
Power line extraction from airborne LiDAR data based on cloth simulation
-
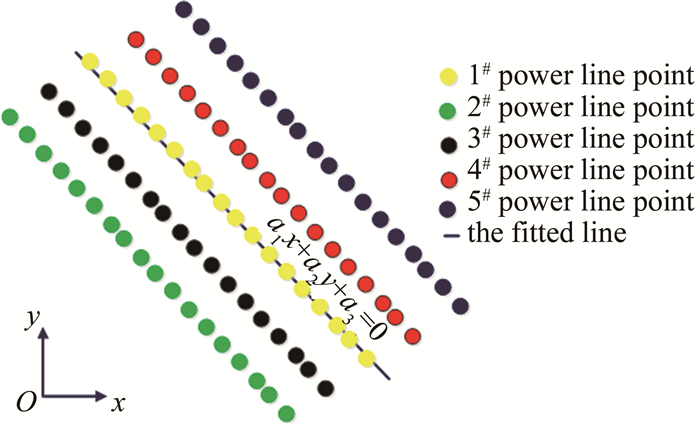
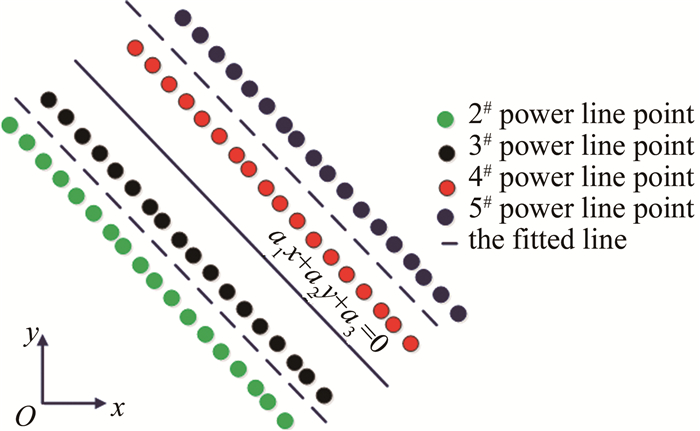
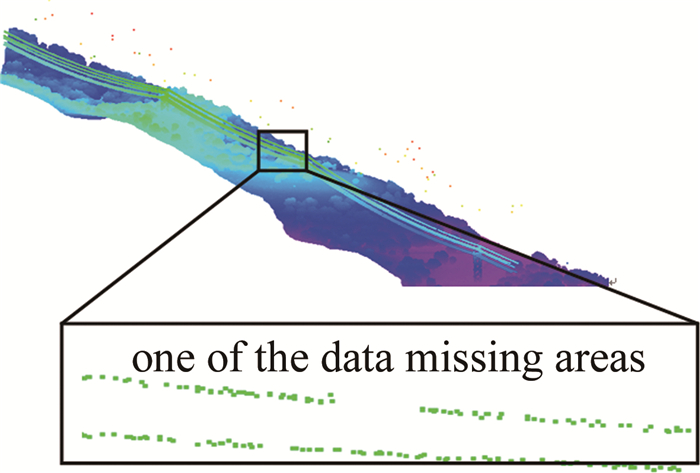
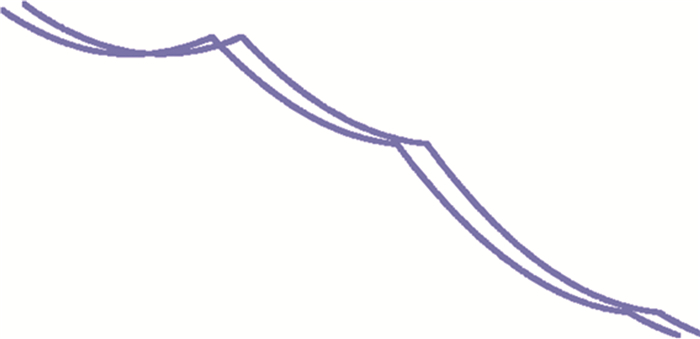
摘要: 为了实现长距离直线型机载激光雷达电力线提取,提出了一种基于布料模拟的长距离机载激光雷达电力线提取方法,在数据预处理的基础上,通过模拟布料下落过程,分析布料与对应机载雷达点云之间的作用,确定布料由重力下降后所停留的位置作为相近高度的电力线点云,然后在xOy平面内拟合直线,利用点到拟合直线的距离对电力线条数进行奇偶判断,通过点在直线两侧判断,实现单根电力线的提取。结果表明,所提出的方法对长距离电力线的提取精度达到98.9%,具有较高的自动化程度,且对局部点云缺失不敏感。该研究在电力线智能巡检及输电廊道空间结构自动分析领域具有良好的工程应用价值。Abstract: In order to realize the power line extraction of long distance linear airborne light detection and ranging(LiDAR), a power line extraction method of long-distance airborne LiDAR based on cloth simulation was proposed. On the basis of data preprocessing, the function between cloth and corresponding airborne LiDAR point cloud was analyzed by simulating the falling process of cloth. The position where cloth stayed after gravity falling was determined as the power line point cloud with similar height, and then the straight line was fitted in the xOy plane. The distances from points to the fitting line were used to judge the number of power lines whether odd or even. And the power line point clouds were divided by the judgment of points on both sides of the line to achieve the extraction of a single power line. The experimental results show that the accuracy of the proposed method is 98.9%, with high degree of automation and not sensitive to the lack of local point cloud, which has good engineering application value for intelligent powerline inspection and automatic analysis of transmission channel spatial structure.
-
Keywords:
- laser technique /
- powerline extraction /
- cloth simulation /
- long distance
-
引言
近些年, 单光子雷达技术逐渐发展成熟[1-3],作为一种新型激光3维雷达,光子计数激光雷达拥有自己显著的特点,如回波信号强度低、噪声大于激光回波、光电探测系统处于光子水平等[4]。不同于传统雷达探测回波时需要较多的光子形成弱光信号,单光子雷达使用单光子敏感探测器,仅需要检测到若干光子的返回信息便可得到目标位置信息,使得发射的光子更有效被利用,从而减少激光发射脉冲所需能量,因此单光子探测技术在采集数据方面具有较大优势,在当下以及未来,光子计数激光雷达在侦察、搜索等方面会发挥越来越重要的作用。
光子计数型激光雷达引入单光子探测器件和时间相关单光子计数(time-correlated single-photon counting,TCSPC)技术,使系统具有探测极微弱光信号的能力和皮秒量级的时间分辨率[5],即便在系统设计中采用超窄带滤波,但由于系统本身的灵敏度极高,探测目标背景仍会产生大量的噪声,因此,如何有效地去除噪声是发挥光子计数雷达探测能力的关键。目前常用的噪声去除和数据提取算法主要有残差比较算法、泊松滤波算法和距离相关检测算法等[6-8]。
HORAN等人[9]根据扫描数据中信号光子和噪声光子的分布特征,结合地形设定阈值,从而分离出目标点。HERZFELD等人[10]为模拟的ICESat-2数据分析而开发的计算算法,主要是借助特征向量计算出各项异性的密度中心,再根据地面和树冠设定密度阈值,达到识别地物的目的。LI等人[11]对初步去噪后的点云使用改进后的统计滤波方法,设定阈值进行去噪,但参量的设定比较依赖经验,对结果也有着较大的影响。LI等人[12]依靠计算点云密度进行去噪,首先进行图像分割进行粗去噪,再定义一种线性径向基函数进行精去噪,得到结果与设定的阈值比较,得出较好的结果。XU等人[13]在对单光子激光数据特点精确分析的基础上,提出一种基于地形相关和最小二乘曲线拟合的数据处理方法,获得较为精确的结果。上述算法要求的参量较多,且参量数值选取有较高的要求,作者在研究单光子数据空间分布特征的基础上,提出一种基于密度、参量自适应较强的去噪算法,并通过美国国家航空航天局(National Aeronautics and Space Administration,NASA)提供的多波束试验激光雷达(multiple altimeter beam experimental lidar, MABEL)实际飞行数据[14-15]进行验证,得到较好的结果。
1. 光子计数激光雷达系统原理
如图 1所示,光子计数激光雷达的工作原理是:脉冲激光器发射的脉冲经分光片后分成2束,一束充当计时脉冲照射到光电探测器,触发计时信号;其余部分照射到物体,经反射后产生回波被单光子探测器接收,并在计时电路中产生停止信号。TCSPC模块计算2次信号的时间差,得到本次脉冲的来回飞行时间。随着探测时间和探测次数的增加,得到扫描光子随时间分布的数据,传递给后续模块通过时间获取算法得到具体目标距离数据及成像。
由于系统本身的灵敏度很高,在探测过程中目标背景会产生大量的噪声,激光雷达的噪声大致分为3类:探测器噪声、放大器噪声、背景的辐射噪声[17]。随着制造工艺和致冷方式的进步,探测器噪声和放大器噪声得到有效抑制,为抑制背景噪声,除了在接收光学系统添加窄带滤波片外,还会采用距离门技术。
距离门技术是指给探测器添加一个时间区间,只有在这个时间区间内返回的回波光子才可以被探测到,在这个时间段外的回波光子不会被探测到。虽然如此,但大量的背景噪声仍会被引入到探测数据中,这就需要更近一步的去噪[18-19]。
2. 本文中的算法
2.1 算法相关概念
2.1.1 点密度xi
常规的点云密度定义Di是指在规定的半径eps内包含点云的数目,如下式所示:
$$ D_{i}=\operatorname{number}\left(\left|p_{i}-p_{j}\right|<\text { eps }\right) $$ (1) 式中, pi是中心点坐标,pj是临近点坐标,i, j=1, 2, 3…; eps是指基于密度的空间聚类噪声应用(density-based spatial clustering of applications with noise,DBSCAN)算法中的半径参量。
与常规的点云密度定义相反,本文中规定点密度xi表示单个点云的密度,如(2)式所示。由k维树可以得到k个临近点到中心点的距离数组{x1, x2, …, xk},由于k值是输入参量,因此点密度xi表示包含k个点云的最小距离。
$$ x_{i}=\max \left\{x_{1}, x_{2}, \cdots, x_{k}\right\} $$ (2) 2.1.2 密度阈值xm
分割阈值xm根据点密度xi求出,其大小为整体点密度的均值,计算下式所:
$$ x_{\mathrm{m}}=\frac{x_{1}+x_{2}+\cdots+x_{n}}{n} $$ (3) 由光子计数激光雷达的特性以及对实际数据集的研究可知,噪声点云的数量远远大于信号点云,因此分割阈值的范围在0.8xm~xm之间均可以满足实验要求,经多次实验可知,分割阈值的取值为0.9xm时结果最佳。
2.1.3 改进的DBSCAN算法
DBSCAN算法根据人为输入参量eps以及minpts(DBSCAN算法中的固定变量符号,表示eps距离内包含的个数) 衡量点云密度,遍历所有点云,将点云划分成一个个密度不等的簇。由于输入参量有较大的主观性,如果和数据集密度特征不匹配容易造成过分割或欠分割。
为了弥补原DBSCAN算法的缺点,本文中将点密度xi用于衡量单个点云密度,由于点密度xi和密度阈值xm均由数据集本身密度特征自动计算,因此在核心点“生长”为簇的过程中,避免了人工带来的误差。
改进后的聚类算法由于具有密度参量自适应的特性,可以对绝大多数的点云集进行合理分割。
2.2 算法详细步骤
本文中去噪方法可以分为2步:粗去噪和精去噪。首先对数据进行粗去噪,去除大部分明显的噪声点,可以极大地简化后续算法的计算量;然后根据剩余点云的密度特征和空间分布特征,执行精去噪,获得目标点云数据。算法流程如图 2所示。
2.2.1 粗去噪
(1) 坐标转换。实际实验数据是大地坐标系(L, M, H),即由经度L、维度M和高程H组成,利用坐标转换[20-21],将大地坐标系数据转化成空间直角坐标系(x, y, z)数据;(2)建立空间拓扑关系。对直角坐标系下的点云数据通过k维树建立空间拓扑关系,由近邻索引计算点云之间密度;(3)设定阈值去除明显噪声。选取合适的阈值进行点云分割(本文中选取0.9倍密度均值作为阈值),滤除明显的离散噪声点。
2.2.2 精去噪
(1) 计算剩余数据的点密度xi。对剩下的数据建立k维树,由最近邻索引得到距离数组{x1, x2, …, xk},求出点密度xi;(2)根据点密度进行点云分簇。随机选取一个点,当该点点密度满足阈值xm时进行区域增长,逐步遍历其周围的点,将满足条件的点归为一簇,重复此过程,直至所有点云均被处理;(3)去除团状噪声簇。数据分簇后,检查每个点云簇包含的点云数量,对于点云数小于一定值的点云簇视为噪声簇去除,具体分析如下:由于本文中选取的研究对象是山脉,在噪声影响的下,目标也可能被分成几段,所以经过试验选取阈值为0.5T,既可以达到去噪目的也尽可能保留信号点,其中,阈值T=数据集点云数÷聚类后簇数,查看每个簇点云数目,如果小于0.5T,则作为密集噪声簇去除; (4)去除目标很近的离散噪声。遍历点云得到临近的k个点, 并求出距离均值构成1维数组D,然后计算数组D的均值di和标准差σ,设定阈值滤除离散点。
定义di为点pi(xi, yi, zi)到其k个临近点pij(xij, yij, zij)的平均距离,di为di的均值,σ为di的标准差,j=1, 2, …, k。
$$ \begin{array}{l} \;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;{d_i} = \\ \frac{{\sum\limits_{j = 1}^k {\sqrt {{{\left( {{x_{ij}} - {x_i}} \right)}^2} + {{\left( {{y_{ij}} - {y_i}} \right)}^2} + {{\left( {{z_{ij}} - {z_i}} \right)}^2}} } }}{k} \end{array} $$ (4) $$ {{\bar d}_i} = \frac{{\sum\limits_{i = 1}^n {{d_i}} }}{n} $$ (5) $$ \sigma = \sqrt {\frac{1}{n}\sum\limits_{i = 1}^n {{{\left( {{d_i} - {{\bar d}_i}} \right)}^2}} } $$ (6) 3. 参量自适应
本文中的算法,需要设定的参量只有k,k表示选取临近点的数目,k值大小的意义在于点密度的衡量标准。k值很小, 话点密度由最近的较少点决定,增加了特殊值出现的情况,如某个信号点恰好周围最近的几个点较稀疏,或者某个噪声点最近的几个点距离很近等;k值很大, 会使信号点与噪声点的密度分割线较为模糊,虽然可以额外保留分布特殊的信号点,但也容易保留较多的噪声点。
本文中的数据来源是美国NASA提供的MABEL实际飞行数据,目标区域是位于美国加州Sierras-Forest地区,采用2010年12月飞行试验的532nm波段第50通道的观测数据进行实验。坐标转化后的数据总共有169511个点,其中噪声数据点有123280个,目标点云有46231个。
本文中选取不同k值代入算法进行运算,去噪后的点云数据如表 1所示。
Table 1. Point cloud data after denoisingk 8 12 16 25 38 50 70 100 noise point 7309 5592 5309 7205 8064 9411 9859 11044 signal point 40008 40575 40867 42741 42231 42674 42283 42822 此外还借助2个参考标准衡量k值对去噪结果的影响。一个是滤波精度N,其公式如下:
$$ N=N_{\mathrm{c}} / N_{\mathrm{t}} $$ (7) 式中,Nc表示正确区分的信号点数目,Nt表示信号点总数。滤波精度N主要描述了点云正确识别率,但没有考虑噪声的影响。基于此,本文中还采用交并比U来描述信号点与噪声点的关系,公式如下:
$$ U=(A \cap B) /(A \cup B) $$ (8) 式中, A表示实际信号点云数据集,B表示去噪后点云数据集,(A∩B)表示的是去噪后保留的点云数,(A∪B)表示的是实际信号点云数据和去噪后保留的噪声数据之和。一般来说,在计算机检测任务中,U>0.5的结果就是可以接受的,U越大,则点云图的质量也就越好。具体数据如表 2所示。
Table 2. The relationship between k value and N, Uk 8 12 16 25 38 50 70 100 N/% 86.6 87.8 88.4 92.5 91.2 92.3 91.5 92.6 U/% 74.7 78.3 79.3 80.0 77.8 76.7 75.4 74.8 从表 1可知,k值和去噪后的信号点和噪声点数目均呈正相关,这和上面对k值的分析相符。由表 2可知,随着k值的增长,N的增长率逐渐接近于0,而U却逐渐降低,表明噪声点的增长率大于信号点的增长率,继续增大k值得不偿失。总体上来看,U保持在75%~80%左右,表明k值的适当选取对点云图质量影响不是很大,符合本文中算法参量自适应的要求。
4. 实验结果与讨论
4.1 实验结果
由第3节中分析可知,本文中的算法参量具有参量自适应强的特点,k值对最终结果的影响并不是很大,因此令k=23,首先将数据由大地坐标系转换到空间直角坐标系,并将坐标系原点平移到数据最小处,然后应用本文中的算法进行去噪。去噪后,剩余噪声点为6290个,保留的目标点为41733个,滤波精度N=90.27%,交并比U=79.5%。
图 3是坐标转换且进行平移后的原始数据。其中黑色是噪声,细线是山脉。从图中可以看出, 噪声点的数量远大于信号点数量。图 4是粗去噪的结果。从图中可以看出,大量的噪声点已经被去掉,可以近似看出山脉的轮廓。图 5和图 6是精去噪的结果图。其中图 5是利用改进DBSCAN算法进行二次去噪后的结果,图中极大部分明显的团状噪声点已经被去除。图 6是应用统计滤波处理后的最终去噪结果,目标主体附近的离散噪声点云也有了明显的去除。图 7是部分放大后的场景图。从中可以看出,目标细节有了更多的保留,山坡上的树木也可以分辨。
4.2 算法对比
半径滤波算法也是常用的滤波算法,其原理是假定数据集中每一个点在给定的半径r内至少存在k个点,符合假定条件的作为信号点保存下来,不符合条件的作为噪声点除去,其中半径r以及数值k由人工指定。为了优化结果,事先选取数值k=30,半径r在密度阈值附近多个范围内取值,观察不同参量下的半径滤波结果,并与本文中去噪算法结果进行比较。
在k=30时,计算出的r=21。由于r值越大,保留的噪声点就越多,因此对于参量r主要选取小于21的值。令r为3, 6, 9, 12, 15, 18, 21和24,去噪后数据如表 3所示,去噪效果较好的结果如图 8所示。
Table 3. Radius filtering datar 3 6 9 12 15 18 21 24 signal point 9542 32291 40673 44049 45481 45990 46165 46198 noise point 29 1522 5652 10425 19011 31771 44969 58410 U/% 20.62 67.62 78.39 77.74 69.71 58.96 50.61 44.14 ![Figure 8. Filtering results under different r values]() Figure 8. Filtering results under different r valuesa—filtering results under r=9 b—filtering results under r=12
Figure 8. Filtering results under different r valuesa—filtering results under r=9 b—filtering results under r=12结合图 8和表 3可以发现,在不同的参量下,半径滤波的结果起伏非常大。半径滤波的准确性建立在较为苛刻的先验知识上,需要人为地设定参量,不具备普遍适用性,最好的参量情况下,其结果达到78.39%。
参考文献[12]中提出的去噪算法也采用滤波精度作为衡量算法的指标,该文献中滤波精度分别达到90.26%以及96.11%。本文中算法在输入参量k>20后,其滤波精度均达到90%左右,点云去噪结果较好,且可选参量范围较广,突出本文中算法参量自适应能力强的特点。
5. 结论
DBSCAN算法分割结果的好坏取决于参量设定,需要eps, minpts和数据集密度特征相匹配,因此,DBSCAN算法在处理不同数据集时需要多次实验来确定最佳参量,而本文中改进后的DBSCAN算法仅需要设定临近点数目,相应的距离参量可以由k维树根据数据集密度特征自动得出,因此改进的DBSCAN算法在适应性上大大提高。其次,本文中对改进后DBSCAN算法分割后的结果进行处理,去除了目标附近大部分团状噪声点云,再根据剩余点云特征,设定统计滤波法的阈值对点云进行最终处理,得到结果。
半径滤波算法是应用极为广泛的密度滤波算法,本文中利用半径滤波算法处理数据集,将得到结果与本文中算法相对比,可以看出, 本文中算法几乎不需要先验知识,在参量自适应性上远远优于半径滤波算法。此外, 本文中的去噪算法在参量适中的情况下, U普遍在75%~80%(半径滤波算法的U在20%~79%), 滤波精度在85%~93%,去噪结果也好于半径滤波算法。两种算法对比,更加突出本文中算法的优越性。
但本文中的算法也存在一定的缺点,对于距离目标较近且密度极大的团状点云无法有效的去除,只能尽量减少其大小与数量,此外,如果数据集很大的情况下,k维树的搜索速度也逐渐下降。由图 5粗去噪结果图可以清晰地看出扫描线结构,在粗去噪的基础上,结合扫描线间距以及同一扫描线上点间距进行精确去噪,这是作者下一步进行改进的方向。
-
Table 1 Accuracy analysis of the proposed method
power line No. extraction results of theproposed method manually extraction results extraction rate/% 1# 2608 2621 99.5 2# 2601 2614 99.5 3# 5032 5042 99.8 4# 5827 5834 99.9 5# 5207 5212 99.9 total 21095 21323 98.9  下载: 导出CSV
下载: 导出CSV
-
[1] CHEN C, YANG B S, SONG S, et al. Automatic clearance anomaly detection for transmission line corridors utilizing UAV-borne LiDAR data[J]. Remote Sensing, 2018, 10(4): 613-633. DOI: 10.3390/rs10040613
[2] WU H, LIU H Y, DING G F, et al. Automatic extraction of power lines from laser point clouds in complex environments[J]. Laser Technology, 2020, 44(4): 509-514(in Chinese).
[3] SHI L, GUO T, PENG Ch, et al. Segmentation of laser point cloud and safety detection of power lines[J]. Laser Technology, 2019, 43(3): 341-346(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTotal-JGJS201903010.htm
[4] WANG Y J, CHEN Q, LIU L, et al. A hierarchical unsupervised method for power line classification from airborne LiDAR data[J]. International Journal of Digital Earth, 2019, 12(12): 1406-1422. DOI: 10.1080/17538947.2018.1503740
[5] SHI H Y, GUO T, WANG D, et al. Power line suspension point location method based on laser point cloud[J]. Laser Technology, 2020, 44(3): 364-370(in Chinese).
[6] PENG X Y, SONG S, QIAN J J, et al. Research on automatic positioning algorithm of power transmission towers based on UAV LiDAR[J]. Power System Technology, 2017, 41(11): 3670-3677(in Chin-ese). http://en.cnki.com.cn/Article_en/CJFDTotal-DWJS201711040.htm
[7] CHEN Ch, PENG X Y, SONG Sh, et al. Safety distance diagnosis of large scale transmission line corridor inspection based on LiDAR point cloud collected with UAV[J]. Power System Technology, 2017, 41(8): 2723-2730(in Chinese). http://www.dwjs.com.cn/EN/Y2017/V41/I8/2723
[8] YU J, MU Ch, FENG Y M, et al. Power lines extraction techniques from airborne LiDAR data[J]. Geomatics and Information Science of Wuhan University, 2011, 36(11): 1275-1279 (in Chinese). http://en.cnki.com.cn/Article_en/CJFDTOTAL-WHCH201111006.htm
[9] CHEN C, MAI X M, SONG S, et al. Automatic power lines extraction method from airborne LiDAR point cloud[J]. Geomatics and Information Science of Wuhan University, 2015, 40(12): 1600-1605(in Chinese).
[10] MANOHAR Y, CHARUDATTA G. Extraction of power lines using mobile LiDAR data of roadway environment[J]. Remote Sensing Applications: Society and Environment, 2017, 8: 258-265. DOI: 10.1016/j.rsase.2017.10.007
[11] ZHAO L, WANG X P, DAI D D, et al. Automatic extraction algorithm of power line in complex background[J]. High Voltage Engineering, 2019, 45(1): 218-227(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTotal-GDYJ201901029.htm
[12] WU J J, CHEN L, LI L, et al. Power line extraction and reconstruction from airborne LiDAR point cloud[J]. Laser Technology, 2019, 43(4): 500-505(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTotal-JGJS201904012.htm
[13] ZHANG C X, ZHAO L, WANG X P, et al. Fast extraction algorithm of power lines in complex ground objects[J]. Journal of Wuhan University(Engineering Edition), 2018, 51(8) : 732-739(in Chin-ese). http://en.cnki.com.cn/Article_en/CJFDTOTAL-WSDD201808011.htm
[14] WANG J, XIA Sh B, WANG H P, et al. Study on reconstruction of bundled conductors from helicopter-borne LiDAR data[J]. Remote Sensing Technology and Application, 2015, 30(6): 1189-1194(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTOTAL-YGJS201506020.htm
[15] LIN X G, ZHANG J X. 3D power line reconstruction from airborne LiDAR point cloud of overhead electric power transmission corridors[J]. Acta Geodatrica et Cartographica Sinica, 2016, 45(3): 347-353 (in Chinese). http://d.wanfangdata.com.cn/Periodical/chxb201603016
[16] DUAN M Y. 3D power line reconstruction from airborne LiDAR point cloud[J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(12): 1495(in Chinese). http://d.wanfangdata.com.cn/Periodical/chxb201603016
[17] LAI X D, DAI D C, ZHENG M, et al. Power line 3D reconstruction form LiDAR point cloud data[J]. Journal of Remote Sensing, 2014, 18(6): 1223-1229(in Chinese). http://en.cnki.com.cn/Article_en/CJFDTotal-YGXB201406010.htm
[18] McLAUGHLIN R A. Extracting transmission lines from airborne LiDAR data[J]. IEEE Geoscience & Remote Sensing Letters, 2006, 3(2): 222-226. http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=1621083
[19] SOHN G, JWA Y, KIM H B. Automatic powerline scene classification and reconstruction using airborne LiDAR data[C]// ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences 2012. Melbourne, Australia: International Society for Photogrammetry and Remote Sensing, 2012: 167-172.
[20] WEIL J. The synthesis of cloth objects[J]. ACM SIGGRAPH Computer Graphics, 1986, 20(4): 49-54. DOI: 10.1145/15886.15891
[21] ZHANG W M, QI J B, WAN P, et al. An easy-to-use airborne LiDAR data filtering method based on cloth simulation[J]. Remote Sensing, 2016, 8(6): 501-519. DOI: 10.3390/rs8060501
[22] WANG G, WANG Q, LIU Sh T, et al. Method of building extraction from UAV oblique photography point cloud based on cloth simulation[J]. Bulletin of Surveying and Mapping, 2020(10): 97-100.
-
期刊类型引用(7)
1. 王建宇. 基于自适应邻域特征估算与优选的电力线提取. 资源导刊. 2025(04): 33-35 .  百度学术
百度学术
2. 杨文杰,裴少通,刘云鹏,胡晨龙,杨瑞,张行远. 基于改进Point Net++的输电线路关键部位点云语义分割研究. 高电压技术. 2024(05): 1943-1953 . 百度学术
3. 柳翠,陈国洲,褚宁,张宁. 从城市道路点云数据中快速提取架空线路及其参数. 北京测绘. 2024(07): 1004-1009 . 百度学术
4. 范亚洲,李国强. 输电线路走廊地物到导线危险距离定位方法. 沈阳工业大学学报. 2024(06): 748-753 . 百度学术
5. 宋向荣. 基于机载LiDAR点云的电力线提取与三维重建. 北京测绘. 2023(02): 254-259 . 百度学术
6. 曹中森. 基于机载LiDAR点云数据的电力线自动提取方法与研究. 经纬天地. 2023(04): 43-46+81 . 百度学术
7. 储栋,王磊,李靖宇,李忠,黄金中,李世保. 基于WPA-CSF的地面点云滤波方法研究. 地球物理学进展. 2023(05): 1919-1930 . 百度学术
其他类型引用(3)








计量
- 文章访问数: 9
- HTML全文浏览量: 2
- PDF下载量: 6
- 被引次数: 10