 网站地图
网站地图






-
建设现代农业是新时代产业兴旺的5个重要领域之一。利用无人机(unmanned aerial vehicle,UAV)遥感技术快速准确地分类提取高原山区乡村的土地覆盖信息, 对当地的发展建设具有重要的战略意义。ROSSI等人[1]在意大利的Ricasoli村,用无人机采集的影像构建数字地形模型(digital terrain model,DTM) 对当地的滑坡进行监测,并评估相关面积和体积。KOUTALAKIS等人[2]应用DJI Mavic 2 Pro采集希腊北部Nea Zichni村的影像,通过构建数字正射影像地图(digital orthophoto map, DOM)和数字表面模型(digital surface model, DSM)估算村子周围的滑坡体面积和体积等形态参数。LI等人[3]通过无人机获取的高精度照片进行处理,经多尺度分割方法提取道路信息,给予乡村道路安全引导一定的参考。CHEN等人[4]在江西省某村利用Pix4DMapper解算大疆Phantom 4 Pro无人机采集的影像数据,制作了规划区内的DOM和DSM规划模型等成果,助力秀美乡村建设。而对于UAV相关产品的分类,GUO等人[5]为精准获取树木空间分布,通过无人机采集影像构建高分辨率的数字高程模型(digital elevation model,DEM),并结合影像光谱和纹理信息,基于机器学习的方法分类出所需树木的空间分布,结果表明:该方法适用于大部分的树种空间分布信息的提取。MA等人[6]为高效准确地获取农村用地的分类信息,采用面向对象的方法结合光谱、几何特征,对高精度UAV影像进行多尺度分割分类的方式采集农村地类信息,结果表明: 建筑物、耕地和植被的分类精度相对降低,其余地类生产和用户精度均高于90%。HAN等人[7]基于UAV遥感技术的探索在灌溉区分类有效性,把构建的高分辨率DOM通过机器学习的方式完成分类, 结果表明:支持向量机法(support vector machine,SVM)相对于k最近邻法(k-nearest neighbor,KNN)更能准确提取各地物的特征。LIU等人[8]为探究适合于无人机遥感高分辨率影像,在农耕区应用机器学习分类算法,基于Boruta特征选择优化数据集,结果表明:对象具有类似的光谱、纹理特征时,较易造成错分类和漏分类,随机森林(random forest,RF)算法相对而言总体分类精度最高,达到98.19%,更适宜处理类似的数据集。
结合诸多学者的研究可知,RF算法的应用主要集中在2-D的影像分类。相比之下,3-D的点云数据在表现地物与地面的真实情况有较强的鲁棒性。为了更好地服务于乡村振兴战略,本文作者准备以AA1300多旋翼BB4大黄蜂无人机采集的影像照片构建高精度的DOM,再将2-D/3-D映射的点云分类与3-D点云的直接分类做对比分析,以更好地评定地类地物在3-D场景下的覆盖与利用。
-
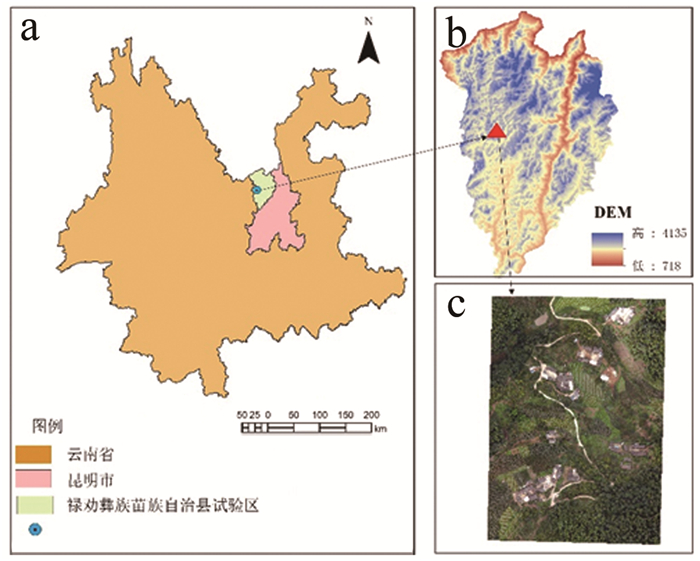
试验区位于云南省昆明市某乡的云龙水库,如图 1所示。该水库是昆明市最大的集中式饮用水源地,昆明市将近70%的水是云龙水库供给,年均向主城供水1.6×108 m3~1.8×108 m3。县行政区地处滇中北部,位于东经102°14′~102°56′、北纬25°25′~26°22′之间, 版图状如梨叶,东西窄、南北长,如图 1a所示。该县境内地势东北高、西南低,自东北向西南呈阶梯状缓降,如图 1b所示。试验区在崇山峻岭之间,依次分布着相对平缓的台地和冲积带,称“坝子”,是经济作物、粮食和其它农作物的主要产区,如图 1c所示。
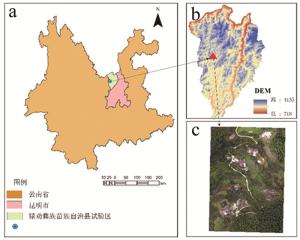
图 1 试验区概况
Figure 1. Overview of the experimental area
-
试验区影像数据通过AA1300多旋翼BB4大黄蜂无人机由内置4240万像素的光学相机进行影像数据采集。考虑到试验区的地理情况, 进行相应的航线规划,再依据后期的数据质量要求,设置合适的航向、旁向重叠度及飞行高度。由于该飞行器可搭载多个镜头,故在相同的飞行环境下,通过GS-1350N镜头采集激光雷达(light detection and ranging,LiDAR)点云。相关飞行器、光学相机和镜头的参数如下:BB4大黄蜂无人机的最大起飞重量为28 kg,最大平飞速率为14 m/s,最大爬升速率为5 m/s,抗风能力为6级;光学相机传感器为互补金属氧化物半导体类型。镜头焦距为21 mm,像素为4240万,分辨率为7953×5340;激光雷达镜头为GS-1350N,最大测程为1350 m,反射率大于80%,扫描角度为75°~90°,采集频率为820 kHz。
-
DOM具有几何、纹理和光谱等信息,能直观解译试验区的俯瞰情况。先根据有无遮挡或色彩不均匀的情况把采集的影像数据进行预处理,再构建DOM,流程如图 2所示。基于全数字化平台,仅完成影像定位姿态系统(position and orientation system, POS)数据自动转点、外方位元素解算以及数字微分纠正等步骤。最终的DOM像素为3414 pixel×4842 pixel,分辨率为0.1 m。
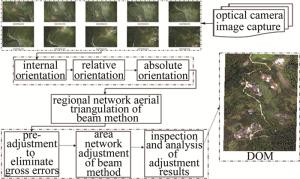
图 2 DOM构建流程
Figure 2. Building process of DOM
机载LiDAR点云有较强穿透烟、雾、灰尘颗粒的能力,同时采集的3-D点云数据可保持尺度不变性,在复杂地貌场景中可完整地表达复杂地物的几何形状,同时能够准确展现地物间的布局关系,可有效避免2-D影像中存在的光照影响、姿态转换等情况[9]。无人机LiDAR点云具有以下几个特点:相对于地面站3-D激光扫描仪设备更高效和操作简洁;包含3-D坐标信息和扫描射线信息;具备回波强度及回波次数信息,可直接透过植被、建筑等地物采集地面数据;缺乏实景色彩信息,采集数据时在低空中易产生噪声点。
-
随着社会的发展及科技的进步,遥感影像分类精度逐步提高,诸如贝叶斯法(Bayes)[10]、决策树法(decision tree,DT)[11]、KNN[12-13]、SVM[14-15]和RF[16-17]等精细化分类遥感影像算法成为近来研究的重点方向。
-
KNN分类算法的主要概念是指在特征空间中有若干样本,将最近邻样本中的绝大部分数值归类为某一类别,即样本同属该类别,且具备相同特性。在进行分类决策时,KNN算法采用欧氏距离来度量样本在特征空间中的近邻性。对于k值的确定,一般都是采用尝试验证的方式,即在调整k值时,精度按升序或降序排列选取最大值从而确定最适宜的k值[18-19]。
-
SVM以统计学中的一致性和结构风险最小化的思想为基础,将学习样本以非线性到高维核函数空间。然后在高维特征空间中构建最优超平面,构造和使用不同的核函数。SVM算法在构建判别函数时对向量求点积,并通过非线性变换到高维特征空间中的内积进行解算。而在SVM分类算法中惩罚系数C,即对误差的宽容度,是主要调整参数。C值过大, 容易导致过拟合线性,反之则会出现欠拟合[20]。
-
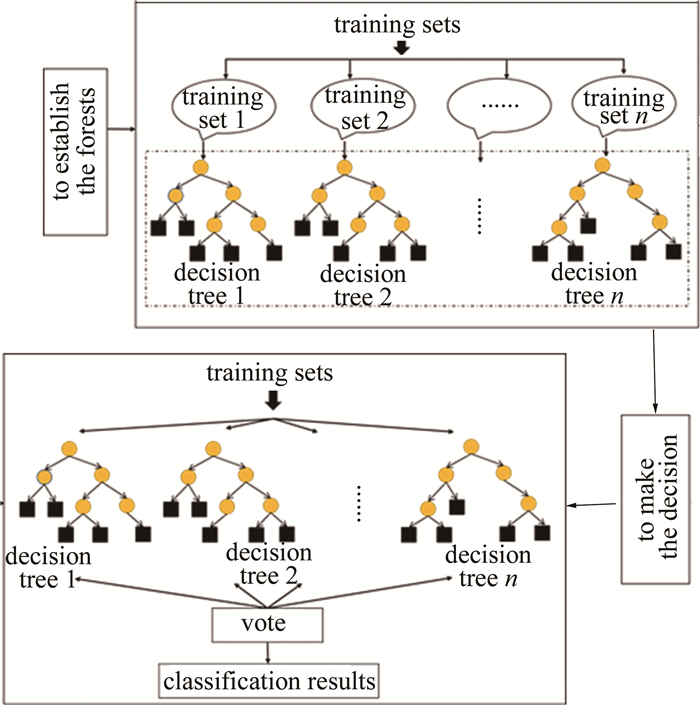
RF分类算法是影像分类中的重要方法[21-23]。RF算法的过程主要包含训练集的产生、构建决策树和算法的执行,如图 3所示。

图 3 随机森林分类算法
Figure 3. RF classification algorithm
对规模是n的森林而言,需要N颗决策树产生相同数量的训练集。采用多个分类器集中训练的集成学习方法,随机抽取用于训练的样本,该流程存在少许样本抽取重复的问题。在RF中采用分类与回归树(classification and regression tree, CART) 作为分类器,其中训练过程需要计算每个属性的Gini指标[24-26],通过选择最小Gini指标对节点进行分类,依据递归的形式建立决策树,按Gini不纯度最小准则,则分裂节点G(t)的计算过程如下:
$ G(t)=1-\sum\limits_{j=1}^c[p(j \mid t)]^2, (j=1, \cdots, c) $
(1) 式中: p(j|t)表示t节点上类别为取j的概率,若节点t的全部样本属于同类时,G(·)指数取最小值,表示样本最纯;若节点t的均不属于同类时, G(·)指数为最大值1。
若将样本划分为m个分支,则分裂节点的Gini指数按下式来计算:
$ G(x) = \sum\limits_{i = 1}^m {\frac{{{n_i}}}{n}} G(i) $
(2) 式中: m为节点数量; ni表示i节点的样本数量;n代表上层节点的样本数量。
RF算法是综合考虑多个决策树而形成的一种集成分类器模型,它不仅用于分类, 还可以解决回归问题,其投票决策过程如下:
$ H(x) = \mathop {{\mathop{\rm argmax}\nolimits} }\limits_Y \sum\limits_{i = 1}^K I \left( {{h_i}(x) = Y} \right) $
(3) 式中: H(x)为组合分类模型;I(·)是指示性函数,依据最大投票法则判断得票数最多的一类作为输出结果;hi(x)为单棵决策树;Y是输出变量。
上述机器学习分类算法的分类结果精度以定量评价,即依据N×N的混淆矩阵,用矩阵做分类误差分析。由下式得到分类的生产者精度(producer accuracy, PA),表示样本与分类结果相符合的概率:
$ A_{\mathrm{PA}}=\frac{a_{i i}}{a_{t i}} \times 100 \% $
(4) 由下式得到用户精度(user accuracy, UA),表示分类结果中随机样本和所属类别的比值:
$ A_{\mathrm{UA}}=\frac{a_{i i}}{a_{i t}} \times 100 \% $
(5) 由下式得到全局精度(overall accuracy, OA),是样本数中分类正确的数量与总量的比值:
$ {A_{{\rm{OA}}}} = \frac{{\sum\limits_{i = 1}^n {{x_{ii}}} }}{N} \times 100\% $
(6) kappa系数κ表示分类影像图和参考分类图对比相符合程度,其值在范围[0,1],越靠近1表示分类的精度越高[26]:
$ \kappa = \frac{{N\sum\limits_{i = 1}^n {{a_{ii}}} - \sum\limits_{i = 1}^n {\left( {{a_{ti}} + {a_{it}}} \right)} }}{{{N^2} - \sum\limits_{i = 1}^n {\left( {{a_{ti}} + {a_{it}}} \right)} }} $
(7) 式中: aii是i类中分类属正确的数目;ati是全部i类的样本总数;ait表示在分类结果中i类别的总数目;xii代表全部样本里所分类准确的数;N为样本集的总数。
-
为实现乡村建设,利用UAV遥感技术快速、准确地分类提取高原山区乡村的土地覆盖信息。基于某影像分析软件进行多尺度分割,先由尺度10开始分割,结果如图 4a所示,目视解译为“过分割”状态, 再按步长为10调试适宜本次试验的分割尺度,最后的尺度是200,结果如图 4b所示,可判断该分割结果属“欠分割”状态,再不断调试分割尺度,最终确定尺度70的分割结果,如图 4c所示,总计得到1198个面状像元能较好地满足本次在高原山村的分类所需的试验要求。
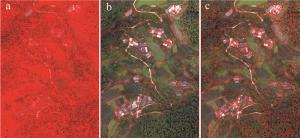
图 4 最适宜分割结果
Figure 4. Optimal segmentation results
通过目视解译出试验区的地类,包含裸土、道路、房屋、农作物和树木5类,同时依据最适宜本次试验的分割结果,在样本选择工具中选取适宜的样本信息,选取的5类样本信息布满整个试验区,截屏如图 5所示。其中树木样本选取80个,是样本数量最多的地类,而裸土样本选取最少,样本数量为19个,考虑试验区的地类占比情况,农作物选取样本33个。

图 5 地类样本点选取
Figure 5. Selection of ground class sample points
依据选择的5类样本,同时加入亮度、红、绿、蓝3种可见光谱的均值特征及可见光波段差异植被指数V, 按式(8)计算,取值范围是[-1,1]。对所有的影像分割对象进行训练,其中需要对决策树的数量、最大深度、最大特征数等参数进行调整。
$ V=(2 G-R-B) /(2 G+R+B) $
(8) 式中: G表示绿波段的均值特征; R表示红波段的均值特征; B表示蓝波段的均值特征。
基于某影像分析软件进行DOM的机器学习分类,KNN、SVM和RF算法都以试错法确定关键系数,其中确定KNN中的k=2,SVM中的惩罚系数C=2,而RF算法单棵树的最大深度为2,每个节点需要的最小样本数为1,树的数目为25, 具体分类结果如图 6所示。把3类算法的结果按同色号展示,以目视解译分析3种算法的分类结果。可以发现, KNN的分类中部分农作物和树木分类效果不佳,两地类有部分混淆,且有部分房屋被误识别为道路,如图 6a所示。图 6b所示为SVM分类,主要是右下角有较大面积树木被误识别为农作物。而在RF分类中,虽有部分房屋被误识别为道路,但整体分类较为完整,具体如图 6c所示。

图 6 DOM分类结果
Figure 6. DOM classification results
选择完合适的样本数据集,然后按式(4)~式(7)统计3类算法基于裸土、道路、房屋、树木和农作物的19、18、23、80和33个样本的误差矩阵。如表 1所示,KNN分类的OA达到87.86%, κ=82.93%;SVM分类的OA达到89.02%, κ=84.51%;而在RF分类的结果与样本比较中,树木有2个样本被误识别为农作物,农作物样本中有5个样本被误识为树木, RF分类算法在本次试验中OA达到91.90%, κ=86.67%。κ的值越接近100%表示分类的精度高,κ分别比另外两种分类方法高3.74%和2.16%,且OA比KNN高了4.04%,比SVM提升2.88%,故本次试验中RF分类效果显著。
表 1 3种算法2-D影像分类精度
Table 1. 2-D image classification accuracy of three algorithms
methods ground objects bare soil road building tree crop total KNN bare soil 16 2 0 0 0 18 road 2 16 6 0 0 24 building 0 0 17 0 0 17 tree 1 0 0 74 4 79 crop 0 0 0 6 29 35 total 19 18 23 80 33 producer 0.8421 0.8889 0.7391 0.9250 0.8788 user 0.8889 0.6667 1 0.9367 0.8286 OA 0.8786 κ 0.8293 SVM bare soil 15 2 0 0 0 17 road 2 16 5 0 0 23 building 0 0 18 0 0 18 tree 2 0 0 75 3 80 crop 0 0 0 5 30 35 total 19 18 23 80 33 producer 0.7895 0.8889 0.7826 0.9375 0.909 user 0.8824 0.6957 1 0.9375 0.8571 OA 0.8902 κ 0.8451 RF bare soil 17 2 0 0 0 19 road 2 16 3 0 0 21 building 0 0 20 0 0 20 tree 0 0 0 75 2 77 crop 0 0 0 5 31 36 total 19 18 23 80 33 producer 0.8947 0.8888 0.8695 0.9375 0.9393 user 0.8947 0.7620 1 0.9740 0.8611 OA 0.9190 κ 0.8667 -
RF分类方法在山区村落的DOM影像定性分析中,比本次试验的其余两种机器学习算法有更高的精度保障。故LiDAR点云选择以RF算法进行分类,再对RF分类结果对比分析。先需把DOM影像的不同地物分类结果映射到LiDAR点云中。由于影像和LiDAR点云是在相同飞行器、航线、坐标系下采集,故仅需通过直接求解法映射分类结果。在此过程中,会存在部分映射误差,需要按下式进行映射的精度评价:
$ T=\frac{q}{Q} \times 100 \% $
(9) 式中: Q表示2-D影像不同地物分类的面状总数量;q为映射到3-D点云中不同地物分类的面状数量。
把DOM的分类结果映射到LiDAR点云中实现2-D-3-D分类映射,结果如图 7所示。统计地类共1198像元,实际映射1128像元,按式(10)定量计算可知, 本次映射准确性达94.15%。
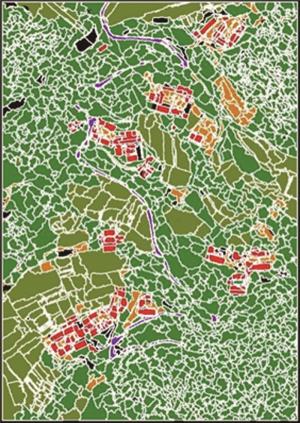
图 7 2-D-3-D映射
Figure 7. 2-D-3-D mapping
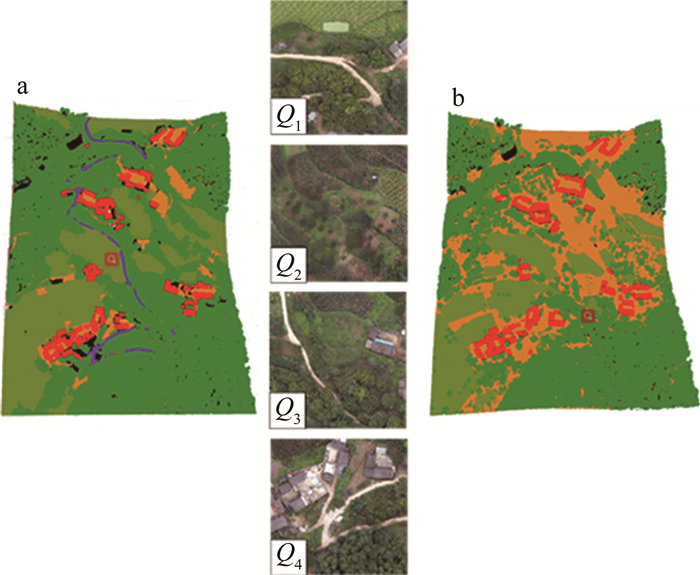
把同样的样本数据分别分割出对应LiDAR点云地类,并以此为点云的训练样本,在LiDAR360中实现RF的点云3-D分类,图 8a为DOM至LiDAR点云的2-D/3-D分类映射结果; 图 8b为3-D点云的分类结果,赋予5种地类相同颜色。
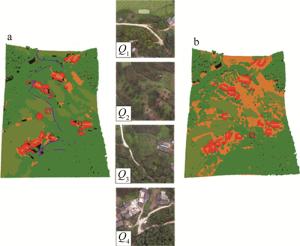
图 8 2-D/3-D和3-D分类对比
Figure 8. Comparison of 2-D/3-D and 3-D classification
对于试验区全部地类,由2-D/3-D映射的分类出点云所属类别相对更符合实际地类,特别是3-D点云分类在Q1和Q2区域均把大面积的农作物分类为裸土。同样在Q3区域中, 道路同样被误分类为裸土,但由于光学影像不具备穿透地物获取实际地面信息的能力,因道路两旁的部分树木高大且树叶茂密,树冠面积在无人机所拍摄的影像中遮挡了实际道路信息,由此导致2-D/3-D映射的点云分类出的道路信息存在残缺。此外,在Q4区域,3-D点云分类出的房屋信息相对立体,房屋围绕的院子未出现信息缺失的情况。总体而言,3-D点云分类除水体区域不能扫描出点云而导致有空洞外,也因试验区属于高原山区村落,存在一定的高程差,导致部分低矮的农作物和道路被误分类为裸土信息。但3-D的直接点云分类树木更完整呈现地物信息,且不易造成阴影压盖地表数据的现象。
-
利用UAV遥感技术快速、准确地分类提取高原山区乡村的土地覆盖信息, 可以拓展UAV在乡村发展中的应用。本次试验中通过AA1300多旋翼BB4大黄蜂无人机由内置4240万像素的光学相机采集影像数据,并应用数字化流程构建2-D高分辨率DOM,在同等飞行条件下又通过GS-1350N采集LiDAR点云。
(a) DOM分类中,RF分类算法的OA达到91.90%, kappa系数κ=86.67%。相对于KNN和SVM分类方法,OA分别提高了4.04%和2.88%,κ分别比两种分类方法高3.74%和2.16%。
(b) 2-D的分类结果通过直接线性变换到3-D点云中,实现2-D/3-D的点云分类,映射精度达94.15%,但存在一定的误差。
(c) 基于相同的样本试验3-D点云直接分类法,与2-D/3-D点云映射的结果相比,3-D点云直接分类可以更好地丰富树木、建筑物等地物的高程信息,且不会因地物遮挡而造成地表数据损失的情况,但仍存在问题:因扫描射线不可获取水体的信息而造成有空洞,另外由于实地的高程差,导致低矮的农作物和道路被误识别为裸土。
在高原山区实现3-D的点云精准分类是后续的研究计划。
机器学习参与山区村落影像点云分类的研究
Study on image point cloud classification of mountain villages by machine learning
-
摘要: 为了利用点云技术更好地获取地表信息, 用无人机AA1300的内置光学镜头采集影像数据, 构建2-D的数字正射影像地图(DOM), 悬挂GS-1350N镜头采集3-D的激光雷达点云; 通过k最近邻法(KNN)、支持向量机法(SVM)和随机森林法(RF)来实现DOM分类, 用定量分析中精度高的方法分类3-D点云, 并进行了2-D和3-D的分类映射对比分析。结果表明, 2-D的DOM分类中, 相对于KNN和SVM, RF的kappa系数分别高3.74%和2.16%, 全局精度分别高4.04% 和2.88%;2-D的分类结果通过直接线性变换到3-D点云中, 可实现2-D和3-D的点云分类, 映射精度达94.15%;而在相同条件下, 相对于2-D/3-D点云映射, 直接3-D点云分类能更完整地呈现地物信息。3-D点云的精准分类对获取地表信息是有帮助的。Abstract: In order to use point cloud technology to better obtain surface information, the built-in optical lens of unmanned aerial vehicle(UAV) AA1300 was used to collect image data and build a 2-D digital orthophoto map (DOM) and GS-1350N lens was hung to collect a 3-D light detection and ranging point cloud. DOM classification was realized by three methods, namely, the k-nearest neighbor(KNN) method, support vector machine (SVM) method, and random forest (RF) method. 3-D point cloud was classified by the method with high accuracy in quantitative analysis. The comparative analysis of 2-D and 3-D classification mapping was carried out. The results show that, in 2-D DOM classification, kappa coefficients of RF are 3.74% and 2.16% higher, and the overall accuracy is 4.04% and 2.88% higher than those of KNN and SVM, respectively. The classification results of 2-D can be directly linearly transformed into 3-D point clouds, achieving 2-D and 3-D point cloud classification with a mapping accuracy of 94.15%. Under the same conditions, compared to 2-D/3-D point cloud mapping, direct 3-D point cloud classification can present more complete terrain information. This study indicates that the precise classification of 3-D point clouds can be helpful for better obtaining surface information.
-
表 1 3种算法2-D影像分类精度
Table 1. 2-D image classification accuracy of three algorithms
methods ground objects bare soil road building tree crop total KNN bare soil 16 2 0 0 0 18 road 2 16 6 0 0 24 building 0 0 17 0 0 17 tree 1 0 0 74 4 79 crop 0 0 0 6 29 35 total 19 18 23 80 33 producer 0.8421 0.8889 0.7391 0.9250 0.8788 user 0.8889 0.6667 1 0.9367 0.8286 OA 0.8786 κ 0.8293 SVM bare soil 15 2 0 0 0 17 road 2 16 5 0 0 23 building 0 0 18 0 0 18 tree 2 0 0 75 3 80 crop 0 0 0 5 30 35 total 19 18 23 80 33 producer 0.7895 0.8889 0.7826 0.9375 0.909 user 0.8824 0.6957 1 0.9375 0.8571 OA 0.8902 κ 0.8451 RF bare soil 17 2 0 0 0 19 road 2 16 3 0 0 21 building 0 0 20 0 0 20 tree 0 0 0 75 2 77 crop 0 0 0 5 31 36 total 19 18 23 80 33 producer 0.8947 0.8888 0.8695 0.9375 0.9393 user 0.8947 0.7620 1 0.9740 0.8611 OA 0.9190 κ 0.8667  下载: 导出CSV
下载: 导出CSV
-
[1] ROSSI G, TANTERI L, TOFANI V, et al. Multitemporal UAV surveys for landslide mapping and characterization[J]. Landslides, 2018, 15(5): 1045-1052. doi: 10.1007/s10346-018-0978-0 [2] KOUTALAKIS P D, TZORAKI O A, PRAZIOUTIS G I, et al. Can drones map earth cracks? Landslide measurements in north greece using UAV photogrammetry for nature-based solutions[J]. Sustainability, 2021, 13(9): 4697-4717. doi: 10.3390/su13094697 [3] 李旭亮, 王保成, 田亮, 等. 基于无人机影像的乡村道路信息提取及安全导引优化设计[J]. 导航定位学报, 2021, 9(4): 123-130. LI X L, WANG B Ch, TIAN L, et al. Information extraction of rural roads and optimization design of safety guidance based on UAV images[J]. Journal of Navigation and Positioning, 2021, 9(4): 123-130 (in Chinese). [4] 陈竹安, 施陈敬, 冯祥瑞, 等. 低空多旋翼无人机航测在秀美乡村规划建设中的应用[J]. 测绘通报, 2019(8): 144-148. CHEN Zh A, SHI Ch J, FENG X R, et al. Application of aerial survey of low-altitude multi-rotor UAV in beautiful rural planning and construction[J]. Bulletin of Surveying and Mapping, 2019(8): 144-148(in Chinese). [5] GUO Q, ZHANG J, GUO S, et al. Urban tree classification based on object-oriented approach and random forest algorithm using unmanned aerial vehicle (UAV) multispectral imagery[J]. Remote Sensing, 2022, 14(16): 3885-3902. doi: 10.3390/rs14163885 [6] 马飞虎, 徐发东, 孙翠羽. 面向对象的无人机影像地物分类[J]. 应用科学学报, 2021, 39(2): 312-320. MA F H, XU F D, SUN C Y. Land-use information of object-oriented classification by UAV image[J]. Journal of Applied Sciences, 2021, 39(2): 312-320(in Chinese). [7] 韩文霆, 郭聪聪, 张立元, 等. 基于无人机遥感的灌区土地利用与覆被分类方法[J]. 农业机械学报, 2016, 47(11): 270-277. HAN W T, GUO C C, ZHANG L Y, et al. Classification method of land cover and irrigated farm land use based on UAV remote sensing in irrigation[J]. Transactions of the Chinese Society of Agricultural Machinery, 2016, 47(11): 270-277(in Chinese). [8] 刘舒, 朱航. 基于超高空间分辩率无人机影像的面向对象土地利用分类方法[J]. 农业工程学报, 2020, 36(2): 87-94. LIU Sh, ZHU H. Object-oriented land use classification based on ultra-high resolution images taken by unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(2): 87-94(in Chinese). [9] 郝雯, 张雯静, 梁玮, 等. 面向三维点云的场景识别方法综述[J]. 光学精密工程, 2022, 30(16): 1988-2005. HAO W, ZHANG W J, LIANG W, et al. Scene recognition for 3D point clouds: A review[J]. Optics and Precision Engineering, 2022, 30(16): 1988-2005(in Chinese). [10] 田晨, 张金龙, 金义蓉, 等. 一种利用贝叶斯优化的蓝藻遥感分类方法[J]. 自然资源遥感, 2023, 35(1): 49-56. TIAN Ch, ZHANG J L, JIN Y R, et al. A remote sensing classification method for cyanobacteria using Bayesian optimization algorithm[J]. Remote Sensing for Natural Resources, 2023, 35(1): 49-56(in Chinese). [11] 刘睿, 王志勇, 高瑞. 时序SAR影像的干旱地区土地利用分类应用[J]. 测绘科学, 2021, 46(10): 90-97. LIU R, WANG Zh Y, GAO R. Application of time series SAR i-mage in land use classification in arid area[J]. Science of Surveying and Mapping, 2021, 46(10): 90-97(in Chinese). [12] 颜文杰, 陈俊明, 宋亚军, 等. 基于DT-KNN-FDA建模的车漆光谱无损鉴别[J]. 激光技术, 2021, 45(2): 182-185. YAN W J, CHEN J M, SONG Y J, et al. Research on non-destructive identification about vehicle paints by DT-KNN-FDA[J]. Laser Technology, 2021, 45(2): 182-185(in Chinese). [13] 涂兵, 张晓飞, 张国云, 等. 递归滤波与KNN的高光谱遥感图像分类方法[J]. 国土资源遥感, 2019, 31(1): 22-32. TU B, ZHANG X F, ZHANG G Y, et al. Hyperspectral image cla-ssification via recursive filtering and KNN[J]. Remote Sensing for Land & Resources, 2019, 31(1): 22-32(in Chinese). [14] 赵庆展, 江萍, 王学文, 等. 基于无人机高光谱遥感影像的防护林树种分类[J]. 农业机械学报, 2021, 52(11): 190-199. ZHAO Q Zh, JIANG P, WANG X W, et al. Classification of protection forest tree species based on UAV hyperspectral data[J]. Transactions of the Chinese Society of Agricultural Machinery, 2021, 52(11): 190-199(in Chinese). [15] 邓曾, 李丹, 柯樱海, 等. 基于改进SVM算法的高分辨率遥感影像分类[J]. 国土资源遥感, 2016, 28(3): 12-18. DENG Z, LI D, KE Y H, et al. An improved SVM algorithm for high spatial resolution remote sensing image classification[J]. Remote Sensing for Land & Resources, 2016, 28(3): 12-18(in Ch-inese). [16] 刘海娟, 张婷, 侍昊, 等. 基于RF模型的高分辨率遥感影像分类评价[J]. 南京林业大学学报(自然科学版), 2015, 39(1): 99-103. LIU H J, ZHANG T, SHI H, et al. Classification evaluation on high resolution remote sensing image based on RF[J]. Journal of Nanjing Forestry University (Natural Sciences Edition), 2015, 39(1): 99-103(in Chinese). [17] WANG X, GAO X, ZHANG Y, et al. Land-cover classification of coastal wetlands using the RF algorithm for worldview-2 and landsat 8 images[J]. Remote Sensing, 2019, 11(16): 1927-1949. doi: 10.3390/rs11161927 [18] DENG Z, ZHU X, CHENG D, et al. Efficient KNN classification algorithm for big data[J]. Neurocomputing, 2016, 195: 143-148. doi: 10.1016/j.neucom.2015.08.112 [19] 潘卫军, 吴郑源, 张晓磊. 基于k最近邻的激光雷达飞机尾涡识别[J]. 激光技术, 2020, 44(4): 471-477. PANG W J, WU Zh Y, ZHANG X L. Identification of aircraft wake vortex based on k-nearest neighbor[J]. Laser Technology, 2020, 44(4): 471-477 (in Chinese). [20] 赵理君, 唐娉. 典型遥感数据分类方法的适用性分析——以遥感图像场景分类为例[J]. 遥感学报, 2016, 20(2): 157-171. ZHAO L J, TANG P. Scalability analysis of typical remote sensing data classification methods: A case of remote sensing image scene[J]. Journal of Remote Sensing, 2016, 20(2): 157-171(in Chin-ese). [21] 王猛, 张新长, 王家耀, 等. 结合随机森林面向对象的森林资源分类[J]. 测绘学报, 2020, 49(2): 235-244(in Chinese). WANG M, ZHANG X Ch, WANG J Y, et al. Forest resource cla-ssification based on random forest and object oriented method[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(2): 235-244(in Chinese). [22] 刘国栋, 刘佳, 刘浪. 一种基于机载LiDAR数据的山区道路提取方法[J]. 激光技术, 2022, 46(4): 466-473. LIU G D, LIU J, LIU L. A mountain road extraction method based on airborne LiDAR data[J]. Laser Technology, 2022, 46(4): 466-473(in Chinese). [23] 薛豆豆, 程英蕾, 释小松, 等. 综合布料滤波与改进随机森林的点云分类算法[J]. 激光与光电子学进展, 2020, 57(22): 221017. XUE D D, CHENG Y L, SHI X S, et al. Point clouds classification algorithm based on cloth filtering algorithm and improved random forest[J]. Laser & Optoelectronics Progress, 2020, 57(22): 221017(in Chinese). [24] 吴锦玉, 刘晓龙, 柏延臣, 等. 基于GF-2数据结合多纹理特征的塑料大棚识别[J]. 农业工程学报, 2019, 35(12): 173-183. WU J Y, LIU X L, BO Y Ch, et al. Plastic greenhouse recognition based on GF-2 data and multi-texture features[J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(12): 173-183(in Chinese). [25] 高永刚, 林悦欢, 温小乐, 等. 基于无人机影像的可见光波段植被信息识别[J]. 农业工程学报, 2020, 36(3): 178-189. GAO Y G, LIN Y H, WEN X L, et al. Vegetation information re-cognition in visible band based on UAV images[J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(3): 178-189 (in Chinese). [26] 张莹, 黄影平, 郭志阳, 等. 基于点云与图像交叉融合的道路分割方法[J]. 光电工程, 2021, 48(12): 210340. ZHANG Y, HUANG Y P, GUO Zh Y, et al. Point cloud-image data fusion for road segmentation[J]. Opto-Electron Engineering, 2021, 48(12): 210340(in Chinese). -

 点击查看大图
点击查看大图
图(8) / 表(1)
计量
- 文章访问数: 1153
- HTML全文浏览量: 747
- PDF下载量: 7
- 被引次数: 0
