 Map
Map



HTML
-
在公路、桥梁及隧道等交通基础设施的建设中, 混凝土发挥着重要作用。同时在混凝土结构表面的维护中, 裂缝是最常见病害之一。对裂缝的早期发现与检测具有现实意义[1-2]。
现阶段混凝土表面裂缝检测多采用视觉检测法和一些较为原始的无损检测方法[3-5],如超声脉冲法、脉冲回波法、雷达检测法、红外热谱法、声发射法。这些方法依赖工人的熟练程度,不仅大量耗费人力物力,在精度和效率方面存在很大劣势,而且无法发现微裂缝。根据国家对混凝土允许裂缝宽度限值的规定,微裂缝定义为宽度小于0.2mm的裂缝,是裂缝最根源的形态。
激光超声是一种非接触式的无损检测方法,具有非接触、宽带、高灵敏度、高的空间分辨率等优点,广泛地被用来检测表面和埋藏的缺陷[6-8]。同时,激光超声技术作为一种宽带检测技术,可以通过精确测定超声位移幅度,检测到毫米量级的缺陷,甚至是微米量级的缺陷[9]。通过高速扫查的检测手段,结合图像处理方法以及信号分类方法,可以实现超声波的可视化,突显缺陷信息[10-14]。
本文中将有限元模拟与实验相结合,对激光扫描混凝土裂缝的超声检测技术进行了探究。在实验室条件下对混凝土试样尝试了2维成像方法;然后在有限元模拟中引入瑞利阻尼模拟了混凝土中的高频衰减特性,同时对存在缺陷时的信号特征进行了分析。
-
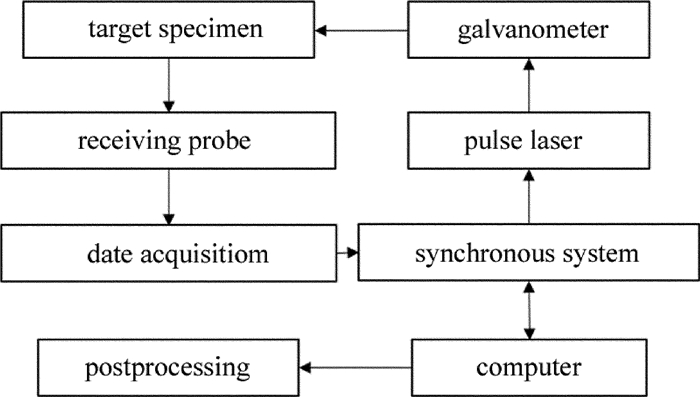
本实验中采用实验室自主研发的激光超声场检测仪,包含激光激发和高速信号采集两个模块,超声波由输出波长为1064nm和脉宽为10ns的Nd:YAG激光器激发,激光脉冲通过焦距为100mm的扫描振镜聚焦镜头实现在试样表面的聚焦与扫点,超声波信号由压电传感器接收,再通过检测仪中的高速信号采集模块采样并存入计算机,采样频率为100MHz。检测流程如图 1所示。
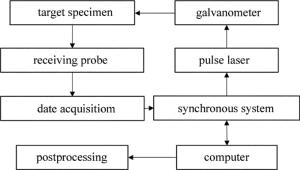
Figure 1. Schematic diagram of working procedure
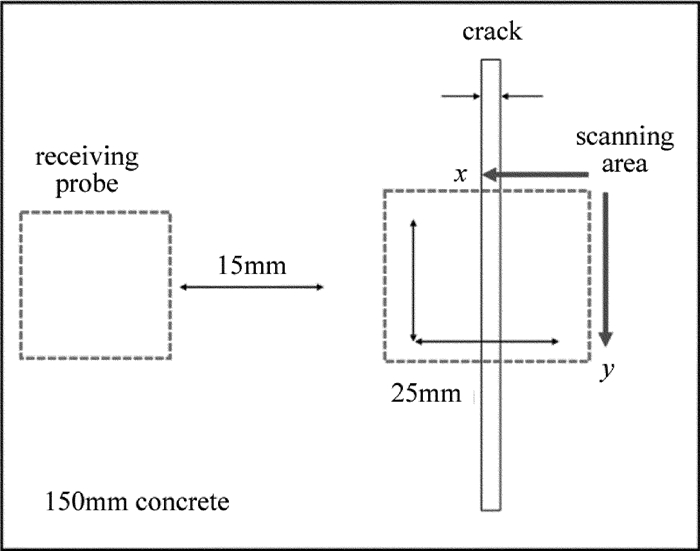
混凝土试件按照C50标准制作,尺寸大小为150mm×150mm×150mm,用特定尺寸的铁片在表面预制宽度为0.2mm的裂缝,裂缝深度10mm。通过激光扫描控制程序调节打点范围和间隔。如图 2所示,激光沿y轴共计打点50排,每排沿x轴扫描打点50次。打点间隔标定为0.508mm±0.005mm。
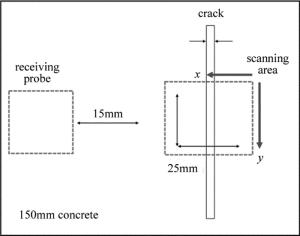
Figure 2. Specimen size and scanning schematic diagram
关于接收探头的选择,金属常用的探头工作频率通常在1MHz以上,不适合混凝土材料的检测,且普通的低频直探头半径过大,对试样尺寸要求高,因此从信号特征和实验条件考虑,尝试使用最高工作频率为500kHz的表面波探头在距离裂缝左边界17.5mm处接收信号。
yi一定时,可得到一组不同xi坐标下的信号波形及对应的传播时间ti。取yi=12.5mm时,不同xi坐标下的时域信号作图。当xi坐标大于12.5mm(见图 3中长虚线以上),此时激光源处于缺陷与接收探头之间时,激发方式为近场激发,信号具有明显的双极性特征。由信号的时间差和传播距离,可以求得该信号传播速率为2.11km/s,与理论表面波波速2.22km/s的误差率为4.96%。
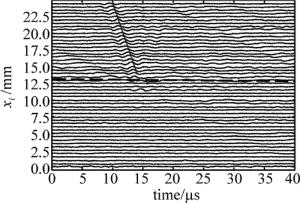
Figure 3. Time domain signals with different xi coordinates at yi=12.5mm
取时域信号的峰峰值作图 4。可以观察到在xi坐标从12.5mm~13.5mm时,峰峰值由0.461V增加到1.169V,当xi坐标小于12.5mm时,信号特征以背景噪声为主,整体能量较小;当xi=13.5mm时,信号呈双极性特征,与xi坐标小于12.5mm的信号相比信号峰峰值发生了突增。
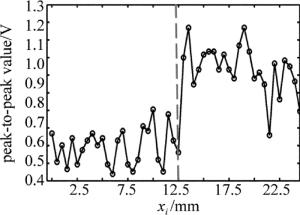
Figure 4. Peak-to-peak value of time domain signals with different xi coordinates at yi=12.5mm
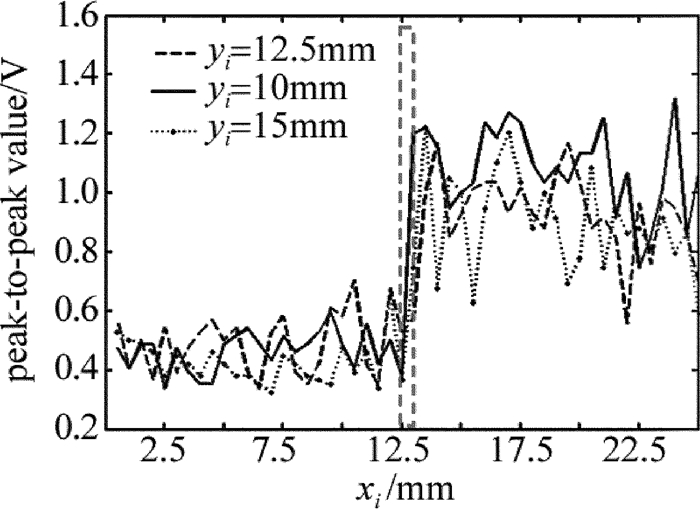
当yi为10mm, 12.5mm, 15mm时,不同xi坐标的时域信号峰峰值如图 5所示。由图可知,信号峰峰值在xi=13.5mm~14mm范围内取得最大值,且峰峰值在xi=12.5mm后突增,该位置为裂缝的边缘。此时,激光处于裂缝与接收点之间,激光光源近场激发声场。
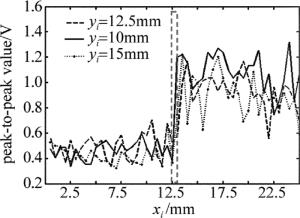
Figure 5. Peak-to-peak values of time domain signals with different xi coordinates at yi=10mm and 12.5mm, 15m
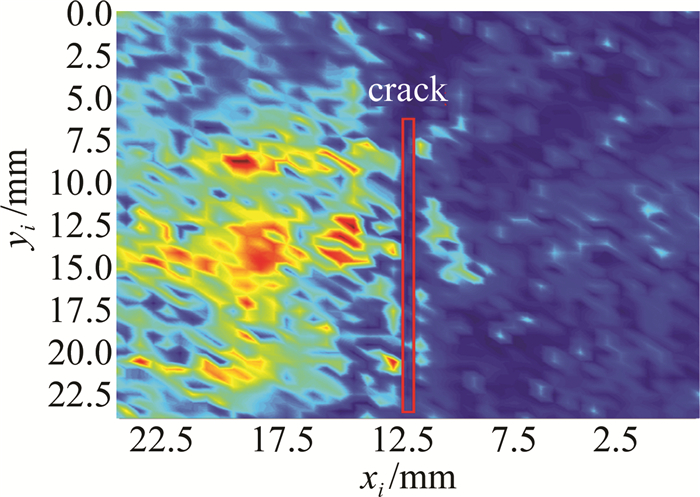
对打点矩阵得到的信号做滤波等预处理后,可以得到打点矩阵上每一点信号的峰峰值,将峰峰值大小由色阶表示,可以在打点范围上形成由信号峰峰值表征的2维图像,如图 6所示。图中xi坐标为12.5mm与14mm之间存在明显的能量反差,与实际裂缝边缘位置一致。这与参考文献中提到的能量分布技术得到的结论一致[15]。当xi坐标继续增大,信号以直达表面波信号为主导,信号能量继续增加,如果进一步调整阈值,可以反映出更真实、明显的裂缝形貌。
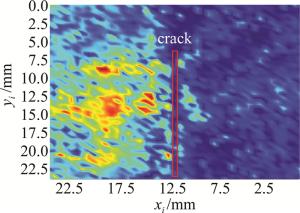
Figure 6. Peak-to-peak value imaging
2维图像中信号表征的裂缝并不占满整个打点区域,这可能是由于表面波接收探头在接收角度上对上下区域的信号不敏感造成的,另外由于接收探头的接收特性,可以发现与远离探头中心线时接收到的信号能量相比,在探头中心所对应的中线yi=12.5mm±2mm范围内,信号能量更大。


-
为了进一步研究激光近场激发混凝土信号特征,采用有限元法对激光在材料表面激发超声波进行研究。考虑到混凝土材料的复杂性以及有限元模拟的效率,现将混凝土当作各向同性均匀材料进行研究。
声表面波的激光激发机理主要有两种,在目前的理论中,主要是针对热弹模型,理论相对完备,融蚀模型的完备解必须建立在融蚀模型的基础之上。在实际情况中,两种机制往往同时起作用。本文中有限元采用热弹模型。在线弹性范围内,材料的热弹场是由热弹耦合方程所控制的,具体方程如下:
式中,T和T0分别是材料的实际温度和环境温度,u(x, t)是材料内部不同时刻的位移向量,κ是热传导系数,cV是材料的比定容热容,β是热弹耦合系数, 且β=(3λ+2μ)α,α是线性热膨胀系数,q表示单位体积在单位时间内吸收的热量,ρ表示材料密度,λ和μ表示材料的拉梅常数。▽为向量微分算子,其形式化定义为$▽ = \frac{{\rm{d}}}{{{\rm{d}}\mathit{\boldsymbol{r}}}}$,在n维空间中,分母dr为含有n个分量的向量。$\mathit{\boldsymbol{\dot u}}, \mathit{\boldsymbol{\ddot u}}$分别为u(x, t)对时间变量t的1阶求导与2阶求导。当激光辐照表面产生超声波时,${T_0}\beta ▽ \cdot \mathit{\boldsymbol{\dot u}}$超声场对温度场的影响项,而β▽T则是温度场对超声场的影响项。本文中采用耦合求解方式,考虑超声场和温度场之间的相互影响。
-
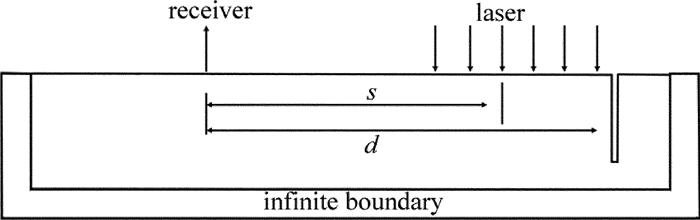
采用ABAQUS有限元软件中的Explicit显式求解器求解瞬态的波传播问题。图 7为2维半无限平面中激光激发超声波的有限元模型,其中平面左、右、下侧均为无限边界。在模型中采用规则的矩形凹痕来代替实际材料中的表面缺陷,为与实验进行对照,另外根据微裂缝定义和国家对混凝土裂缝宽度的允许限值,将凹痕的宽度取为0.2mm。为叙述方便,d表示接收点至缺陷的距离,s表示接收点至激光源的距离。激光源处于传感器和缺陷之间。
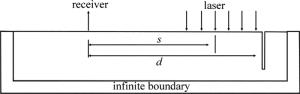
Figure 7. Schematic diagram of finite element model
有限元模型中采用4节点平面矩形单元。MOSER等人推荐每个波长范围内应包含20个单元,这样才能有效捕捉波动效应。在本次研究中,网格大小取为10μm。考虑到计算的稳定性,时间步长取为0.2ns。根据实验中使用的激光检测仪实际参量,有限元脉冲激光的上升时间为5ns,光斑半径取为100μm。计算中,混凝土材料的热物理参量见表 1。
Young modulus/
GPaPoisson’s ratio density/(kg·m-3) thermal expansion
coefficient/(10-6K-1)thermal conductivity/
(W·m-1·K-1)specific heat capacity/
(J·kg-1·K-1)4.5 0.2 2420 1 1.8 800 Table 1. Material parameters of concrete for the finite element model
-
阻尼比是用以描述材料或结构在振动过程中某种能量耗散方式的术语,是材料或结构的动力特性参量之一,阻尼比的大小对动态响应有非常明显的影响。
一般情况下,阻尼矩阵是依赖于频率的,但在实际分析中,要精确地确定阻尼矩阵是相当困难的。实际计算过程中通常采用瑞利(Rayleigh)阻尼。瑞利阻尼假设结构的阻尼矩阵C是质量矩阵[M]和刚度矩阵[K]的组合,即:
式中, αR和βR是两个比例系数,分别具有s-1和s的量纲,不依赖于频率。其中第1项是针对低频的粘性阻尼,计算时可以取0;第2项是针对高频的阻尼。瑞利阻尼系数αR和βR与阻尼比ξn之间的关系为:
式中,ωn为材料的固有频率。
在ABAQUS材料属性中试取瑞利阻尼系数αR=0s-1,βR=1×10-8s。模型中凹痕宽度为0.2mm,深度为3mm,接收点至缺陷的距离d=12mm,接收点至激光源的距离s=11mm。有限元脉冲激光的上升时间为5ns,光斑半径取为100μm。其余模型参量如上面所述。
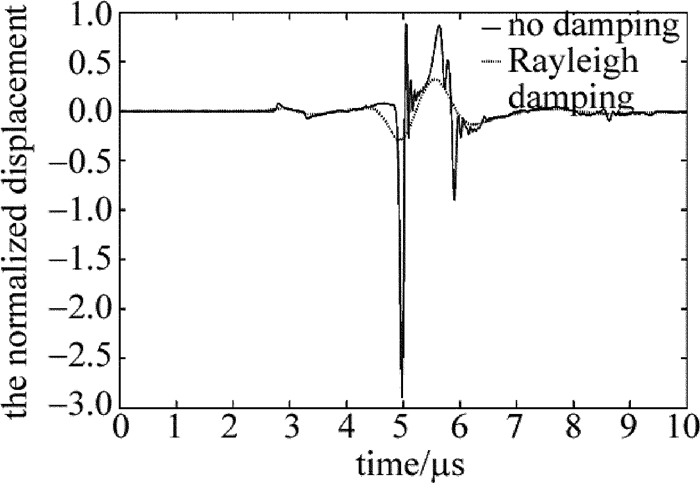
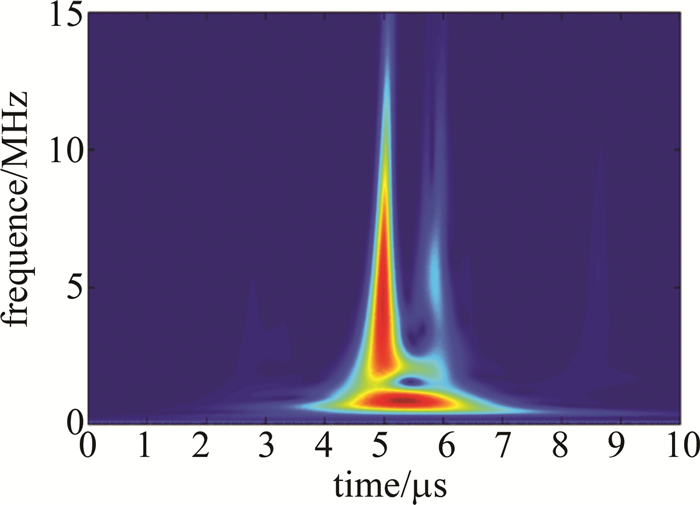
图 8~图 10显示了添加瑞利阻尼与无阻尼时有限元结果,同时该信号将在下面详细展开。由图 8可知,位移信号中的高频信号在添加瑞利阻尼的条件下得到有效抑制,且信号峰值减小。另外,由小波变换得到的时域信息中可知,存在瑞利阻尼条件下,信号频率范围在0.1MHz~2MHz,中心频率为0.65MHz,由(4)式可反求材料的阻尼系数为1%。普通混凝土的阻尼比在0.9%~2.0%之间。有限元计算与文献中的结论一致[16],说明瑞利阻尼试取合适。
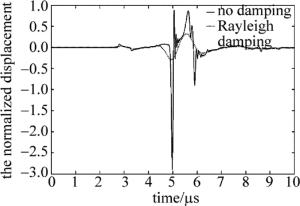
Figure 8. Comparison between damping and undamped signal when d=12mm, s=11mm
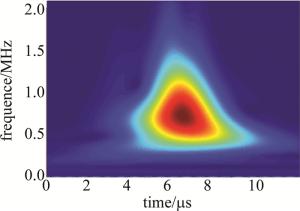
Figure 9. Time frequency graph of damping signal with d=12mm, s=11mm
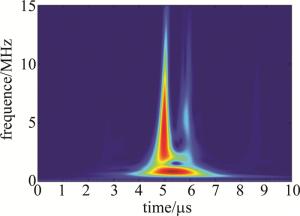
Figure 10. Time-frequency graph of undamped signal with d=12mm, s=11mm
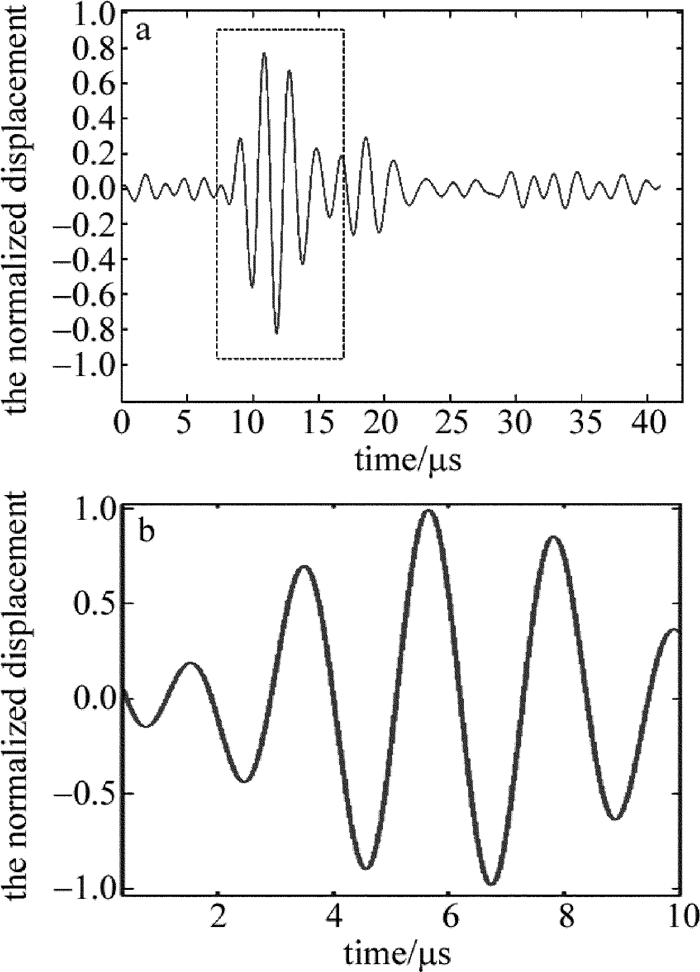
为了验证有限元模拟的正确性,根据实验接收条件,对有限元信号进行低通滤波,截止频率为500kHz。信号对比如图 11所示。图 11a为实验中扫描激光源与接收探头在裂缝同侧时的信号,矩形窗内信号为激光近场激发时接收到的首波信号,时长10μs,与有限元信号时长一致;图 11b展示了图 9中数值模拟信号经过低通滤波后的时域波形,观察可知,数值模拟信号波形特征与实验一致,验证了有限元模拟的正确性。

Figure 11. Comparisons between numerical and experimental signals
-
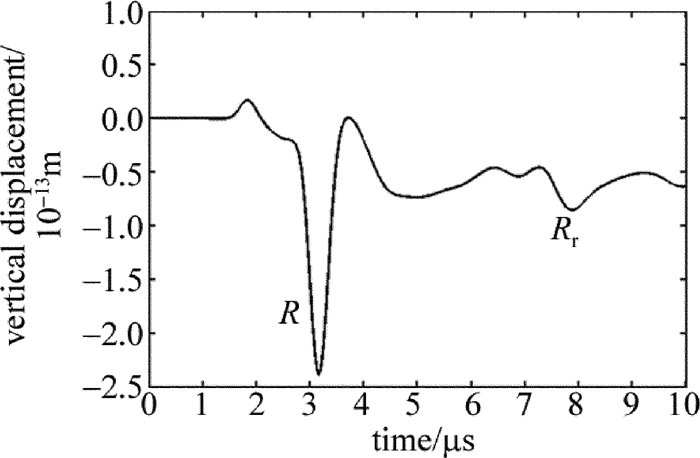
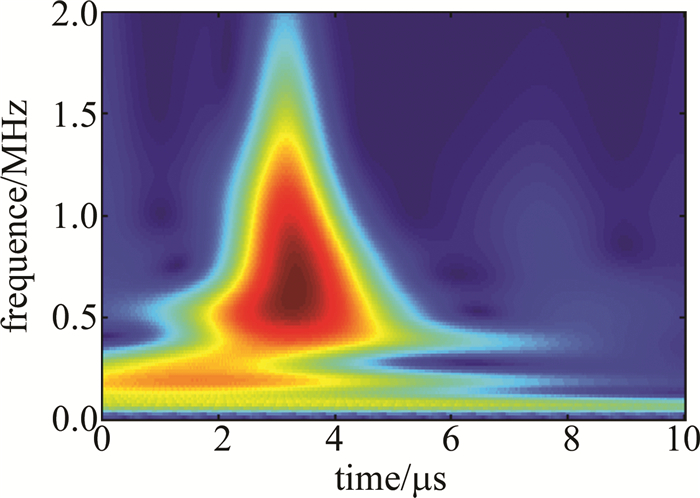
在有限元模型中添加瑞利阻尼,利用有限元模拟移动激光源扫描混凝土进行超声检测的过程。激发激光源从s=7mm位置开始向缺陷位置移动。当d=12mm,s=7mm时的声信号如图 12所示。图中,R表示直达表面波,Rr表示反射回波。R与Rr峰之间的振荡由缺陷产生。对表面波频率进行分析,由小波变化得到信号的时频图如图 13所示。由图 13可知,表面波中心频率为626kHz,中心频率信号能量最大的时间在3.308μs,与时域图上直达表面波信号R峰值出现时间一致。可以观察到,Rr信号由于传播过程中的高频衰减,中心频率减小为427kHz,且峰值只有直达波信号R的35.79%。由此可见,能量衰减和高频衰减特性是混凝土材料中超声信号与金属材料的主要区别。
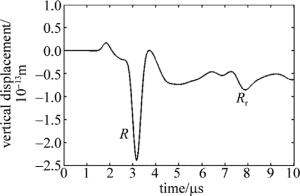
Figure 12. Acoustic signal at d=12mm and s=7mm
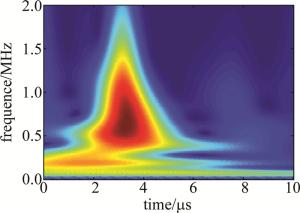
Figure 13. Time frequency diagram of acoustic signal at d=12mm and s=7mm
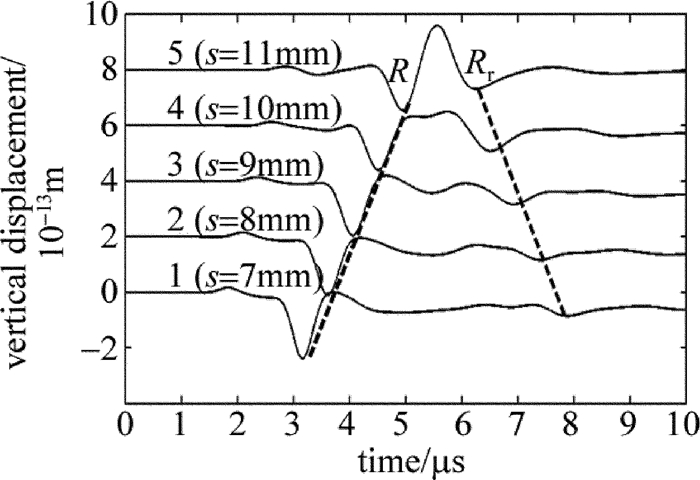
设置近场范围内激光作用在不同的激发位置模拟扫描过程,分别建立平面应变有限元模型。模型中凹痕宽度0.2mm,深度3mm,当d=12mm,s分别为7mm(见曲线1), 8mm(见曲线2), 9mm(见曲线3), 10mm(见曲线4), 11mm(见曲线5)时的时域图如图 14所示。图中可以清晰地读取直达波信号R和反射信号Rr的到达时,由信号传播距离和时间差可知,R与Rr信号的波速为2.24km/s,符合材料中的表面波波速。由混凝土材料参量计算可得表面波理论波速为2.22km/s,有限元误差率为0.90%。

Figure 14. Time domain diagram when d=12mm, s=7mm~11m
在得到表面波的波速与频率的基础上,可以求得该混凝土有限元模型中,当激发条件为脉冲激光的上升时间5ns,光斑半径取为100μm时,直达表面波波长为3.58mm。该波长可指导后续的研究。
另外,在激光源逼近缺陷边沿过程中,在R和Rr峰之间的振荡也越来越明显,这是由于表面缺陷自由边界的反射增强,同时,激光激发多种声波模式受缺陷的影响发生了模式转换,在近场区域叠加在一起,从而引起信号幅值的显著增大[17-18]。
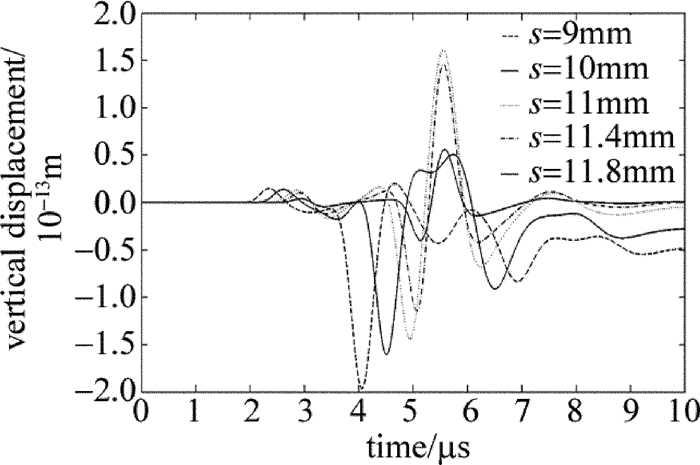
读取信号的峰峰值,并在s为9mm~12mm的范围内以0.2mm为单位,增加研究数量,呈现更丰富的细节。部分时域图如图 15所示。从时域图上看,当s < 11mm,仍可以清晰地分辨出直达波信号和反射波信号,但当信号峰峰值达到最大值后,当激光源继续向缺陷移动,s为11mm,11.4mm,11.8mm对应信号中,原直达波信号时间分别为4.96μs, 5.06μs, 5.14μs,原反射波时间分别为6.176μs, 6.196μs, 6.248μs,由信号传播距离和时间差可得,R与Rr信号的波速大于5km/s,与表面波波速2.22km/s不一致,也与纵波波速3.78km/s、横波波速2.44km/s不同,是在激光近场激发这种特殊条件下,叠加之后形成的声信号。

Figure 15. Time domain diagram when d=12mm, s=9mm~11.8mm
同时,由图 15可以发现,s为11mm, 11.4mm, 11.8mm时,信号中的正极性峰值到达时不改变。
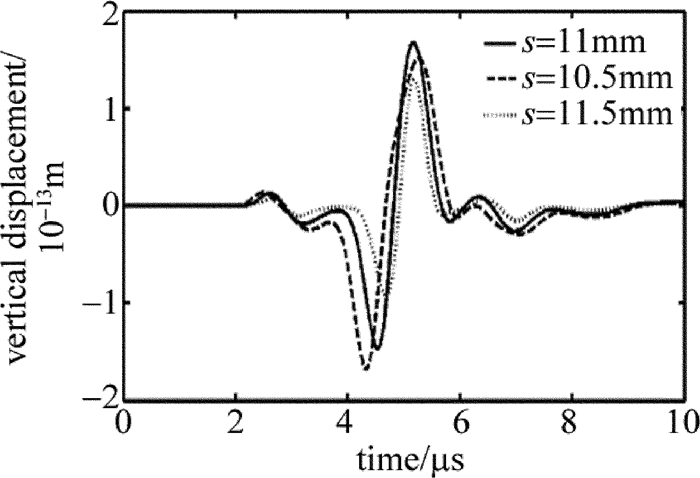
当缺陷深度为5mm, 7mm时,保持接收与激发条件与上面一致时,接收点至激光源的距离分别为10.5mm, 11mm, 11.5mm的时域图如图 16、图 17所示。当缺陷深度为5mm、峰峰值对应s为10.5mm, 11mm, 11.5mm时, 分别为0.3160×10-12m, 0.3128×10-12m, 0.2233×10-12m;当缺陷深度为7mm、峰峰值对应s为10.5mm, 11mm, 11.5mm时, 分别为0.3187×10-12m, 0.3135×10-12m, 0.2236×10-12m。当缺陷深度改变时,信号仍然在s=11mm处拥有典型的双极性特征,随后在s=11.5mm时峰峰值降低,正极性信号的峰值到达时不改变。另外,当缺陷深度大于表面波波长时,表面波反射能量增强,使得在s=10.5mm处峰峰值大于s=11mm处的峰峰值,但该现象不会影响根据峰峰值判断缺陷位置。
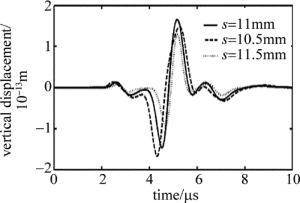
Figure 16. Signal characteristics with 5mm defect depth
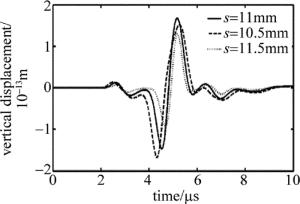
Figure 17. Signal characteristics with 7mm defect depth
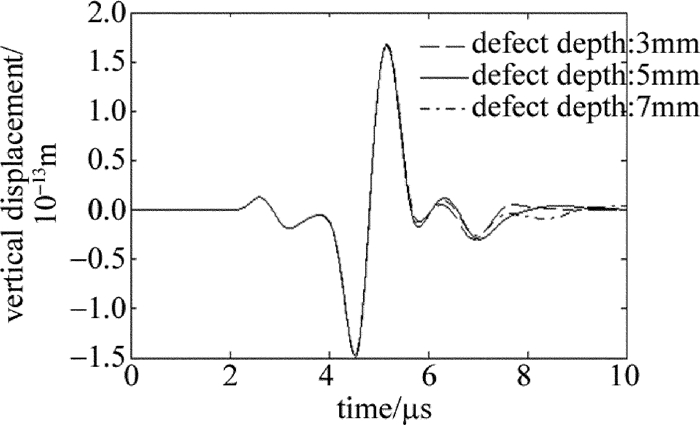
当缺陷深度改变时,固定接收点和激发点,信号对比如图 18所示。峰峰值的改变可以忽略不记,即峰峰值不随缺陷深度的改变而改变。而双极性信号之后的振荡信号包含了缺陷深度的信息。
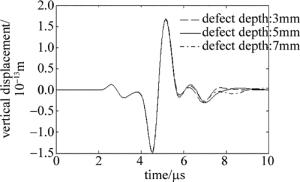
Figure 18. Signal contrast when defect depth is 3mm, 5mm, 7mm and s=11mm
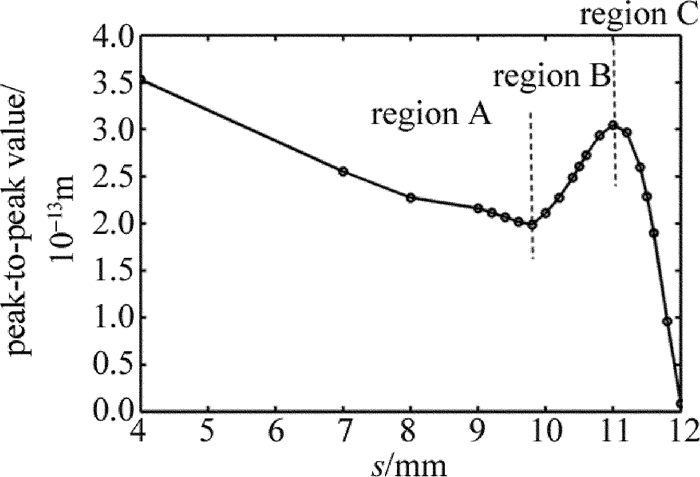
下面对峰峰值-接收点至激光源的距离关系图(见图 19)进行详细的说明,凹痕宽度为0.2mm、深度为3mm、d=12mm、s为4mm~9.8mm时,由于混凝土中的衰减特性,首波幅值减少,使得峰峰值降低;当激光源近一步接近缺陷边缘时,波在缺陷处的反射增强,同时叠加上缺陷处的声波模式转化,形成一个正向的波形,此时,激光源与缺陷的距离为2.2mm,在一个波长以内,由路程和波速可知,直达表面波与叠加后的波形到达时间差在2μs以内,以上因素最终使得波形呈双极性的特征,并在s=11mm处取得最大值;当激光源继续接近缺陷边缘,由于激光源空间上的高斯分布特性,激发条件在近缺陷处发生改变,入射能量减少,峰峰值减低,并在缺陷边沿处取得最小值。

Figure 19. The change of signals' peak-to-peak value with s
综上所述,当激光扫描带有裂缝的混凝土表面,表面波探头接收超声信号,由于缺陷的存在使得信号会有峰峰值的改变,可以根据峰峰值-接收点至激光源的距离图判断缺陷位置。
2.1. 模型与有限元参量
2.2. 有限元模型的计算及结果讨论
2.2.1. 瑞利阻尼对有限元结果的影响

2.2.2. 超声信号分析与结果讨论

-
本文中探究了激光扫描混凝土裂缝的超声检测技术,实现了混凝土裂缝的快速定位。
(1) 在实验中,通过激光超声场检测仪扫描含有裂缝的混凝土表面,使用最高工作频率为500kHz的表面波探头接收超声信号。通过激光矩阵激发的表面波信号的峰峰值成像,结合信号的双极性特征,可以检测到混凝土表面的裂缝边界。
(2) 采用有限元方法模拟并分析了激光在混凝土中激发的声场,发现当固定接收点,随着接收点至激光源的距离的改变,信号峰峰值有3个变化区间。另外,双极性特征只与激发位置有关,而与裂缝深度没有直接关系。
 DownLoad:
DownLoad: