤波降噪后的点云噪声数量较少,但噪声召回率相对较低,部分噪声点未被充分辨识和去除。相比之下,本文中提出的算法在确保较高精度的同时提高了噪声点的召回率,维持在90%以上,且保持了较好的信号点保留率,具有较好的综合性能。
住宅模型经过不同算法滤波后的点云数据如表 5所示,经各类算法降噪后的居民区点云评估指标如表 6所示。在住宅场景中,由于目标物体与噪声种类较为复杂,容易与有效信号混淆,其噪声召回率相比有所下降。本文中提出的算法相比半径滤波和统计滤波,能够在确保降噪精度率和信号保留率的前提下,其噪声召回率分别提高约0.21和0.16,均提高了80%以上。
表 5 住宅模型各滤波算法结果Table 5. Results of residential model with various filtering algorithmsalgorithm Nq Ng Ny No Nf ROR 1772 2000 5388 26254 26482 SOR 1588 2000 4217 27241 27653 GA-ROR 1609 2000 2995 28434 28825 表 6 住宅模型降噪评价指标Table 6. Evaluation metrics for denoising results of residential modelalgorithm Pd Rd Ro ROR 0.8860 0.3289 0.9914 SOR 0.7940 0.3766 0.9851 GA-ROR 0.8045 0.5372 0.9864 通过各项性能指标的综合分析,本文中的算法能够在无需多次参数调试的情况下完成降噪,并显著提升噪声召回率,增强降噪效果。
4. 结论
研究了在点云处理中使用遗传算法进行半径滤波的方法,并通过对比实验证明了其有效性。遗传算法能够根据预定义的适应度函数找到适应于不同数据集和场景的优秀参数组合,从而更好地适应不同噪声水平和点云特征。这种自动优化避免了重复调整参数的繁琐过程,提高了点云处理的效率。实验证明,相比于传统的手动调整参数,使用遗传算法能够更有效地降低噪声,提高点云的质量,保证降噪精确率和原点保留率,并提高噪声召回率。在简单模型中降噪精确率和原点保留率均能维持在90%以上,在复杂模型中也能保持在80%以上。基于遗传算法的半径滤波为点云数据降噪提供了一种自适应、自动化的解决方案,为相关领域的研究和应用提供了支持。
-
![]()
图 4 带噪兔子模型的点云图以及滤波之后的效果
Figure 4. Point cloud image of noisy rabbit model and the effect image after filtering
![]()
图 5 带噪小马模型的点云图以及滤波之后的效果
Figure 5. Point cloud image of noisy horse model and the effect image after filtering
![]()
图 6 带噪住宅模型的点云图以及滤波之后的效果
Figure 6. Point cloud image of noisy residential model and the effect image after filtering
表 1 半径滤波参数
Table 1 Parameters for radius filtering
radius/m neighbors noise RSNR/dB the remaining points 0.002 3 1988 31.4137 16629 0.0025 3 1982 30.2846 19237 0.003 3 1974 28.8305 19888 0.0035 3 1970 28.2367 20019  下载: 导出CSV
下载: 导出CSV
表 2 统计滤波参数
Table 2 Parameters for statistical filtering
threshold/m neighbors noise RSNR/dB the remaining points 0.001 5 1991 32.5452 16181 0.0015 5 1983 30.4387 18824 0.002 5 1977 29.1999 19153 0.0025 5 1964 27.2596 19190
下载: 导出CSV
表 3 兔子模型各滤波算法的结果
Table 3 Results of the rabbit model with various filtering algorithms
algorithm Nq Ng Ny No Nf RSNR/dB ROR 1982 2000 2763 19219 19237 30.2846 SOR 1983 2000 2847 18807 18824 30.4387 GA-ROR 1982 2000 2498 19484 19502 30.3441
下载: 导出CSV
表 4 兔子模型降噪评价指标
Table 4 Evaluation metrics for denoising results of rabbit model
algorithm Pd Rd Ro ROR 0.9910 0.7173 0.9991 SOR 0.9915 0.6965 0.9991 GA-ROR 0.9910 0.7934 0.9991
下载: 导出CSV
表 5 住宅模型各滤波算法结果
Table 5 Results of residential model with various filtering algorithms
algorithm Nq Ng Ny No Nf ROR 1772 2000 5388 26254 26482 SOR 1588 2000 4217 27241 27653 GA-ROR 1609 2000 2995 28434 28825
下载: 导出CSV
表 6 住宅模型降噪评价指标
Table 6 Evaluation metrics for denoising results of residential model
algorithm Pd Rd Ro ROR 0.8860 0.3289 0.9914 SOR 0.7940 0.3766 0.9851 GA-ROR 0.8045 0.5372 0.9864
下载: 导出CSV
-
[1] DIGNE J, FRANCHIS C D. The bilateral filter for point clouds[J]. Image Processing on Line, 2017, 7: 278-287. DOI: 10.5201/ipol.2017.179
[2] CARRILHO A C, GALO M, SANTOS R C. Statistical outlier detection method for airborne lidar data[C]//The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. New York, USA: International Society for Photogrammetry and Remote Sensing, 2018: 87-92.
[3] CHARRON N, PHILLIPS S, WASLANDER S L. De-noising of lidar point clouds corrupted by snowfall[C]//15th Conference on Computer and Robot Vision. New York, USA: IEEE Press, 2018: 254-261.
[4] JIN Y X, YUAN X T, WANG Zh, et al. Filtering processing of LiDAR point cloud data[C]//5th IOP Conference Series: Earth and Environmental Science. New York, USA: IEEE Press, 2021: 012125.
[5] 王云云, 唐菲菲, 王章朋, 等. 植被茂密地区点云双重滤波方法研究[J]. 激光技术, 2022, 46(2): 233-238. WANG Y Y, TANG F F, WNAG Zh P, et al. Research on dual filter-ing method for point cloud in dense vegetation areas[J]. Laser Technology, 2022, 46(2): 233-238(in Chinese).
[6] 柳斌, 李雪梅. 一种基于激光雷达点云的自适应双半径滤波算法[J]. 兵工学报, 2023, 44(9): 2768-2777. LIU B, LI X M. An adaptive dual radius filtering algorithm based on LiDAR point cloud[J]. Acta Armamentarii, 2023, 44(9): 2768-2777(in Chinese).
[7] WEN G Q, ZHANG H X, GUAN Zh W, et al. Bilateral filter denoising of LiDAR point cloud data in automatic driving scene[J]. Infrared Physics & Technology, 2023, 131: 104724. DOI: 10.1016/j.infrared.2023.104724
[8] 李婕, 李青清, 李礼, 等. 基于深度学习的机载点云屋顶平面提取算法[J]. 激光技术, 2024, 48(5): 628-636. LI J, LI Q Q, LI L, et al. An airborne point cloud roof plane extraction algorithm based on deep learning[J]. Laser Technology, 2024, 48(5): 628-636.
[9] 郑帅锋, 王山东, 张陈意, 等. 基于点云特征的城市道路标识线提取与分类[J]. 激光技术, 2024, 48(1): 27-33. ZHENG Sh F, WANG Sh D, ZHANG Ch Y, et al. Extraction and classification of urban road marking lines based on point cloud features[J]. Laser Technology, 2024, 48(1): 27-33(in Chinese).
[10] 陶志勇, 李衡, 豆淼森, 等. 融合多分辨率特征的点云分类与分割网络[J]. 光电工程, 2023, 50(10): 230166. TAO Zh Y, LI H, DOU M S, et al. Multi-resolution feature fusion for point cloud classification and segmentation network[J]. Opto-Electronic Engineering, 2023, 50(10): 230166(in Chinese).
[11] MATTEI E, CASTRODAD A. Point cloud denoising via moving RPCA[J]. Computer Graphics Forum, 2017, 36(8): 123-137. DOI: 10.1111/cgf.13068
[12] KIM J W, CHO J H. Delaunay triangulation-based spatial clustering technique for enhanced adjacent boundary detection and segmentation of LiDAR 3D point clouds[J]. Sensors, 2019, 19(18): 3926. DOI: 10.3390/s19183926
[13] 刘国栋, 刘佳, 刘浪. 一种基于机载LiDAR数据的山区道路提取方法[J]. 激光技术, 2022, 46(4): 466-473. DOI: 10.7510/jgjs.issn.1001-3806.2022.04.005 LIU G D, LIU J, LIU L. A method for extracting mountainous road based on airborne LiDAR data[J]. Laser Technology, 2022, 46(4): 466-473(in Chinese). DOI: 10.7510/jgjs.issn.1001-3806.2022.04.005
[14] HUANG J P, YAN Q X, YOU H T, et al. Particle swarm optimization-based noise filtering algorithm for photon cloud data in forest area[J]. Remote Sensing, 2019, 11(8): 980. DOI: 10.3390/rs11080980
[15] REN J Q, BAO K, ZHANG G H, et al. LANDMARC indoor positioning algorithm based on density-based spatial clustering of applications with noise-genetic algorithm-radial basis function neural network[J]. International Journal of Distributed Sensor Networks, 2020, 16(2): 1550147720907831. http://www.xueshufan.com/publication/3008106549
[16] LI Y Y, WANG J, LI B, et al. An adaptive filtering algorithm of multilevel resolution point cloud[J]. Survey Review, 2021, 53(379): 300-311. DOI: 10.1080/00396265.2020.1755163
[17] 魏硕, 赵楠翔, 李敏乐, 等. 结合改进DBSCAN和统计滤波的单光子去噪算法[J]. 激光技术, 2021, 45(5): 601-606. WEI Sh, ZHAO N X, LI M L, et al. A single photon denoising algorithm combining improved DBSCAN and statistical filtering[J]. Laser Technology, 2021, 45(5): 601-606(in Chinese).
[18] DUAN Y, YANG Ch Ch, LI H B. Low-complexity adaptive radius outlier removal filter based on PCA for lidar point cloud denoising[J]. Applied Optics, 2021, 60(20): E1-E7. DOI: 10.1364/AO.416341
[19] CHENG D Y, ZHAO D J, ZHANG J Ch, et al. PCA-based denoising algorithm for outdoor lidar point cloud data[J]. Sensors, 2021, 21(11): 3703. DOI: 10.3390/s21113703
[20] 李仁忠, 杨曼, 冉媛, 等. 基于方法库的点云去噪与精简算法[J]. 激光与光电子学进展, 2018, 55(1): 011008. LI R Zh, YANG M, RAN Y, et al. Point cloud denoising and simplification algorithm gate based on method library[J]. Laser & Optoelectronics Progress, 2018, 55(1): 011008(in Chinese).
[21] 郭昌龙, 夏振平, 李超超, 等. 结合改进半径滤波和局部平面拟合的点云去噪算法[J]. 激光与光电子学进展, 2024, 61(12): 1215003. GUO Ch L, XIA Zh P, LI Ch Ch, et al. A point cloud denoising algorithm combining improved radius filtering and local plane fitting[J]. Laser & Optoelectronics Progress, 2024, 61(12): 1215003 (in Chinese).
[22] MARC L, GREG T. The stanford 3D scanning repository[DB/OL]. (2023-04-25). https://graphics.stanford.edu/data/3Dscanrep/ .
[23] ÖZCAN A H, VNSALAN C. LiDAR data filtering and DTM generation using empirical mode decomposition[DB/OL]. (2017-04-29). https://github.com/himmetozcan/EMD_Lidar .
[24] 周圣涛. 基于多核的DSP的点云数据快速降噪技术研究[D]. 长春: 长春理工大学, 2020: 48-49. ZHOU Sh T. Research on fast noise reduction technology for point cloud data based on multi core DSP[D]. Changchun: Changchun University of Science and Technology, 2020: 48-49(in Chinese).

计量
- 文章访问数: 1
- HTML全文浏览量: 0
- PDF下载量: 1