 网站地图
网站地图

 下载:
下载:




-
光学3维传感技术[1-2]由于其具有非接触、精度高、测量速度快、自动化程度高等特点,在工业生产及日常生活中有广泛的应用,如产品质量监测、文物保护、牙科整形、人机互动界面等。随着光学3维传感应用的发展,动态场景的3维成像需求日益增长[2-7]。其中基于条纹投影的光学3维面形测量技术[8-9]由于能够获取高密度3维数据,成为常用的技术。该技术可分为基于单幅条纹和基于多幅条纹投影的3维成像方案两大类[10]。基于单幅条纹的方案[11]获取数据速度快,但是其原理限制了测量精度;而基于多幅条纹的方案[12]原理上精度高,但是要实现高精度动态3维测量需要高速硬件、高亮度的光源,限制了其在动态3维成像中的应用。如何在较低的硬件要求下提高多幅条纹投影动态3维成像精度是研究的一个热点,研究者做了诸多努力。一方面从条纹、测量系统设计角度等进行研究。如LI等人[13]提出了π相移傅里叶变换轮廓术,投影两幅具有π相移的正弦条纹消除背景光的影响;LI等人[14]提出了离焦投影两幅具有1/3周期移动的罗奇光栅,消除背景光及三次谐波的影响;TAO等人[15]提出采用复合条纹及多目系统几何约束的方法实现高速3维测量。另一方面,研究如何对拍摄的变形条纹进行处理,获得高精度3维结果。如WEISE等人[16]在运动导致的相移误差较小情况下用泰勒级数展开近似得到实际相位的解析表达式;然后基于局部线性假设,在每个像素周围的小邻域内采用线性拟合得到相移误差从而求解出变形条纹实际相位。该方法减小了运动导致的相位失真,但是它假设运动是单一的,在多数情况下与实际不完全相符。CONG等人[17]提出了傅里叶辅助相移(Fourier assisted phase shift, FAPS)方法,用傅里叶分析法估计出变形条纹间的实际相移量,再用相移法求出条纹相位。与参考文献[16]相比,该方法有效减轻了运动导致的相位失真,并且对实际相移量没有特别限制,适用于多种运动组合的情况。由于傅里叶分析是一种全局的分析法,图像中条纹突变处的误差会扩散到较远的地方,影响了全局的相移量估计精度,从而降低了相位估计精度。而加窗傅里叶分析法[18-19]具有良好的局域频谱分析能力,能够有效提高相移量估计精度。
作者提出了采用加高斯窗傅里叶辅助相移(Gaussian windowed Fourier assisted phase shift, GWFAPS)方法,提高了局部相移量估计精度、减轻了误差扩散,从而降低运动导致的相位失真。本文中给出了理论分析及实验验证结果。
-
条纹投影3维测量系统结构如图 1所示,主要由投影仪和摄像机两部分构成。测量时首先投影仪投射正弦条纹到被测物体上,同时摄像机在另一方位拍摄被物体表面高度调制的变形条纹;然后估计出变形条纹的相位[20],由此得到投影仪与摄像机图像平面间的对应关系;最后由三角测量原理得到物体表面的3维形貌[21]。相位估计精度是获得高精度3维形貌的关键之一。
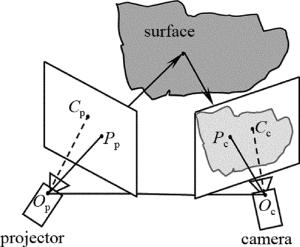
Figure 1. Schematic diagram of 3-D measurement system based on fringe projection
-
通过相移进行变形条纹相位估计可以采用最小二乘法。在理想情况下,拍摄的第i幅变形条纹表示为:
$ {I_i}(u, v) = {I_{\rm{b}}}(u, v) + {I_{\rm{a}}}(u, v)\cos \left[ {\varphi (u, v) + {\delta _i}} \right] $
(1) 式中,Ii(u, v)为图像表达式,Ib(u, v)为背景光强,Ia(u, v)为条纹幅度,ϕ(u, v)为变形条纹相位,δi为条纹相移量,(u, v)为像素坐标。根据三角恒等式,对于每个像素点, (1)式可以写成:
$ \begin{array}{*{20}{c}} {{I_i} = a + {I_{\rm{a}}}\cos \phi \cos {\delta _i} - {I_{\rm{a}}}\sin \phi \sin {\delta _i} = }\\ {a + b\cos {\delta _i} + c\sin {\delta _i}} \end{array} $
(2) 式中a=Ib,b=Iacosϕ,c=Iasinϕ。设实际拍摄的条纹为Ii′,求解参量a,b,c使得S最小:
$ \begin{array}{*{20}{c}} {S = \sum\limits_{i = 0}^{M - 1} {{{\left( {{I_i} - I_i^\prime } \right)}^2}} = }\\ {\sum\limits_{i = 0}^{M - 1} {{{\left( {a + b\cos {\delta _i} + c\sin {\delta _i} - I_i^\prime } \right)}^2}} } \end{array} $
(3) 式中,M为相移条纹幅数。由$\frac{{\partial S}}{{\partial a}} = 0, \frac{{\partial S}}{{\partial b}} = 0, \frac{{\partial S}}{{\partial c}} = 0$可得:
$ \mathit{\boldsymbol{X}} = {\mathit{\boldsymbol{A}}^{ - 1}}\mathit{\boldsymbol{B}} $
(4) 式中,
$ \mathit{\boldsymbol{X}} = {\left[ {\begin{array}{*{20}{l}} a&b&c \end{array}} \right]^{\rm{T}}} $
(5) $ \mathit{\boldsymbol{A}} = \left[ {\begin{array}{*{20}{c}} M&{\sum\limits_{i = 0}^{M - 1} {\cos } {\delta _i}}&{\sum\limits_{i = 0}^{M - 1} {\sin } {\delta _i}}\\ {\sum\limits_{i = 0}^{M - 1} {\cos } {\delta _i}}&{\sum\limits_{i = 0}^{M - 1} {{{\cos }^2}} {\delta _i}}&{\sum\limits_{i = 0}^{M - 1} {\cos } {\delta _i}\sin {\delta _i}}\\ {\sum\limits_{i = 0}^{M - 1} {\sin } {\delta _i}}&{\sum\limits_{i = 0}^{M - 1} {\cos } {\delta _i}\sin {\delta _i}}&{\sum\limits_{i = 0}^{M - 1} {{{\sin }^2}} {\delta _i}} \end{array}} \right] $
(6) $ \mathit{\boldsymbol{B}} = {\left[ {\sum\limits_{i = 0}^{M - 1} {I_i^\prime } \;\;\;\sum\limits_{i = 0}^{M - 1} {I_i^\prime } \cos {\delta _i}\;\;\;\sum\limits_{i = 0}^{M - 1} {I_i^\prime } \sin {\delta _i}} \right]^{\rm{T}}} $
(7) 变形条纹的相位可由下式得到:
$ \phi = - \arctan \left( {\frac{c}{b}} \right) $
(8) 根据最小二乘法原理可知,在理想情况下可以得到准确的条纹相位,而当条纹的背景光强、幅度及相移量δi存在误差时, 将导致相位ϕ估计出现误差。在动态3维测量中,运动导致的附加相移是相位估计误差的主要来源。
-
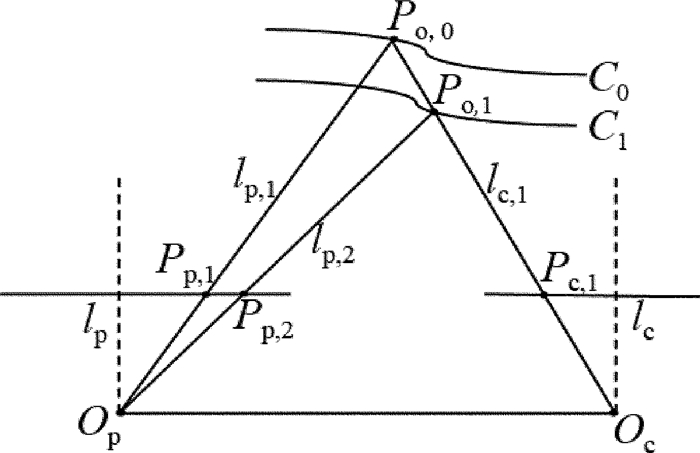
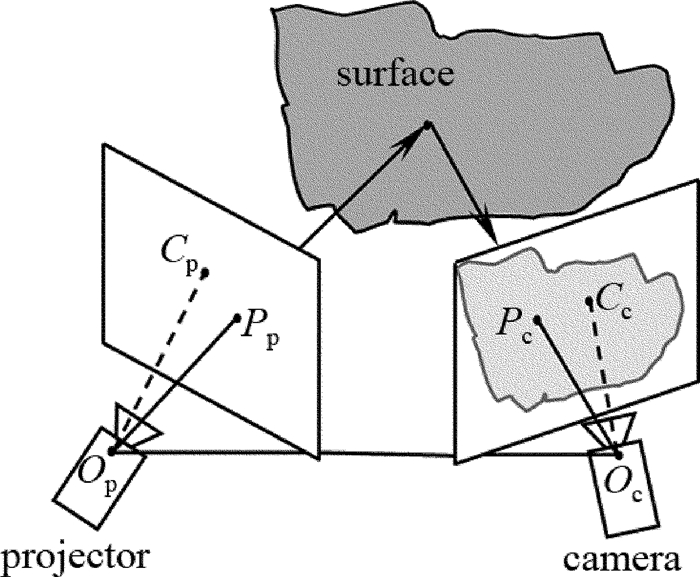
投影仪可以看成是反向工作的摄像机,因此条纹投影3维测量系统等效于一个双目系统。可以在该系统中的一个对极平面(如图 2中射线lp, 1, lp, 2, lc, 1所在的平面)中从摄像机角度来分析运动导致的附加相移。在图 2中,lp和lc分别为投影仪和摄像机的图像平面与对极平面的交线,C0和C1分别为t0和t1时刻被测物体表面与对极平面的交线。假设在t0时刻投影仪图像平面上Pp, 1点对应的条纹相位为ϕ0,Pp, 2点对应的条纹相位为(ϕ0+Δϕ),则摄像机在t0时刻采集的图像平面上Pc, 1点对应的条纹相位为ϕ0。在t1时刻条纹相移了δ1,Pp, 2点对应的条纹相位为(ϕ0+Δϕ+δ1),同时物体表面相对于测量系统也有一定运动量,在图 2中,物体表面与射线lc, 1的交点由Po, 0变为Po, 1,则摄像机在t1时刻采集的图像平面上Pc, 1点对应的条纹相位为(ϕ0+Δϕ+δ1)。由上述分析可知,由于被测物体表面运动,t0, t1时刻摄像机采集到的变形条纹图像相移量由静止时的δ1变为δ1′=Δϕ+δ1。根据相移法原理,为准确估计出t0时刻的变形条纹相位ϕ0,需要获取变形条纹的实际相移量δ1′。

Figure 2. Diagram for phase shift caused by motion
-
当物体表面运动随机时,无法预测附加的相移量,参考文献[14]中提出了傅里叶分析法估计实际相移量。由于傅里叶分析是一种全局分析方法,在条纹无突变情况下该方法获得了良好的效果。然而在条纹存在突变时,突变处的相移量估计存在较大误差,并且误差会以突变处为中心向周围以逐渐衰减的波动形式扩散,形成所谓的“振铃”现象。为减小相移量估计误差,作者采用加窗傅里叶分析方法估计条纹间的相移量。这样条纹相移量估计误差被限制在一定范围内。由于2维加窗傅里叶变换(2-dimensional-windowed Fourier transform,2D-WFT)很容易由1维扩展而来,这里以1维情况来讨论。
1维加窗傅里叶变换(1-dimensional-windowed Fourier transform,1D-WFT)表示如下:
$ {F_{\rm{w}}}\left( {{u_0}, \xi } \right) = \int_{ - \infty }^{ + \infty } g (u)W\left( {u - {u_0}} \right)\exp ( - {\rm{j}}\xi u){\rm{d}}u $
(9) 式中,g(u)为形变条纹的一行数据;W(u)为窗函数,u0为位移量;ξ=2πω, ω为空间频率。
由(9)式可知,加窗傅里叶变换得到的局部频谱受到窗函数的影响。由于高斯窗具有较好的时域和频域性能,这里选用它作为窗函数。引入窗口伸缩因子σ,则窗函数的定义如下:
$ W(u) = \frac{1}{{\sqrt {2{\rm{ \mathsf{ π} }}} \sigma }}\exp \left( { - \frac{{{u^2}}}{{2{\sigma ^2}}}} \right) $
(10) 窗口的大小随着的σ变化而变化,σ增大的同时,窗口也会随着逐渐增大。采用高斯窗的1D-WFT表示如下:
$ \begin{array}{*{20}{l}} {{F_{\rm{w}}}\left( {{u_0}, \xi } \right) = \frac{1}{{\sqrt {2{\rm{ \mathsf{ π} }}} \sigma }}\int_{ - \infty }^{ + \infty } g (u) \times }\\ {\exp \left[ { - \frac{{{{\left( {u - {u_0}} \right)}^2}}}{{2{\sigma ^2}}}} \right]\exp ( - {\rm{j}}\xi u){\rm{d}}u} \end{array} $
(11) 由(11)式得到的是在以u0为中心的邻域内变形条纹频谱。与傅里叶分析相移量估计类似,在频域进行滤波,滤除1级谱外的其它频谱,然后做逆傅里叶变换得到空域信息,其辐角就是变形条纹的相位。这里只求解u0点的相位,通过移动窗口就能得到所有位置的相位。由参考文献[19]可知,这个相位比相移法得到的相位误差大,但是两幅条纹间的相位差即相移量误差较小。为得到变形条纹图间相移量,对每幅图像都采用上述方法求出变形条纹的相位分布再计算相移量。设第i幅图的相位分布为ϕi(u, v),则条纹间实际相移量可表示为:
$ \left\{ {\begin{array}{*{20}{l}} {\delta _0^\prime (u, v) = 0}\\ {\delta _i^\prime (u, v) = {\phi _i}(u, v) - {\phi _{i - 1}}(u, v), (i > 0)} \end{array}} \right. $
(12) -
由于实验中很难得到真实的相移量,为验证提出方法的有效性,首先采用仿真的方法评估其相移量估计精度, 然后搭建测量系统对实际场景进行测量,通过相位分布中由于相移不准导致的条纹状误差大小来评估相位估计精度。
-
条纹突变分为频率突变和对比度突变。采用计算机仿真的方法研究了这两类条纹突变情况下的相移量估计精度,一类是场景表面深度台阶形变化,另一类是场景反射率台阶形变化的情况。所用图像尺寸为600pixel×600pixel,相移量为2π/3。条纹周期为18pixel。首先比较了傅里叶分析法(Fourier analysis, FA)、加高斯窗傅里叶分析法(Gaussian windowed Fourier analysis, GWFA)估计相移量精度,窗口宽度为64pixel×64pixel。图 3a是计算机仿真产生的深度台阶形变化的第1幅变形条纹图,中间部分为从左到右呈4级高度的台阶,周围是平面; 图 3b、图 3c分别为采用FA, GWFA估计的相移量; 图 3d为平面部分一行用FA及GWFA估计的相移量分布曲线; 图 3e为台阶部分一行用上述2种方法估计的相移量分布曲线。很明显,GWFA的结果好于FA的结果。整幅图像的相移量估计标准偏差δ采用FA为0.031rad,采用GWFA为0.0019rad。
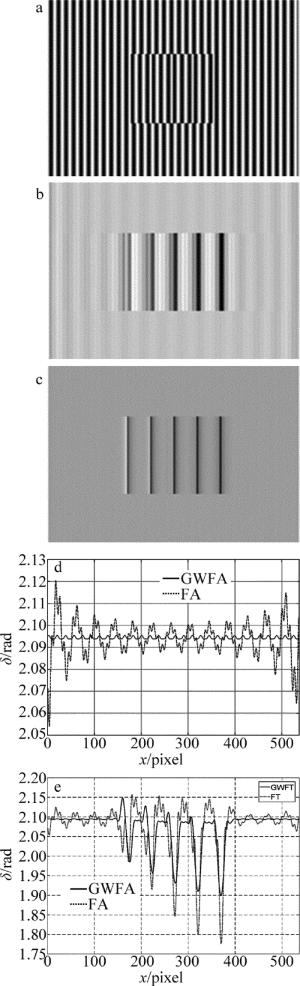
Figure 3. Comparison of phase shift estimation for scene with step depth
图 4a是计算机仿真产生的反射率台阶形变化的第1幅变形条纹图,中间部分反射率变化呈4级台阶形,周围反射率相同。图 4b、图 4c分别为采用FA, GWFA估计的相移量,图 4d为台阶部分一行用上述2种方法估计的相移量。同样可以得到采用GWFA的结果最好。
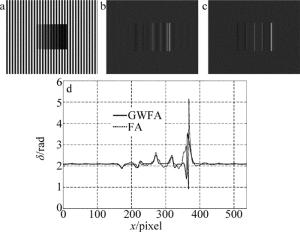
Figure 4. Comparison of phase shift estimation of scene with step reflectance
-
作者搭建了结构如图 1所示的测量系统。参量如下:投影条纹的周期为18pixel,采用整周期等间隔3步相移法,采集的图像为640pixel×480pixel。为了验证真实场景中本文中所提出的方法的有效性,采集了运动的标准平面分别使用GWFAPS,FAPS以及相位测量轮廓术(phase measurement profilometry, PMP) 3种方法处理进行结果对比,3种处理方法的精度分别为0.1673rad,0.2657rad,0.4023rad。实验结果表明,GWFAPS的相位估计恢复精度最高。
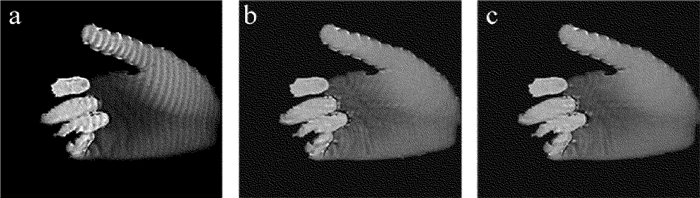
采集了3组不同的运动状态来评估提出方法的相位恢复情况,分别是手掌的前后移动,旋转以及握拳(非刚体运动)。实验中比较了PMP, FAPS及GWFAPS 3种方法的相位恢复情况。图 5、图 6和图 7是这3类运动情况下不同方法的数据处理结果对比。从图中可以看出,采用FAPS恢复的相位,虽然还有条纹状误差,但是比PMP的误差明显减小,采用GW-FAPS恢复的相位,其误差进一步减小。由此可以得出:与PMP和FAPS相比,采用GWFAPS的相位估计恢复精度最高,明显降低运动导致的相位失真。

Figure 5. Comparison of recovered phase of forward and backward movement

Figure 6. Comparison of recovered phase of rotation

Figure 7. Comparison of recovered phase of action of making a fist
-
相移条纹投影法能够获取高密度的3维数据,同时精度较高。但是在动态场景3维测量中,如果场景与测量系统采集速度相比变化较快,由运动导致的相移误差较大,相移法的测量精度明显下降。作者提出了采用加高斯窗傅里叶分析法改善相移法在动态测量中的精度。计算机仿真对比实验表明了提出的方法在减少相移量估计误差方面的优势。真实场景对比实验证明所提方法能明显提高动态场景相位测量精度。另一方面,采用加高斯窗傅里叶分析法后相位恢复的时间明显增加。同时不同位置的滤波窗口自动选择比较困难。提高相移量估计速度及频域滤波窗口的自动选择是下一步的研究工作。
条纹投影动态3维测量中相位高精度估计
High precision phase estimation of projected fringes in dynamic 3-D measurement
-
摘要: 为了提高条纹投影动态3-D形貌测量精度, 采用加窗傅里叶分析辅助相移的方法来减小运动导致的相移误差。首先采用加窗傅里叶分析法估计变形条纹间的实际相移量, 然后采用最小二乘法估计出变形条纹的高精度相位分布, 最后由估计的相位计算得到场景3维形貌。理论分析了物体运动对相移量的影响, 通过仿真研究了所提方法的相移量估计精度, 并搭建了实验系统进行验证。结果表明, 实验中采用所提方法的相位恢复精度达到0.1673rad, 比现有方法有明显提高。该方法用来提高条纹投影动态3-D形貌测量中相位精度是有效的。Abstract: In order to improve the accuracy of dynamic 3-D shape measurement by fringe projection, the windowed Fourier analysis was used to reduce the phase shift error caused by motion. Firstly, the actual phase shift between deformed fringes was estimated by windowed Fourier analysis. Then, the phase distribution of the deformed fringes was estimated with high precision by the least square method. Finally, 3-D shape of the scene was obtained from the estimated phase calculation. The influence of object motion on phase shift was analyzed theoretically. The phase shift estimation accuracy of the proposed method was studied by simulation. An experimental system was built to verify the results. The phase recovery accuracy of the proposed method is 0.1673rad. Compared with the existing methods, this method is obviously improved. The results show that the method is effective.
-
Figure 3. Comparison of phase shift estimation for scene with step depth
a—deformed fringe b—estimated phase shift by FA c—estimated phase shift by GWFA d—phase shift curve of plane e—phase shift curve of step depth
Figure 4. Comparison of phase shift estimation of scene with step reflectance
a—deformed fringe b—estimated phase shift by FA c—estimated phase shift by GWFA d—phase shift curve of step reflectance
Figure 5. Comparison of recovered phase of forward and backward movement
a—by PMP b—by FAPS c—by GWFAPS
-
[1] CHEN F, BROWN G M, SONG M. Overview of three-dimensional ahape measurement using optical methods[J]. Optical Engineering, 2000, 39(1):10-22. doi: 10.1117/1.602438 [2] SU X Y, ZHANG Q C. Dynamic 3-D shape measurement method: A review[J]. Optics & Lasers in Engineering, 2010, 48(2):191-204. [3] ZHANG S. Recent progresses on real-time 3-D shape measurement using digital fringe projection techniques[J]. Optics & Lasers in Engi- neering, 2010, 48(2): 149-158. [4] LI H Y, LI Y, WANG H. A method for fast acquiring three-dimensional shape and color texture, acta photonica sinica[J]. Acta Photonica Sinica, 2016, 45(1): 0112003 (in Chinese). doi: 10.3788/gzxb20164501.0112003 [5] JEUGHT S V D, DIRCKX J J J. Real-time structured light profilo-metry: A review[J]. Optics & Lasers in Engineering, 2016, 87:18-31. [6] FENG W, ZHANG Q C. Analysis of membrane vibration modes based on structured light projection[J]. Laser Technology, 2015, 39(4):446-449(in Chinese). [7] XU R Ch, ZHOU Y F, ZHANG Q C, et al. 3-D shape measurement based on binocular vision and digital speckle spatio-temporal correlation[J]. Laser Journal, 2018, 39(3): 32-36(in Chinese). [8] SU X Y, ZHANG Q C, CHEN W J. Three-dimensional imaging based on structured illumination [J]. Chinese Journal of Lasers, 2014, 41(2):0209001(in Chinese). doi: 10.3788/CJL201441.0209001 [9] WU Y Sh, ZHANG Q C. Fourier transform profilometry simulation in Matlab[J]. Electronic Science and Technology, 2017, 30(6): 9-12(in Chinese). [10] GENG J. Structured-light 3-D surface imaging: A tutorial [J]. Advances in Optics and Photonics, 2011, 3(2): 128-160. doi: 10.1364/AOP.3.000128 [11] TAKEDA M, MUTOH K. Fourier transform profilometry for the automatic measurement of 3-D object shapes[J]. Applied Optics, 1983, 22(24): 3977-3982. doi: 10.1364/AO.22.003977 [12] ZHANG S, YAN S T. High-resolution, real-time 3-D absolute coordinate measurement based on a phase-shifting method[J]. Optics Express, 2006, 14(7): 2644-2649. doi: 10.1364/OE.14.002644 [13] LI J, SU X Y, GUO L R. Improved fourier-transform profil moetry for the automatic-measurement of 3-dimensional object shapes [J]. Optical Engineering, 1990, 29(12): 1439-1444. doi: 10.1117/12.55746 [14] LI Y, ZHAO C F, QIAN Y X, et al. High-speed and dense three-dimensional surface acquisition using defocused binary patterns for spatially isolated objects[J]. Optics Express, 2010, 18(21): 21628-21635. doi: 10.1364/OE.18.021628 [15] TAO T Y, CHEN Q, DA J, et al. Real-time 3-D shape measurement with composite phase-shifting fringes and multi-view system[J]. Optics Express, 2016, 24(18): 20253. doi: 10.1364/OE.24.020253 [16] WEISE T, LEIBE B, VAN G L. Fast 3-D scanning with automatic motion compensation[C]// IEEE Conference on Computer Vision & Pattern Recognition. New York, USA. IEEE, 2007: 383291. [17] CONG P Y, XIONG Z W, ZHANG Y Y. Accurate dynamic 3-D sensing with Fourier-assisted phase shifting[J]. IEEE Journal of Selected Topics in Signal Processing, 2015, 9(3): 396-399. doi: 10.1109/JSTSP.2014.2378217 [18] DONG F Q, DA F P, HUANG H. Windowed Fourier transform profilometry based on advanced S-transform[J]. Acta Optica Sinica, 2012, 32(5):0512008(in Chinese). doi: 10.3788/AOS201232.0512008 [19] QIAN K M. Two-dimensional windowed Fourier transform for fringe pattern analysis: Principles, applications and implementations[J]. Optics & Lasers in Engineering, 2007, 45(2): 304-317. [20] HAN Y, ZHANG Q C, WU Y Sh. Performance comparison of three basic phase unwrapping algorithms and their hybrids[J]. Acta Optica Sinica, 2018, 38(8): 0815006(in Chinese). doi: 10.3788/AOS201838.0815006 [21] ZHANG H H, LI Y, ZHANG H Y, et al. Calibration of PMP system using virtual planes[J]. Laser Technology, 2010, 34(5): 600-602(in Chinese). -

 点击查看大图
点击查看大图
图(7)
计量
- 文章访问数: 5980
- HTML全文浏览量: 4465
- PDF下载量: 17
- 被引次数: 0
