 网站地图
网站地图









-
大气中有毒有害气体主要产生于能源、化工、冶金、纺织、制药、垃圾焚烧的排放,以及出于某种目的而人为制造或意外产生的。大气中有毒有害气体由有毒化学及生物气溶胶气体,及可燃性气体等构成,主要分布于近地面,具有分布广、受环境因素影响大等特点,对人类生产活动及生活质量等造成较大的影响。其伴随人类文明进步而产生,长期存在,并随着某些国家、地区及团体利益的变化而加剧,成为世界各国面临的一个大问题。有毒有害气体能使人、动物、植物致病或死亡,若被恐怖分子掌握,一旦在空气中传播开来,很可能造成社会的恐慌。因此,结合现代技术手段,建立对这类物质的远/近程、地/空/天多层次立体监测,具有重要现实意义[1-3]。
作为一种主动遥感技术和工具,激光雷达在遥感探测的高度、空间分辨率、时间上连续监测和测量精度上具有独特的优势,尤其在大气探测方面取得了卓越的发展。目前,实现远距离探测的激光雷达技术主要包括后向散射雷达(Mie雷达)、差分吸收激光雷达技术(differential absorption lidar,DIAL)[4]、喇曼光谱技术、可调谐半导体激光吸收技术(tune diode laser absorption spectroscopy,TDLAS)、激光诱导荧光技术(laser induced fluorescence,LIF)等。其中,DIAL因具有探测距离远、灵敏度高、响应时间快等特点,可用于大范围大气有毒有害气体的遥感监测[5-6],成为近年来激光遥测技术发展的重点。
本文中分析了差分吸收激光雷达大气探测原理,介绍了该技术的最新发展成果及应用,并在此基础上总结了未来差分吸收激光雷达技术用于大气有毒有害气体探测的发展趋势及研究方向。
-
差分吸收激光雷达利用气体的特征吸收谱来对大气有毒有害气体进行远距离探测。绝大多数的有毒有害气体,在5μm~12μm的红外波段都具有非常典型的吸收谱带(见图 1[7])。差分吸收激光雷达工作时,将激光器的激光输出调谐到这些波段,通过测量气体对某些波长激光的吸收强度,来识别所测量的气体的种类、浓度、分布等特征。如图 2所示[8],差分吸收激光雷达采用多台激光器或一台可调谐激光器同时或在一定时间间隔内(大气“冻结”时间内,毫秒量级)沿同一路径发出至少两种特定波长的光束,其中一个波长称为共振波长λon,其波长位于待测气体的吸收谱带内相邻的特征吸收峰位置(吸收截面为σon);而另一波长称为非共振波长λoff,其波长在待测气体吸收谱带之外的吸收谷位置(吸收截面σoff)。待测气体浓度由激光雷达方程可得,如下式所示[9]:
$ \begin{array}{*{20}{c}} {C(R) = \underbrace {\frac{1}{{2\left( {{\sigma _{{\rm{on}}}} - {\sigma _{{\rm{off}}}}} \right)\Delta R}}\ln \left[ {\frac{{{P_{{\rm{off}}}}\left( {{\lambda _{{\rm{off}}}}, R} \right)}}{{{P_{{\rm{on}}}}\left( {{\lambda _{{\rm{on}}}}, R} \right)}}} \right]}_A - }\\ \begin{array}{l} \underbrace {\frac{1}{{2\left( {{\sigma _{{\rm{on}}}} - {\sigma _{{\rm{off}}}}} \right)\Delta R}}\ln \left[ {\frac{{{\beta _{{\rm{off}}}}\left( {{\lambda _{{\rm{off}}}}, R} \right)}}{{{\beta _{{\rm{on}}}}\left( {{\lambda _{{\rm{on}}}}, R} \right)}}} \right]}_B - \\ \;\;\;\;\;\;\;\;\underbrace {\frac{{\kappa \left( {{\lambda _{{\rm{on}}}}, R} \right) - \kappa \left( {{\lambda _{{\rm{off}}}}, R} \right)}}{{\left( {{\sigma _{{\rm{on}}}} - {\sigma _{{\rm{off}}}}} \right)}}}_C \end{array} \end{array} $
(1) 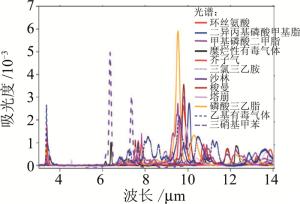
图 1 典型有毒有害气体的吸收谱
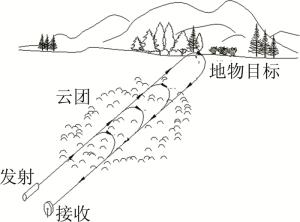
图 2 差分吸收激光雷达技术的基本原理示意图
式中,Pon(λon, R), Poff(λoff, R)分别是发射波长为λon, λoff激光所测得的归一化功率; R是探测待测气体的体积单元所对应距离; ΔR为距离分辨率; βon(λon, R), βoff(λoff, R)分别为发射波长为λon, λoff激光引起的大气后向散射系数; κ(λon, R), κ(λoff, R)分别为发射波长λon, λoff激光穿过气溶胶引起的消光系数。由于多个激光束几乎是沿同一传输路径传输、吸收、散射、反射,并有同一探测接收系统采集。因此,采用差分吸收激光技术从理论上可消除大气中其它气体分子和气溶胶的衰减、大气仪器参量以及大气条件局部变化而所引起的背景干扰及激光雷达系统的系统误差对探测精度的影响,通常可以认为B和C取为0。
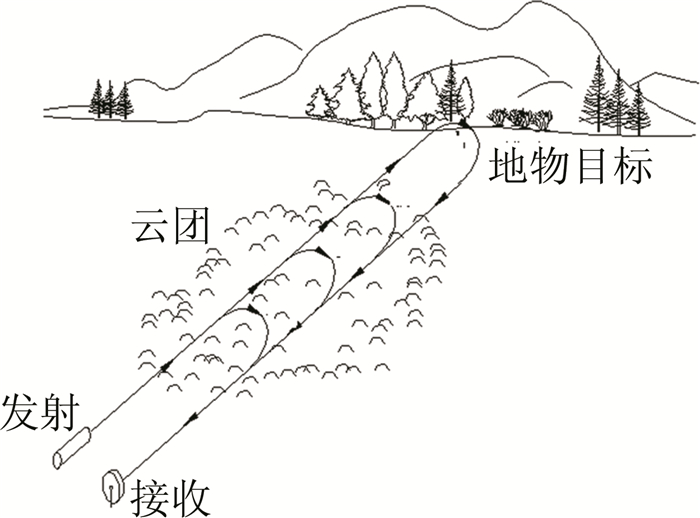
差分吸收激光雷达从工作波段可分为基于非倍频和倍频的技术方式,从探测方式上可分为相干探测方式和直接探测方式,从工作方式上可分为距离分辨差分吸收激光雷达(range resolved DIAL,RR DIAL)和长程差分吸收激光雷达(concentration-path length DIAL,CL DIAL),其原理如图 3所示[9]。
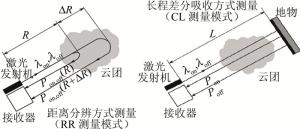
图 3 DIAL两种模式工作原理图
采用RR模式差分吸收激光雷达探测到物质在各个距离位置的浓度值经过理想简化后如下式所示:
$ \begin{array}{c} C(R)=\frac{-1}{2\left(\sigma_{\text {on }}-\sigma_{\text {off }}\right) \Delta R} \cdot \\ \left\{\ln \left[\frac{P\left(\lambda_{\text {on }}, R\right)}{P\left(\lambda_{\text {on }}, R+\Delta R\right)}\right]-\ln \left[\frac{P\left(\lambda_{\text {off }}, R\right)}{P\left(\lambda_{\text {off }}, R+\Delta R\right)}\right]\right\} \end{array} $
(2) 式中, Pon, off(R)代表共振吸收波长为λon、非共振吸收波长λoff的激光从距离R处收到回波功率P(λon, R)和P(λoff, R),Pon, off(R+ΔR)代表波长λon、波长λoff激光从距离R+ΔR处收到回波功率P(λon, R+ΔR)和P(λoff, R+ΔR),σon和σoff是对应的待测气体吸收截面(σoff相对较小),R是探测待测气体的体积单元所对应距离,ΔR是距离分辨率[10]。采用该种模式工作时无法直接获得物质的距离信息,系统结构相对简单,单元技术成熟,并且无需地物目标配合,直接对气溶胶云团进行测量。其测量结果直接为物质在各个距离位置的浓度值,可获得物质的3维浓度影像信息,实现距离分辨,但是该方法对激光器及探测系统要求较高。
采用CL模式差分吸收激光雷达探测气体浓度经过变换和简化后如下式所示[11]:
$ C=\frac{1}{2\left(\alpha_{\mathrm{on}}-\alpha_{\mathrm{off}}\right) L} \cdot \ln \left(\frac{P_{\mathrm{off}}}{P_{\mathrm{on}}}\right) $
(3) 式中, Pon和Poff分别为接收到共振吸收波长λon、非共振吸收波长λoff激光经过气溶胶云团发射地物目标的归一化回波功率,αon和αoff是对应的待测气体吸收系数(αoff相对较小),L为穿过气溶胶云团的光路的长度[12]。该模式差分吸收激光雷达主要特点是作用距离远,可到数十千米甚至更远,是机载及星载差分吸收激光雷达系统的首选方案,该模式需地物配合目标,适合地基及空中对近地面有毒有害气体测量。
-
绝大多数大气有毒有害气体的特征吸收峰主要位于中、长红外波段(2μm~14μm),该波段为有毒有害气体遥测的主要工作波段。二氧化碳(CO2)激光器在早期的有毒有害气体激光遥测领域,几乎是唯一可选的光源。但是,CO2激光器可调谐性仅限于9.2μm~10.7μm波段中固定数量的谱线,降低了识别更多有毒有害气体的潜力[13]。近年来,随着光学参量振荡(optical parametric oscillation,OPO)固体激光器、量子级联激光器(quantum cascade laser,QCL)、光纤激光器的发展,逐步应用到DIAL系统中,推动了差分吸收激光雷达技术发展。图 4中对各种中红外光源进行了比较[14]。表 1中对激光器技术在DIAL应用的优缺点进行了比较。CO2, CO等气体激光器技术成熟、能量大,但调谐范围窄、体积大;差频产生(difference frequency generation,DFG)或OPO产生的波长覆盖范围较宽,但调谐速度慢,是未来远程遥测光源的一个重要方向;中长波QCL半导体激光器窄线宽、高重频、体积小,但能量低,是中近程及小型化装备的重要光源。
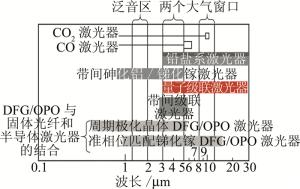
图 4 近红外和中红外各相干源波长覆盖率的比较示意图
表 1 激光器技术在DIAL应用优缺点比较[13]
优点 缺点 CO2差分吸收激光雷达 技术成熟,多种商业产品 调谐范围窄,体积大 QCL差分吸收激光雷达 窄线宽,高重频,体积小 能量低 OPO差分吸收激光雷达 波长覆盖范围较宽 调谐速度慢 -
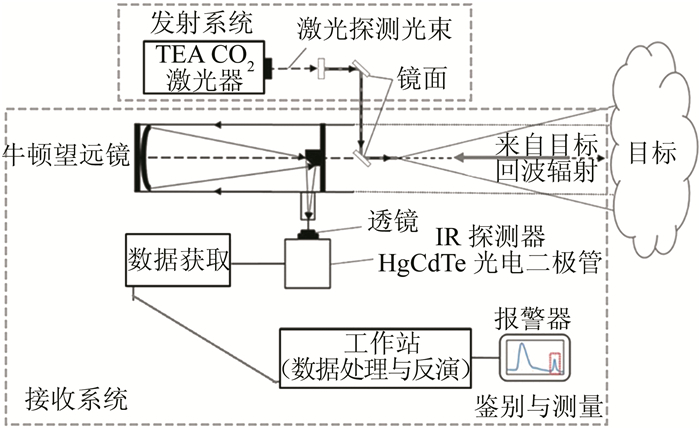
20世纪50年代,美国首先提出差分吸收化学气体远程报警雷达系统的设想。1965年,美国Edgewood研究发展工程中心发表了几种主要化学有毒有害气相的定量光谱,有些数据一直沿用至今。由于绝大多数的化学有毒有害气体都只在长波红外波段有特征光谱,与CO2激光器的工作频段恰好重合。因此,传统DIAL系统大多采用CO2激光器作为光源,可分为采用两台或多台非倍频的CO2激光器的DIAL系统和采用单台非倍频的CO2激光器的DIAL系统。图 5为一个简单、紧凑型CO2 DIAL系统原理示意图。该系统由一个小型横向激励高气压(transversely excited atmospheric,TEA)CO2激光器作为发射机和一个商用牛顿望远镜和碲镉汞(HgCdTe)红外光电二极管组成的接收设备,接收信号通过模数转换和数字信号处理,完成对大气气体的遥测[15]。
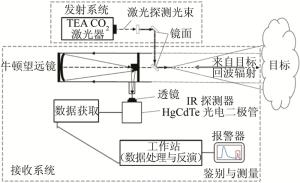
图 5 CO2 DIAL系统原理示意图
鉴于CO2 DIAL系统优越性和广泛的应用前景,20世纪70年代开始成为国内外研究热点。20世纪90年代,CO2 DIAL系统逐渐成熟,部分开始装备应用。典型应用如:美国的野猫化学侦察车,俄罗斯型号为KDKhR-1N的化学侦查装甲车系统多功能激光雷达侦察车(multi wave mobile lidar complex, MLC),斯洛伐克的型号为Falcon 4GS的DD-CW-A/S化学侦测仪器[6]。国外典型远程遥测差分吸收激光雷达产品情况见表 2。
表 2 国外典型CO2 DIAL产品
年份 名称 主要技术参量 附加说明 1997年 美国的野猫化学侦察车 有效探测距离:20km~40km 可调谐TEA CO2激光器直接探测 1999年 美国CP LA-BSDS 有效探测距离:3km~50km多种生化物质检测 直接探测/外差探测 2000年 俄罗斯MLC 有效探测最大距离:15km多种生化物质检测 可调谐激光器外差探测 2015年 斯洛伐克Falcon 4GS 有效探测最大距离:5km超过30种生化物质及污染物的遥测识别 两个可调谐TEA CO2激光器直接探测 1997年~2001年,由Raytheon电子系统公司、美国Edgewood研究发展工程中心和美国陆军夜视与电子传感器董事会等单位联合研制了美国的“野猫”化学探测系统。该系统的目标是对约20km~40km量级的远程化学有毒有害气体进行探测与识别(CL模式),并能在5km范围进行距离分辨(RR模式)。该探测系统的发射器为一台波长可调谐TEA CO2激光器,在100Hz时所有4个谱区支线均能输出1J/脉冲以上激光脉冲(100ns),激光波长范围为9.3μm~10.7μm。系统可通过对TEA CO2激光倍频技术(约350mJ)及OPO(约30mJ),来探测吸收特性位于普通激光发射波段之外的化学有毒有害气体。系统接收天线为直径为60cm的Cassegrain天线。探测器采用两元的HgCdTe探测器。扫描单元位于系统顶部,可升降。系统在工作时露出,进行半球空间扫描,采用两通道12位高速模数采集,采样速度30MHz,并且进行了算法优化,以保证数据处理的实时性。
俄罗斯激光系统公司2000年左右研制出MLC多功能激光雷达系统。该系统为大型车载式结构,能实现全方位空域的扫描(见图 6[16])。系统采用外差探测方式,能实现远程距离分辨,其最大作用距离达到15km,距离分辨时能达到5km。系统还采用了3个波长测量通道(0.53μm, 1.06μm, 10.6μm),能实现多种化学物质及生物物质的侦测,并同时能实现对目标区域风场的远程测量[16]。

图 6 移动式地基激光雷达复合系统
2003年左右,斯洛伐克Wingling公司研制出第1代小型化有毒有害气体遥测激光雷达系统,该系统采用两台可调谐TEA CO2激光器作为光源,总谱线数大于60条,采用长程差分吸收(DIAL)工作方式,探测距离3km,可探测多种有毒有害气体及污染物种类数。该雷达系统外形尺寸为458mm×260mm×395mm,重量为38kg,是当时最小的差分吸收激光雷达系统产品(见图 7[17])。2004年底,系统正式装备斯洛伐克防化部队。2015年左右原公司归入现在的SEC科技公司,系统升级到了第4代(“猎鹰”Falcon系统),具有对30多种战争有毒有害气体及工业污染气体的远程遥测能力。系统核心模块重量仅约28kg,功耗约25W,是目前国际上集成度最高的生化综合遥测系统,技术先进成熟,可以在固定、车载、无人机等平台上得到广泛应用。

图 7 DD-CWA系统
-
OPO固体激光器作为一种宽调谐相干光源,克服了固体和气体激光器输出波长的局限性,能够产生从紫外到远红外波段的激光。其具有结构简单、调谐范围大、工作可靠、转换效率高、重频快、可以实现小型化与全固化光学参量振荡器等特点。2000年后,美国、英国、日本、意大利、印度等国开展了对可调谐OPO激光器的研究并应用于大气有毒有害气体激光遥测。
2011年,印度设计了以OPO可调谐激光器和钕掺杂钇铝石榴石(Nd:YAG)激光器作为复合光源的DIAL雷达系统,其工作原理如图 8所示[18]。该系统采用OPO(3μm~4μm)可调谐激光器与Nd:YAG(1.064μm)激光器作为复合光源,扩展了DIAL激光雷达的工作波长,广泛适用于生物和化学有毒有害气体遥测。
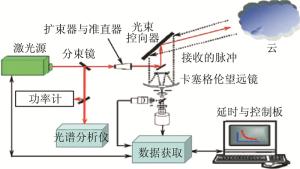
图 8 OPO可调谐激光器和Nd:YAG激光器作为复合光源的差分吸收雷达系统原理图
2019年,印度激光科技中心研制出中波固体DIAL激光雷达(见图 9[19]),该雷达采用3μm~3.4μm的OPO固体可调谐激光器作为光源,200μm的卡式接收天线,利用长程差分吸收原理,在980m的开阔空间中实现了对硫二甘醇蒸汽羽烟的遥测[19]。

图 9 可调红外差分吸收激光雷达
2015年开始,意大利罗马大学等单位开展了一体化激光雷达技术研究,采用双台CO2的长波红外激光器和1.06μm及其倍频0.532μm的固体激光器为光源,实现了对多种有毒有害气体的综合测量。系统工作时,先采用1.06μm及0.532μm的激光对目标区与进行扫描,获得气溶胶云团的信息,当发现有可疑的气溶胶时,在切换到CO2激光通道对化学物质种类、浓度等详细信息进行测量[4]。
QCL是一种能够发射中红外和远红外频段光谱的半导体激光器。它是由贝尔实验室FAIST等人于1994年率先实现[20]。QCL的中长波可调谐波长范围使其非常适合化学和生物传感应用[21]。由于其具有小型化及高可靠性等特点,QCL非常适合用于实现对有毒有害气体的连续测量和监视[22]。图 10为基于开放路径QCL传感器激光遥测工作原理示意图[23]。其中,QCL光束与可见激光共对准,以实现与后向反射器的长光程对准。牛顿望远镜配置将光收集到冷却的碲镉汞探测器上, 通过数据采集卡采集探测器信号,并将其传输到电脑上,完成信号的采集[23]。
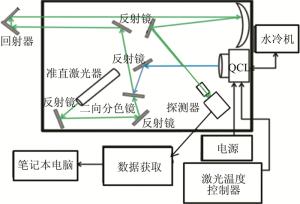
图 10 基于开放路径QCL传感器工作原理示意图
西北太平洋国家实验室(Pacific Northwest National Laboratory,PNNL)在其调频(frequency modulation,FM)DIAL实验中使用量子级联激光器(QCL)[23]。QCL可以通过调整提供给该器件的偏置电流的数量来进行频率调谐[24]。FM DIAL的基本原理为将激光指向散射目标,收集散射的光子,并分析这些数据来估计整个询问路径上的目标分析物浓度。
光纤激光器是最近十几年来研究的热点, 具有紧凑性高、可靠性高、功耗低、寿命长、不需水冷、维护方便、使用灵活等特点,在3维风场测量、目标测速、相干测距上有广泛的应用[25]。近年来,由于全光纤差分吸收激光雷达具有结构简单、系统稳定、探测灵敏度高等优点,适用于大气中CO2, H2O等气体浓度的测量[26-27],已得各国研究机构广泛的应用。
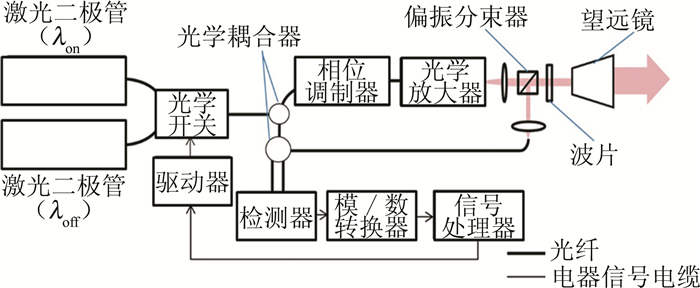
2016年,日本三菱电机公司报道了一款全光纤相干探测体制差分吸收激光雷达,其工作原理图如图 11所示[28]。来自两个激光二极管的波长为1.5μm的连续激光器发射对水蒸气的波峰和波谷波长激光,其波峰或波谷波长由光开关选择。种子光源输出的激光分为两部分:一部分作为本振光;一部分通过脉冲波形调制、放大并传输到大气中。接收到的信号经过模数转换,在信号处理器中进行频谱分析和积累[27]。与非相干激光雷达相比,由于背景光对激光雷达影响很小,它在白天测量方面具有优势。此外,激光雷达还可以同时测量风速和水汽密度。日本三菱电机公司完成了水蒸气密度进行垂直分析试验, 仿真结果表明,从0.1km~4.5km的高度,平均10min的水蒸气密度的精度为10%。该试验的一个重要意义在于采用了全光纤的相干差分探测体制,实现了对大气多要素的遥测,为差分吸收激光雷达系统大气探测的多功能集成提供了一种思路。
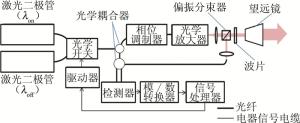
图 11 相干差分吸收激光雷达原理图
-
由于大气中有毒有害等污染气体主要分布于近地面并以多种形态存在,在传统的地面平台测量的基础上,近年来机载及星载平台上的应用也逐步发展,为全球大气污染的全方位一体化遥测提供了技术支撑。机载DIAL系统被认为是开发基于空间的DIAL系统进行全球尺度测量的先驱,为星载DIAL系统提供基础技术积累。
20世纪90年代初,美国空军开始进行机载远距离大气有毒有害气体探测技术研究,研制作用距离50km以上的以CO2激光器为基础的差分吸收激光雷达。其第一阶段采用直接探测方式,发射接收机包括输出能量4J、重频30Hz的波长捷变CO2激光器,直径为35cm孔径望远镜,光学稳定平台以及HgCdTe光伏探测器等。发射接收机安装在具有红外收发窗口的KC-130飞机上,试验作用距离为20km~50km。1997年开始的第二阶段研制,发展采用了相干探测原理,采用同样的发射机,但增添了波长捷变的本振激光器,并用宽带探测器替代HgCdTe光伏探测器。
2015年,德国航空航天中心完成了开发的机载差分吸收激光雷达系统CHARM-F用于探测大气甲烷和二氧化碳的飞行测量,开展全球碳循环及温室气体效应研究。图 12为CHARM-F测量示意图[29]。其测量原理采用直接检测的积分路径激光雷达技术,测量中激光雷达发射激光脉冲,激光脉冲从“硬目标”反向散射,硬目标可以是地面、海面或明确定义的云面。其后,激光雷达的接收器检测返回的激光脉冲能量,并且可以导出相应的吸收气体(CO2, CH4)的积分柱含量[29]。
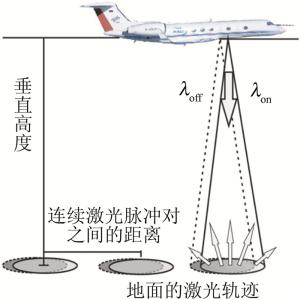
图 12 CHARM-F测量示意图
受限于地面、布站、光照等限制,对大规模有害气体气溶胶云团的运动态势,地基和机载激光雷达不能提供全球连续时空检测信息。星载差分吸收激光雷达不受地理位置的限制, 可获得更大范围内有害气体气溶胶云团运动态势的信息。具有观察整个天体的能力,实现天体测绘、全球信息采集、全球环境监测、大气结构测量。目前,星载差分吸收激光雷达还不能够对污染气体进行探测,只能实现对气溶胶的探测。
-
集成技术的飞速发展,激光雷达技术日趋成熟,已在大气环境监测、气象观测及有毒有害气体侦测等领域得到广泛的应用。目前地球大气环境恶化,各类突发事件增多,全球性高时空分辨率,高精度的大气环境监测,气象灾害的早期预警,有毒有害气体泄露监测等技术的研究已经成为当前热门话题,也为差分吸收激光雷达技术的应用及发展提供了机遇。
大气中有毒有害污染气体的近程检测手段有很多,中远程探测系统为目前及未来发展的重点。中远距离的大气探测技术手段仍主要以差分吸收、喇曼及TDLAS技术为主线,以及以此为技术基础的新复合技术体制。激光谱遥测技术发展多年,近年来新的复合技术层出不穷,并且随着激光器、光谱识别及大气探测等技术领域发展,与大气污染相关的多种大气要素(如气溶胶、大气风场、温度、湿度等)探测技术也得到进一步提升,也进一步推动对大气污染更加精细化遥测。
近年,激光发射技术方面得到了快速发展,伴随着OPO固体、光纤、QCL激光器技术及单光子探测、相干探测、量子探测等新探测体制技术的进一步发展,未来可采用小型化、大能量的激光光源及其复合技术得到更快的发展,为更远、更精确地探测更多有毒有害气体提供了可能。可以预测宽光谱、多波长、新探测体制的激光雷达将成为有毒有害气体激光遥测技术发展的新方向。
多平台应用是未来有毒有害气体激光遥测技术发展的趋势。从穿戴式、便携、地基、车载、机载到星载多平台应用都将得到发展,未来监测体系朝多应用平台及分布式网络化方向发展。
目前,越来越多的激光遥测系统采用复合光源,通过系统集成,具备多波长探测的能力,实现同时探测不同类型的有毒有害气体。同时,可以通过多种遥测技术的融合,完成对不同类型有毒有害气体的同时探测。针对大气有毒有害气体产生及扩散具备一定的气象及地理环境条件的要求,未来大气有毒有害气体监测技术,除对有毒有害等气体监测外,还需一体化集成气象及地理环境测绘等多种技术集成;通过信号处理及现代模式识别算法技术,来实现对大气综合环境的监测;通过有毒有害气体分布信息与其它大气综合信息等的深度融合,从分布各地的多平台传感器收集处理后接入网络,激光雷达遥测技术与微波遥感、红外遥感、北斗遥感相互补充,将构成“无缝隙”环境综合保障体系,对有毒有害气体的远程/近程、地/空/天多层次立体监测,具有重要现实意义。
基于差分吸收激光雷达有毒有害气体遥测进展
Development of toxic and harmful gas remote sense based on differential absorption lidar technology
-
摘要: 差分吸收激光雷达具有探测距离远、灵敏度高、响应时间快等特点,可用于大范围大气有毒有害气体的遥感监测,成为近年来大气有毒有害气体激光遥测技术发展的重点。首先阐述了差分吸收激光雷达大气遥测基本原理,其次从激光器应用和系统平台发展两个方面分析了该技术的技术发展现状,最后提出了宽光谱、多波长、新探测体制的激光雷达、多平台应用、复合系统将成为未来基于差分吸收激光雷达有毒有害气体遥测发展方向。Abstract: Differential absorption lidar has the characteristics of long detection distance, high sensitivity, and fast response. It can be used for remote sensing of large-scale atmospheric toxic and harmful gases, and has become the focus of the development of atmospheric toxic and harmful gas laser telemetry technology in recent years. Firstly, the basic principle of differential absorption lidar atmospheric telemetry is described. Secondly, the development status of the technology is analyzed from two aspects of laser application and system platform development. Finally, the development direction of wide spectrum, multi-wavelength, new detection system lidar, multi-platform application and composite system will become the future toxic and harmful gas telemetry.
-
Key words:
- laser technique /
- differential absorption /
- lidar /
- toxic and harmful gases remote sense
-
表 1 激光器技术在DIAL应用优缺点比较[13]
优点 缺点 CO2差分吸收激光雷达 技术成熟,多种商业产品 调谐范围窄,体积大 QCL差分吸收激光雷达 窄线宽,高重频,体积小 能量低 OPO差分吸收激光雷达 波长覆盖范围较宽 调谐速度慢  下载: 导出CSV
下载: 导出CSV
表 2 国外典型CO2 DIAL产品
年份 名称 主要技术参量 附加说明 1997年 美国的野猫化学侦察车 有效探测距离:20km~40km 可调谐TEA CO2激光器直接探测 1999年 美国CP LA-BSDS 有效探测距离:3km~50km多种生化物质检测 直接探测/外差探测 2000年 俄罗斯MLC 有效探测最大距离:15km多种生化物质检测 可调谐激光器外差探测 2015年 斯洛伐克Falcon 4GS 有效探测最大距离:5km超过30种生化物质及污染物的遥测识别 两个可调谐TEA CO2激光器直接探测
下载: 导出CSV
-
[1] ORTOLANI C, VITALE M. The importance of local scale for assessing, monitoring and predicting of air quality in urban areas[J]. Sustainable Cities and Society, 2016, 26(1): 150-160. [2] OTTINGER G, SARANTSCHIN E. Exposing infrastructure: How activists and experts connect ambient air monitoring and environmental health[J]. Environmental Sociology, 2017, 3(2): 155-165. doi: 10.1080/23251042.2016.1226690 [3] TRTICA M S, RADAK B, MILOVANOVIC D, et al. Laser-based optical techniques for the detection of chemical agents*[J]. The European Physical Journal Plus, 2018, 133(7): 268. doi: 10.1140/epjp/i2018-12145-4 [4] GAUDIO P. Cyber and chemical, biological, radiological, nuclear, explosives challenges[M]. Heidelberg, Germany: Springer, 2017: 155-177. [5] LIU Q W, CHEN Y F, WANG J, et al. Design and implementation of NO2 differential absorption lidar sources[J]. Laser Technology, 2018, 42(4): 433-439 (in Chinese). [6] ZHANG Y, YANG Z H, LI X F, et al. Development of lidar detection technology for chemical/biological agents[J]. Laser & Optoelectronics Progress, 2014, 51(3): 030002 (in Chinese). [7] PUSHKARSKY M, WEBBER M, PATEL C K N. High-sensitivity high-selectivity detection of CWAs and TICs using tunable laser photoacoustic spectroscopy[J]. Proceedings of the SPIE, 2005, 5732: 93-107. doi: 10.1117/12.582680 [8] TONG W H, JIANG D, ZHOU D F, et al. Study on the chemical gas detecting system by CO2 DIAL[J]. Laser Technology, 2007, 31(5): 479-482 (in Chinese). [9] FUJⅡ T, FUKUCHI T. Laser remote sensing[M]. Boca Raton, USA: CRC Press, 2005: 141-196. [10] LIU L L, YANG J, HUANG J, et al. Analysis of SO2 and NO2 concentration profiles in Huainan detected by a lidar[J]. Laser Technology, 2019, 43(3): 353-358 (in Chinese). [11] VASIL'EV B I, MANNOUN O. IR differential-absorption lidars for ecological monitoring of the environment[J]. Quantum Electronics, 2006, 36(9): 801-820. doi: 10.1070/QE2006v036n09ABEH006577 [12] HUANG B K.Research progress of laser detecting typical gases in atmosphere[J].Laser and Infrared, 2012, 42(11):1222-1225 (in Chinese). [13] WOJTANOWSKI J, ZYGMUNT M, KOPCZYN'SKI K, et al. Optical stand-off detection of biological and chemical hazards—Prospects and concerns[C]//2018 Baltic URSI Symposium (URSI). New York, USA: IEEE, 2018: 100-105. [14] FAIST J. Quantum cascade lasers[M]. Oxford, UK: Oxford University Press, 2013:9-10. [15] PARRACINO S, GELFUSA M, LUNGARONI M, et al. First tests of a multi-wavelength mini-DIAL system for the automatic detection of greenhouse gases[J]. Proceedings of the SPIE, 2017, 10424: 1042406. [16] BOREYSHO A S, CHAKCHIR S Y, KONYAEV M A, et al. Optical heterodyning in differential tunable CO2 laser systems[J]. Proceedings of the SPIE, 2006, 6160: 61602R. [17] BERNASCOLLE P F. CWA stand-off detection, a new figure-of-merit: the field surface scanning rate[J]. Proceedings of the SPIE, 2013, 8710: 871008. doi: 10.1117/12.2018305 [18] VEERABUTHIRAN S, RAZDAN A K. LIDAR for detection of chemical and biological warfare agents[J]. Defence Science Journal, 2011, 61(3): 241-250. doi: 10.14429/dsj.61.556 [19] VEERABUTHIRAN S, RAZDAN A K, JINDAL M K, et al. Open field testing of mid IR DIAL for remote detection of thiodiglycol vapor plumes in the topographic target configuration[J]. Sensors and Actuators, 2019, B298(1):126833. [20] FAIST J, CAPASSO F, SIVCO D L, et al. Quantum cascade laser[J]. Science, 1994, 264(5158): 553-556. doi: 10.1126/science.264.5158.553 [21] SUBRAMANIAM T K. Quantum cascade laser in atmospheric trace gas analysis[J]. Journal of Environment, 2015, 1(1): 1-4. [22] GOYAL A K, KOTIDIS P, DEUTSCH E R, et al. Detection of chemical clouds using widely tunable quantum cascade lasers[J]. Proceedings of the SPIE, 2015, 9455: 94550L. [23] MICHEL A P M, MILLER D J, SUN K, et al. Long-path quantum cascade laser-based sensor for methane measurements[J]. Journal of Atmospheric and Oceanic Technology, 2016, 33(11): 2373-2384. doi: 10.1175/JTECH-D-16-0024.1 [24] GRASSO R J. Defence and security applications of quantum cascade lasers detection of chemical clouds using widely tunable quantum cascade lasers[J]. Proceedings of the SPIE, 2016, 9933: 99330F. [25] MA F M, CHEN Y, YANG Z H, et al. Latest development of laser Doppler wind measurement technology[J]. Laser & Optoelectronics Progress, 2019, 56(18): 180003 (in Chinese). [26] GAO P, HU Y H, ZHAO N X, et al. Accuracy analysis of all-fiber differential absorption lidar for atmospheric component[J]. Acta Optica Sinica, 2014, 34(3): 0301003 (in Chinese). [27] HU Y, DONG X, ZHAO N, et al. Fast retrieval of atmospheric CO2 concentration based on a near-infrared all-fiber integrated path coherent differential absorption lidar[J]. Infrared Physics & Technology, 2018, 92(1): 429-435. [28] IMAKI M, KOJIMA R, YANAGISAWA T, et al. Preliminary study on ground based coherent differential absorption LIDAR for vertical profiling of water vapor density using 1.53μm wavelength[C]//18th Coherent Laser Radar Conference. Montgomerie, USA: Lockheed Martin Coherent Technologies, 2016: 1-5. [29] AMEDIEK A, EHRET G, FIX A, et al. CHARM-F—a new airborne integrated-path differential-absorption lidar for carbon dioxide and methane observations: Measurement performance and quantification of strong point source emissions[J]. Applied Optics, 2017, 56(18): 5182-5197. -

 点击查看大图
点击查看大图

图(12) / 表(2)
计量
- 文章访问数: 9741
- HTML全文浏览量: 7335
- PDF下载量: 31
- 被引次数: 0
