 Map
Map
 WeChat
WeChat Email alert
Email alert RSS
RSSCurrent Articles
Display Method:
 [Abstract]
[Abstract] [PDF 244KB]
[PDF 244KB]
2024,
48(2):
145-152.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.001
 [FullText HTML]
[FullText HTML]
Abstract:
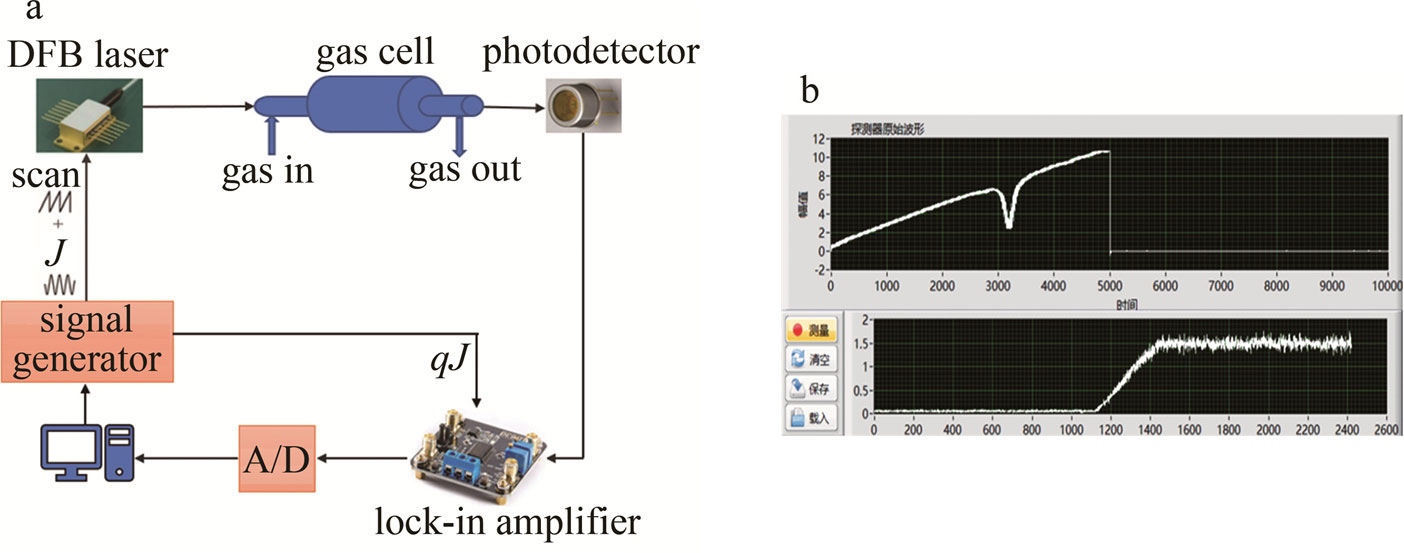
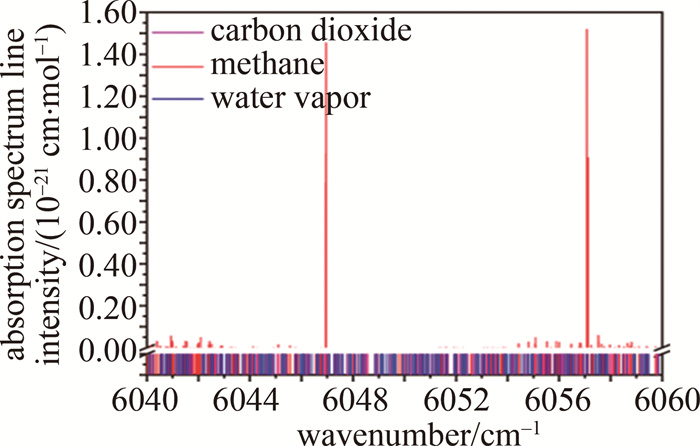
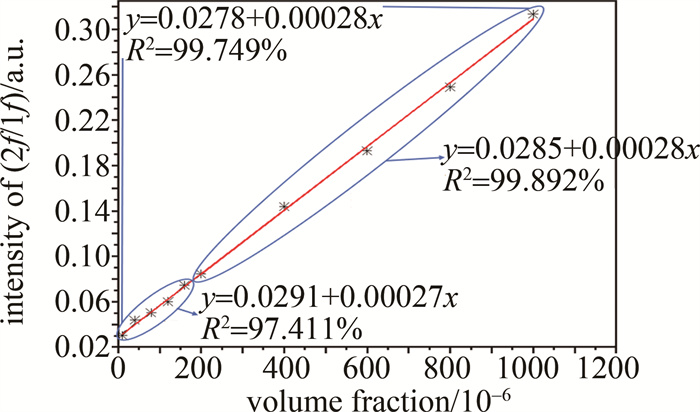
In order to accurately determine the volume fraction of the gas to be measured and to improve the stability of tunable diode laser absorption spectroscopy (TDLAS), the scan signal of the TDLAS gas detection system was optimized. Based on the HITRAN database, the absorption peak of methane gas near 1654 nm was selected, and the absorption coefficients of the gas mixture containing methane, water vapor and carbon dioxide were calculated; a visual simulation tool was used to simulate the gas detection system theoretically, and the simulation results were verified by the gas detection system. The results show that the stability of the detection system is improved by optimizing the scanning signal, and the deviation value is reduced from 0.3% to 0.07%; the inverse model of the mean value of the second harmonic signal and the volume fraction of the gas is established, and the correlation coefficient of the linear fit R2=99.99%. This study has a certain reference value for improving the stability and accuracy of the TDLAS system and achieving high stability gas detection.
In order to accurately determine the volume fraction of the gas to be measured and to improve the stability of tunable diode laser absorption spectroscopy (TDLAS), the scan signal of the TDLAS gas detection system was optimized. Based on the HITRAN database, the absorption peak of methane gas near 1654 nm was selected, and the absorption coefficients of the gas mixture containing methane, water vapor and carbon dioxide were calculated; a visual simulation tool was used to simulate the gas detection system theoretically, and the simulation results were verified by the gas detection system. The results show that the stability of the detection system is improved by optimizing the scanning signal, and the deviation value is reduced from 0.3% to 0.07%; the inverse model of the mean value of the second harmonic signal and the volume fraction of the gas is established, and the correlation coefficient of the linear fit R2=99.99%. This study has a certain reference value for improving the stability and accuracy of the TDLAS system and achieving high stability gas detection.









2024,
48(2):
153-158.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.002
Abstract:
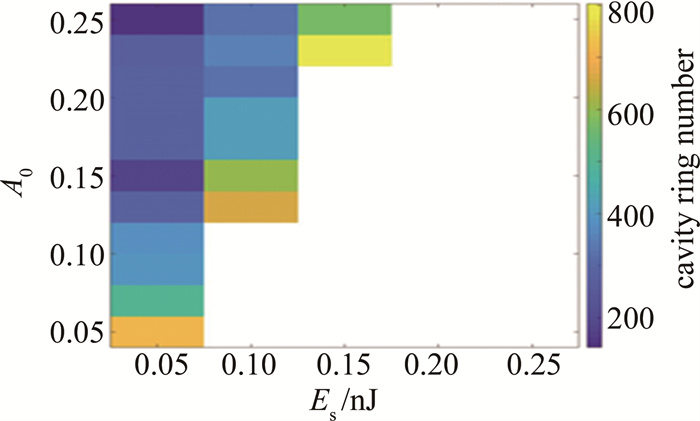
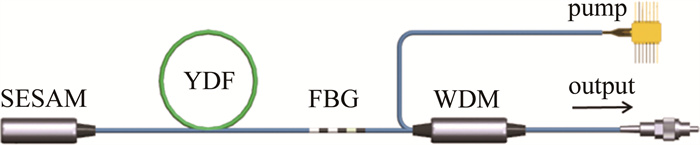
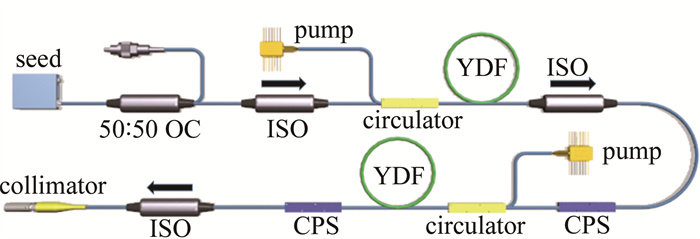
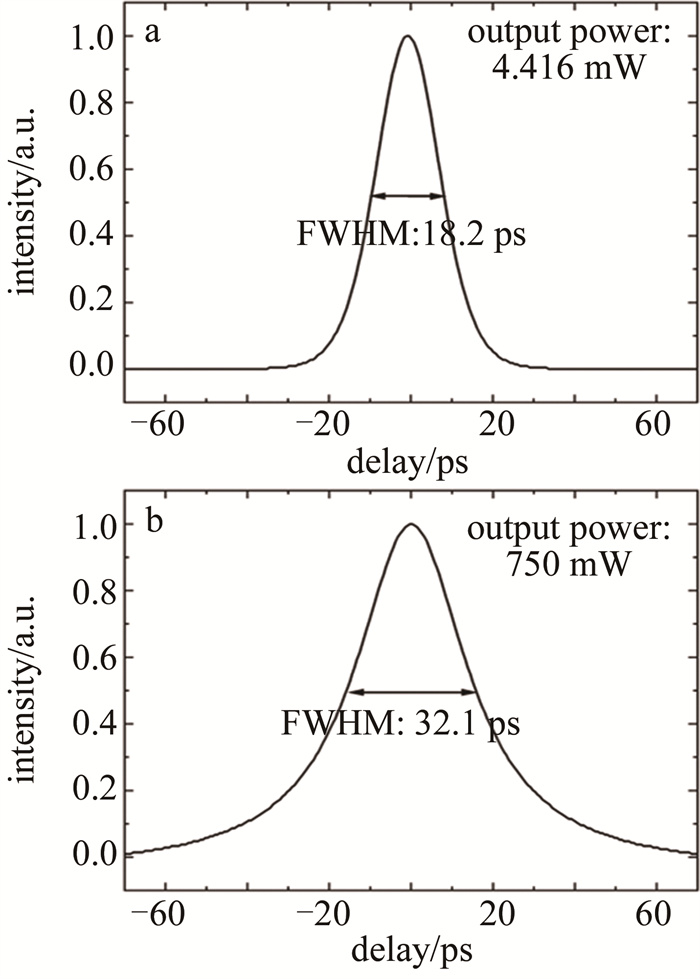
To obtain the stable mode-locked pulse train, the effects of filter bandwidth, saturable absorber (SA) modulation depth, and SA recovery time on mode-locking were analyzed numerically by the split-step Fourier method. According to the calculation results, the laser is established. The oscillator can generate self-starting dissipative soliton pulses train with a spectrum bandwidth of 0.104 nm and a repetition rate of 102.32 MHz. Meanwhile, the pulse train shows a slow broadening rate and good shape-preserving ability in the amplification process. This study indicates that this laser will have great application prospects in fiber probes, frequency comb, parameters optic and other fields.
To obtain the stable mode-locked pulse train, the effects of filter bandwidth, saturable absorber (SA) modulation depth, and SA recovery time on mode-locking were analyzed numerically by the split-step Fourier method. According to the calculation results, the laser is established. The oscillator can generate self-starting dissipative soliton pulses train with a spectrum bandwidth of 0.104 nm and a repetition rate of 102.32 MHz. Meanwhile, the pulse train shows a slow broadening rate and good shape-preserving ability in the amplification process. This study indicates that this laser will have great application prospects in fiber probes, frequency comb, parameters optic and other fields.



2024,
48(2):
159-165.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.003
Abstract:
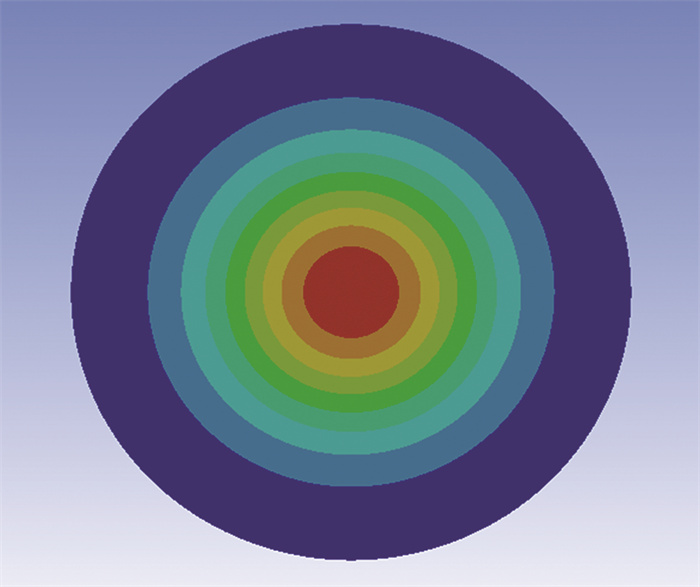
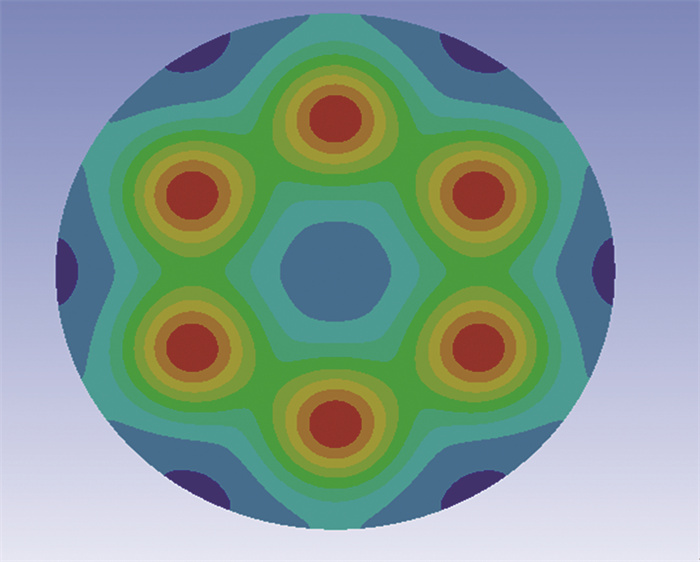
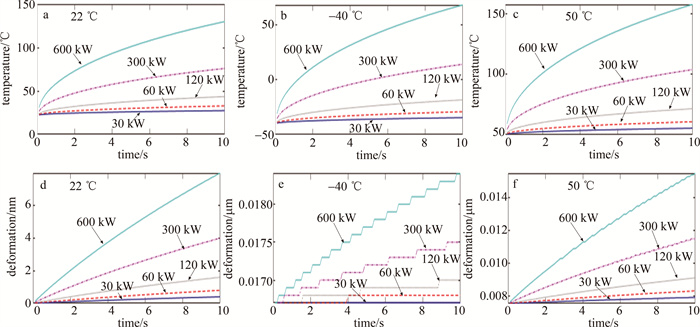
A theoretical model of the thermal simulation was established to study the problem of temperature rise and thermal deformation of the beam combiner mirror in the optical path of a high-energy laser system caused by strong laser radiation. The temperature rise and thermal deformation of the beam combiner mirror with silicon, silicon carbide, quartz glass, and glass-ceramics as substrate materials were analyzed by finite-element analysis software under different laser power irradiation. At the same time, the temperature rise and thermal deformation of the beam combiner mirror with quartz glass and glass-ceramics as substrate materials under extreme conditions were simulated and analyzed. The results show that at 22 ℃, after 10 s of 30 kW single-beam laser irradiation, the temperature of silicon carbide is the lowest at 23.718 ℃ among the four substrate materials, and the thermal deformation of glass-ceramics is the smallest at 0.00115 μm. The thermal deformation of glass-ceramics is 0.000399 μm when irradiated by a six-beam laser with a total power of 30 kW, while the thermal deformation of quartz glass is 18.8 times higher than that of glass-ceramics at the same six-beam. Under extreme conditions, the substrate material with the smallest thermal deformation is also glass-ceramics. Therefore, among the four substrate materials, glass-ceramics is the most suitable as substrate material for the beam combiner mirror in the high-energy laser system. The research results have certain practical reference values for the design of high-energy laser systems.
A theoretical model of the thermal simulation was established to study the problem of temperature rise and thermal deformation of the beam combiner mirror in the optical path of a high-energy laser system caused by strong laser radiation. The temperature rise and thermal deformation of the beam combiner mirror with silicon, silicon carbide, quartz glass, and glass-ceramics as substrate materials were analyzed by finite-element analysis software under different laser power irradiation. At the same time, the temperature rise and thermal deformation of the beam combiner mirror with quartz glass and glass-ceramics as substrate materials under extreme conditions were simulated and analyzed. The results show that at 22 ℃, after 10 s of 30 kW single-beam laser irradiation, the temperature of silicon carbide is the lowest at 23.718 ℃ among the four substrate materials, and the thermal deformation of glass-ceramics is the smallest at 0.00115 μm. The thermal deformation of glass-ceramics is 0.000399 μm when irradiated by a six-beam laser with a total power of 30 kW, while the thermal deformation of quartz glass is 18.8 times higher than that of glass-ceramics at the same six-beam. Under extreme conditions, the substrate material with the smallest thermal deformation is also glass-ceramics. Therefore, among the four substrate materials, glass-ceramics is the most suitable as substrate material for the beam combiner mirror in the high-energy laser system. The research results have certain practical reference values for the design of high-energy laser systems.



2024,
48(2):
166-170.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.004
Abstract:
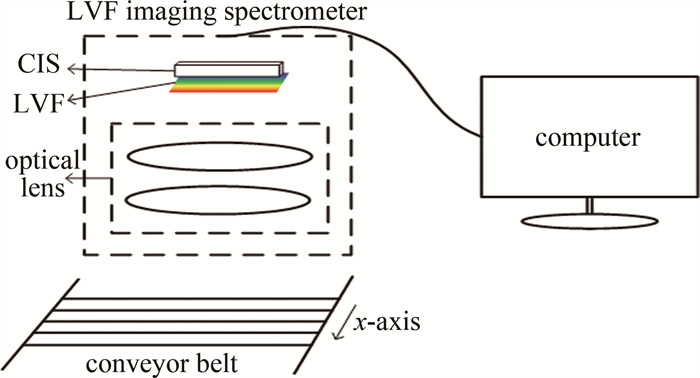
To achieve fast and accurate measurement of the luminance of flat-panel displays, an imaging spectrometer based on linear variable filters was used for theoretical analysis and experimental validation. The principle, structure, and application characteristics of the imaging spectrometer with linear variable filters as the core was discussed and a mathematical conversion model of light source luminance-output grayscale value was established. A spectral calibration and radiation calibration device based on an LED integrating sphere light source and a spectroradiometer was developed, and the spectral cube data of the target was obtained, along with the absolute spectral power distribution curve of each point. The results show that the relative display error is less than 3%, meeting the first-level measurement accuracy requirement of the national standard for luminance measurement. The rapid and accurate measurement of surfece light source luminance is realized. This study provides a favorable reference for optimizing the quality control and product adjustment of the display industry.
To achieve fast and accurate measurement of the luminance of flat-panel displays, an imaging spectrometer based on linear variable filters was used for theoretical analysis and experimental validation. The principle, structure, and application characteristics of the imaging spectrometer with linear variable filters as the core was discussed and a mathematical conversion model of light source luminance-output grayscale value was established. A spectral calibration and radiation calibration device based on an LED integrating sphere light source and a spectroradiometer was developed, and the spectral cube data of the target was obtained, along with the absolute spectral power distribution curve of each point. The results show that the relative display error is less than 3%, meeting the first-level measurement accuracy requirement of the national standard for luminance measurement. The rapid and accurate measurement of surfece light source luminance is realized. This study provides a favorable reference for optimizing the quality control and product adjustment of the display industry.




2024,
48(2):
171-179.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.005
Abstract:
In order to verify the applicability of the rapid measurement method of energy performance parameters of propellant based on pulsed laser ablation, a pulsed laser interaction platform with energetic materials and an experimental platform for transient diagnoses such as shockwave and plasma image were firstly established. Based on this platform, the shockwave and plasma characteristics of single, double, and triple base propellant and monocrystal rock sugar under pulsed laser ablation were studied experimentally. The influence of laser parameters on the ablation process of pulse laser and the difference of shockwave and plasma image between the single base propellant and monocrystal rock sugar was obtained. The results show that the shockwave and plasma expansion characteristics of single base propellant are mainly affected by the chemical reaction energy release of energetic substances, while that of rock sugar is mainly affected by laser irradiance. Furthermore, taking single, double, and triple base propellants as samples, based on shockwave propagation distance parameters and laser energy parameters, the linear calibration models of shockwave characteristic velocity and its explosive force, explosive heat, and explosive temperature were established by using support vector machines regression algorithm. The determinate coefficient R2 values were 0.9912, 0.9998, and 0.9999, respectively. The results show that this method predicts the explosive force, explosive heat, and explosive temperature of the propellant well and provides a reference for the study of the interaction between pulsed laser and energetic materials.
In order to verify the applicability of the rapid measurement method of energy performance parameters of propellant based on pulsed laser ablation, a pulsed laser interaction platform with energetic materials and an experimental platform for transient diagnoses such as shockwave and plasma image were firstly established. Based on this platform, the shockwave and plasma characteristics of single, double, and triple base propellant and monocrystal rock sugar under pulsed laser ablation were studied experimentally. The influence of laser parameters on the ablation process of pulse laser and the difference of shockwave and plasma image between the single base propellant and monocrystal rock sugar was obtained. The results show that the shockwave and plasma expansion characteristics of single base propellant are mainly affected by the chemical reaction energy release of energetic substances, while that of rock sugar is mainly affected by laser irradiance. Furthermore, taking single, double, and triple base propellants as samples, based on shockwave propagation distance parameters and laser energy parameters, the linear calibration models of shockwave characteristic velocity and its explosive force, explosive heat, and explosive temperature were established by using support vector machines regression algorithm. The determinate coefficient R2 values were 0.9912, 0.9998, and 0.9999, respectively. The results show that this method predicts the explosive force, explosive heat, and explosive temperature of the propellant well and provides a reference for the study of the interaction between pulsed laser and energetic materials.









2024,
48(2):
180-187.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.006
Abstract:
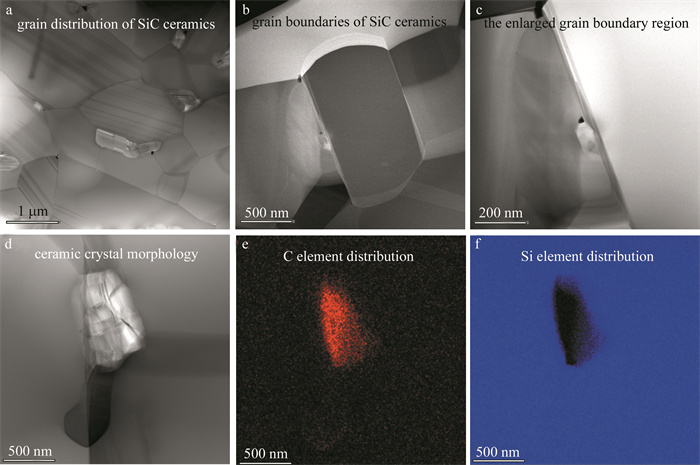
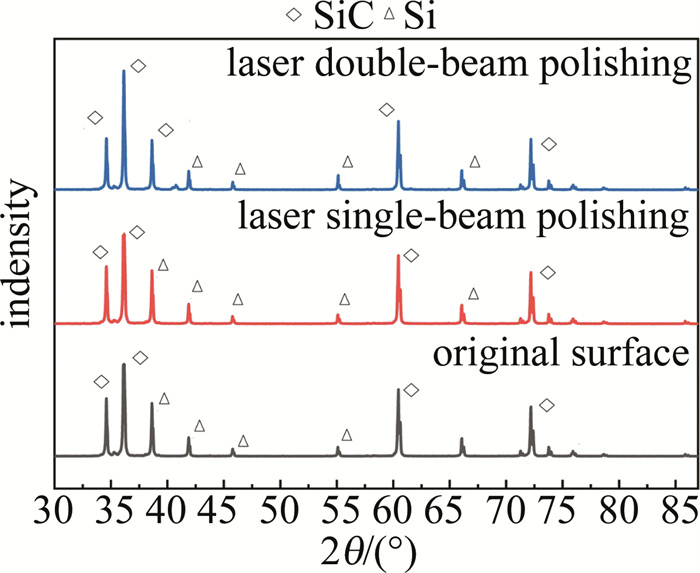
In order to improve the polishing precision of SiC ceramics effectively, a kind of polishing technology, namely infrared nanosecond and ultrafast ultraviolet picosecond laser for silicon carbide ceramics, was designed. The effects of laser power, repetition rate, scanning rate, and defocus on SiC surface quality were investigated experimentally by using infrared nanosecond laser and ultrafast ultraviolet picosecond laser double-beam polishing mothed. The results show that the surface of the laser double-beam polished silicon carbide ceramics is compared with that of the single ultraviolet picosecond polishing ceramics, the roughness of the laser double-beam polishing and single-beam polishing decreases from 2.87 μm to 0.42 μm and 0.53 μm respectively, with the laser power 24 W, the scanning speed is 200 mm/s, the laser repetition rate is 500 kHz, and the defocus is 1 mm. The SiC ceramics are densified by laser double-beam polishing, the ceramic surface is recrystallized and neat after polishing, and the average grain size of the SiC polished surface is 1.48 μm, and the surface mechanical properties are improved. The results provide the guide for precision laser polishing of ceramics and other hard and brittle materials.
In order to improve the polishing precision of SiC ceramics effectively, a kind of polishing technology, namely infrared nanosecond and ultrafast ultraviolet picosecond laser for silicon carbide ceramics, was designed. The effects of laser power, repetition rate, scanning rate, and defocus on SiC surface quality were investigated experimentally by using infrared nanosecond laser and ultrafast ultraviolet picosecond laser double-beam polishing mothed. The results show that the surface of the laser double-beam polished silicon carbide ceramics is compared with that of the single ultraviolet picosecond polishing ceramics, the roughness of the laser double-beam polishing and single-beam polishing decreases from 2.87 μm to 0.42 μm and 0.53 μm respectively, with the laser power 24 W, the scanning speed is 200 mm/s, the laser repetition rate is 500 kHz, and the defocus is 1 mm. The SiC ceramics are densified by laser double-beam polishing, the ceramic surface is recrystallized and neat after polishing, and the average grain size of the SiC polished surface is 1.48 μm, and the surface mechanical properties are improved. The results provide the guide for precision laser polishing of ceramics and other hard and brittle materials.






2024,
48(2):
188-195.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.007
Abstract:
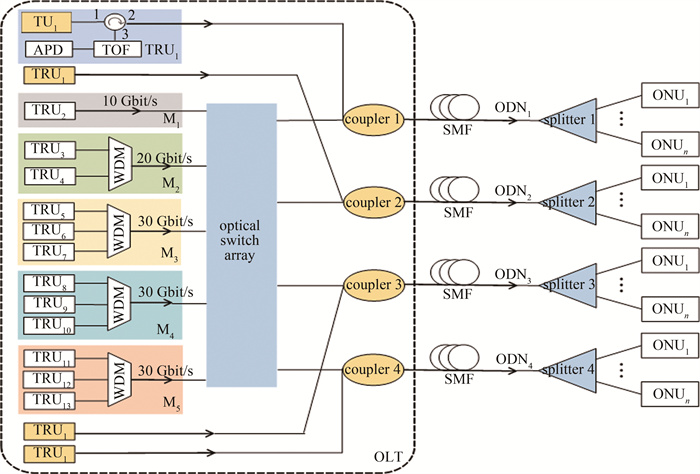
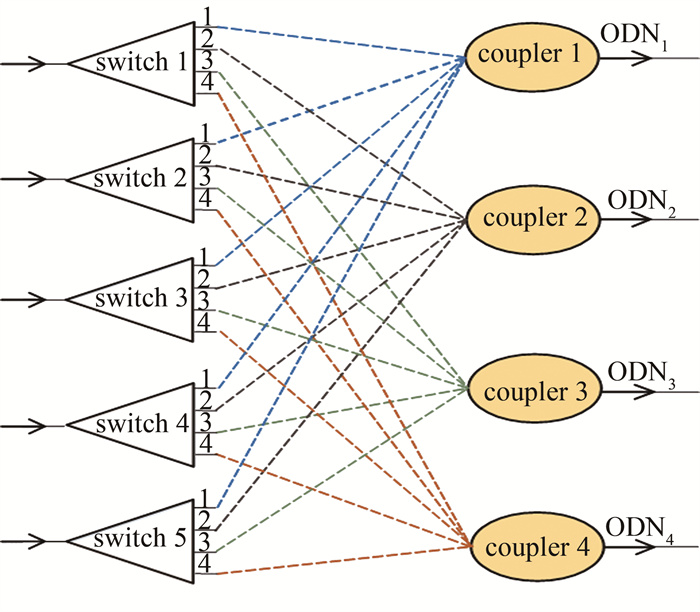
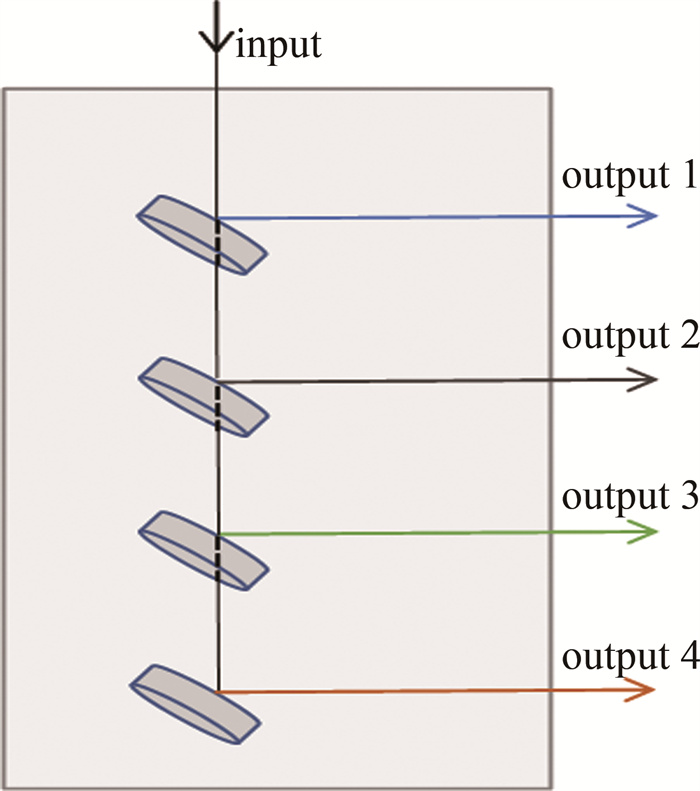
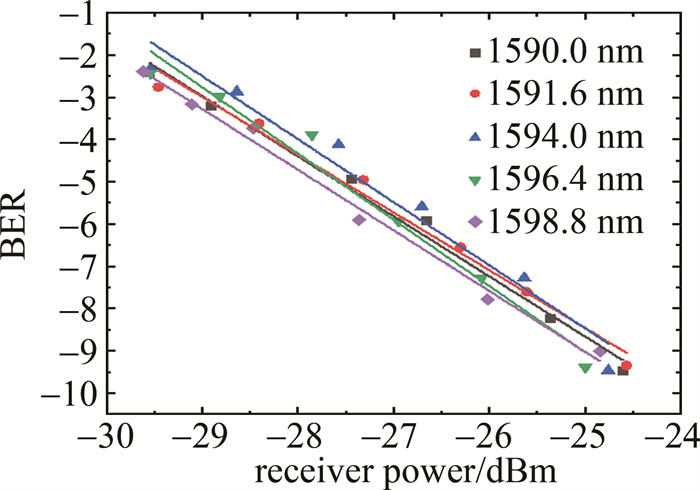
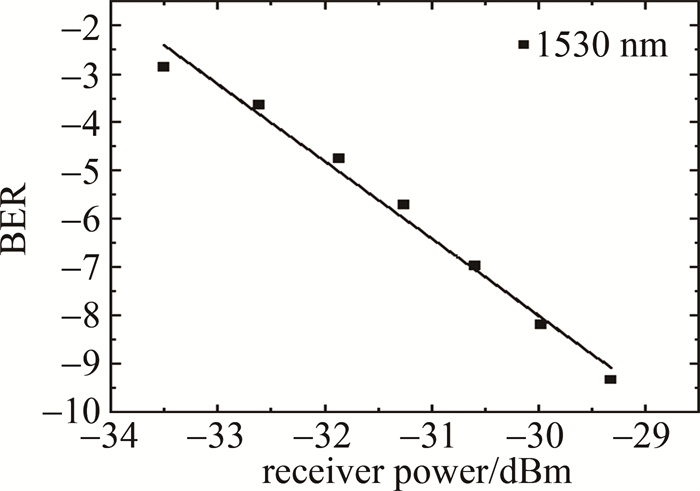
In order to meet the increasing service traffic requirements of access networks and solve the problem that wavelengths between different passive optical networks cannot be flexibly allocated due to fixed architecture and limited resource dimensions, a time and wavelength division multiplexed passive optical network(TWDM-PON) structure combining lasers emitting fixed wavelengths and optical switch array was proposed. In this new system structure, the downstream wavelength resources were centralized, and the method of configuring the optical switch array at the central office was used to achieve flexible scheduling of wavelengths between different networks. This system can be used to solve the problems such as load balancing, traffic "tidal effect", and low utilization of network resources while reducing overall costs. The feasibility of the system was verified by theoretical analysis and simulation experiments, and the compatibility of the structure with the traditional passive optical network, the sharing of wavelength resources, the low cost of the system, and the characteristics of energy saving were analyzed and demonstrated. Experimental results show that the signal can cover a transmission distance of 30 km without dispersion compensation and can serve 512 users at the same time. This study can provide a reference for passive optical network deployment in typical application scenarios.
In order to meet the increasing service traffic requirements of access networks and solve the problem that wavelengths between different passive optical networks cannot be flexibly allocated due to fixed architecture and limited resource dimensions, a time and wavelength division multiplexed passive optical network(TWDM-PON) structure combining lasers emitting fixed wavelengths and optical switch array was proposed. In this new system structure, the downstream wavelength resources were centralized, and the method of configuring the optical switch array at the central office was used to achieve flexible scheduling of wavelengths between different networks. This system can be used to solve the problems such as load balancing, traffic "tidal effect", and low utilization of network resources while reducing overall costs. The feasibility of the system was verified by theoretical analysis and simulation experiments, and the compatibility of the structure with the traditional passive optical network, the sharing of wavelength resources, the low cost of the system, and the characteristics of energy saving were analyzed and demonstrated. Experimental results show that the signal can cover a transmission distance of 30 km without dispersion compensation and can serve 512 users at the same time. This study can provide a reference for passive optical network deployment in typical application scenarios.




2024,
48(2):
196-203.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.008
Abstract:
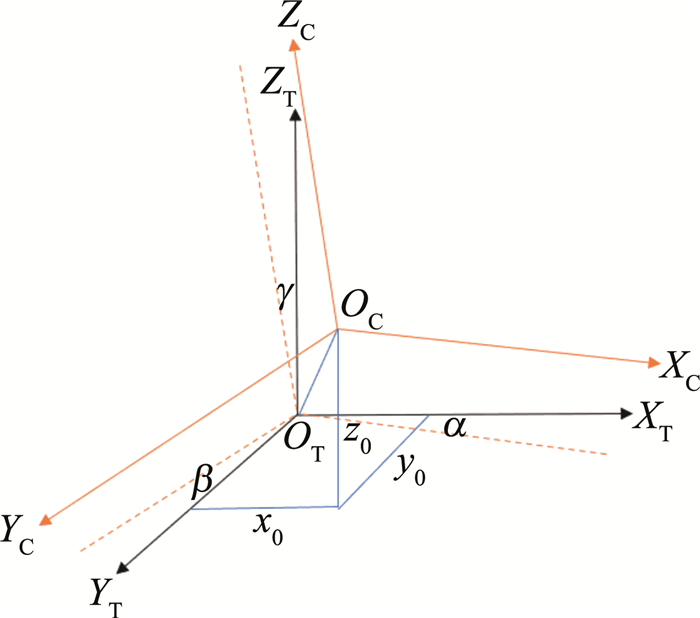
In order to achieve high-precision camera calibration of the image total station telescope camera and a wide-angle camera, a camera calibration model for the image total station in rotary photography mode was derived using a single target rotary photography method, and the correlation analysis of model parameters was performed. Aiming at the parameter coupling problem, a double-face observation method was proposed for parameter decoupling. The feasibility of the single target rotary photography method was experimentally verified, and high-precision calibration results of the image total station telescope camera and the wide-angle camera were obtained. The results show that the camera parameters obtained from calibration can be used for image measurement at different photographic distances, with an average reprojection error of 1.0 pixel at the calibration points of the telescope camera, and the corresponding image angular resolution is 2.0″. The average reprojection error at the calibration point during fixed focus photography with a telescope camera is 0.15 pixel, and the corresponding image angular resolution is 0.3″. The average reprojection error at the calibration point of a wide-angle camera is 0.6 pixel, and the corresponding image angular resolution is 13.3″. This research has certain reference significance for improving the image measurement accuracy of the image total station and expanding its related applications.
In order to achieve high-precision camera calibration of the image total station telescope camera and a wide-angle camera, a camera calibration model for the image total station in rotary photography mode was derived using a single target rotary photography method, and the correlation analysis of model parameters was performed. Aiming at the parameter coupling problem, a double-face observation method was proposed for parameter decoupling. The feasibility of the single target rotary photography method was experimentally verified, and high-precision calibration results of the image total station telescope camera and the wide-angle camera were obtained. The results show that the camera parameters obtained from calibration can be used for image measurement at different photographic distances, with an average reprojection error of 1.0 pixel at the calibration points of the telescope camera, and the corresponding image angular resolution is 2.0″. The average reprojection error at the calibration point during fixed focus photography with a telescope camera is 0.15 pixel, and the corresponding image angular resolution is 0.3″. The average reprojection error at the calibration point of a wide-angle camera is 0.6 pixel, and the corresponding image angular resolution is 13.3″. This research has certain reference significance for improving the image measurement accuracy of the image total station and expanding its related applications.





2024,
48(2):
204-209.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.009
Abstract:
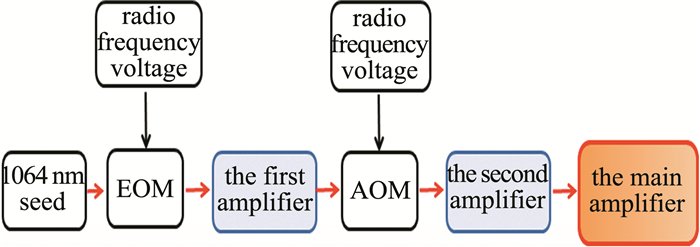
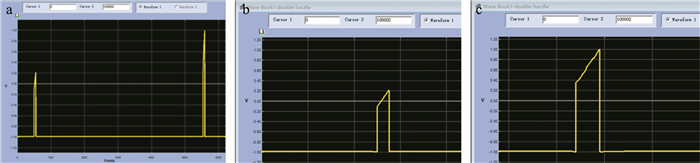
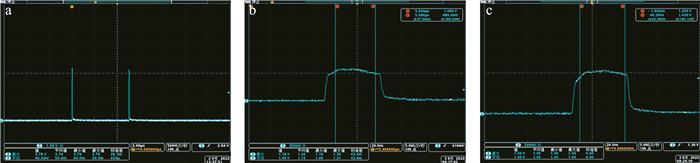
Programmable multi-pulse green laser was developed to satisfy the application requirements of a planer laser induced fluorescence and velocity interferometer system for any reflector. In the process of amplification, because the front edge gain of the laser pulse was fast and the back edge gain was slow, the laser pulse waveform was distorted. Adopting light intensity programmable technology, input the long pulse voltage waveform into an arbitrary waveform generator and load it onto the electro-optic modulator. In order to control the output light intensity in the time domain and output multiple pulses at the same time, the software was used to edit the long pulse voltage waveform according to the feedback of the output laser waveform. The results indicate that the waveform distortion during the amplification process is corrected. The following green laser square wave pulses are obtained: Single pulse with 110 ns pulse width; double pulses with 5 μs pulse interval and 50 ns pulse width; three pulses with pulse widths of 40 ns, 50 ns and 60 ns and pulse interval of 2 μs and 1 μs respectively. Of course, if necessary, by editing the long pulse voltage waveform, we can also get pulses of other parameters so as to obtain a laser with adjustable pulse number, waveform, pulse width, and pulse interval. This study provides a reference for planar laser-induced fluorescence technology and reflector velocity interferometer system.
Programmable multi-pulse green laser was developed to satisfy the application requirements of a planer laser induced fluorescence and velocity interferometer system for any reflector. In the process of amplification, because the front edge gain of the laser pulse was fast and the back edge gain was slow, the laser pulse waveform was distorted. Adopting light intensity programmable technology, input the long pulse voltage waveform into an arbitrary waveform generator and load it onto the electro-optic modulator. In order to control the output light intensity in the time domain and output multiple pulses at the same time, the software was used to edit the long pulse voltage waveform according to the feedback of the output laser waveform. The results indicate that the waveform distortion during the amplification process is corrected. The following green laser square wave pulses are obtained: Single pulse with 110 ns pulse width; double pulses with 5 μs pulse interval and 50 ns pulse width; three pulses with pulse widths of 40 ns, 50 ns and 60 ns and pulse interval of 2 μs and 1 μs respectively. Of course, if necessary, by editing the long pulse voltage waveform, we can also get pulses of other parameters so as to obtain a laser with adjustable pulse number, waveform, pulse width, and pulse interval. This study provides a reference for planar laser-induced fluorescence technology and reflector velocity interferometer system.











2024,
48(2):
210-215.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.010
Abstract:
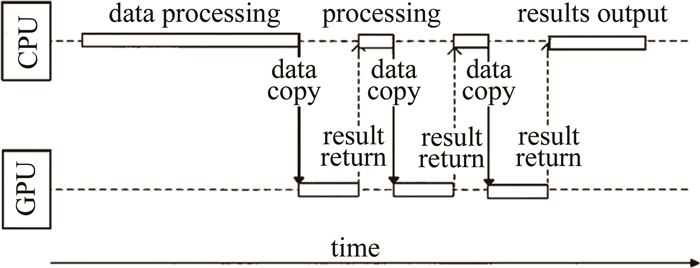
In order to make full use of the computing performance of the computer to improve the speed of computer-generated hologram(CGH) based on the point source model, a fast CGH generation system based on a multi-core central processing unit (CPU) and graphics processing unit (GPU) was designed and optimized in this paper. First of all, the system used the unified architecture platform to design and implement a CGH generation system based on the point source model and proposes the optimization strategy of computing. Then, an optimized calculation formula was proposed to reduce the amount of calculation. Finally, the task debugging was optimized to build a CPU parallel computing system. One of the cores was responsible for startup and function, and data transmission, while the other cores undertook some computing tasks to further improve the computing speed. The results show that, the designed system makes full use of the performance of both CPU and GPU. Under the same configuration of computing hardware, the speedup ratio of CGH generation is 4~4.75 times higher than that of CGH generation in a single GPU system. Heterogeneous systems can effectively improve the generation speed of computer-generated holograms. The research is helpful for generating a 3-D scene hologram quickly.
In order to make full use of the computing performance of the computer to improve the speed of computer-generated hologram(CGH) based on the point source model, a fast CGH generation system based on a multi-core central processing unit (CPU) and graphics processing unit (GPU) was designed and optimized in this paper. First of all, the system used the unified architecture platform to design and implement a CGH generation system based on the point source model and proposes the optimization strategy of computing. Then, an optimized calculation formula was proposed to reduce the amount of calculation. Finally, the task debugging was optimized to build a CPU parallel computing system. One of the cores was responsible for startup and function, and data transmission, while the other cores undertook some computing tasks to further improve the computing speed. The results show that, the designed system makes full use of the performance of both CPU and GPU. Under the same configuration of computing hardware, the speedup ratio of CGH generation is 4~4.75 times higher than that of CGH generation in a single GPU system. Heterogeneous systems can effectively improve the generation speed of computer-generated holograms. The research is helpful for generating a 3-D scene hologram quickly.







2024,
48(2):
216-222.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.011
Abstract:
In order to explore the influence of cavitation on the stability of the micro-water beam of the water guide laser, the numerical simulation analysis of the water jet from a typical nozzle was carried out by using the computational fluid dynamics method without considering cavitation and considering cavitation respectively, and the generation mechanism of cavitation and its influence on the stability of the micro-water beam was studied. The calculation results show that under the nozzle structure with the inlet diameter of 0.1 mm, the length-diameter ratio of the cylinder section of 1, and the sharp upper edge, with the inlet pressure increasing from 0.2 MPa to 16 MPa, the re-attachment length of the water jet after separation from the nozzle wall gradually increases, and cavitation will lead to the extension of the length. When the inlet pressure is less than 6 MPa, the water jet, without considering cavitation, will flow down the nozzle wall after stabilization, and the addition of a cavitation model can make the water beam form a flipped flow. The simulation results have important reference values for the design of nozzle structures that meet the requirements of water-guide laser technology.
In order to explore the influence of cavitation on the stability of the micro-water beam of the water guide laser, the numerical simulation analysis of the water jet from a typical nozzle was carried out by using the computational fluid dynamics method without considering cavitation and considering cavitation respectively, and the generation mechanism of cavitation and its influence on the stability of the micro-water beam was studied. The calculation results show that under the nozzle structure with the inlet diameter of 0.1 mm, the length-diameter ratio of the cylinder section of 1, and the sharp upper edge, with the inlet pressure increasing from 0.2 MPa to 16 MPa, the re-attachment length of the water jet after separation from the nozzle wall gradually increases, and cavitation will lead to the extension of the length. When the inlet pressure is less than 6 MPa, the water jet, without considering cavitation, will flow down the nozzle wall after stabilization, and the addition of a cavitation model can make the water beam form a flipped flow. The simulation results have important reference values for the design of nozzle structures that meet the requirements of water-guide laser technology.











2024,
48(2):
223-228.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.012
Abstract:
In order to scientifically evaluate the protective effect of the laser diffuse reflector in the laser angle deception jamming process, the coordinate transformation method was used to compare the energy density of the indicating laser received by the seeker and the jamming laser in the same coordinate system and the jamming coverage rate of the guidance airspace was calculated, and then the influence of the difference of the normal direction of the diffuse reflection plate and the target on the protective effect was analyzed. The research shows that for a typical-cubic type target, when the normal of the diffuse reflector is the same azimuth as the normal of the vertical plane of the target, and the pitch difference is between 0° and 60°, the guidance airspace jamming coverage of the vertical plane is 100%. Only when the normal direction of the diffuse reflector is the same as the normal direction of the horizontal plane at the top of the target the guidance airspace jamming coverage of the plane is 100%. In order to achieve comprehensive protection, it is necessary to set up multiple diffuse reflectors for protection according to the direction of the laser attack and the possible irradiated surface. This research method and results have reference values for reasonable layout and use of laser diffuse reflector.
In order to scientifically evaluate the protective effect of the laser diffuse reflector in the laser angle deception jamming process, the coordinate transformation method was used to compare the energy density of the indicating laser received by the seeker and the jamming laser in the same coordinate system and the jamming coverage rate of the guidance airspace was calculated, and then the influence of the difference of the normal direction of the diffuse reflection plate and the target on the protective effect was analyzed. The research shows that for a typical-cubic type target, when the normal of the diffuse reflector is the same azimuth as the normal of the vertical plane of the target, and the pitch difference is between 0° and 60°, the guidance airspace jamming coverage of the vertical plane is 100%. Only when the normal direction of the diffuse reflector is the same as the normal direction of the horizontal plane at the top of the target the guidance airspace jamming coverage of the plane is 100%. In order to achieve comprehensive protection, it is necessary to set up multiple diffuse reflectors for protection according to the direction of the laser attack and the possible irradiated surface. This research method and results have reference values for reasonable layout and use of laser diffuse reflector.







2024,
48(2):
229-234.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.013
Abstract:
In order to improve the quality of dissimilar steel welding. Adopting laser welding technology welding of two heterogeneous materials, Q345B low alloy steel, and the 304 stainless steel. Under different laser powers, the welded joints were thoroughly characterized and analyzed using metallographic microscopy, scanning electron microscopy, and energy dispersive spectroscopy. Experimental data indicates that when the laser power is higher than 3 kW, the joint can be fully welded, and the weld sections of 4 kW, 4.5 kW and, 5 kW all present the waist phenomenon. The weld microstructure is typical lath martensite. The size of the lath martensite in the weld of 5 kW is smaller, showing the highest hardness value. The tensile strength of the weldment of 4 kW reaches 590 MPa. With the increase of laser power, the tensile strength of the weldment gradually decreases. In the weld, there are no M23C6 and σ phases, which have a great influence on the quality, but mainly Cr2Ni3, Fe2Ni3, and α-Fe phases. The results indicate that using laser wire filling welding technology can achieve high-quality welding of Q345B/304 dissimilar steel.
In order to improve the quality of dissimilar steel welding. Adopting laser welding technology welding of two heterogeneous materials, Q345B low alloy steel, and the 304 stainless steel. Under different laser powers, the welded joints were thoroughly characterized and analyzed using metallographic microscopy, scanning electron microscopy, and energy dispersive spectroscopy. Experimental data indicates that when the laser power is higher than 3 kW, the joint can be fully welded, and the weld sections of 4 kW, 4.5 kW and, 5 kW all present the waist phenomenon. The weld microstructure is typical lath martensite. The size of the lath martensite in the weld of 5 kW is smaller, showing the highest hardness value. The tensile strength of the weldment of 4 kW reaches 590 MPa. With the increase of laser power, the tensile strength of the weldment gradually decreases. In the weld, there are no M23C6 and σ phases, which have a great influence on the quality, but mainly Cr2Ni3, Fe2Ni3, and α-Fe phases. The results indicate that using laser wire filling welding technology can achieve high-quality welding of Q345B/304 dissimilar steel.









2024,
48(2):
235-239.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.014
Abstract:
In order to solve the problem of heat dissipation of the air-cooled laser whose output energy was not less than 220 mJ and whose repetition rate was 40 Hz, a 3-D model of the laser and the heat sink was designed and constructed, and thermal simulation software was used to conduct a thermal simulation of the heat dissipation of the laser. The analysis results were optimized and verified by experiments. The results show that when the ambient temperature is 55 ℃, the output energy of the laser is greater than 220 mJ, and the repetition frequency is 40 Hz, the finished laser with red copper fin radiator can meet the requirements of continuous operation, and the design allowance is about 15%. This thermal simulation method can match the actual situation well, and the research provides an effective reference for the further thermal design of the laser.
In order to solve the problem of heat dissipation of the air-cooled laser whose output energy was not less than 220 mJ and whose repetition rate was 40 Hz, a 3-D model of the laser and the heat sink was designed and constructed, and thermal simulation software was used to conduct a thermal simulation of the heat dissipation of the laser. The analysis results were optimized and verified by experiments. The results show that when the ambient temperature is 55 ℃, the output energy of the laser is greater than 220 mJ, and the repetition frequency is 40 Hz, the finished laser with red copper fin radiator can meet the requirements of continuous operation, and the design allowance is about 15%. This thermal simulation method can match the actual situation well, and the research provides an effective reference for the further thermal design of the laser.









2024,
48(2):
240-248.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.015
Abstract:
In order to compare the advantages and disadvantages of several 3-D reconstruction methods, an evaluation method was adoped for theoretical analysis and experimental verification. The wrapped phase error model of fringe noise interference was established, and the maximum variance of the wrapped phase error was obtained. Then the reliability of three classical dual-frequency phase unwrapping algorithms was analyzed and compared. The results show that the dual-frequency four-step phase-shifting algorithm 4fh+4fl has the strongest anti-interference ability, and its reconstructed object surface is smooth and wrinkle-free. The second is the 3fh+3fl algorithm, whose phase errors are 169.7% and 126.9% of those of 4fh+4fl. Finally, the 3fh+2fl algorithm has a large number of folds on the reconstructed shapes, and the measurement accuracy is the worst. The phase errors of the 3fh+2fl algorithm are 442.6% and 388.8% of those of the 4fh+4fl algorithm. However, compared with the 4fh+4fl algorithm and the 3fh+3fl algorithm, the measurement efficiency is improved by 37.5% and 16.6%. This study provides a method to evaluate the advantages and disadvantages of each dual-frequency phase shift method and provides a reference for the selection of the above three methods.
In order to compare the advantages and disadvantages of several 3-D reconstruction methods, an evaluation method was adoped for theoretical analysis and experimental verification. The wrapped phase error model of fringe noise interference was established, and the maximum variance of the wrapped phase error was obtained. Then the reliability of three classical dual-frequency phase unwrapping algorithms was analyzed and compared. The results show that the dual-frequency four-step phase-shifting algorithm 4fh+4fl has the strongest anti-interference ability, and its reconstructed object surface is smooth and wrinkle-free. The second is the 3fh+3fl algorithm, whose phase errors are 169.7% and 126.9% of those of 4fh+4fl. Finally, the 3fh+2fl algorithm has a large number of folds on the reconstructed shapes, and the measurement accuracy is the worst. The phase errors of the 3fh+2fl algorithm are 442.6% and 388.8% of those of the 4fh+4fl algorithm. However, compared with the 4fh+4fl algorithm and the 3fh+3fl algorithm, the measurement efficiency is improved by 37.5% and 16.6%. This study provides a method to evaluate the advantages and disadvantages of each dual-frequency phase shift method and provides a reference for the selection of the above three methods.







2024,
48(2):
249-254.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.016
Abstract:
In order to adapt to the development trend of lightweight and low-cost low earth orbit (LEO) satellites and meet the demand for rapid laser inter-satellite link establishment, a payload configuration method combining a rotatable laser payload and a fixed laser payload was adopted based on the analysis of inter-satellite laser configuration principles, used for inter-plane link establishment and intra-plane link establishment respectively. A fast inter-satellite link establishment method and process for laser payloads based on in-orbit star calibration, beacon light-assisted link establishment, and optical axis consistency design were introduced. In-orbit experimental data show that the inter-satellite laser payload link establishment time can be less than 30 s, which can achieve stable and continuous inter-satellite laser communication. The study is helpful for promoting the development and large-scale in-orbit application of inter-satellite laser communication.
In order to adapt to the development trend of lightweight and low-cost low earth orbit (LEO) satellites and meet the demand for rapid laser inter-satellite link establishment, a payload configuration method combining a rotatable laser payload and a fixed laser payload was adopted based on the analysis of inter-satellite laser configuration principles, used for inter-plane link establishment and intra-plane link establishment respectively. A fast inter-satellite link establishment method and process for laser payloads based on in-orbit star calibration, beacon light-assisted link establishment, and optical axis consistency design were introduced. In-orbit experimental data show that the inter-satellite laser payload link establishment time can be less than 30 s, which can achieve stable and continuous inter-satellite laser communication. The study is helpful for promoting the development and large-scale in-orbit application of inter-satellite laser communication.







2024,
48(2):
255-260.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.017
Abstract:
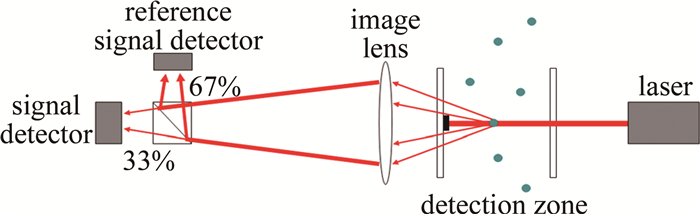
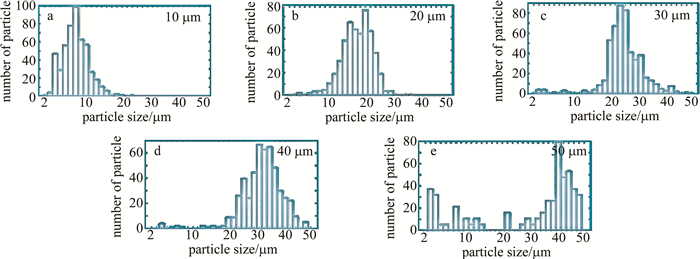
In order to improve the measurement accuracy of droplet particle size of domestic droplet spectrometer, standard particles were used to test the scattering response of the droplet spectrum, and the least mean square algorithm was used to invert the scattering response signal of the actually measured droplet spectrum. Through theoretical analysis and experimental verification, the particle size inversion data of the least mean square algorithm under different standard particle response signals were obtained. The results show that the inversion of standard particle distribution by the least mean square algorithm can reduce the distribution error of particle size so that the particles of different sizes can be accurately distinguished. The size distinction accuracy can reach 1 μm. This study provides a reference for improving the accuracy of the droplet spectrometer.
In order to improve the measurement accuracy of droplet particle size of domestic droplet spectrometer, standard particles were used to test the scattering response of the droplet spectrum, and the least mean square algorithm was used to invert the scattering response signal of the actually measured droplet spectrum. Through theoretical analysis and experimental verification, the particle size inversion data of the least mean square algorithm under different standard particle response signals were obtained. The results show that the inversion of standard particle distribution by the least mean square algorithm can reduce the distribution error of particle size so that the particles of different sizes can be accurately distinguished. The size distinction accuracy can reach 1 μm. This study provides a reference for improving the accuracy of the droplet spectrometer.







2024,
48(2):
261-267.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.018
Abstract:
In order to study the propagation characteristics of the polarization singularity based on the fractional vortex beam in free space, the method of numerical simulation was adopted, the theoretical analysis and data simulation were carried out, and the evolution of topology of polarization singularity based on the fractional circular Airy vortex beam was obtained during propagation in free space. The results show that regardless of whether there is a circular polarization singularity in the initial plane, the self-focusing properties of the polarization singularity based on the fractional circular Airy vortex beam will affect the topology of the light field during the propagation process, making the light field doesn't contain circular polarization singularities at the beginning of transmission, but after traveling through its self-focusing distance, several circular polarization singularities will appear in the light field. Compared with polarization singularities based on integer circular Airy vortex beams, both have singular topology self-recovery properties, while fractional-based vortex beams will bring more circular polarization singularities into the recovered light field point. This work will deepen the understanding of the propagation characteristics of polarization singularities, provide a theoretical basis for its application, and broaden the application range of circular Airy beams.
In order to study the propagation characteristics of the polarization singularity based on the fractional vortex beam in free space, the method of numerical simulation was adopted, the theoretical analysis and data simulation were carried out, and the evolution of topology of polarization singularity based on the fractional circular Airy vortex beam was obtained during propagation in free space. The results show that regardless of whether there is a circular polarization singularity in the initial plane, the self-focusing properties of the polarization singularity based on the fractional circular Airy vortex beam will affect the topology of the light field during the propagation process, making the light field doesn't contain circular polarization singularities at the beginning of transmission, but after traveling through its self-focusing distance, several circular polarization singularities will appear in the light field. Compared with polarization singularities based on integer circular Airy vortex beams, both have singular topology self-recovery properties, while fractional-based vortex beams will bring more circular polarization singularities into the recovered light field point. This work will deepen the understanding of the propagation characteristics of polarization singularities, provide a theoretical basis for its application, and broaden the application range of circular Airy beams.









2024,
48(2):
268-273.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.019
Abstract:
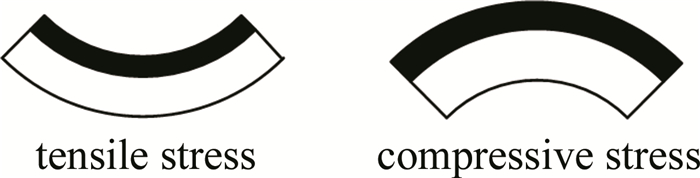
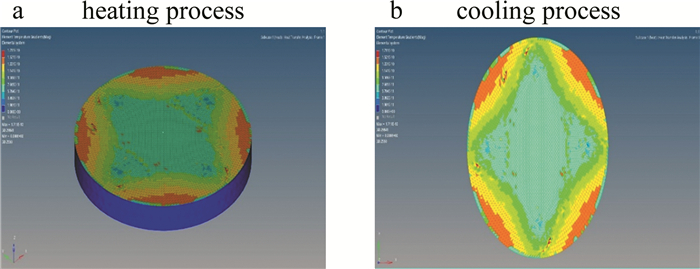
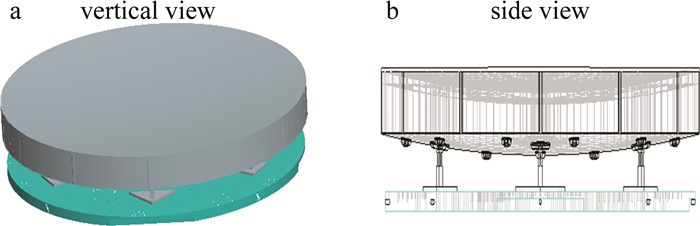
In order to fully understand the distribution law of thermal stress and gravity during the coating of a large aperture primary mirror, to control the shape change of the reflecting mirror, and improve the quality of film forming, the influence of thermal stress and gravity on the shape of reflecting mirror was theoretically analyzed and studied by finite element analysis method. The results show that the reflecting film of the large aperture primary mirror is more prone to spalling and damage near the edge. During the coating process of a large aperture primary mirror, the shape change of the reflecting mirror caused by its own gravity will have a great influence on the coating quality, and gravity elimination treatment is needed. When the main mirror of 3000 mm diameter is coated by evaporation film material up or down, the support mode needs to be optimized. This study provides a reference for controlling the influence of thermal stress and gravity on the shape of the reflecting mirror when coating a large mirror.
In order to fully understand the distribution law of thermal stress and gravity during the coating of a large aperture primary mirror, to control the shape change of the reflecting mirror, and improve the quality of film forming, the influence of thermal stress and gravity on the shape of reflecting mirror was theoretically analyzed and studied by finite element analysis method. The results show that the reflecting film of the large aperture primary mirror is more prone to spalling and damage near the edge. During the coating process of a large aperture primary mirror, the shape change of the reflecting mirror caused by its own gravity will have a great influence on the coating quality, and gravity elimination treatment is needed. When the main mirror of 3000 mm diameter is coated by evaporation film material up or down, the support mode needs to be optimized. This study provides a reference for controlling the influence of thermal stress and gravity on the shape of the reflecting mirror when coating a large mirror.













2024,
48(2):
274-280.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.020
Abstract:
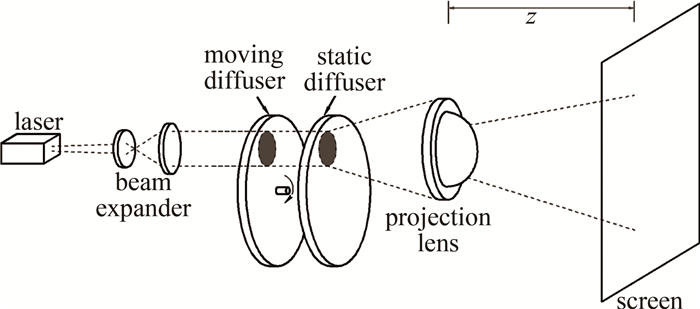
In order to effectively suppress speckles in laser projection display, a numerical expression of the optical fiber length and the optical field contrast degree at the end of the optical fiber was established based on speckle statistical theory. Based on the integral scattering statistics method, the effect of scattering and moving properties of the multiple scatter diffuser on speckle contrast was analyzed. The experimental results show that the laser speckle contrast ratio can reduce 3.76% by using the composite speckle suppression technology combining a vibrating 10 m multimode fiber with a rotating cascade diffuser. Using composite speckle suppression technique can increase the system's freedom, which contributes to speckle suppression. This study can provide a reference for the research work of composite speckle suppression technique in laser projection display.
In order to effectively suppress speckles in laser projection display, a numerical expression of the optical fiber length and the optical field contrast degree at the end of the optical fiber was established based on speckle statistical theory. Based on the integral scattering statistics method, the effect of scattering and moving properties of the multiple scatter diffuser on speckle contrast was analyzed. The experimental results show that the laser speckle contrast ratio can reduce 3.76% by using the composite speckle suppression technology combining a vibrating 10 m multimode fiber with a rotating cascade diffuser. Using composite speckle suppression technique can increase the system's freedom, which contributes to speckle suppression. This study can provide a reference for the research work of composite speckle suppression technique in laser projection display.




2024,
48(2):
281-287.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.021
Abstract:
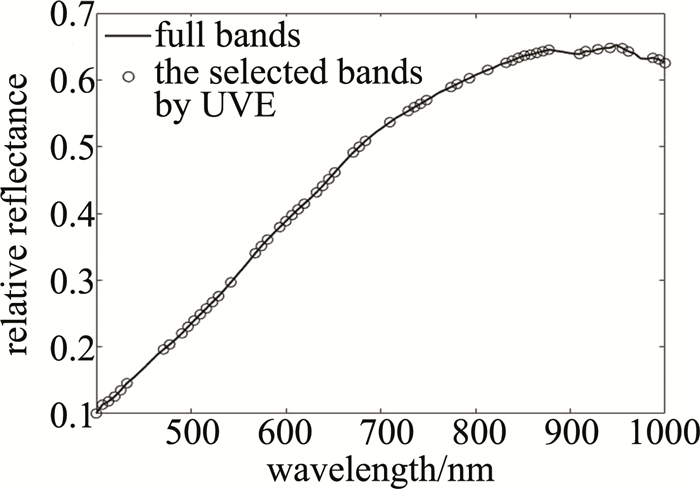
In order to solve the problem, the performance of the wheat seed purity detection model decreased due to sample imbalance and band information redundancy in the process of hyperspectral imaging. A seed purity hyperspectral detection model was proposed by combining the synthetic minority oversampling technique (SMOTE) with uninformative variables elimination (UVE) and support vector machine (SVM). In this model, the SMOTE was used to expand the minority class (impurity) samples of the wheat seeds to improve the sample imbalance. At the same time, the UVE was used to select the high-dimensional hyperspectral features, and the SVM model was constructed to further reduce the risk of model overfitting caused by feature redundancy. Results showed that: The average accuracy, precision, and negative sample detection rate of the five types of wheat seeds are 95.98%, 94.94%, and 89.32%, respectively, which are 3.89%, 7.18%, and 12.42% higher than the traditional methods, respectively. The proposed method has a good application prospect in the detection of wheat seed purity based on hyperspectral imaging technology.
In order to solve the problem, the performance of the wheat seed purity detection model decreased due to sample imbalance and band information redundancy in the process of hyperspectral imaging. A seed purity hyperspectral detection model was proposed by combining the synthetic minority oversampling technique (SMOTE) with uninformative variables elimination (UVE) and support vector machine (SVM). In this model, the SMOTE was used to expand the minority class (impurity) samples of the wheat seeds to improve the sample imbalance. At the same time, the UVE was used to select the high-dimensional hyperspectral features, and the SVM model was constructed to further reduce the risk of model overfitting caused by feature redundancy. Results showed that: The average accuracy, precision, and negative sample detection rate of the five types of wheat seeds are 95.98%, 94.94%, and 89.32%, respectively, which are 3.89%, 7.18%, and 12.42% higher than the traditional methods, respectively. The proposed method has a good application prospect in the detection of wheat seed purity based on hyperspectral imaging technology.



2024,
48(2):
288-294.
doi: 10.7510/jgjs.issn.1001-3806.2024.02.022
Abstract:
In order to use point cloud technology to better obtain surface information, the built-in optical lens of unmanned aerial vehicle(UAV) AA1300 was used to collect image data and build a 2-D digital orthophoto map (DOM) and GS-1350N lens was hung to collect a 3-D light detection and ranging point cloud. DOM classification was realized by three methods, namely, the k-nearest neighbor(KNN) method, support vector machine (SVM) method, and random forest (RF) method. 3-D point cloud was classified by the method with high accuracy in quantitative analysis. The comparative analysis of 2-D and 3-D classification mapping was carried out. The results show that, in 2-D DOM classification, kappa coefficients of RF are 3.74% and 2.16% higher, and the overall accuracy is 4.04% and 2.88% higher than those of KNN and SVM, respectively. The classification results of 2-D can be directly linearly transformed into 3-D point clouds, achieving 2-D and 3-D point cloud classification with a mapping accuracy of 94.15%. Under the same conditions, compared to 2-D/3-D point cloud mapping, direct 3-D point cloud classification can present more complete terrain information. This study indicates that the precise classification of 3-D point clouds can be helpful for better obtaining surface information.
In order to use point cloud technology to better obtain surface information, the built-in optical lens of unmanned aerial vehicle(UAV) AA1300 was used to collect image data and build a 2-D digital orthophoto map (DOM) and GS-1350N lens was hung to collect a 3-D light detection and ranging point cloud. DOM classification was realized by three methods, namely, the k-nearest neighbor(KNN) method, support vector machine (SVM) method, and random forest (RF) method. 3-D point cloud was classified by the method with high accuracy in quantitative analysis. The comparative analysis of 2-D and 3-D classification mapping was carried out. The results show that, in 2-D DOM classification, kappa coefficients of RF are 3.74% and 2.16% higher, and the overall accuracy is 4.04% and 2.88% higher than those of KNN and SVM, respectively. The classification results of 2-D can be directly linearly transformed into 3-D point clouds, achieving 2-D and 3-D point cloud classification with a mapping accuracy of 94.15%. Under the same conditions, compared to 2-D/3-D point cloud mapping, direct 3-D point cloud classification can present more complete terrain information. This study indicates that the precise classification of 3-D point clouds can be helpful for better obtaining surface information.








