 网站地图
网站地图



-
半主动激光制导武器由于具有制导精度高、抗干扰能力强、结构简单、成本低、通用性强等优势,一直在局部战争中占据重要地位,从20世纪60年代开始就得到了广泛的应用。国外的半主动激光制导武器的典型代表为[1]:美国的Paveway和俄罗斯的KAB-1500L激光制导炸弹;美国Hellfire、AGM-65E、法国AS-30L和俄罗斯X-25ML激光制导导弹;美国铜斑蛇、俄罗斯红土地、以色列火球等激光制导炮弹;以及美国BAE公司的AKPWS-Ⅱ[2]和洛克希德马丁公司的DAGR激光制导火箭弹等。
由半主动激光制导技术的原理可知,在激光制导导引头信息处理电路中,具有4个相互独立的数据采集通道,而由于通路上分立器件(电阻、电容、电感和放大器)的精度误差,以及数模转换过程中对模拟信号的量化误差,会导致4个采集通道的对相同输入信号的响应度不一致。该不一致性会致使导引头输出的俯仰、偏航两个方向的目标指向都存在一个偏移量,从而降低激光制导导弹(或者炸弹)的打击精度。传统的不一致性校正方法是在信息处理器中,对4个采集通道采用系数修正的方式进行校正。国外文献中未看到相关技术的论述,而国内仅参考文献[3]中论述了通路不一致性的校正方法,但是该方案中尚存在一些不足之处,在实际应用中较难实现。
本文中针对上述工程应用中对4个采集通道响应不一致性校正的实际需求进行了深入研究和探索,重点研究了信息处理处理电路中的增益控制电路,分析了其设计要点,并给出了一种增益控制电路的设计原理图,提出了一种基于该增益控制电路的通道间响应度不一致性的校正方法。该方法针对导弹(或者炸弹)实际飞行过程中的各个离散增益点,进行不一致性校正。经过线性区测试和仿真验证, 采用该方法校正后可明显提高制导精度。
-
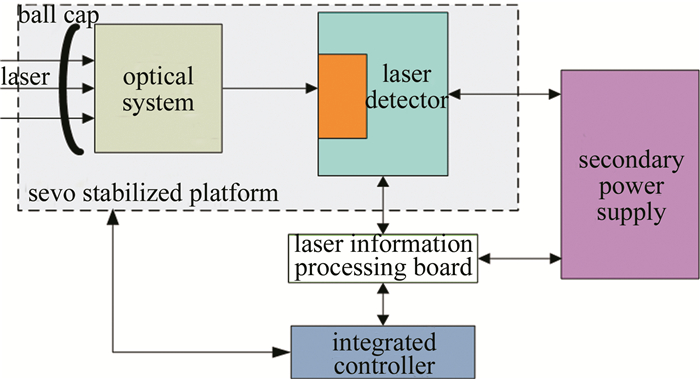
半主动激光制导武器系统由激光照射器和激光制导导弹或者炸弹组成,激光照射器独立于导弹之外,可由单兵地面手持照射目标,也可由机载照射吊舱由空中照射目标。在激光制导武器搜索、跟踪目标的过程中,接收激光照射器照射到目标上的漫反射回波,经光学系统会聚在四象限激光探测器光敏面上,形成光斑,通过计算四象限探测器上光斑重心的位置,得到光轴在俯仰、偏航两个方向上与目标的夹角,并发送给综合控制器,形成制导回路[4]。半主动激光制导武器系统的工作原理如图 1所示。
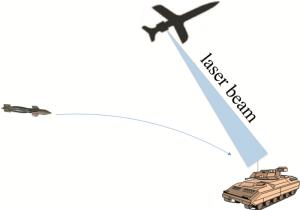
Figure 1. Schematic diagram of semi-active laser guided weapon system
平台式激光导引头主要由光学系统、四象限激光探测器、激光信息处理板、综合控制器和二次电源模块组成,如图 2所示。
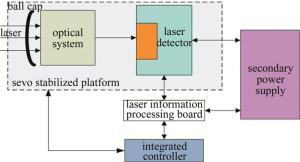
Figure 2. Block diagram of platform laser seeker
-
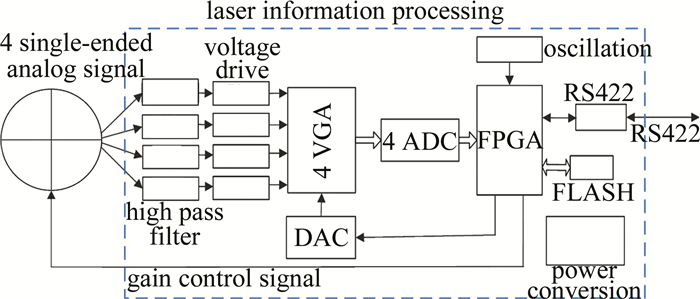
在激光制导导弹(或者炸弹)中,激光信息处理器的原理框图如图 3所示。以现场可编程门阵列(field-programmable gate array,FPGA)为核心处理器,为激光探测器提供控制信号,并将其输出的4路单端模拟信号经高通滤波和电压驱动后,送入可变增益放大器(variable gain amplifier, VGA)进行放大,再由模数转换器采样并送入FPGA,最终将处理结果通过RS422输出。
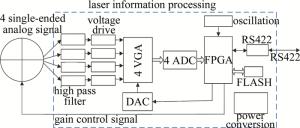
Figure 3. Schematic diagram of laser information processor
按照激光信号的传输路径和处理流程,可将影响激光制导寻的器测角精度的因素分为外部环境因素和系统内部因素[3]。其中外部环境因素主要为大气湍流引起测角误差[5-6]。系统内部因素主要包括探测器安装误差、探测器性能引起的误差以及激光信号处理电路导致的误差[3]。这些误差会导致导引头的线性度变差,从而降低激光导引头的制导精度和打击目标时的命中精度。下面主要讨论激光信息处理电路引起的制导误差。
假设UA,UB,UC,UD分别为入射光斑在激光探测器A, B, C, D 4个象限产生的光电压,由激光制导的基本原理可知,如果4个通道对漫反射激光的响应度是完全一致的,则导引头在俯仰和偏航方向相对光轴的偏差可由以下公式计算得到[4]:
$ \Delta x=\frac{\left(U_A+U_B\right)-\left(U_C+U_D\right)}{U_A+U_B+U_C+U_D} $
(1) $ \Delta y=\frac{\left(U_A+U_D\right)-\left(U_B+U_C\right)}{U_A+U_B+U_C+U_D} $
(2) 信息处理电路中导致采集通道响应存在差异的主要原因包括:(1)模拟信号调理通道,包括放大器和滤波器等环节中分立器件(放大器、电阻、电容和电感等)的误差造成的响应不一致性;(2)数模转换过程中对模拟信号的量化过程中导致的不一致性。
以上两个环节产生的响应不一致性,会导致4个采集通道对相同特性输入信号的响应度产生差异,从而致使根据(1)式、(2)式计算出来的光轴在俯仰、偏航两个方向上与目标的夹角存在一个固定的偏移量,最终降低激光制导导弹(或者炸弹)的打击精度。按照传统的不一致性校正方法,在信息处理器中,对4个采集通道采用系数修正的方式进行校正。假设以A路为基准,这时计算两个方向偏差的公式就变为:
$ \begin{gathered} \Delta x= \\ \frac{\left(U_A+k_B U_B\right)-\left(k_C U_C+k_D U_D\right)}{U_A+k_B U_B+k_C U_C+k_D U_D} \end{gathered} $
(3) $ \begin{gathered} \Delta y= \\ \frac{\left(U_A+k_D U_D\right)-\left(k_B U_B+k_C U_C\right)}{U_A+k_B U_B+k_C U_C+k_D U_D} \end{gathered} $
(4) 式中, kB, kC和kD分别是B, C, D 3个通道的校正系数。
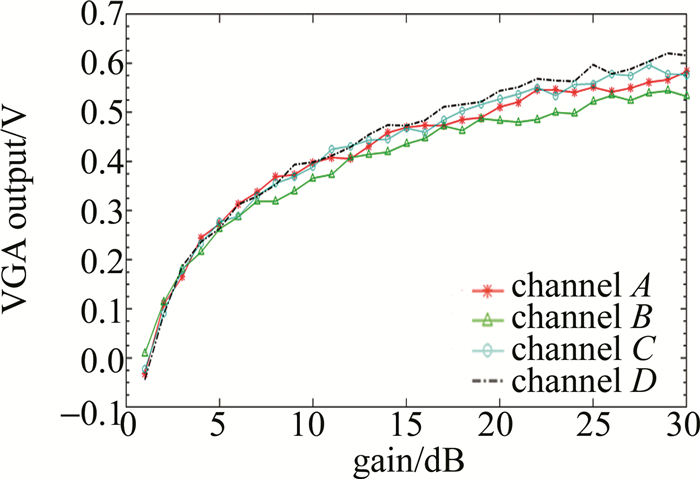
然而,(3)式和(4)式为理论计算方法,由于激光信息处理电路中,在导弹(或者炸弹)飞行过程中,需要根据接收激光能量的强弱,通过VGA电路动态调整放大电路的增益,而在不同增益点,4个信号通道的响应也存在差异。图 4为未经过校正的4个采集通道在不同增益点的响应不一致性曲线。从图中可以看出,在不同增益点,4个通道的响应存在明显差异,所以要在全接收能量范围都保持4个采集通道具有较好的响应一致性,就需要对不同增益点分别计算一组校正系数,而对于采用FPGA作为处理器的系统,(3)式和(4)式中的小数乘法运算不仅耗费逻辑资源,还会增加处理延时,所以在真正的工程实践中很难实现。
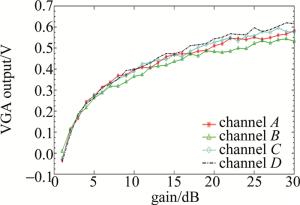
Figure 4. Response inconsistency curves for four channels at different VGA gain points
经过验证,在FPGA程序中每增加一个16位定点乘法器,综合后,占用的逻辑资源增加0.1%,功耗增加约0.04%,而增加的处理延时约为200ns(假设输入时钟频率为150MHz),所以如果在每个离散增益点都采用传统的系数校正方法进行校正,产生的逻辑资源、功耗和处理延时的开销对系统应用极为不利。
-
本文中研究的不一致性校正方法是基于接收电路中的自动增益控制电路,所以首先讨论自动增益控制电路的原理及其设计要点。在半主动激光制导武器中采用的四象限激光探测器,其动态范围有限(一般是设置两级衰减,动态总共为50dB~125dB),而在导弹(或者炸弹)从发射到命中目标的整个飞行过程中,接收到的激光能量的动态范围远远超过探测器的动态范围,所以必须在信息处理电路中增加可变增益放大电路,根据接收到的激光回波强弱,动态调整放大倍数,以使得信号幅度始终处于最佳采集范围,从而保证在导弹飞行过程中,可以在接收到的全信号幅度范围内实现高精度制导。
在设计自动增益放大电路时需重点考虑以下几个因素:(1)输入信号幅度范围;(2)系统需要的动态范围。
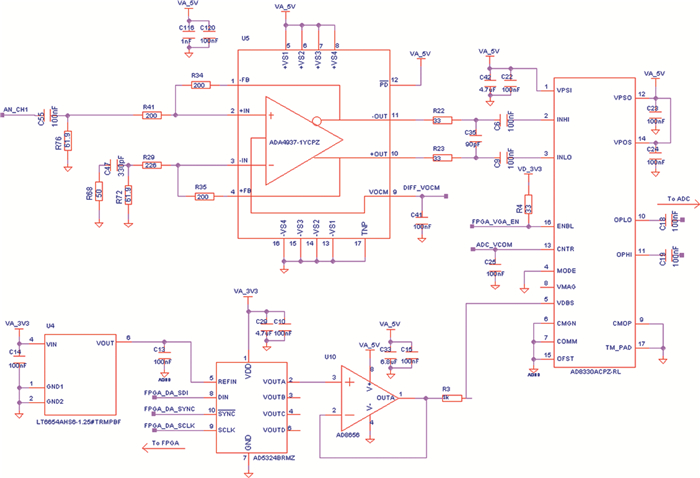
本文中设计的自动增益控制电路,输入模拟信号幅度范围为0V~5V,系统所需的自动增益控制电路的动态范围不小于40dB。本文中研究的不一致性校正方法,对增益控制电路有特殊的要求,即在设计VGA电路时必须采用单通道VGA芯片,以避免双路和4路VGA芯片片内通道间存在的增益不一致性对校正结果的影响。模拟调理电路和VGA电路的原理图如图 5所示。在本方案中,差分驱动放大器采用ADI公司的ADA4937, VGA芯片采用ADI公司的AD8330,数字模拟转换器(digital-to-analog converter,DAC)芯片采用ADI公司的AD5324。四象限激光探测器输出的4路单端模拟信号经高通滤波后,由ADA4937构成的差分驱动电路转换成差分信号后,送入由AD8330构成的VGA电路进行放大,使信号幅度始终处于模拟数字转换器(analog-to-digital converter,ADC)的最佳采集范围。DAC芯片AD5324用于调节VGA的增益。
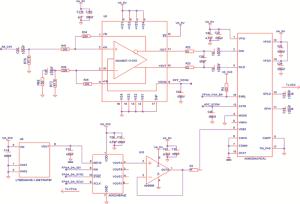
Figure 5. Schematic design of gain control circuit
为了研究基于增益放大电路的不一致性校正方法,本方案中选用的VGA芯片AD8330属于单通道模拟控制VGA,即由输入到其增益控制管脚VDBS的模拟电压来调节VGA的增益,VGA增益与输入的模拟控制电压是线性关系,当输入到VDBS管脚的电压为(0~1.5)V时,对应的VGA电路的增益调节范围为(0~50)dB,即调整率为30mV/dB,输入增益控制电压与VGA增益的关系曲线如图 6所示。
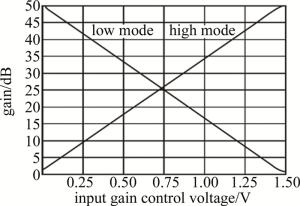
Figure 6. Input gain control voltage vs. VGA gain
为了适应本文中提出的基于增益控制电路的不一致性校正方法,并考虑到信息处理板的体积、功耗以及成本等因素,本方案中采用四输出通道的12bit DAC(ADI公司的AD5324)实现VGA的增益调节,该芯片的数据和控制信号输入采用串行外设接口(serial peripheral interface,SPI)接口,其独立的4路输出电压,分别用于调整4路VGA的增益。在实际使用中,通过FPGA设置送往DAC的12bit数据,改变DAC输出的4路模拟电压值,从而达到调节VGA增益的目的。
-
有些文献中提出了4个通道不一致性校正方法[3],但是都是采用基于传统的系数修正的方式,而且没有讨论通道不一致性和VGA增益的关系。在实际应用中,在导弹(或者炸弹)飞行的过程中,根据接收到激光能量的强弱,动态调整VGA增益,但是调节的过程中并不需要连续调节VGA电路增益,而是使用有限的固定增益点,例如3倍、5倍、9倍和12倍等等,如果针对这些固定增益点进行不一致性校正,即可满足系统对制导精度的要求。
本文中提出的不一致性校正方法的思路是基于第3节中的增益控制电路,针对在导弹(或者炸弹)从发射到命中目标的整个飞行过程中设置的各个离散增益点,给信息处理电路的4个采集通道输入4路参量完全相同的正弦波(固定频率为5MHz,根据VGA增益的大小设置相应的幅度),根据要达到的响应一致性范围,动态调整VGA的增益,达到一致性校正的目的。
需要设计专门的VGA增益一致性校正、测试软件,通过信号发生器给激光信息处理板输入4路相同的单端模拟信号,测试软件给FPGA寄存器下发VGA增益配置指令,设定需要测试的增益值,然后下发峰值检测指令,获取输出的4路ADC通道采集到的峰值,然后对比4个通道峰值,以峰值最小的一个通道作为基准,根据要达到的一致性范围,微调用于调整VGA增益的DAC的数据。校正软件的校正流程如图 7所示。

Figure 7. Calibration software calibration process
校正过程中,通过校正软件将满足增益一致性要求的用于调节VGA的4路DAC数据存储在FLASH (一种非易失性内存)特定的存储单元中,在实际应用中,根据系统选定的特定增益点,从相应存储地址对应的FLASH存储单元中读取对应的用于产生DAC的4路输出电压的12bit数据,实时地利用该校正数据产生4路模拟电压,将4路VGA增益设置成为一致性较好的状态,从而起到不一致性校正的目的。
实际应用时,利用查表法进行不一致校正,假设A, B, C, D分别代表四象限激光探测器的4个象限对应的4路信号,如果是以A路信号为基准,在3倍(9.5dB)增益时,对B路信号进行校正,假设对VGA配置增益为3倍(9.5dB)增益时,DAC的12bit数据为D0,校正的目标偏差范围为σ。通过校正软件测试B路信号与A路信号峰值的差值为Δx,假设Δx>σ,则以十进制数1为步进将送往DAC的B路模拟电压对应的12bit数据增加致D0+1,写入DAC,重新设定VGA增益后,再重复上述过程,直至到第N次,ΔxN < σ, 将此时的12bit数据D0+N写入FLASH相应的存储单元中,作为B路信号的校正数据,在实际应用中,到接收到的激光能量与3倍增益匹配时,从FLASH相应的存储单元中读出该校正数据,并以此设置VGA增益。对C路和D路信号重复上述校正过程,最终可使得4路信号的一致性都在要求的σ范围内,从而达到一致性校正的目的。
-
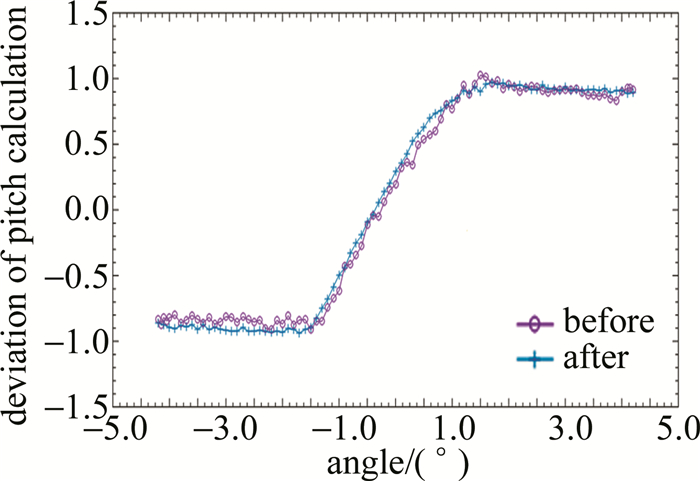
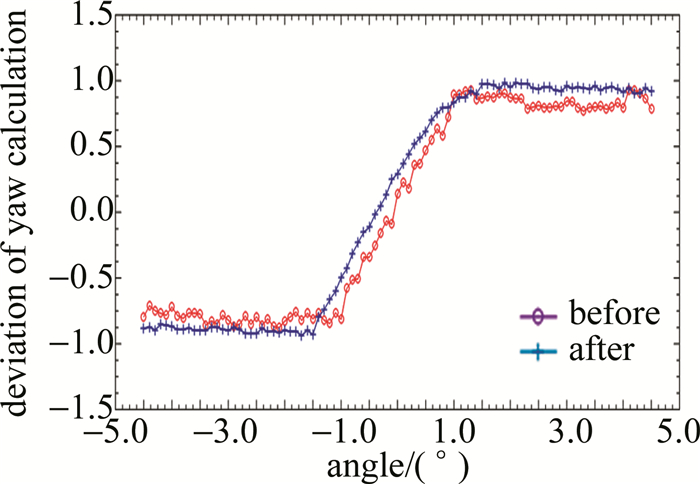
对于激光制导导引头而言,线性区是衡量其制导性能的一项重要指标,线性区曲线越是接近于直线,则表明其制导精度越高[7-10]。为了验证该校正方法的效果,对一个视场范围为±4°的激光导引头进行校正前后线性区的测试,测试结果如图 8和图 9所示。对比图中的线性区曲线可以看出,经校正后的线性区曲线更接近于直线,表明其线性度越好,测角精度更高,对于伺服平台而言,可明显提高控制精度。
Figure 8. Calibration curve of horizontal direction linear area
Figure 9. Calibration curve of azimuth direction linear area
一般采用圆概率偏差(circular error probable,CEP) 描述命中精度[11-12]。为了更加充分地验证本文中提出的不一致性校正方法对制导精度的影响,通过仿真进行了验证,采用该校正方法分别进行了3次仿真,CEP统计见表 1。在仿真过程中,为了排除信噪比变化对仿真结果产生的影响,使激光目标模拟器的能量保持恒定,从而保证信息处理电路的VGA处于相同的增益点。
Table 1. Statistical table of miss distance in semi-physical simulation
CEP before correction/m CEP after correction/m the first time 0.45 0.16 the second time 0.38 0.21 the third time 0.41 0.20 由于本文中提出的校正方法,针对实际使用的各离散增益点,对4个采集通道的输出响应进行精确校正,从而最大程度地减小了导引头输出的俯仰、偏航两个方向上与目标夹角的偏移量,最终达到提高制导精度的目的。
通过表中数据可以看出,校正后可以将CEP数值降低约50%, 理论上可以明显提高制导精度。
-
针对半主动激光制导导引头中对4个采集通道响应不一致性校正的实际需求,进行了深入研究和探索,重点研究了信息处理处理电路中的增益控制电路,分析了其设计要点,并给出了一种增益控制电路的设计原理图,提出了一种基于该增益控制电路的通道间响应度不一致性校正方法,该方法针对导弹(或者炸弹)实际飞行过程中的各个离散增益点,进行不一致性校正。通过校正前后实测的线性区标定曲线和半实物仿真脱靶量的对比,验证了该校正方法的效果。该校正方法具有校正效率高、校正精度高、资源开销低和易实现的优点,在实际工程应用中有较强的实用价值。
基于增益控制电路的响应不一致性校正方法
Correction method of response inconsistency based on gain control circuit
-
摘要: 为了研究半主动激光制导导引头信息处理电路中,4个采集通道响应不一致性导致的制导精度降低的问题,对造成采集通道间响应度存在差异的原因进行了理论分析和研究,研究了信息处理电路中的增益控制电路,分析了其设计要点,并给出了一种增益控制电路的设计原理图。采用一种基于该增益控制电路的通道间响应度不一致性校正方法,针对导弹(或者炸弹)实际飞行过程中使用的各个离散增益点,进行了不一致性校正;通过对比校正前后的线性区曲线和半实物仿真数据,验证了该校正方法的有益效果。结果表明,利用该校正方法校正后,导引头线性区曲线精度更高,并且可以将半实物仿真圆概率偏差数值降低约50%。该研究为提高半主动激光制导精度提供了一种有效的方法。Abstract: In order to study the problem of the guidance accuracy reduction caused by the inconsistency of the four acquisition channels in the information processing circuit of the semi-active laser guidance seeker, the reason of the difference of the response between the sampling channels was analyzed and studied. The gain control circuit in the information processing circuit was studied. The key points of the design were analyzed, and the design principle of a gain control circuit was given. An inter-channel response inconsistency correction method based on the gain control circuit was used to correct the inconsistency of discrete gain points used in the actual flight of a missile (or a bomb). The effectiveness of the correction method was verified by comparing the linear curve before and after correction with the simulation data of hardware-in-the-loop. The experimental results show that the linear circular error probable (CEP) of the seeker is more accurate and the CEP of the semi-physical simulation can be reduced by about 50%. This study provides an effective method for improving the precision of semi-active laser guidance.
-
Figure 4. Response inconsistency curves for four channels at different VGA gain points
Table 1. Statistical table of miss distance in semi-physical simulation
CEP before correction/m CEP after correction/m the first time 0.45 0.16 the second time 0.38 0.21 the third time 0.41 0.20  下载: 导出CSV
下载: 导出CSV
-
[1] WANG Q, MU X H, LU G E. Development status and trend of US mi-litary guided ammunition[J]. Winged Missiles Journal, 2015, 12(8): 12-17(in Chinese). [2] CUI P, FAN Zh F, XU J Q, et al. Technical line and enlightenment of British BAE's advanced precision kill weapon system[J]. Winged Missiles Journal, 2016, 32(5): 12-16(in Chinese). [3] GAO S Y, LIU H, ZHU M Ch, et al. Analysis and optimization of angle measurement accuracy of strap-down laser semi-active guidance seeker[J]. Infrared and Laser Engineering, 2015, 44(7): 2169-2174(in Chinese). [4] CHU Zh F, WANG D F, WANG J F, et al. A Laser seeker jaming strategy based on wave gate decoy[J]. Laser Technology, 2016, 40(6): 779-781(in Chinese). [5] CAO G H, XU H, SU Ch Zh. Effects of atmospheric turbulence on the laser alignment of a shaft[J]. Acta Armamentarii, 2005, 26(3): 327-329(in Chinese). [6] ZHAO X, TONG Sh F. Atmospheric turbulence effect on detecting spot of four-quadrant detector[J]. Infrared and Laser Engineering, 2010, 39(6): 1147-1151(in Chinese). [7] WEI Zh, HE Zh, XIANG J Zh, et al. Laser pulse peak estimation based on photon capture mode of quadrant photodetector[J]. Optik, 2016, 127(21): 10808-10816. [8] ZWECK J, SCHWARZHUBER F, WILD J, et al. On detector linearity and precision of beam shift detection for quantitative differential phase contrast applications[J]. Ultramicroscopy, 2016, 168(17): 53-64. [9] ZHANG X, DU Zh Y, QIAO Y F, et al. Study on linear field of strapdown semi-active laser seeker[J]. Chinese Optics, 2015, 8(3): 415-421(in Chinese). doi: 10.3788/co.20150803.0415 [10] FERRARO M S, RABINOVICH W S, CLARK W R, et al. Impact ionization engineered avalanche photodiode arrays for free-space optical communication[J]. Optical Engenering, 2016, 55(11): 1116091. [11] WU H L, JIA H G, WEI Q, et al. Optimization of angle increments in tracking loop for roll-pitch seekers[J]. Optics and Precision Engineering, 2014, 22(10): 2787-2795(in Chinese). doi: 10.3788/OPE.20142210.2787 [12] WANG Y K, ZHENG Q, JI Sh. Research on synthetic line-of-sight method for laser strapdown seeker based on semi-physical simulation[J]. Laser and Infrared, 2018, 48(10): 1278-1282(in Chinese). -

 点击查看大图
点击查看大图
图(9) / 表(1)
计量
- 文章访问数: 7654
- HTML全文浏览量: 6129
- PDF下载量: 22
- 被引次数: 0
