 网站地图
网站地图

 微信公众平台
微信公众平台 Email alert
Email alert RSS
RSS当期目录
显示方式:
 [摘要]
[摘要] [PDF 263KB]
[PDF 263KB]
2024,
48(4):
455-462. doi: 10.7510/jgjs.issn.1001-3806.2024.04.001
 [HTML全文]
[HTML全文]
摘要:
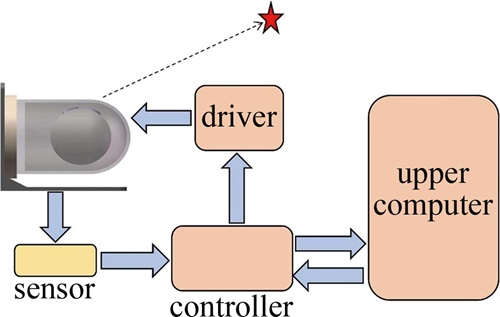
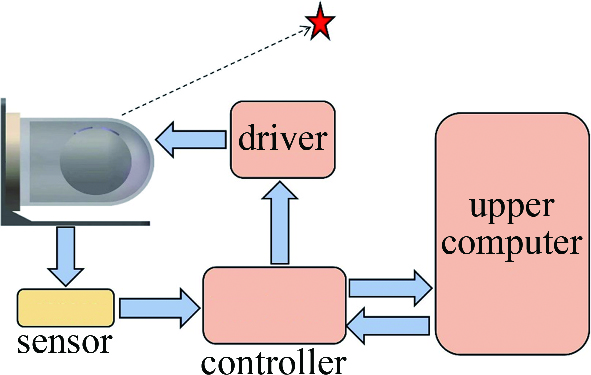
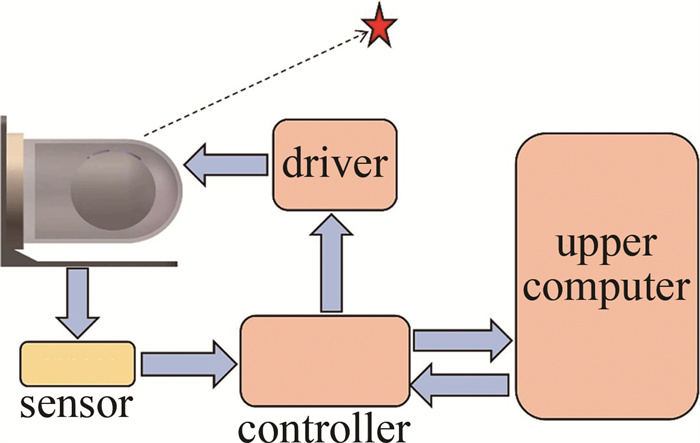
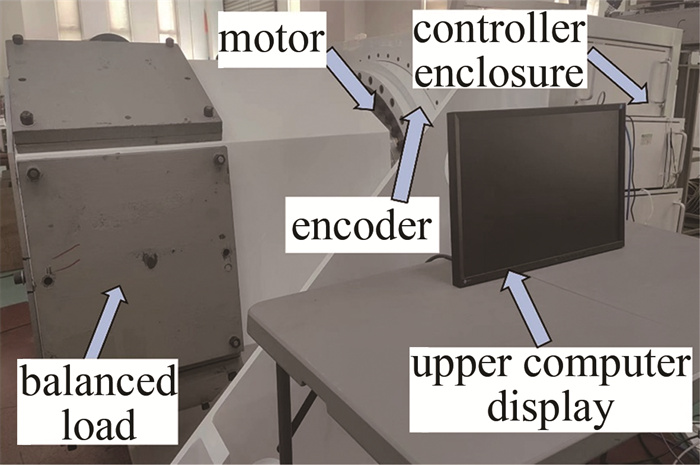
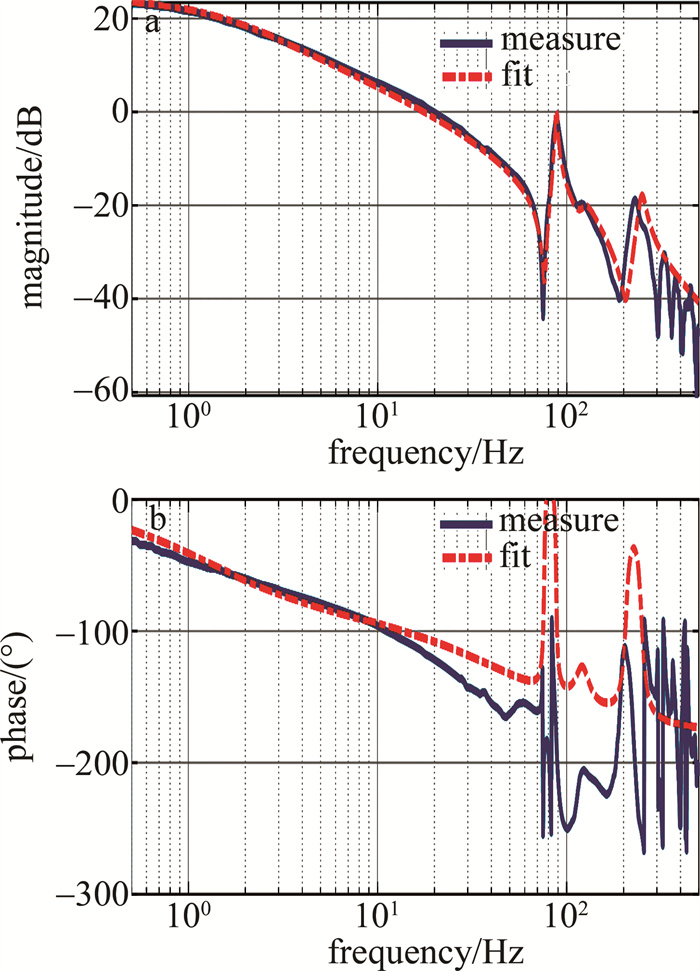
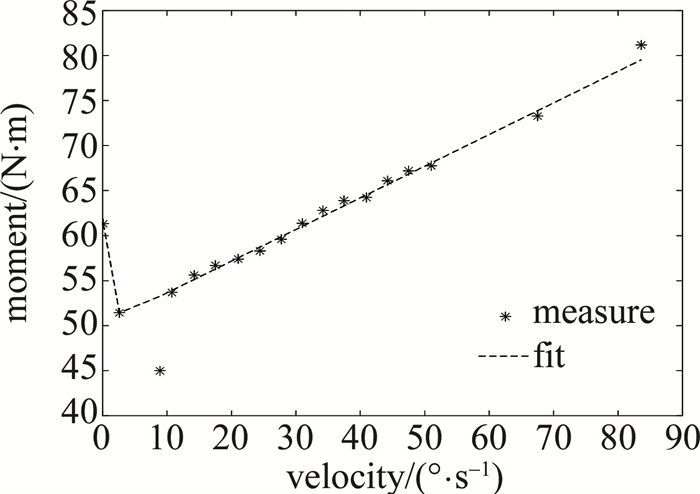
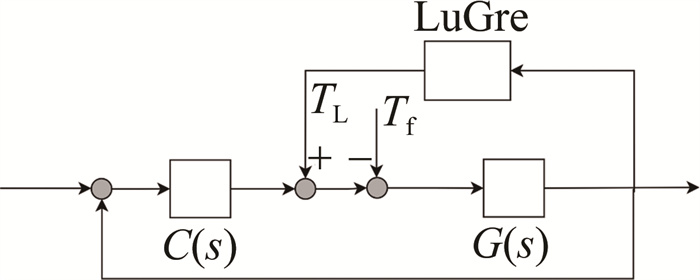
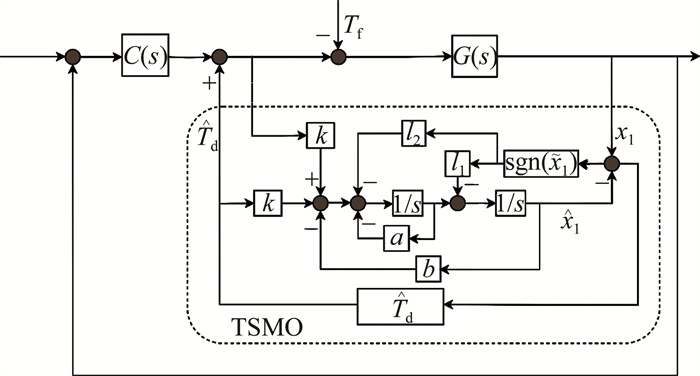
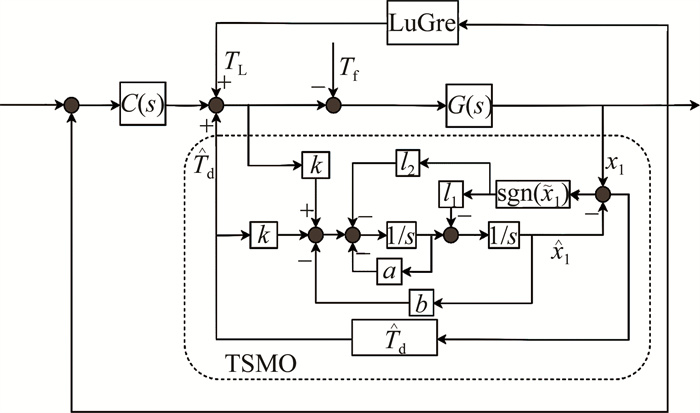
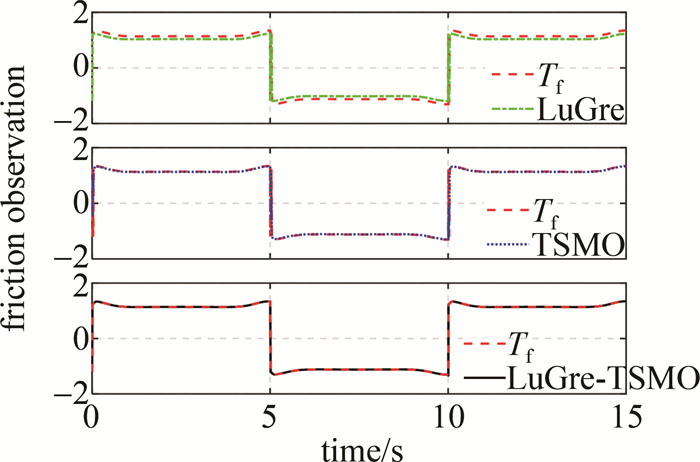
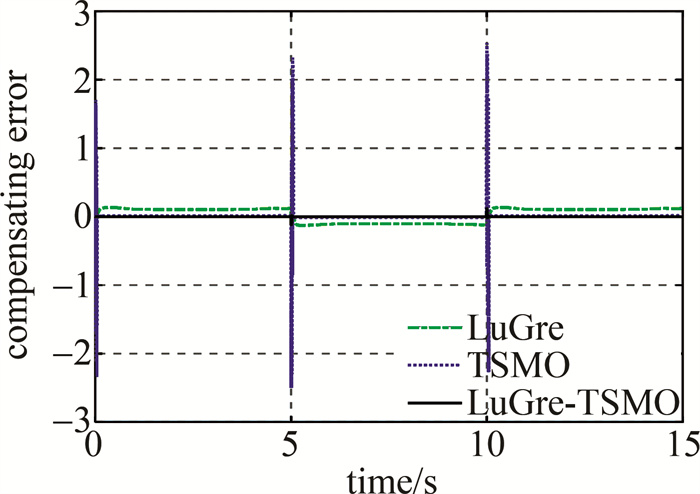
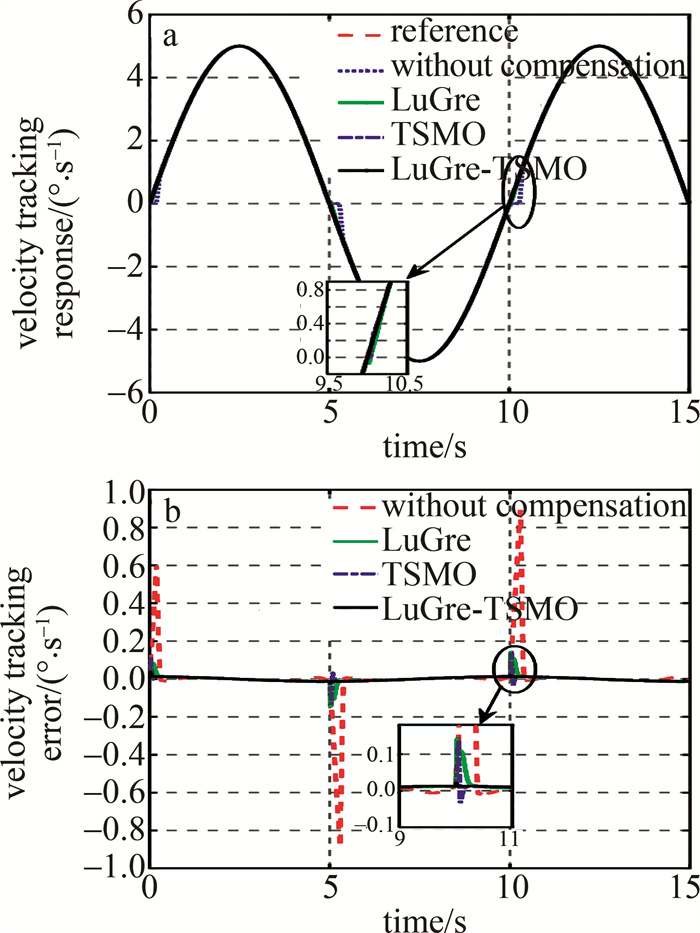
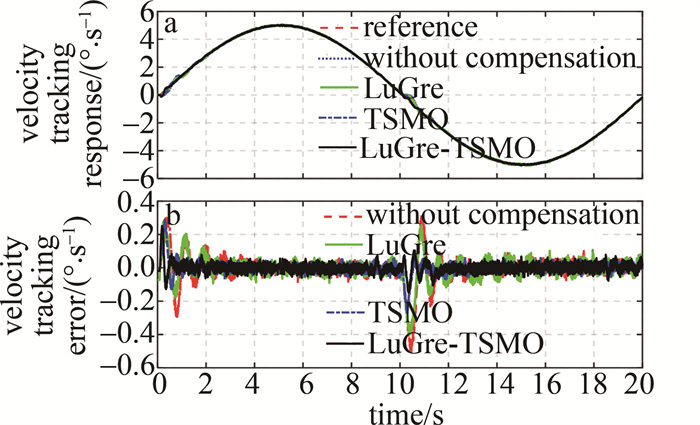
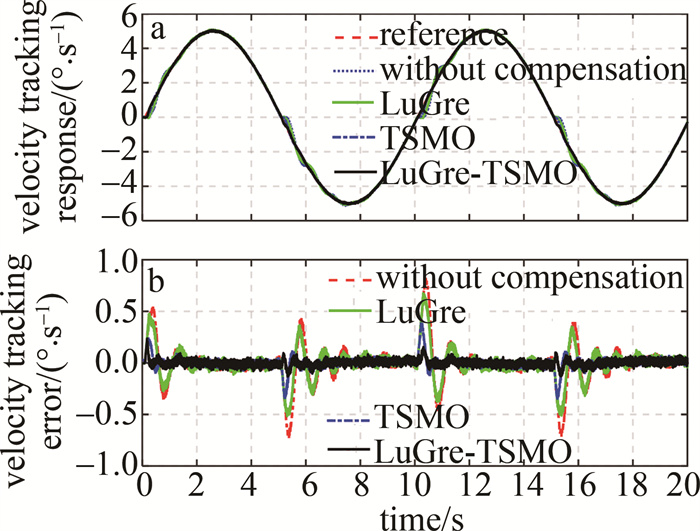
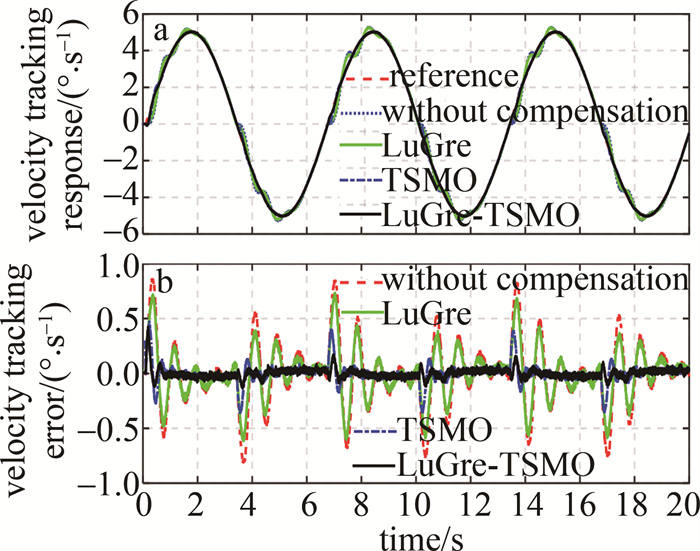
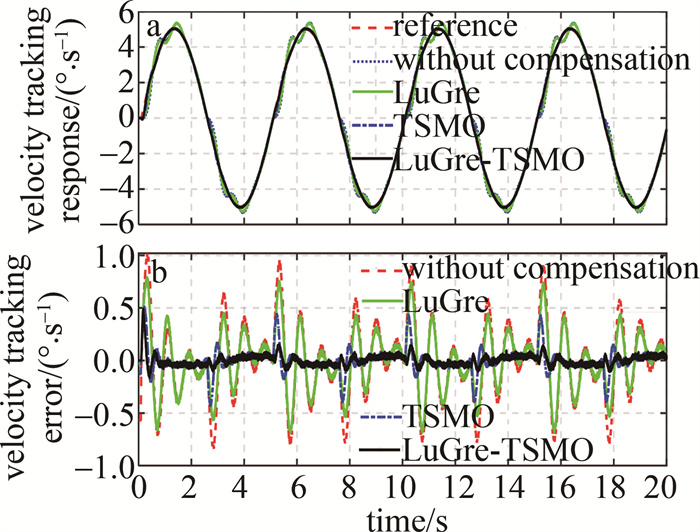
为了解决光电跟踪系统中摩擦扰动问题、进一步提高视轴稳定精度, 采用了LuGre模型和终端滑模观测器(TSMO)融合的补偿方法(LuGre-TSMO), 即在LuGre模型的基础上设计一种基于新型趋近率的终端滑模观测器实现对系统摩擦的2次补偿。结果表明, 相比于未补偿情况, LuGre-TSMO方法的速度跟踪均方根误差平均下降了65. 38%, 有效提高了实验平台视轴稳定精度; 相比于LuGre模型方法和终端滑模观测器方法, LuGre-TSM0方法摩擦补偿效果最好。该方法在光电跟踪系统中是可行且有效的。
为了解决光电跟踪系统中摩擦扰动问题、进一步提高视轴稳定精度, 采用了LuGre模型和终端滑模观测器(TSMO)融合的补偿方法(LuGre-TSMO), 即在LuGre模型的基础上设计一种基于新型趋近率的终端滑模观测器实现对系统摩擦的2次补偿。结果表明, 相比于未补偿情况, LuGre-TSMO方法的速度跟踪均方根误差平均下降了65. 38%, 有效提高了实验平台视轴稳定精度; 相比于LuGre模型方法和终端滑模观测器方法, LuGre-TSM0方法摩擦补偿效果最好。该方法在光电跟踪系统中是可行且有效的。
2024,
48(4):
484-490. doi: 10.7510/jgjs.issn.1001-3806.2024.04.005
摘要:
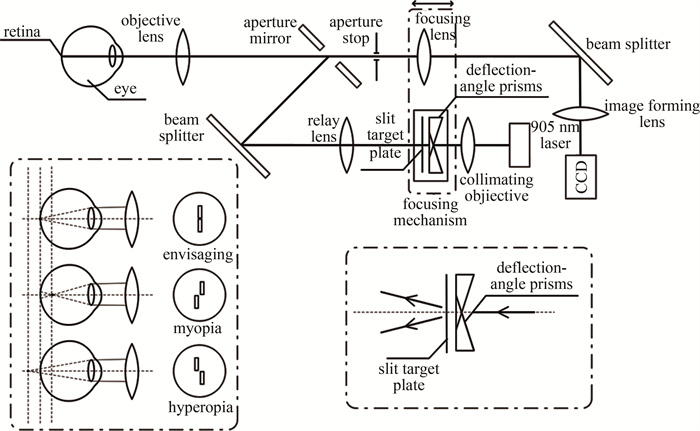
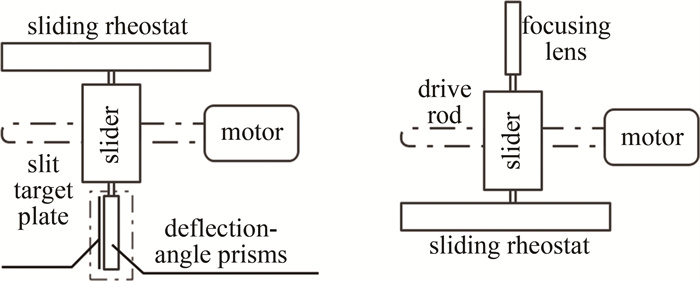
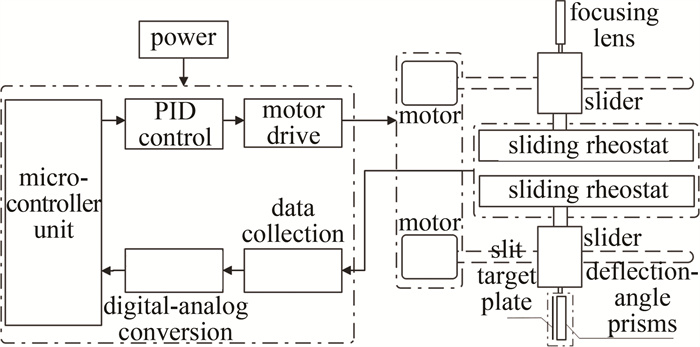
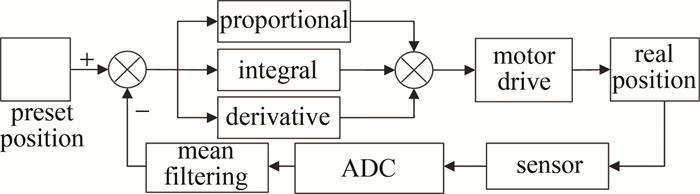
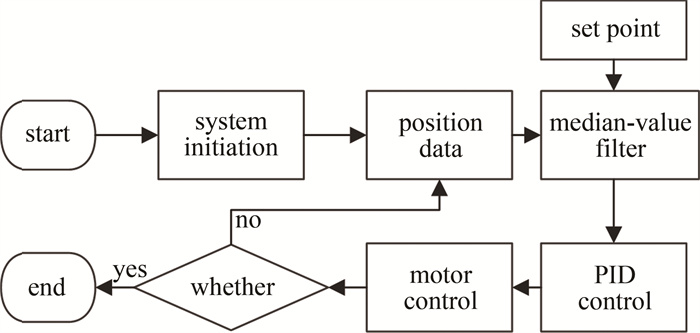
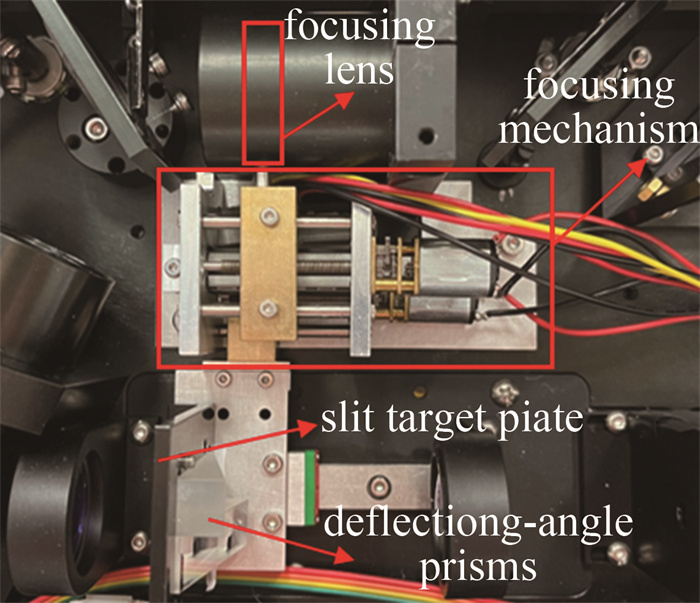
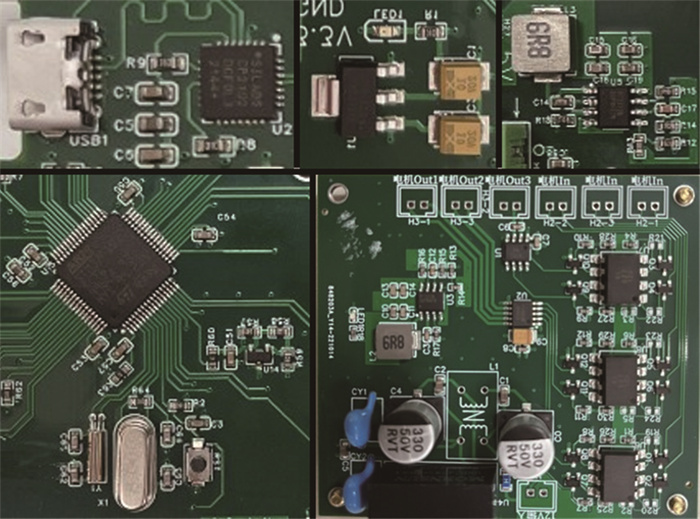
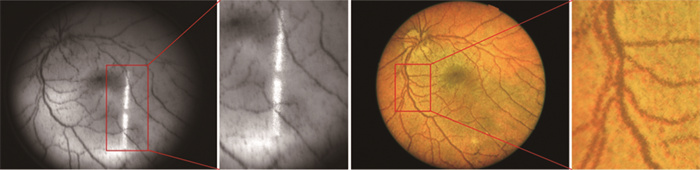
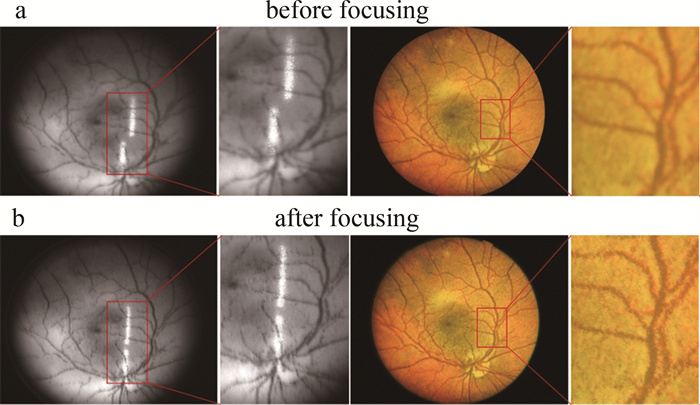
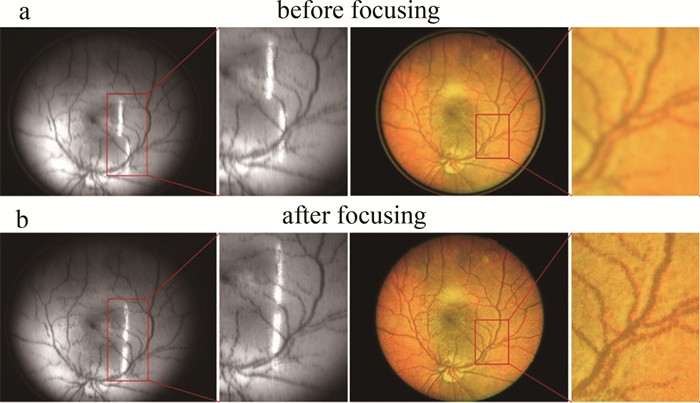
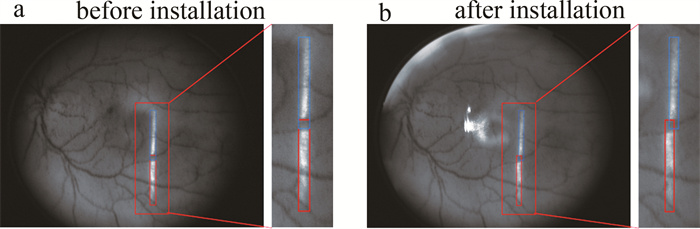
为了实现眼底成像时的精准调焦,设计了双光楔裂像电控调焦系统。采用905 nm近红外半导体激光经双光楔和矩形狭缝在视网膜上形成矩形视标的方法,通过电机控制视度补偿镜和双光楔机构移动,得出视度补偿镜和双光楔位移关联关系;根据矩形视标分离情况实时反馈离焦补偿状态,指导控制系统移动双光楔和视度补偿镜,实现眼底成像时的准确调焦,在模拟眼上开展了眼底成像调焦实验。结果表明,系统可实现-10 m-1~10 m-1屈光度补偿,调焦精度在1 m-1以上。该双光楔裂像电控调焦系统调焦速度快、精度高,为发展自动眼底成像仪器提供了基础。
为了实现眼底成像时的精准调焦,设计了双光楔裂像电控调焦系统。采用905 nm近红外半导体激光经双光楔和矩形狭缝在视网膜上形成矩形视标的方法,通过电机控制视度补偿镜和双光楔机构移动,得出视度补偿镜和双光楔位移关联关系;根据矩形视标分离情况实时反馈离焦补偿状态,指导控制系统移动双光楔和视度补偿镜,实现眼底成像时的准确调焦,在模拟眼上开展了眼底成像调焦实验。结果表明,系统可实现-10 m-1~10 m-1屈光度补偿,调焦精度在1 m-1以上。该双光楔裂像电控调焦系统调焦速度快、精度高,为发展自动眼底成像仪器提供了基础。
2024,
48(4):
527-533. doi: 10.7510/jgjs.issn.1001-3806.2024.04.010
摘要:
为了探究添加不同质量分数铜对铜钴合金复合涂层的影响,利用激光熔覆技术在316L不锈钢基体上制备铜钴合金复合涂层,对铜钴合金复合涂层进行了理论分析和实验验证。结果表明,铜钴合金复合涂层晶粒类型主要有树枝晶和柱状晶,添加质量分数为1%铜基合金时,熔覆层晶粒组织最为致密且晶粒尺寸最小,随着铜质量分数的提升,熔覆层晶粒尺寸逐渐增大,当添加铜质量分数为10%时出现明显气孔及富集颗粒;铜钴合金复合涂层的显微硬度较基体均得到明显提高,当添加质量分数1%的铜时,熔覆层维氏硬度达到最优,可达540.4 HV,较基体平均硬度提升了1.65倍;对铜钴合金复合涂层进行X射线衍射仪分析后发现,复合涂层中的物相主要有CoCx、Co0.52Cu0.48、Cr2Fe14C等物相;对铜钴合金复合涂层进行能谱分析后发现,复合涂层中的Co、Cu、Fe与Cr等元素,在基材316L不锈钢与复合涂层之间,出现明显的扩散现象,添加铜基合金质量分数增大后,Fe、Ni元素的沉降现象愈发明显;随着铜的质量分数提升,合金涂层的耐腐蚀性呈现先增强后减弱的趋势,在质量分数为1%时获得最优耐腐蚀性。该研究对扩展铜钴合金复合涂层实际应用范围具有一定意义。
为了探究添加不同质量分数铜对铜钴合金复合涂层的影响,利用激光熔覆技术在316L不锈钢基体上制备铜钴合金复合涂层,对铜钴合金复合涂层进行了理论分析和实验验证。结果表明,铜钴合金复合涂层晶粒类型主要有树枝晶和柱状晶,添加质量分数为1%铜基合金时,熔覆层晶粒组织最为致密且晶粒尺寸最小,随着铜质量分数的提升,熔覆层晶粒尺寸逐渐增大,当添加铜质量分数为10%时出现明显气孔及富集颗粒;铜钴合金复合涂层的显微硬度较基体均得到明显提高,当添加质量分数1%的铜时,熔覆层维氏硬度达到最优,可达540.4 HV,较基体平均硬度提升了1.65倍;对铜钴合金复合涂层进行X射线衍射仪分析后发现,复合涂层中的物相主要有CoCx、Co0.52Cu0.48、Cr2Fe14C等物相;对铜钴合金复合涂层进行能谱分析后发现,复合涂层中的Co、Cu、Fe与Cr等元素,在基材316L不锈钢与复合涂层之间,出现明显的扩散现象,添加铜基合金质量分数增大后,Fe、Ni元素的沉降现象愈发明显;随着铜的质量分数提升,合金涂层的耐腐蚀性呈现先增强后减弱的趋势,在质量分数为1%时获得最优耐腐蚀性。该研究对扩展铜钴合金复合涂层实际应用范围具有一定意义。










2024,
48(4):
542-548. doi: 10.7510/jgjs.issn.1001-3806.2024.04.012
摘要:
为了提高Q235钢材在海水中的耐腐蚀性能,扩大其应用场合,使其能够服役于富含Cl离子的海洋环境,采用激光熔覆技术,在Q235钢表面制备出添加不同质量分数CeO2改性的Ni基/WC复合熔覆层,并利用扫描电镜、能谱仪和电化学工作站等仪器对熔覆层的组织与性能进行了测试。结果表明,适量CeO2的加入可以促进晶粒细化与组织的均匀分布,提高熔覆层在NaCl溶液(质量分数为3.5%)中的耐腐蚀性能;当添加的CeO2质量分数达到1%时,熔覆层具有最高的平均硬度与最好的耐海水腐蚀性能;过高的CeO2含量则会加剧电偶腐蚀效应,降低其耐腐蚀性能。该研究为后续在Q235钢材表面制备耐腐蚀的激光熔覆合金涂层、改善合金材料表面性能提供了理论参考依据。
为了提高Q235钢材在海水中的耐腐蚀性能,扩大其应用场合,使其能够服役于富含Cl离子的海洋环境,采用激光熔覆技术,在Q235钢表面制备出添加不同质量分数CeO2改性的Ni基/WC复合熔覆层,并利用扫描电镜、能谱仪和电化学工作站等仪器对熔覆层的组织与性能进行了测试。结果表明,适量CeO2的加入可以促进晶粒细化与组织的均匀分布,提高熔覆层在NaCl溶液(质量分数为3.5%)中的耐腐蚀性能;当添加的CeO2质量分数达到1%时,熔覆层具有最高的平均硬度与最好的耐海水腐蚀性能;过高的CeO2含量则会加剧电偶腐蚀效应,降低其耐腐蚀性能。该研究为后续在Q235钢材表面制备耐腐蚀的激光熔覆合金涂层、改善合金材料表面性能提供了理论参考依据。










2024,
48(4):
549-555. doi: 10.7510/jgjs.issn.1001-3806.2024.04.013
摘要:
为了解决涂覆于金属基底材料上的润滑油膜非接触无损检测问题,采用全光学方法,基于本征光吸收原理对相关问题进行了研究。以大型开式齿轮润滑油膜为例,基于润滑油膜本征光吸收谱,确定了检测使用的最优照明光波长;然后检测并分析了金属基底上不同厚度油膜的图像,建立了油膜厚度与图像灰度的对应关系。在此基础上,搭建检测装置,分别使用针对最优波长光进行优化的光源和CCD作为照明及采集装置,进行图像采集实验,对其探测能力进行了验证。结果表明,该方法可为大型开齿润滑油膜状态监测提供技术支持,也可为其它固体附着油膜厚度的检测提供可行的技术参考。
为了解决涂覆于金属基底材料上的润滑油膜非接触无损检测问题,采用全光学方法,基于本征光吸收原理对相关问题进行了研究。以大型开式齿轮润滑油膜为例,基于润滑油膜本征光吸收谱,确定了检测使用的最优照明光波长;然后检测并分析了金属基底上不同厚度油膜的图像,建立了油膜厚度与图像灰度的对应关系。在此基础上,搭建检测装置,分别使用针对最优波长光进行优化的光源和CCD作为照明及采集装置,进行图像采集实验,对其探测能力进行了验证。结果表明,该方法可为大型开齿润滑油膜状态监测提供技术支持,也可为其它固体附着油膜厚度的检测提供可行的技术参考。









2024,
48(4):
565-571. doi: 10.7510/jgjs.issn.1001-3806.2024.04.015
摘要:
为了探究激光工艺对钢件表面油污层清洗质量的影响规律,采用脉冲激光器对Q235钢板试样进行了激光除污清洗试验, 并检测了试样表面清洗质量和损伤情况。理论分析了清洗过程中激光束对油污层和基体钢件作用的机理与效果,建立了激光热效应模型,通过仿真计算与实验,分析出离焦程度对基体表面温度的影响程度;实验验证了激光清洗工艺中不同离焦程度下对Q235钢件表面油污的去除效果和钢件表面的损伤效果。结果表明,激光清洗Q235钢件表面油污层的最优工艺参数是离焦程度为5 mm,平均功率为4 W,可见离焦程度因素对清洗效果的影响远大于激光功率因素。该研究为金属表面油污处理工艺和激光清洗提供了一定参考。
为了探究激光工艺对钢件表面油污层清洗质量的影响规律,采用脉冲激光器对Q235钢板试样进行了激光除污清洗试验, 并检测了试样表面清洗质量和损伤情况。理论分析了清洗过程中激光束对油污层和基体钢件作用的机理与效果,建立了激光热效应模型,通过仿真计算与实验,分析出离焦程度对基体表面温度的影响程度;实验验证了激光清洗工艺中不同离焦程度下对Q235钢件表面油污的去除效果和钢件表面的损伤效果。结果表明,激光清洗Q235钢件表面油污层的最优工艺参数是离焦程度为5 mm,平均功率为4 W,可见离焦程度因素对清洗效果的影响远大于激光功率因素。该研究为金属表面油污处理工艺和激光清洗提供了一定参考。












2024,
48(4):
590-596. doi: 10.7510/jgjs.issn.1001-3806.2024.04.019
摘要:
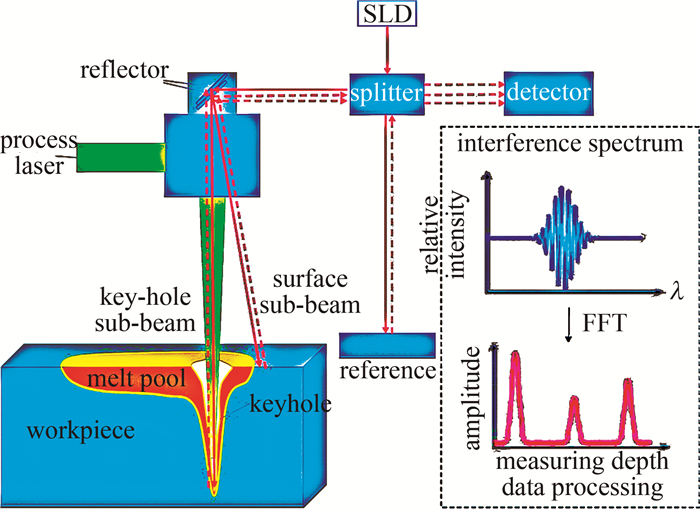
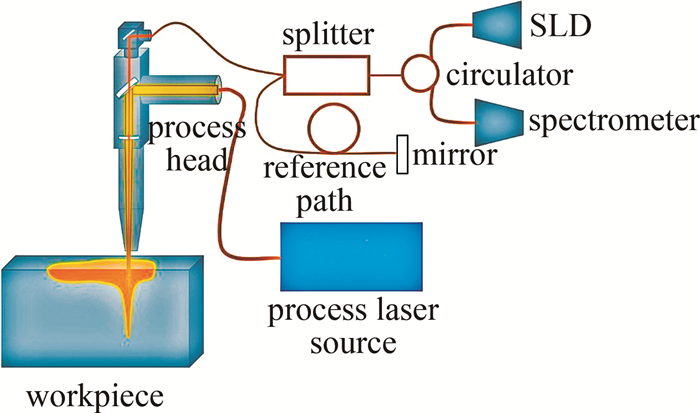
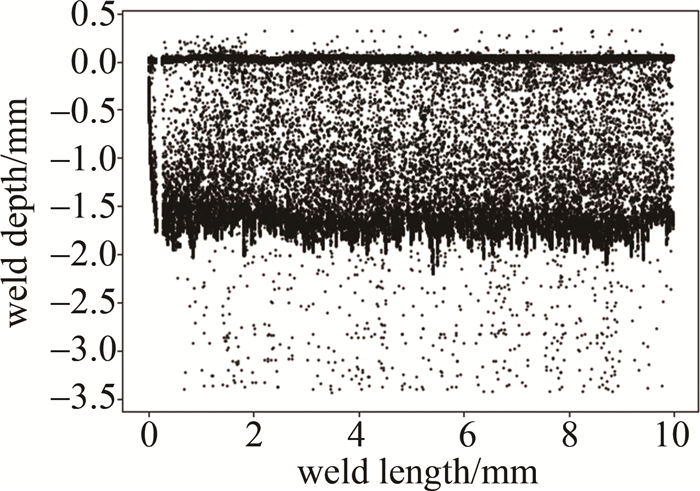
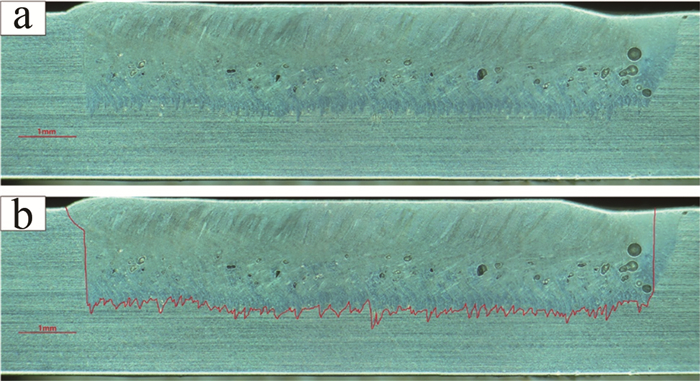
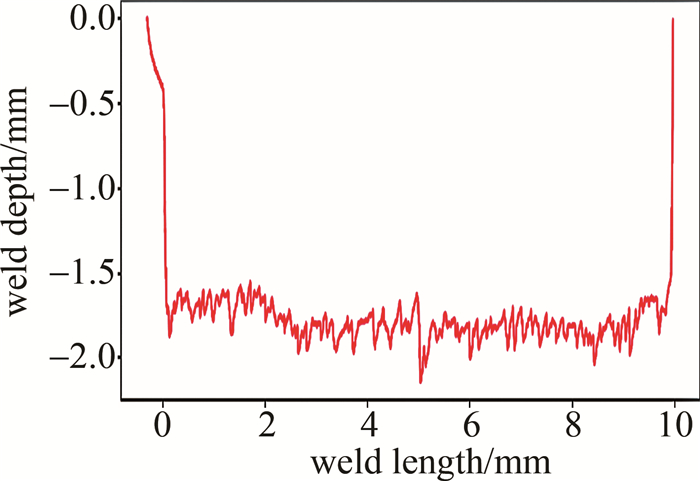
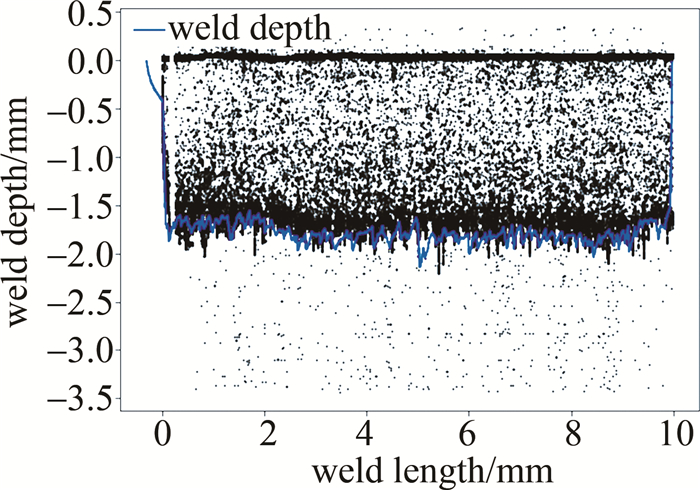
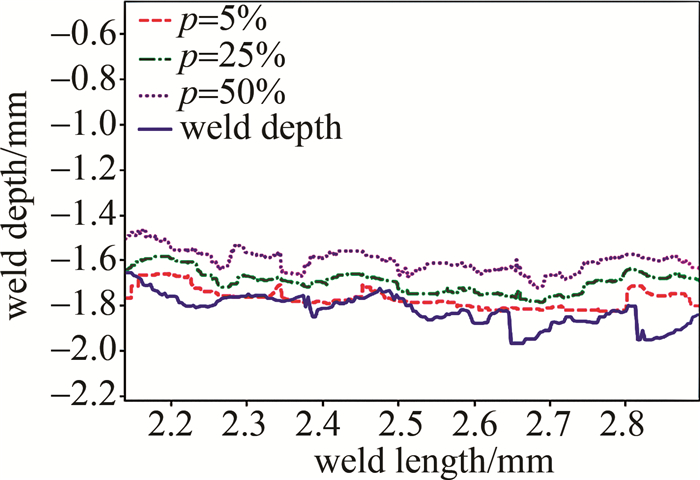
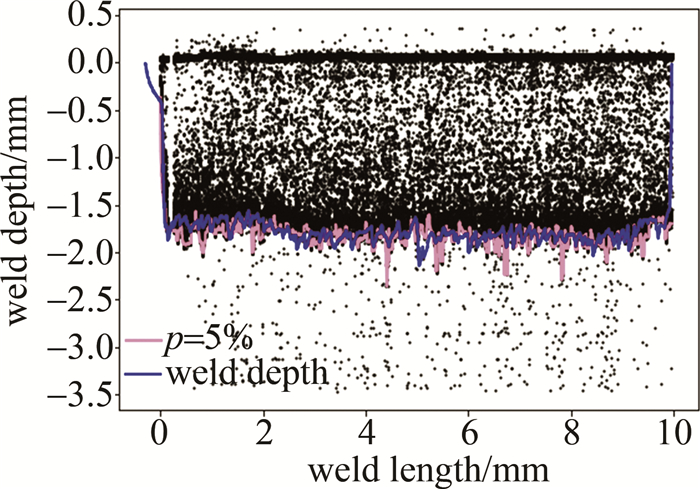
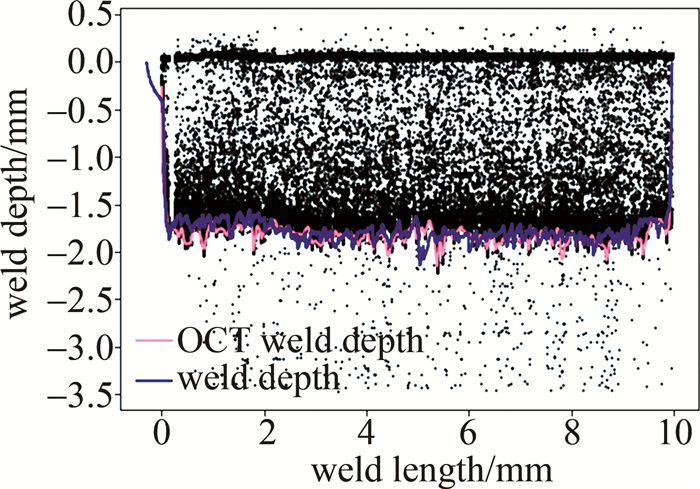
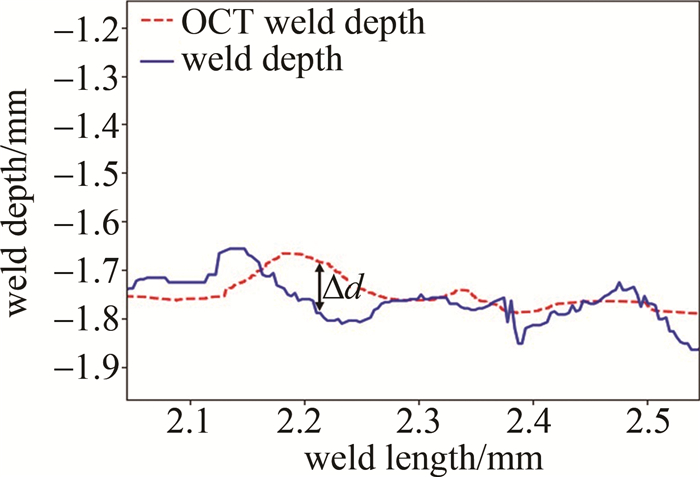
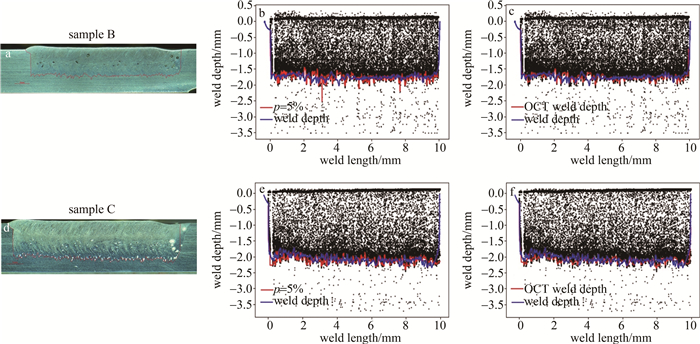
为了解决激光焊接熔深在线检测及光学相干光层析成像(OCT)熔深检测信号噪声多的问题,采用了一种百分位滤波加移动平均算法的熔深曲线拟合方法。通过光学相干光层析成像系统对304不锈钢匙孔焊过程进行了熔深在线检测,在使用百分位滤波从原始散点数据中提取出百分位熔深曲线过程中,发现该方法提取的百分位熔深曲线存在尖峰干扰噪声,通过移动平均算法对百分位熔深曲线进行低通滤波处理,最终从原始散点数据中提取拟合出OCT熔深测量曲线。结果表明,将OCT熔深测量曲线与焊缝纵抛面的实际熔深曲线进行对比,该方法获取OCT熔深测量曲线的测量精度最大提升了15%。该方法能从OCT原始散点数据中有效提取拟合出更为准确的OCT熔深测量曲线。
为了解决激光焊接熔深在线检测及光学相干光层析成像(OCT)熔深检测信号噪声多的问题,采用了一种百分位滤波加移动平均算法的熔深曲线拟合方法。通过光学相干光层析成像系统对304不锈钢匙孔焊过程进行了熔深在线检测,在使用百分位滤波从原始散点数据中提取出百分位熔深曲线过程中,发现该方法提取的百分位熔深曲线存在尖峰干扰噪声,通过移动平均算法对百分位熔深曲线进行低通滤波处理,最终从原始散点数据中提取拟合出OCT熔深测量曲线。结果表明,将OCT熔深测量曲线与焊缝纵抛面的实际熔深曲线进行对比,该方法获取OCT熔深测量曲线的测量精度最大提升了15%。该方法能从OCT原始散点数据中有效提取拟合出更为准确的OCT熔深测量曲线。
2024,
48(4):
597-602. doi: 10.7510/jgjs.issn.1001-3806.2024.04.020
摘要:
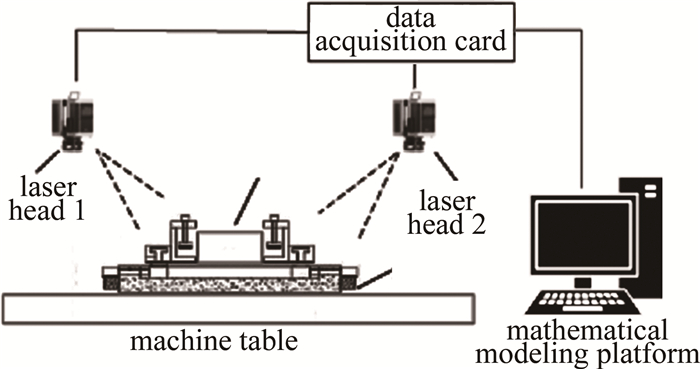
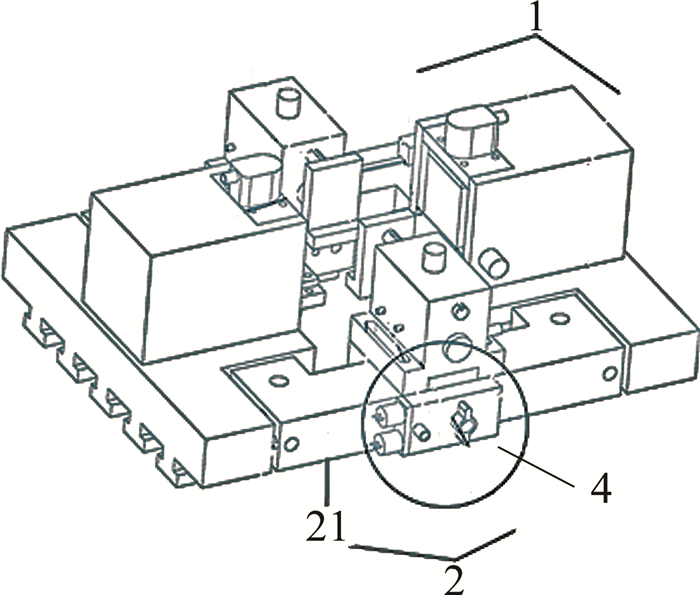
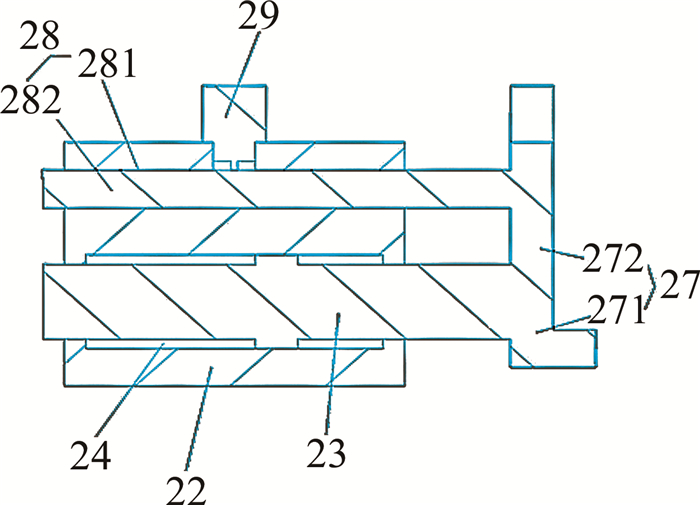
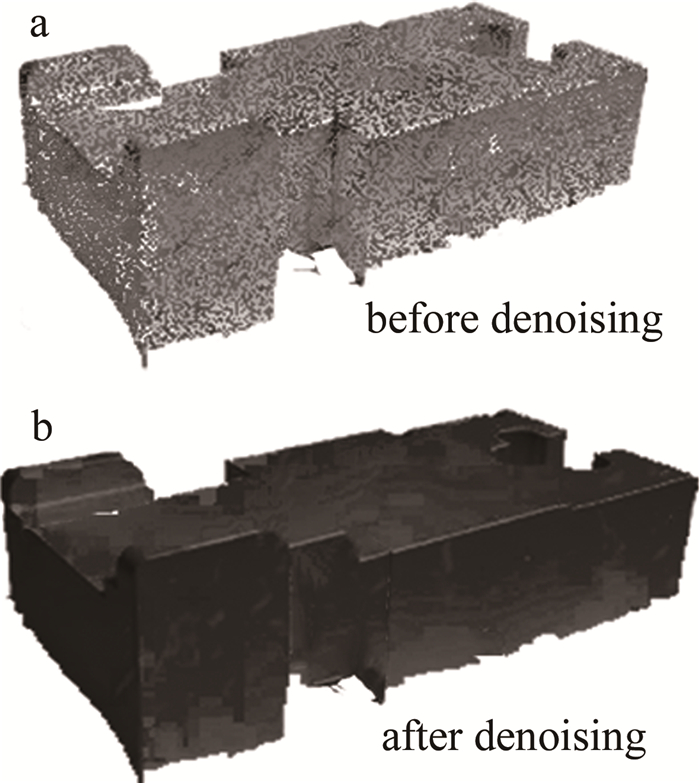
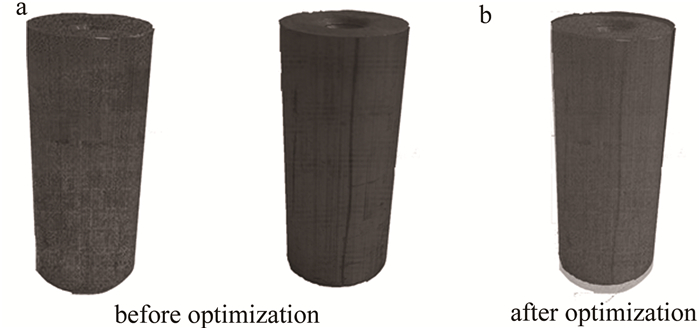
为了解决传统机床夹具通用性不高、多次对刀和装夹带来误差和效率较低的问题,提出了一种基于点云逆向建模技术的机床夹具改进方案。通过在夹具两侧加装激光扫描仪以获取工件和夹具的3维点云信息,分别采用曲率判别算法和基于粒子群搜索的迭代最近点算法对其进行去噪处理和坐标配准,建立工件与机床一体的3维空间坐标;最后根据参考点的点云坐标计算空间坐标系与机床坐标系的偏移量,将获得的偏移值录入数控系统进行加工。结果表明,改进后的夹具在加工工序较为复杂的零件时,可以有效减少对刀和装夹次数,总体工效提升约30%。该研究对于提升加工面较多、工序较为复杂零件的加工效率具有一定的参考价值。
为了解决传统机床夹具通用性不高、多次对刀和装夹带来误差和效率较低的问题,提出了一种基于点云逆向建模技术的机床夹具改进方案。通过在夹具两侧加装激光扫描仪以获取工件和夹具的3维点云信息,分别采用曲率判别算法和基于粒子群搜索的迭代最近点算法对其进行去噪处理和坐标配准,建立工件与机床一体的3维空间坐标;最后根据参考点的点云坐标计算空间坐标系与机床坐标系的偏移量,将获得的偏移值录入数控系统进行加工。结果表明,改进后的夹具在加工工序较为复杂的零件时,可以有效减少对刀和装夹次数,总体工效提升约30%。该研究对于提升加工面较多、工序较为复杂零件的加工效率具有一定的参考价值。

2024,
48(4):
603-607. doi: 10.7510/jgjs.issn.1001-3806.2024.04.021
摘要:
为了获得激光加工等应用中气流环境激光辐照材料的热响应特性和熔穿规律,采用面热源近似和不定常热传导分析方法构建了包括热传导、对流换热、熔化烧蚀等主要机制的物理模型,并通过实验校核后进行了气流环境激光辐照铝合金热学响应定量评估,获得气流环境不同激光功率密度下铝合金靶板温升和烧蚀熔穿规律。结果表明,相同靶参数下,熔穿时间随着激光功率密度增加而急剧减小,并且熔穿时间变化规律与热平衡积分方法气化烧蚀模型结果一致;不同条件下熔穿时间显示,在激光功率密度较小(500 W/cm2附近)时,气流引起对流换热因素对激光烧蚀熔穿影响较大,而在激光功率密度较高(1500 W/cm2以上)时,气流引起对流换热因素对激光烧蚀熔穿影响较小。建立的气流条件下激光辐照热响应模型与实际物理过程更接近,计算获得的熔穿规律为激光辐照模型合理简化提供了定量的参考依据。
为了获得激光加工等应用中气流环境激光辐照材料的热响应特性和熔穿规律,采用面热源近似和不定常热传导分析方法构建了包括热传导、对流换热、熔化烧蚀等主要机制的物理模型,并通过实验校核后进行了气流环境激光辐照铝合金热学响应定量评估,获得气流环境不同激光功率密度下铝合金靶板温升和烧蚀熔穿规律。结果表明,相同靶参数下,熔穿时间随着激光功率密度增加而急剧减小,并且熔穿时间变化规律与热平衡积分方法气化烧蚀模型结果一致;不同条件下熔穿时间显示,在激光功率密度较小(500 W/cm2附近)时,气流引起对流换热因素对激光烧蚀熔穿影响较大,而在激光功率密度较高(1500 W/cm2以上)时,气流引起对流换热因素对激光烧蚀熔穿影响较小。建立的气流条件下激光辐照热响应模型与实际物理过程更接近,计算获得的熔穿规律为激光辐照模型合理简化提供了定量的参考依据。





2024,
48(4):
463-469. doi: 10.7510/jgjs.issn.1001-3806.2024.04.002
摘要:
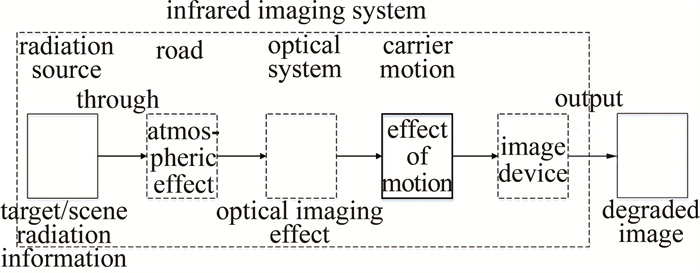
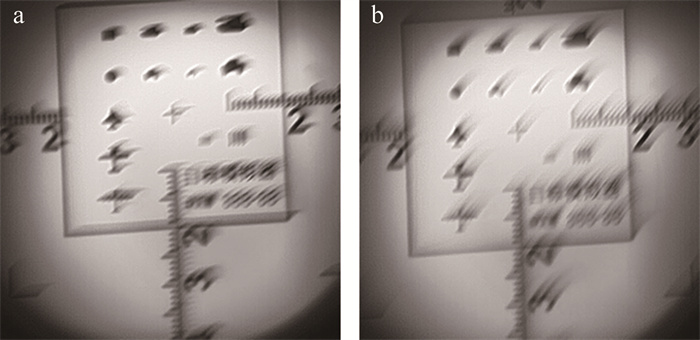
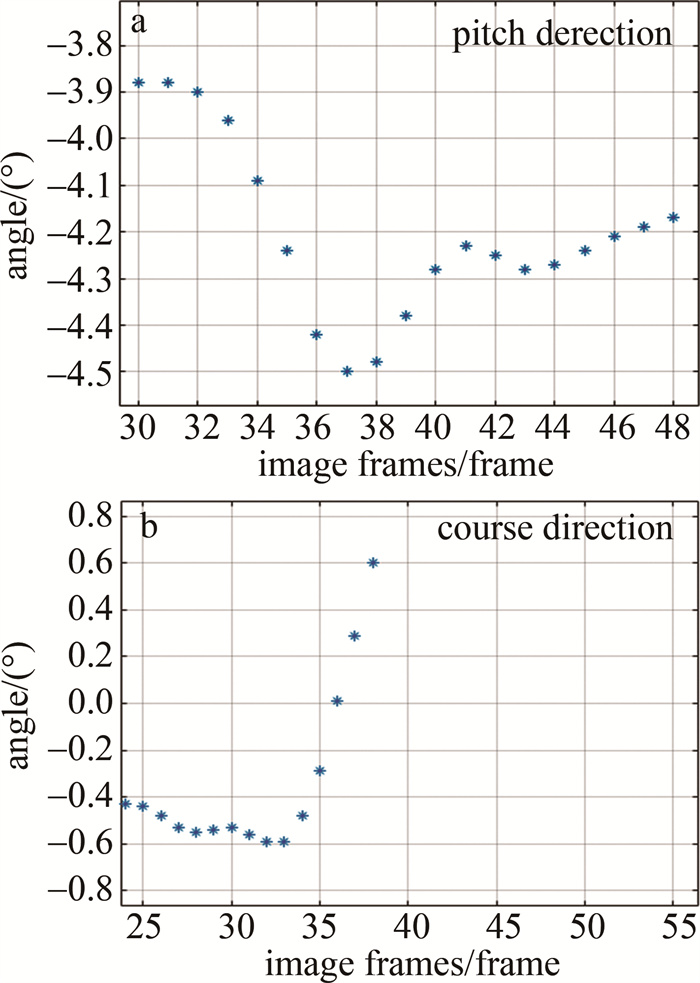
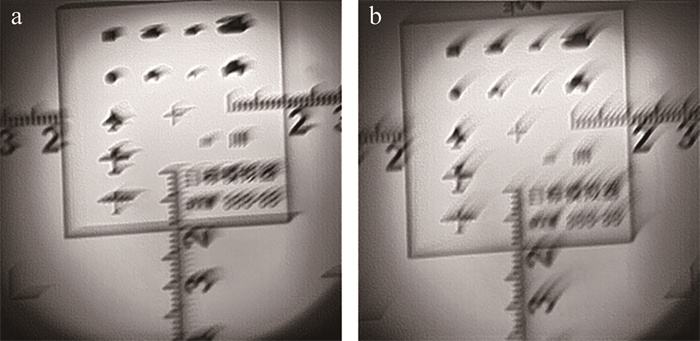
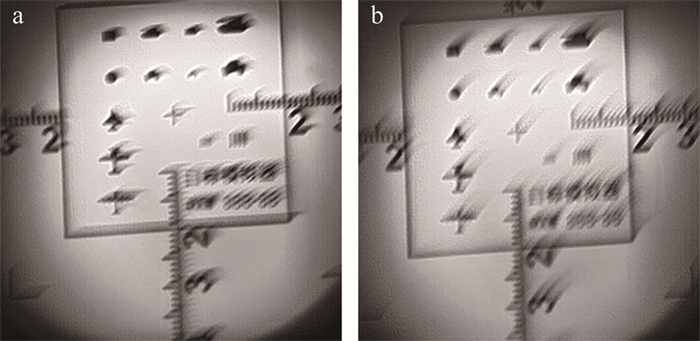
为了实现红外运动模糊图像复原,采用了基于红外图像的非局部稀疏先验约束建模方法。通过分析红外运动模糊成像特征,在盲反卷积框架下,提出了一种基于运动信息的图像非局部稀疏先验约束建模方法,通过计算图像的运动模糊核,进而复原运动模糊图像。结果表明,所提出的基于运动信息的图像非局部稀疏先验约束方法,针对性强,能有效地复原运动幅值较大的红外运动模糊图像;概率模糊检测、结构相似度和峰值信噪比均有不同程度的提高,尤其是峰值信噪比提高接近8%,且运动幅值越大,复原结果越明显。本研究为红外成像系统的应用打下了基础。
为了实现红外运动模糊图像复原,采用了基于红外图像的非局部稀疏先验约束建模方法。通过分析红外运动模糊成像特征,在盲反卷积框架下,提出了一种基于运动信息的图像非局部稀疏先验约束建模方法,通过计算图像的运动模糊核,进而复原运动模糊图像。结果表明,所提出的基于运动信息的图像非局部稀疏先验约束方法,针对性强,能有效地复原运动幅值较大的红外运动模糊图像;概率模糊检测、结构相似度和峰值信噪比均有不同程度的提高,尤其是峰值信噪比提高接近8%,且运动幅值越大,复原结果越明显。本研究为红外成像系统的应用打下了基础。

2024,
48(4):
477-483. doi: 10.7510/jgjs.issn.1001-3806.2024.04.004
摘要:
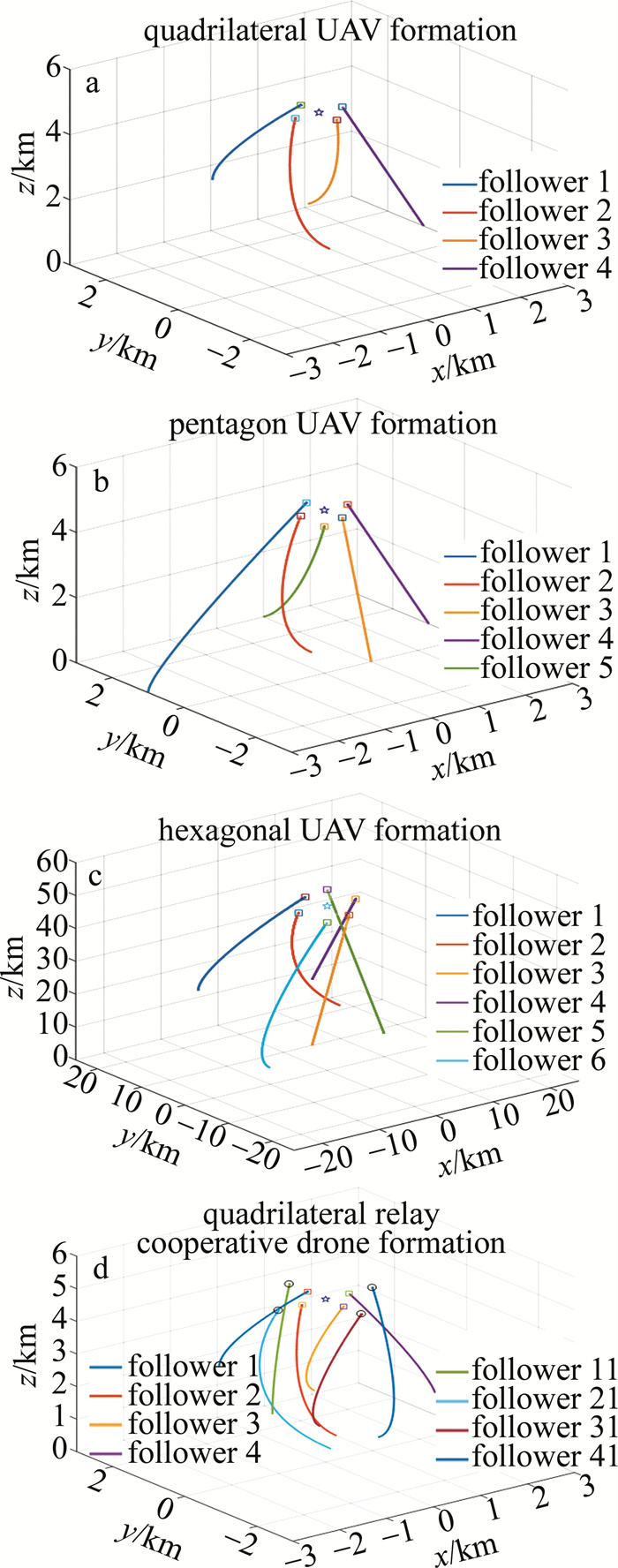
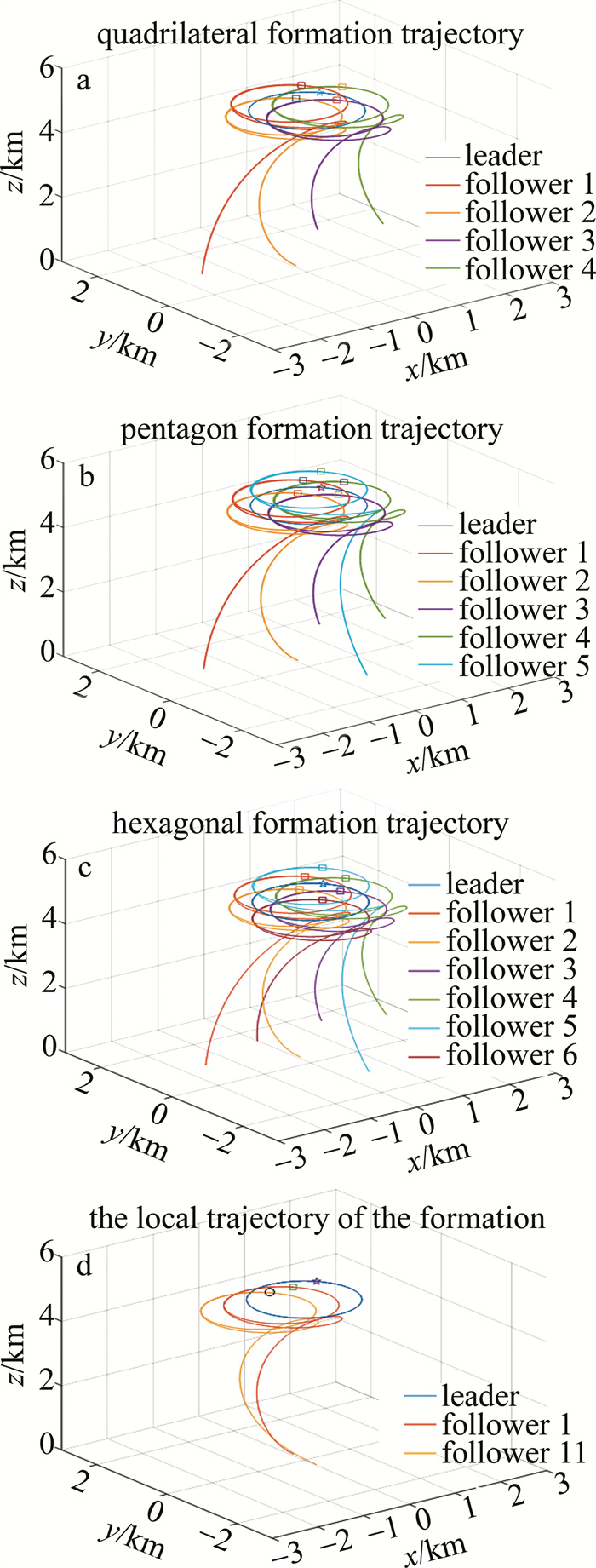
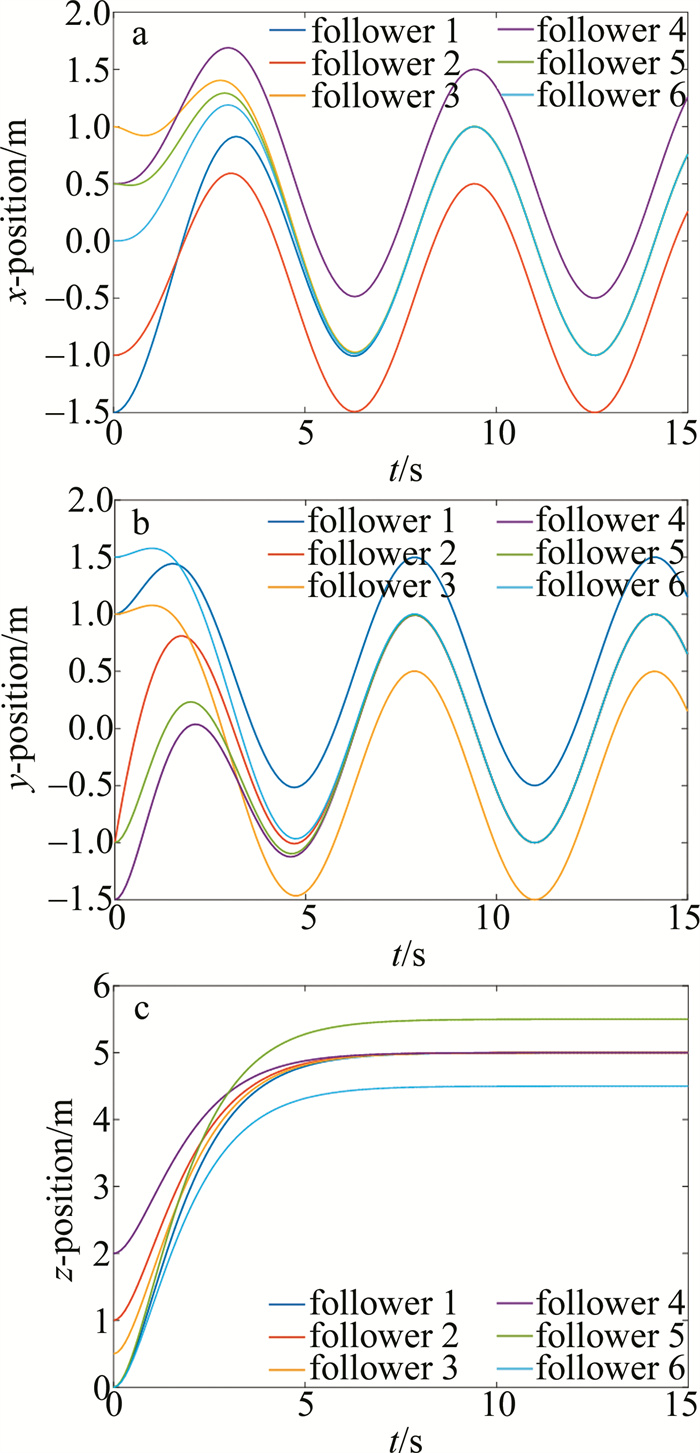
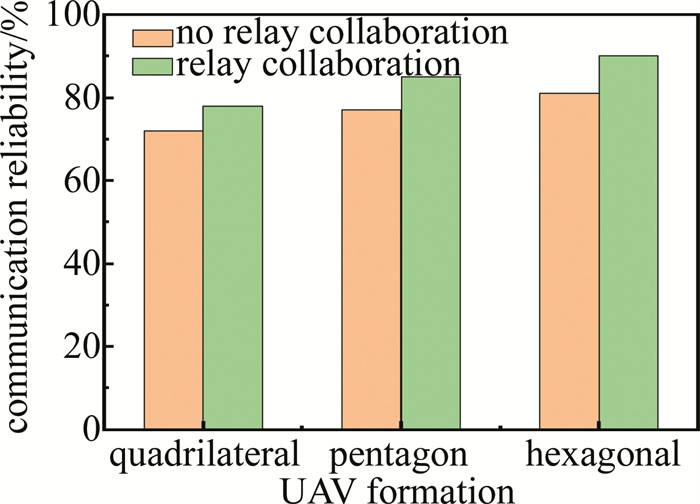
为了解决无人机集结编队时机间通信易受强电磁干扰问题,采用紫外信标模型完成集群无人机的信息交互,从而实现集结定位,将一致性理论与无线紫外光虚拟势场避障法相结合,在空中集结时使无人机编队的飞行姿态、航向角以及速度保持一致,以跟随无人机作为中继节点,提升相邻无人机发现概率,提高编队队形准确性;同时提出无线紫外光通信协作无人机中继集结编队方法,实现了无人机编队快速准确形成期望编队队形。结果表明,所提方法使得无人机四边形编队、五边形编队、六边形编队的通信可靠性分别提升了7.69%、9.41%和10.0%。该研究为无人机编队集结方法和无人机编队中的机间通信提供了一定的理论参考。
为了解决无人机集结编队时机间通信易受强电磁干扰问题,采用紫外信标模型完成集群无人机的信息交互,从而实现集结定位,将一致性理论与无线紫外光虚拟势场避障法相结合,在空中集结时使无人机编队的飞行姿态、航向角以及速度保持一致,以跟随无人机作为中继节点,提升相邻无人机发现概率,提高编队队形准确性;同时提出无线紫外光通信协作无人机中继集结编队方法,实现了无人机编队快速准确形成期望编队队形。结果表明,所提方法使得无人机四边形编队、五边形编队、六边形编队的通信可靠性分别提升了7.69%、9.41%和10.0%。该研究为无人机编队集结方法和无人机编队中的机间通信提供了一定的理论参考。


2024,
48(4):
491-498. doi: 10.7510/jgjs.issn.1001-3806.2024.04.006
摘要:
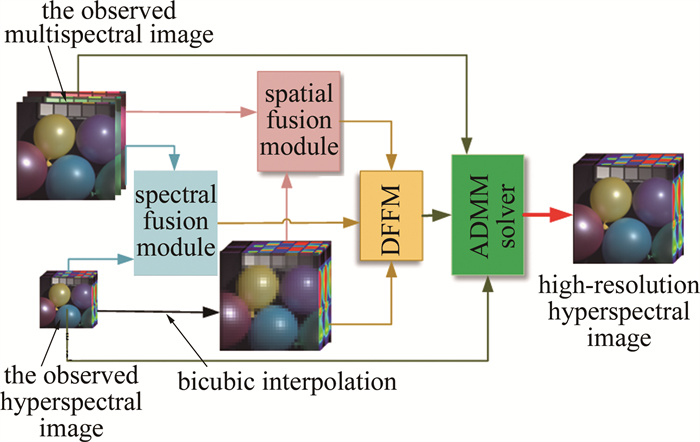
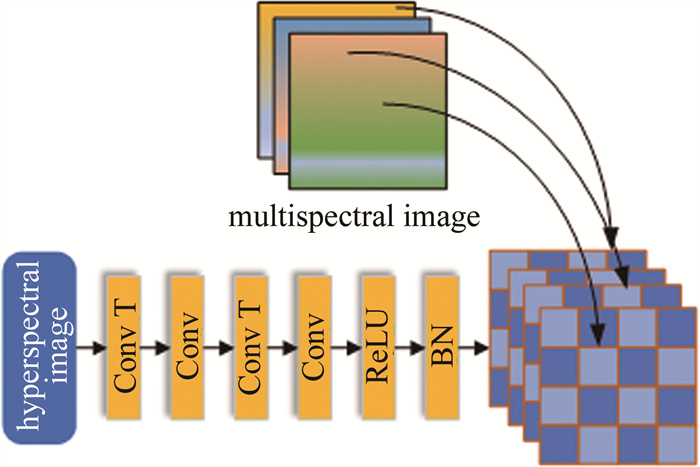
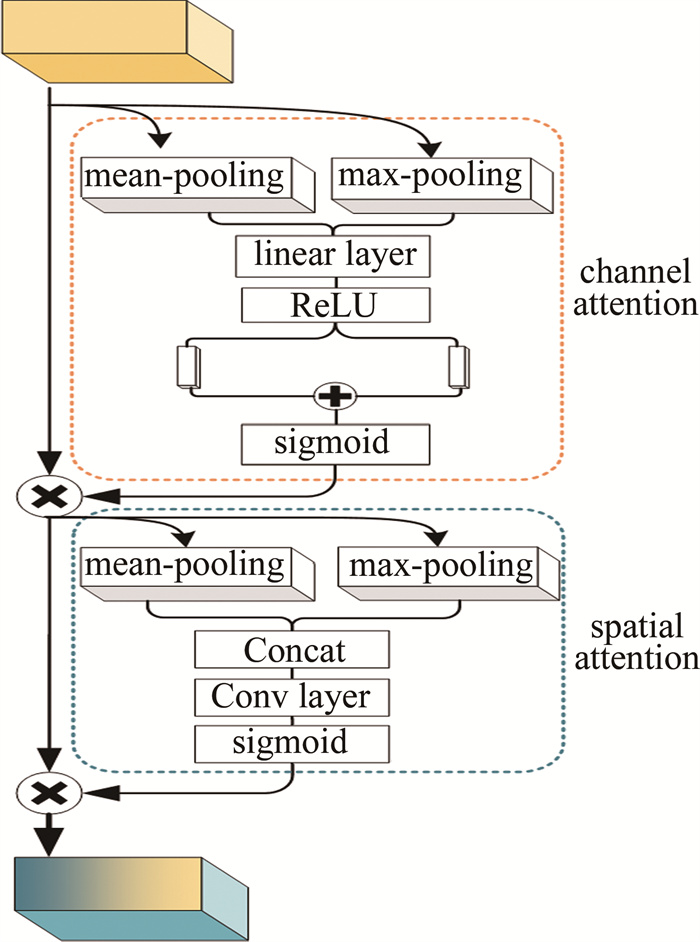
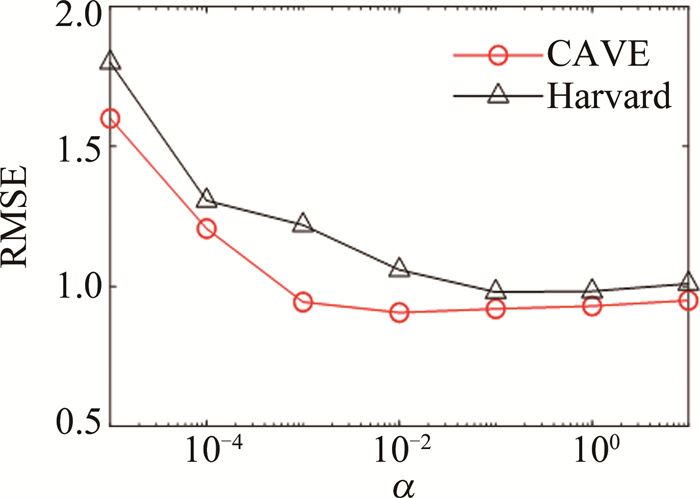
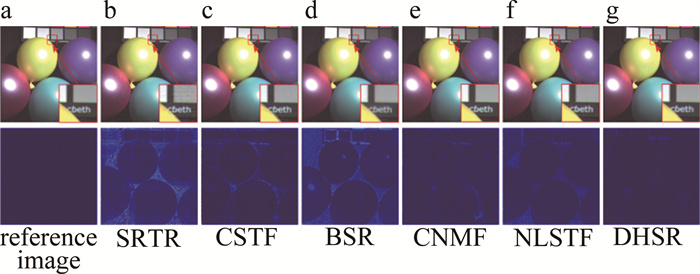
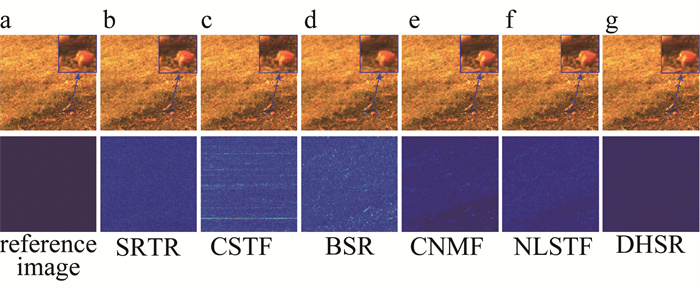
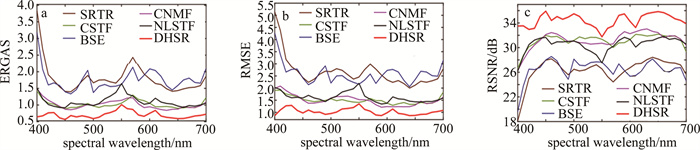
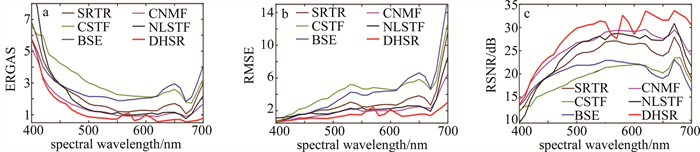
为了解决现有的高光谱超分辨率方法依赖于手工先验和数据驱动先验会导致参数选择困难或可解释性差的问题,采用一种基于自适应深度先验正则的高光谱图像超分辨率方法,进行了理论分析和实验验证。首先设计基于卷积神经网络的多阶段特征提取网络,提取退化图像的空间和光谱信息;其次将提取到的空-谱先验输入基于transformer模型的特征融合模块;然后自适应交互空域和谱域的互补信息,以捕获图像的全局先验特征;最后在退化模型中插入深度先验正则项,将超分辨率问题表述为一个优化问题,其解可以通过交替方向乘子法获得并降低求解复杂度。结果表明,所提出算法在信噪比均为35 dB时,重建信噪比分别达到了34.16 dB和29.35 dB, 比次优算法高出2.78 dB和2.17 dB,重建的高分辨率高光谱图像与其固有结构具有较高的一致性。该研究为综合利用手工先验和数据驱动先验增强高光谱图像空间分辨率提供了参考。
为了解决现有的高光谱超分辨率方法依赖于手工先验和数据驱动先验会导致参数选择困难或可解释性差的问题,采用一种基于自适应深度先验正则的高光谱图像超分辨率方法,进行了理论分析和实验验证。首先设计基于卷积神经网络的多阶段特征提取网络,提取退化图像的空间和光谱信息;其次将提取到的空-谱先验输入基于transformer模型的特征融合模块;然后自适应交互空域和谱域的互补信息,以捕获图像的全局先验特征;最后在退化模型中插入深度先验正则项,将超分辨率问题表述为一个优化问题,其解可以通过交替方向乘子法获得并降低求解复杂度。结果表明,所提出算法在信噪比均为35 dB时,重建信噪比分别达到了34.16 dB和29.35 dB, 比次优算法高出2.78 dB和2.17 dB,重建的高分辨率高光谱图像与其固有结构具有较高的一致性。该研究为综合利用手工先验和数据驱动先验增强高光谱图像空间分辨率提供了参考。


2024,
48(4):
521-526. doi: 10.7510/jgjs.issn.1001-3806.2024.04.009
摘要:
为了探究蓝莓早期腐烂后时间及温度变化对其造成的影响,采用高光谱成像技术结合偏最小二乘法和反向传播神经网络算法,进行了理论分析和实验验证,取得了偏最小二乘法和反向传播神经网络对蓝莓腐烂的时间模型和温度模型,并比较了这两种算法的建模效果。结果表明,随着时间的增加,蓝莓腐烂的情况会进一步恶化;伴随着温度的提升,蓝莓腐烂强度逐步提高;基于偏最小二乘法建立的模型效果更适合腐烂蓝莓的检测,腐烂蓝莓的协方差系数为0.131和0.149,相关系数为0.932和0.921,误差较小且相关性趋于一致。偏最小二乘法建立的模型可以较好地显示时间及温度对腐烂蓝莓的影响,为蓝莓表面微腐烂检测提供了一定的参考。
为了探究蓝莓早期腐烂后时间及温度变化对其造成的影响,采用高光谱成像技术结合偏最小二乘法和反向传播神经网络算法,进行了理论分析和实验验证,取得了偏最小二乘法和反向传播神经网络对蓝莓腐烂的时间模型和温度模型,并比较了这两种算法的建模效果。结果表明,随着时间的增加,蓝莓腐烂的情况会进一步恶化;伴随着温度的提升,蓝莓腐烂强度逐步提高;基于偏最小二乘法建立的模型效果更适合腐烂蓝莓的检测,腐烂蓝莓的协方差系数为0.131和0.149,相关系数为0.932和0.921,误差较小且相关性趋于一致。偏最小二乘法建立的模型可以较好地显示时间及温度对腐烂蓝莓的影响,为蓝莓表面微腐烂检测提供了一定的参考。










2024,
48(4):
534-541. doi: 10.7510/jgjs.issn.1001-3806.2024.04.011
摘要:
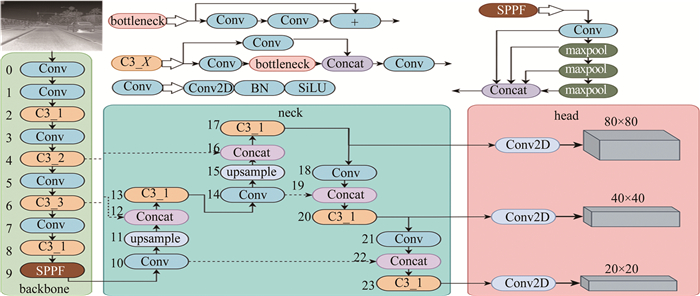
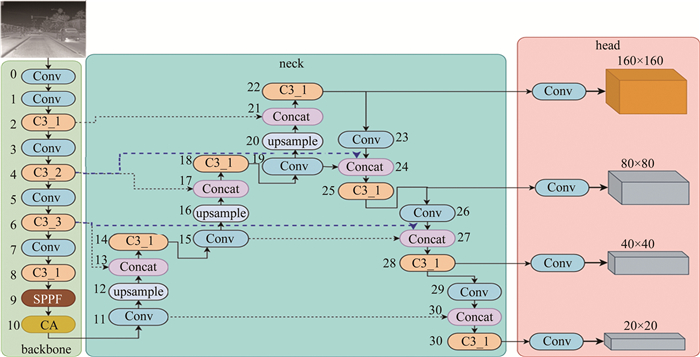
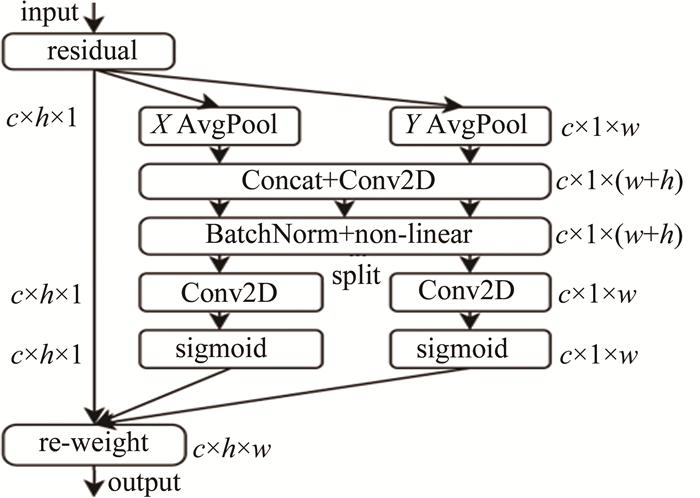
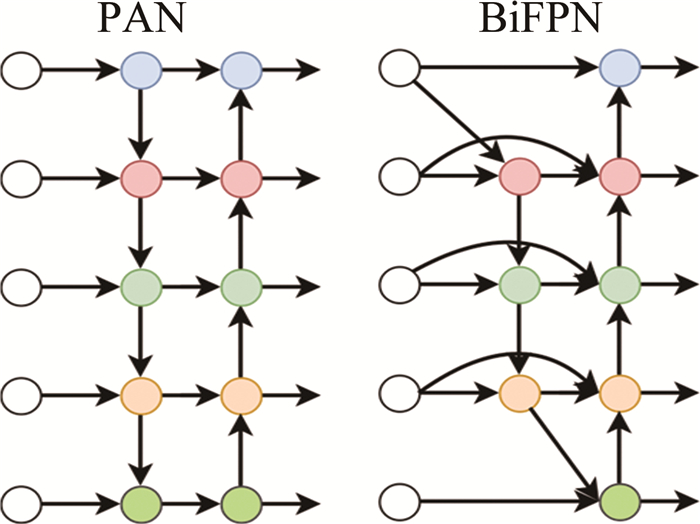
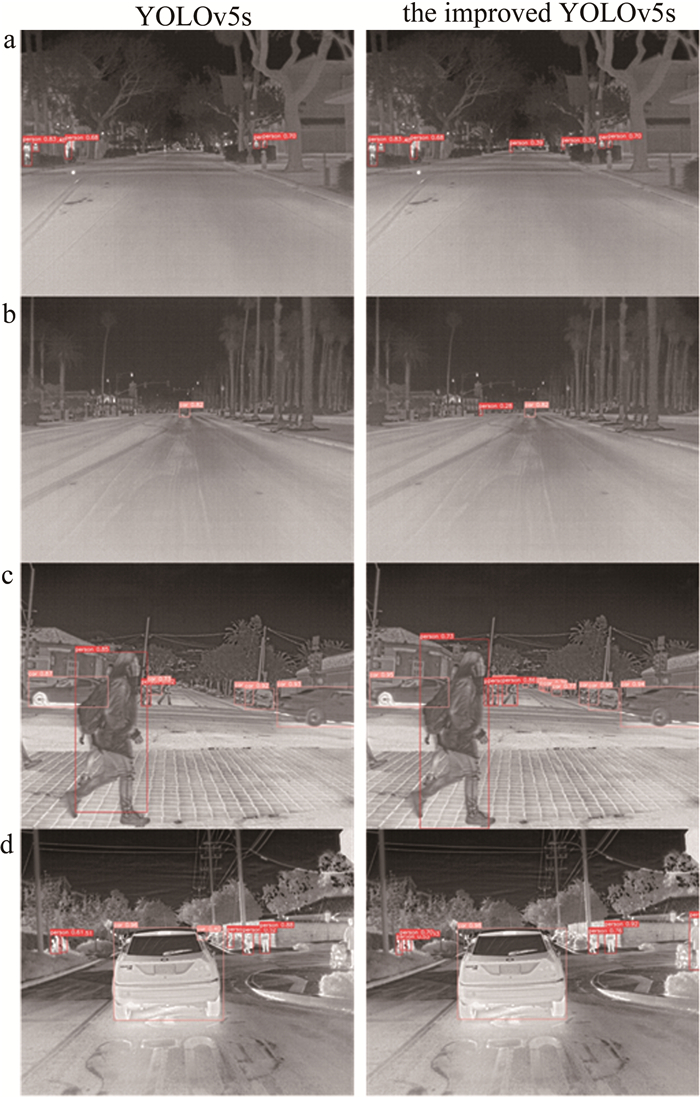
为了解决红外图像特征少、对比度不佳导致目标检测时精度低的问题,采用增加一个额外的预测特征层的方法,以提高原始YOLOv5在红外图像中的识别率;通过添加坐标注意力机制,优化红外目标强特征提取,提升检测准确度;再使用双向特征金字塔网络优化特征融合,增强模型表达能力,降低冗余计算;最后解决检测定位差和边界框回归任务中样本不平衡,采用focal-EIOU作为模型的边界框损失函数,提高收敛速度,并专注于高质量的锚框回归。结果表明,改进的YOLOv5在FLIR数据集上的准确率达到了85.3%,相比于原始网络模型提高了4.2%,具有较高的检测准确率。这一结果为在嵌入式设备上部署该软件提供了可行性。
为了解决红外图像特征少、对比度不佳导致目标检测时精度低的问题,采用增加一个额外的预测特征层的方法,以提高原始YOLOv5在红外图像中的识别率;通过添加坐标注意力机制,优化红外目标强特征提取,提升检测准确度;再使用双向特征金字塔网络优化特征融合,增强模型表达能力,降低冗余计算;最后解决检测定位差和边界框回归任务中样本不平衡,采用focal-EIOU作为模型的边界框损失函数,提高收敛速度,并专注于高质量的锚框回归。结果表明,改进的YOLOv5在FLIR数据集上的准确率达到了85.3%,相比于原始网络模型提高了4.2%,具有较高的检测准确率。这一结果为在嵌入式设备上部署该软件提供了可行性。
2024,
48(4):
556-564. doi: 10.7510/jgjs.issn.1001-3806.2024.04.014
摘要:
为了提高可见-近红外(VNIR)高光谱花生图像分类的准确率和减少分类检测的运算时间,提出了基于连续投影算法(SPA)融合粒子群算法优化后向传播神经网络(PSO-BP)的分类检测模型。利用高光谱成像系统采集了7个花生品种样本的VNIR光谱数据,并进行了背景分割和光谱信息的提取,去除受噪声和杂散光影响大的波段后,运用Savitzky-Golay卷积平滑对400 nm~900 nm范围的波长进行预处理;采用SPA降维及均方根误差值选择了25个特征波长,同时利用PSO-BP神经网络的初始权重和阈值,构建PSO-BP模型作为分类器进行了实验,取得了测试集识别准确率为98.7%、kappa系数为0.98及遗漏误差为3的数据。结果表明,相较4个对比方法构建的分类模型,该模型的准确率分别提高了2.1%、8.6%、3.9%和4.3%。该方法在基于高光谱成像的花生品种分类技术中具有很好的应用前景,为花生品种的高精度、快速无损分类提供了新思路。
为了提高可见-近红外(VNIR)高光谱花生图像分类的准确率和减少分类检测的运算时间,提出了基于连续投影算法(SPA)融合粒子群算法优化后向传播神经网络(PSO-BP)的分类检测模型。利用高光谱成像系统采集了7个花生品种样本的VNIR光谱数据,并进行了背景分割和光谱信息的提取,去除受噪声和杂散光影响大的波段后,运用Savitzky-Golay卷积平滑对400 nm~900 nm范围的波长进行预处理;采用SPA降维及均方根误差值选择了25个特征波长,同时利用PSO-BP神经网络的初始权重和阈值,构建PSO-BP模型作为分类器进行了实验,取得了测试集识别准确率为98.7%、kappa系数为0.98及遗漏误差为3的数据。结果表明,相较4个对比方法构建的分类模型,该模型的准确率分别提高了2.1%、8.6%、3.9%和4.3%。该方法在基于高光谱成像的花生品种分类技术中具有很好的应用前景,为花生品种的高精度、快速无损分类提供了新思路。















2024,
48(4):
608-612. doi: 10.7510/jgjs.issn.1001-3806.2024.04.022
摘要:
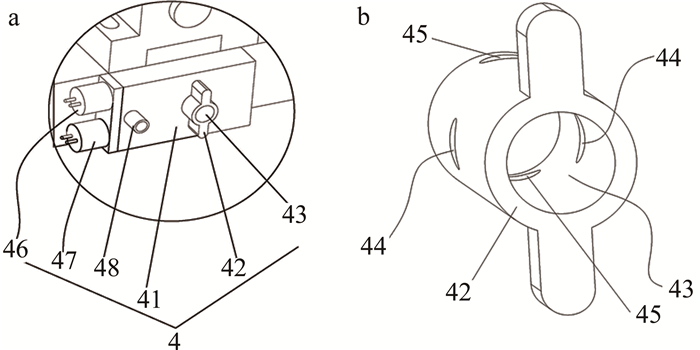
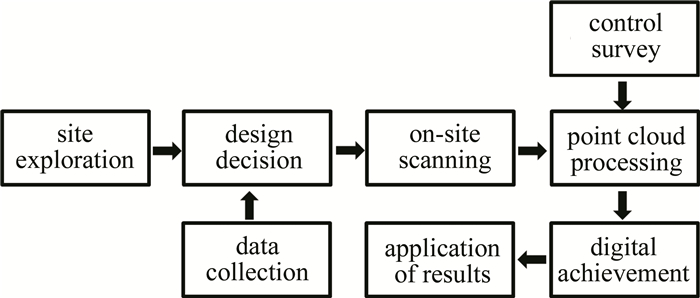
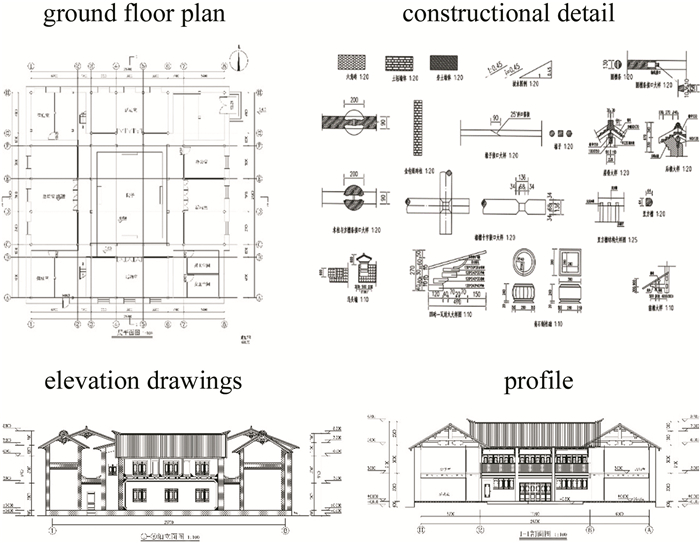
为了更好地将即时定位与地图构建(SLAM)3维激光扫描技术应用在历史建筑保护中,实现利用3维点云模型对历史建筑进行数字化保护,以云南白族历史建筑为研究对象,采用了SLAM 3维激光扫描技术获取历史建筑高精度点云模型,该技术不仅能快速地完成数据采集工作、提高历史建筑数字化保护工作的效率,还可以形成历史建筑丰富的数字化成果;通过对实验区数据的理论分析和实验验证,证明了SLAM 3维激光扫描技术在历史建筑数字化保护中的可行性。结果表明,距离中误差为0.004 m,点位中误差为0.037 m和0.021 m;SLAM 3维激光扫描技术能够快速、准确地完成历史建筑数据采集过程并形成高精度点云模型,基于该模型提取的平立剖面图能够达到相关规范精度要求。该研究为历史建筑数字化保护提供了一种新的思路和方法,有望在未来的应用中发挥更为积极的作用。
为了更好地将即时定位与地图构建(SLAM)3维激光扫描技术应用在历史建筑保护中,实现利用3维点云模型对历史建筑进行数字化保护,以云南白族历史建筑为研究对象,采用了SLAM 3维激光扫描技术获取历史建筑高精度点云模型,该技术不仅能快速地完成数据采集工作、提高历史建筑数字化保护工作的效率,还可以形成历史建筑丰富的数字化成果;通过对实验区数据的理论分析和实验验证,证明了SLAM 3维激光扫描技术在历史建筑数字化保护中的可行性。结果表明,距离中误差为0.004 m,点位中误差为0.037 m和0.021 m;SLAM 3维激光扫描技术能够快速、准确地完成历史建筑数据采集过程并形成高精度点云模型,基于该模型提取的平立剖面图能够达到相关规范精度要求。该研究为历史建筑数字化保护提供了一种新的思路和方法,有望在未来的应用中发挥更为积极的作用。


2024,
48(4):
470-476. doi: 10.7510/jgjs.issn.1001-3806.2024.04.003
摘要:
为了满足新能源汽车电池制造、航空航天高反射材料铜的焊接和金属3-D打印领域的应用需求,采用空间合束以及偏振合束方法,研制出基于150 W阵列式蓝光单元的500 W蓝光半导体激光模块。实现了快轴上发光单元内部的光束叠加、慢轴上多个发光单元交叉加密输出,消除发光死区,将4个独立发光单元的激光合束为一个方形光斑,增加功率密度而不影响光束质量;并研究了激光模块热效应与冷却特性,设计出激光模块稳定输出方案。结果表明,最终输出蓝光激光快轴发散角0.4°,慢轴发散角0.02°,发光功率501 W,整体效率81.3%,功率波动小于0.7%。本研究成果为进一步研制4 kW大功率蓝光半导体激光器提供了基本合束模块。
为了满足新能源汽车电池制造、航空航天高反射材料铜的焊接和金属3-D打印领域的应用需求,采用空间合束以及偏振合束方法,研制出基于150 W阵列式蓝光单元的500 W蓝光半导体激光模块。实现了快轴上发光单元内部的光束叠加、慢轴上多个发光单元交叉加密输出,消除发光死区,将4个独立发光单元的激光合束为一个方形光斑,增加功率密度而不影响光束质量;并研究了激光模块热效应与冷却特性,设计出激光模块稳定输出方案。结果表明,最终输出蓝光激光快轴发散角0.4°,慢轴发散角0.02°,发光功率501 W,整体效率81.3%,功率波动小于0.7%。本研究成果为进一步研制4 kW大功率蓝光半导体激光器提供了基本合束模块。










2024,
48(4):
499-504. doi: 10.7510/jgjs.issn.1001-3806.2024.04.007
摘要:
为了提高蓝光半导体激光器光束的均匀性,采用傅里叶光学理论建立匀光系统数学模型并进行理论分析,运用相关软件对匀光系统进行仿真模拟,搭建了一套基于微透镜阵列的蓝光匀光系统,利用该系统得到光斑均匀性为87.6%的匀化光斑。结果表明,匀化光斑的均匀性不仅与微透镜阵列子透镜的焦距和孔径相关,也与聚焦透镜的焦距相关,采用焦距为100 mm的菲涅耳透镜得到的匀化光斑均匀度要比焦距为80 mm的菲涅耳透镜得到的匀化光斑均匀度高约9.2%。该研究为具有较高集成度和较轻体积的蓝光光束匀光系统提供了理论和设计思路。
为了提高蓝光半导体激光器光束的均匀性,采用傅里叶光学理论建立匀光系统数学模型并进行理论分析,运用相关软件对匀光系统进行仿真模拟,搭建了一套基于微透镜阵列的蓝光匀光系统,利用该系统得到光斑均匀性为87.6%的匀化光斑。结果表明,匀化光斑的均匀性不仅与微透镜阵列子透镜的焦距和孔径相关,也与聚焦透镜的焦距相关,采用焦距为100 mm的菲涅耳透镜得到的匀化光斑均匀度要比焦距为80 mm的菲涅耳透镜得到的匀化光斑均匀度高约9.2%。该研究为具有较高集成度和较轻体积的蓝光光束匀光系统提供了理论和设计思路。











2024,
48(4):
572-577. doi: 10.7510/jgjs.issn.1001-3806.2024.04.016
摘要:
为了研究微片激光器的光回馈效应的调制方式对激光器光灵敏度的影响,采用不同调制电压、频率驱动压电陶瓷(PZT)来调谐微片激光器外腔的方法,观察光回馈条纹幅值和灵敏度的变化情况,并结合复合腔等效模型进行了数值仿真和分析。结果表明,增大PZT调制频率,使其越靠近激光器的弛豫振荡频率,光放大效果越明显,输出幅值和PZT调制频率具有相同变化趋势;PZT调制频率不变,将140 mA抽运电流调小至出光阈值电流约100 mA,弛豫振荡峰值会逐渐靠近PZT移频调制量,能主动放大回馈光,增益可高达105;光灵敏度与PZT移频量相对弛豫振荡峰值的距离有关,两者越接近,光灵敏度则越强;经PZT调制的激光回馈系统相对声光调制,有降低成本、易于调节的优势。该研究为联动调节抽运电流和PZT调制量获得幅值合适、噪声小的光回馈条纹提供了参考。
为了研究微片激光器的光回馈效应的调制方式对激光器光灵敏度的影响,采用不同调制电压、频率驱动压电陶瓷(PZT)来调谐微片激光器外腔的方法,观察光回馈条纹幅值和灵敏度的变化情况,并结合复合腔等效模型进行了数值仿真和分析。结果表明,增大PZT调制频率,使其越靠近激光器的弛豫振荡频率,光放大效果越明显,输出幅值和PZT调制频率具有相同变化趋势;PZT调制频率不变,将140 mA抽运电流调小至出光阈值电流约100 mA,弛豫振荡峰值会逐渐靠近PZT移频调制量,能主动放大回馈光,增益可高达105;光灵敏度与PZT移频量相对弛豫振荡峰值的距离有关,两者越接近,光灵敏度则越强;经PZT调制的激光回馈系统相对声光调制,有降低成本、易于调节的优势。该研究为联动调节抽运电流和PZT调制量获得幅值合适、噪声小的光回馈条纹提供了参考。










2024,
48(4):
584-589. doi: 10.7510/jgjs.issn.1001-3806.2024.04.018
摘要:
为了进一步优化小型化激光器的性能,在一般性原则的基础上设计了一款输出功率大于10 W、1030 nm高稳定性的小型化全光纤激光器壳体结构。壳体体积为220 mm×270 mm×75 mm,质量小于7 kg;壳体结构采用柔性支撑的减振设计,并可使激光器在温度-55 ℃~45 ℃的小型化平台下保持正常运行。利用有限元分析软件对激光器壳体进行了热分析与随机振动分析,按照设计图纸对小型化全光纤激光器样机进行了加工,并进行了实验验证。结果表明,激光器壳体在45 ℃下,激光器最热面温度为49.5 ℃,温升约为4.5 ℃,散热性能良好;在随机振动功率谱密度总均方根10.77 g的实验条件下,激光器最大3σ应力为171 MPa,随机振动响应均方根值仅为24.5 g,壳体结构力学性能良好;激光器壳体结构的散热性能以及力学性能完全满足设计要求,实验结果与仿真结果吻合度较高。该研究为小型化光纤激光器项目的具体实施提供了一定参考。
为了进一步优化小型化激光器的性能,在一般性原则的基础上设计了一款输出功率大于10 W、1030 nm高稳定性的小型化全光纤激光器壳体结构。壳体体积为220 mm×270 mm×75 mm,质量小于7 kg;壳体结构采用柔性支撑的减振设计,并可使激光器在温度-55 ℃~45 ℃的小型化平台下保持正常运行。利用有限元分析软件对激光器壳体进行了热分析与随机振动分析,按照设计图纸对小型化全光纤激光器样机进行了加工,并进行了实验验证。结果表明,激光器壳体在45 ℃下,激光器最热面温度为49.5 ℃,温升约为4.5 ℃,散热性能良好;在随机振动功率谱密度总均方根10.77 g的实验条件下,激光器最大3σ应力为171 MPa,随机振动响应均方根值仅为24.5 g,壳体结构力学性能良好;激光器壳体结构的散热性能以及力学性能完全满足设计要求,实验结果与仿真结果吻合度较高。该研究为小型化光纤激光器项目的具体实施提供了一定参考。











2024,
48(4):
505-520. doi: 10.7510/jgjs.issn.1001-3806.2024.04.008
摘要:
光纤技术的诞生使得信息传输速度显著提高,目前已经进入了光纤技术应用的全新阶段。在这个阶段中,聚合物光纤作为一种新型光纤备受关注,由于其材料的性质,比硅光纤更加柔软、轻便以及成本更低廉;同时,聚合物光纤的成型和处理方式也比硅光纤更加灵活,可以根据不同的需求和应用进行定制。随着制造和性能的不断改进,聚合物光纤在传输和传感领域都显示出了强大的潜力和多种应用的可能性,如光纤通信、物理研究、健康监测、生物医疗和环境监测等。介绍了聚合物光纤在上述领域的应用,总结了聚合物光纤在光纤通信和传感应用中的前景,最后指出了未来的研究方向。
光纤技术的诞生使得信息传输速度显著提高,目前已经进入了光纤技术应用的全新阶段。在这个阶段中,聚合物光纤作为一种新型光纤备受关注,由于其材料的性质,比硅光纤更加柔软、轻便以及成本更低廉;同时,聚合物光纤的成型和处理方式也比硅光纤更加灵活,可以根据不同的需求和应用进行定制。随着制造和性能的不断改进,聚合物光纤在传输和传感领域都显示出了强大的潜力和多种应用的可能性,如光纤通信、物理研究、健康监测、生物医疗和环境监测等。介绍了聚合物光纤在上述领域的应用,总结了聚合物光纤在光纤通信和传感应用中的前景,最后指出了未来的研究方向。









2024,
48(4):
578-583. doi: 10.7510/jgjs.issn.1001-3806.2024.04.017
摘要:
近红外扩散相关光谱(DCS)是一种先进的无创检测组织深层血流流速变化的动态光散射技术。为了解决光子相关器价格昂贵、灵活性差、应用局限、计算效率低的问题,采用将光子相关器软件化的方法,设计了一种近红外扩散相关谱检测系统。该系统以单纵模长相干激光器作为光源,采用单光子探测器探测散射光信号,用数字信号采集模块采集高速数字信号,并对数字脉冲信号进行计数,基于软件完成了对动态散射光斑光强归一化自相关的计算。结果表明,该系统计算出生物样品波动漫反射信号的时间平均强度自相关函数符合理论,验证了系统检测功能的可靠性;在客观评价指标方面,可成功区分不同的生物样品,并且能够分别体积分数差为1%的同种生物样品。该系统可以实时监测生物样品整体的光学特性和动态特性,具有体积小、成本低、灵活性好、可拓展性强的特点,为轻量化DCS检测系统的发展提供了一种新的解决方案。
近红外扩散相关光谱(DCS)是一种先进的无创检测组织深层血流流速变化的动态光散射技术。为了解决光子相关器价格昂贵、灵活性差、应用局限、计算效率低的问题,采用将光子相关器软件化的方法,设计了一种近红外扩散相关谱检测系统。该系统以单纵模长相干激光器作为光源,采用单光子探测器探测散射光信号,用数字信号采集模块采集高速数字信号,并对数字脉冲信号进行计数,基于软件完成了对动态散射光斑光强归一化自相关的计算。结果表明,该系统计算出生物样品波动漫反射信号的时间平均强度自相关函数符合理论,验证了系统检测功能的可靠性;在客观评价指标方面,可成功区分不同的生物样品,并且能够分别体积分数差为1%的同种生物样品。该系统可以实时监测生物样品整体的光学特性和动态特性,具有体积小、成本低、灵活性好、可拓展性强的特点,为轻量化DCS检测系统的发展提供了一种新的解决方案。









