 Map
Map




HTML
-
低空风切变是指离地600 m以下风速或风向在空间上快速变化的现象。低空风切变具有生命史短、尺度小和突发性强等特点,是目前威胁航空飞行安全的隐形杀手[1]。对处于起飞和降落阶段的飞机,低空风切变会使其偏离预定航道或产生严重颠簸,甚至造成严重的飞行事故[2-3]。因此,低空风切变一直以来都是民航领域关注的重点。
近年来,随着光电器件的发展,全光纤相干体制的测风激光雷达(light detection and ranging, LiDAR)逐渐成熟并成为风场探测的重要设备。相比传统的测风设备(如测风仪、多普勒天气雷达和风廓线雷达等),测风激光雷达具有灵敏度高、时空分辨率高、测速精准、硬件体积小、探测模式灵活和抗干扰性强等优点[4-5],被广泛用于风电、气象和民航等领域[6]。如法国LEOSPHERE公司相继研发出WINDCUBE系列、WIND IRIS等民用激光测风雷达,被综合应用于风力发电和航空危险天气预警领域。Lockheed Martin公司在2002年开发的激光雷达WindTracer,则主要应用在东京、曼谷和圣路易斯等众多大型国际机场,进行风切变危险天气监测以保障飞行安全。在国内,2010年, 中国电子科技集团公司第二十七研究所对一台1.5 μm的相干测风激光雷达进行场外测风试验,研究了雷达的测速精度,为雷达技术方案的确定积累了宝贵经验[7]。中国海洋大学研制了一台1.55 μm的相干测风激光雷达,主要应用于风能开发领域[8]。西南技术物理研究所也于2011年研制出一台同波长的全光纤相干测风激光雷达,FAN等人[9]将该雷达的测风数据与运行中的风廓线雷达数据和气球测风数据进行对比,验证了雷达的风场探测性能。西宁机场使用该雷达资料进行了高原机场低空风切变的演变规律和结构特征研究[10]。兰州中川机场则基于该雷达观测的下滑道逆风廓线资料,设计了适用于本地风场特征的区域散度法,提升了本地低空风切变的监测和识别能力[11]。
我国地域广袤, 民用机场众多,因地形和气候等的差异,对空间尺度相对较小的民用机场而言,低空风切变的具体影响和预警预报方法,需要具体问题具体分析。此外,即使同类探测设备,它们在不同机场的探测效能也有显著区别。新疆乌鲁木齐地窝堡机场是国家民用一级机场和国家门户机场,受高纬度天气和局地热力性天气的影响,该机场经常发生低空风切变,对飞机的安全运行造成了重大威胁。2021年,该机场引入一部3维测风激光雷达,本文中利用该雷达的探测资料,系统评估了目前3种主流低空风切变算法在该机场的适用性,并统计了该机场低空风切变在冬季和春季的时空分布特征。旨在为测风激光雷达在民航领域的应用提供参考,也为该机场低空风切变的预警预报提供一定基础。
-
图 1a为新疆乌鲁木齐地窝堡国际机场(下面简称乌鲁木齐机场)及周边区域的地形; 图 1b为机场跑道; 图 1c为测风激光雷达外景图。乌鲁木齐机场地处天山山脉以北、准噶尔盆地以南,地势由西南向东北降低,背靠博罗科努山和博格达山,是典型的“呐叭口地形”。在风速较大的情况下,该特殊地形极易产生低空风切变。该机场海拔为648 m,跑道为25#和07#跑道,呈70°~250°走向,全长3600 m。雷达安装于25#跑道入口端。
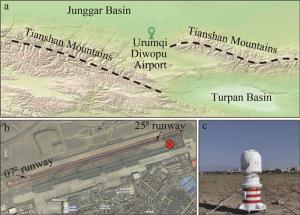
Figure 1. a—surrounding terrains of Urumqi Airport b—the runway c—the appearance of FC-Ⅲ wind LiDAR
本文中使用的是一部由西南技术物理研究所研制的FC-Ⅲ型3-D测风激光雷达。该雷达采用相干、全光纤和多普勒脉冲体制,平均功率低于200 W,发射波长为1.55 μm,空间分辨率为100 m,最大探测距离约为10 km。雷达主要性能参数如表 1所示。
parameters value average power ≤200 W wavelength 1.55 μm scanning mode PPI/RHI/DBS/GP scan range(pitch/azimuth) 0°~180°/0°~360° time resolution ≤2 s range resolution 100 m elevation resolution ≤0.1° wind speed range -60 m/s~60 m/s wind velocity accuracy ≤0.5 m/s detection range 0.02 km~10 km Table 1. Main technical parameters of the FC-Ⅲ wind LiDAR
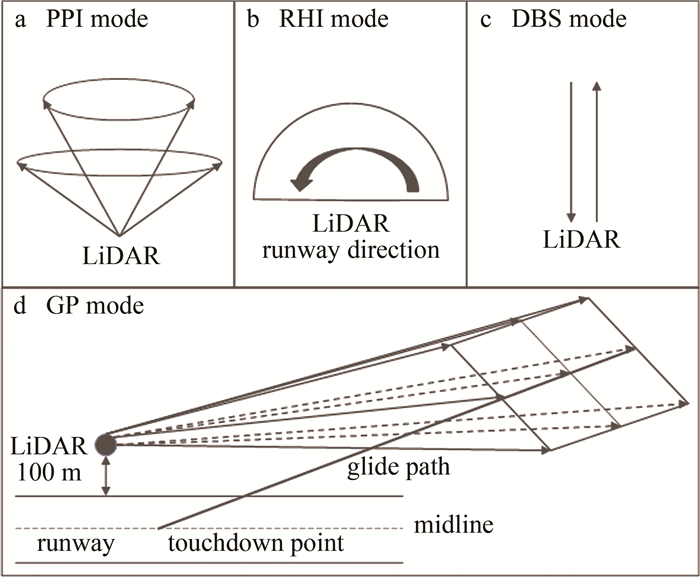
FC-Ⅲ型测风激光雷达工作时,采用4种扫描模式相互协作,按扫描顺序的模式名称分别为:多普勒光速摆动(Doppler beam swinging,DBS)模式、平面位置显示(plan position indicator,PPI)模式、下滑道(glide path,GP)模式和距离高度显示(range height indicator,RHI)模式。4个模式的耗时分别为18 s、180 s、22 s和88 s。图 2为雷达4种扫描模式的示意图。其中PPI模式在水平方向上进行圆周扫描,能有效检测雷达周边10 km范围内大风、地形和强天气系统诱发的低空风切变;RHI模式针对跑道方向进行剖面扫描,主要用以跑道剖面上空的气流结构;DBS模式对顶空进行扫描,能够探测包括锋面和急流等重要天气的时间演变特征; GP模式则是为满足机场实际业务中对低空风切变的监测需求而设计的特殊模式,针对下滑道关键区域进行管道式扫描,用以探测航空领域最为关注的顺风切变、逆风切变和侧风切变,对保障飞行安全具有重要意义。本文中对该雷达2021-10—2022-06 GP模式的径向速度数据展开了研究。
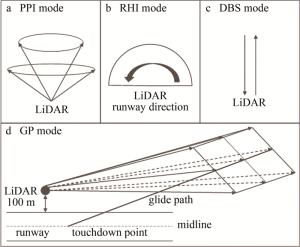
Figure 2. Diagrams of wind LiDAR scanning modes
本文中还使用2022-01—06该机场的航空器报告资料。该资料记录了飞机在飞行过程中遭遇风切变的时间、位置和强度等信息,可作为验证雷达遥测低空风切变的有效性参考[12-13]。
-
飞机起降均沿着下滑道这一特定区域进行,此外,航空器报告描述的风切变事件也主要集中在该区域, 因此该区域的低空风切变对航空飞行安全影响尤为关键[2, 14-15]。本文中对该区域低空风切变的雷达识别进行了效果评估和特征研究。
从国内外研究现状和应用效果来看,目前有3种较主流、可行的下滑道区域低空风切变识别方法,即:单斜坡法、双斜坡法和区域散度法。然而,这3种方法在不同机场的适用性和应用效果与机场风场特征和雷达安装位置及具体雷达性能密切联系[13, 16]。为排除雷达探测误差对低空风切变识别的影响,本文中参考CHAN等人[17]的方法对探测数据资料进行质量控制,具体方法如下:对每个距离库的径向风速与相邻空间的平均风速差值进行判断,若差值超过3 m/s,则认为当前距离库的径向速度可靠性较低,视为奇异值,并以相邻距离库的平均值代替; 随后根据雷达安装位置与机场下滑道的位置关系进行逆风廓线提取, 逆风廓线是指跑道及下滑道路径上的径向风速组合而成的数据序列[18], 在乌鲁木齐机场,激光雷达安装于25#跑道入口,该位置与下滑道接地点位置基本一致,因此逆风廓线近似为雷达GP扫描时在25#跑道方向和07#跑道方向的径向速度数据序列; 提取出逆风廓线后,即可采用识别方法对下滑道区域的低空风切变进行识别。3种方法简要介绍如下。
(a) 单斜坡法。单斜坡法将逆风持续增大或减小的一段空间距离视为一个斜坡,若增大或减小的风速超过某一阈值,即判定为风切变。国际民航组织规定该阈值为7.7 m/s[3]。单斜坡法如下式所示:
式中: Δx为斜坡长度; vp和vp, 1为斜坡两侧端点的径向风速。
(b) 双斜坡法。该方法类似于单斜坡法,但是基于两个相邻斜坡风速增大或减小的风速差平均值来判断低空风切变,其告警阈值与单斜坡法相同,如下式所示:
式中: Δx1和Δx2分别为两个相邻斜坡的长度; vPI, 1为第1个斜坡起始点的风速; vPI, 2为第2个斜坡终点的风速; vPI则为两个斜坡交点的风速。
(c) 区域散度法。该方法以逆风廓线上的每一数据点为中心,将其序号记为i;随后设置3个窗区,依次为窗区1、2和3;最终计算出每一数据点的区域散度值Ii,实现对风切变的检测。具体如下式所示:
式中: vi+D/2+R和vi-D/2-R为窗区1和窗区3的平均风速; ΔL为激光雷达距离库库长; k为窗区内数据点的序号; D为窗区2的宽度; R为窗区1和窗区3的半宽,均以雷达距离库库长的倍数来表示。结合LI等人[11]的研究结果,将D和R分别取为2和1,且当连续3个数据点的Ii绝对值超过0.0025/s,认为该位置存在风切变。若Ii为正值,表明该位置存在逆风切变;反之,则为顺风切变。
本文中以飞机航空器报告作为“真值”评估激光雷达识别低空风切变的效果。考虑到乌鲁木齐机场激光雷达完成一轮完整扫描的周期约为8 min,且水平和垂直低空风切变判别方式的不同会导致空间定位上的差异,故认为当雷达识别结果与航空器报告满足“时间间隔小于8 min、空间间隔小于500 m”时,雷达为成功识别;否则,雷达为漏识别。采用成功率H和漏报率M作为衡量雷达识别效果的两个指标,计算方法如下所示:
式中: Nt为航空器报告的风切变事件总个数; Nl为雷达成功识别的个数。由于激光雷达是连续观测,而航空器报告仅能在有航班的时候且遭遇风切变才有相应记录,因此无法判断雷达判别的风切变是否为误报,故本文中不考虑误报率。
-
2022-01—06期间,乌鲁木齐机场附近共收到31份关于风切变的航空器报告,其中有15次发生在下滑道或跑道等雷达探测区域内。这15次低空风切变的航空器报告信息和雷达3种方法的识别结果如表 2所示。图 3中给出了对应每个风切变事件的逆风廓线(正负速度分别为逆风和顺风)和3种方法识别的结果。图中蓝色、黄色和红色方块分别代表单斜坡法、双斜坡法和区域散度法的风切变识别位置,蓝色圆点代表单斜坡法和区域散度法都识别到的位置,黄色圆点代表双斜坡法和区域散度法都识别到的位置,黄色星号代表 3种方法都识别到的位置,黑色代表没有风切变。需要注意的是,航空器报告提示的风切变信息为定性结果,而激光测风雷达识别结果为定量结果,因此, 一个风切变个例的逆风廓线中会识别出多个风切变位置的情况。
low-level wind shears recorded by pilot reports identification results of different methods pilot report time runway distance to the touch-down point time/km identification time the single-slope method the double-slope method the regional divergence method 2022-01-14T18:41 25# 1.8~2.3 2022-01-14T18:41 failure failure success 2022-01-15T09:44 25# 1.0~2.0 2022-01-15T09:43 failure failure failure 2022-02-06T20:17 25# 0.9~1.0 2022-02-06T20:21 failure failure success 2022-03-08T11:34 25# 0.1 2022-03-08T11:37 failure failure success 2022-03-30T16:08 25# 1.2 2022-03-30T16:06 failure failure success 2022-05-01T11:10 07# 1.0~2.0 2022-05-01T11:11 failure failure success 2022-05-01T12:17 07# 4.8 2022-05-01T12:19 success success success 2022-05-11T18:43 25# 2.0 2022-05-11T18:46 success failure success 2022-05-13T16:29 07# 4.0 2022-05-13T16:29 failure failure success 2022-05-29T17:51 25# 1.0~2.0 2022-05-29T17:55 failure failure success 2022-05-29T22:03 25# 0.3~0.6 2022-05-29T22:03 failure failure success 2022-05-29T22:13 25# 0.3~0.6 2022-05-29T22:12 failure failure failure 2022-05-29T23:27 25# 0.2 2022-05-29T23:29 failure failure success 2022-05-30T13:15 07# 0.0~2.9 2022-05-30T13:12 failure failure success 2022-06-11T16:11 07# 0.6~2.4 2022-06-11T16:16 failure failure success success rate H/% 13.3 6.7 86.7 failure rate M/% 86.7 93.3 13.3 Table 2. Low-level wind shear events reported by pilot and the LiDAR identification results
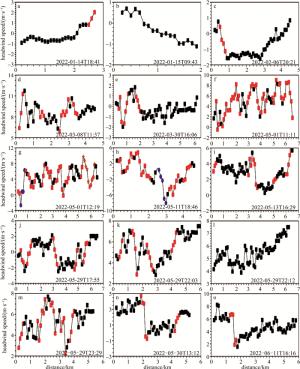
Figure 3. Headwind profiles of 15 wind shear cases and the identification results of LiDAR by three algorithms
结合表 2和图 3来看,15次低空风切变中,区域散度法共识别出13次,H=86.7%,M=13.3%;单斜坡法共识别出2次,H=13.3%,M=86.7%;双斜坡法共识别出1次,H=6.7%,M=93.3%。结果表明,区域散度法显然具有更高的H和更低的M。进一步对区域散度法两个识别失败个例进行分析。如图 3b所示,对个例(2022-01-15T09:44)的风切变,风向存在由逆风转为顺风的切变,但风速整体较小,Ii低于算法的识别阈值,因此未能成功识别。航空器报告是根据机组人员直接感受结合机载设备的告警值给出的定性结果,与雷达的定量观测结果无法进行完全准确的对比,导致了此次漏识别。如图 3l所示,对于个例(2022-05-29T22:13)的风切变,尽管逆风风速较大,但廓线的波动较小,因此Ii也未能达到算法的识别阈值。此外,调查前一时刻的航空器报告(2022-05-29T22:03)发现,该位置存在垂直风切变, 如图 3所示;但由于区域散度法以及上述单斜坡法和双斜坡法都只能用于识别水平风切变,因此未能识别出航空器报告的垂直风切变。若将个例(2022-05-29T22:13)排除不计,则区域散度法的H和M则分别为92.86%和7.14%。
综上所述,目前3种主流的下滑道风切变识别方法中,区域散度法在乌鲁木齐机场具有较好的效果,对该机场下滑道和跑道的低空风切变识别结果是较为可信的。

-
以上述评估为基础,将较为适用且可信的区域散度法作为激光测风雷达识别乌鲁木齐机场下滑道低空风切变的最终方法。利用该方法对2021-10—2022-04整个观测期间的雷达下滑道模式数据全部进行识别,并统计冬春两季低空风切变的时空分布特征。在统计过程中,将整个下滑道作如下划分:跑道划分为单独的一个区域;每向两侧下滑道延伸1 nm距离,划分为一个区域,向两侧各延伸3 nm距离,因此共计7个区域。下滑道模式每间隔8.5 min获取一个时次的数据,利用算法进行识别。若以上某个区域内存在风切变,则将其视为一次风切变事件,并计算其平均风速和平均区域散度值,分别记为vav和Iav,后者能够基本反映风切变强度的大小。
-
为了提高飞行气象服务效率,需要研究不同跑道方向上的风切变发生时间分布规律,下面对不同时段的风切变发生频次进行分析。图 4显示了机场冬、春两季风切变发生频次的日变化。每隔2 h进行统计,红线和蓝线分别代表在25#跑道方向和07#跑道方向(含跑道)下滑道区域的统计结果。总体而言,春季风切变的发生频次远高于冬季,每个时段均高于后者。在机场两个方向的下滑区域内,25#跑道方向的发生频次略高于07#跑道。从日变化角度来看,冬季00:00—14:00时,风切变的发生频次缓慢增长;在14:00—16:00时发生频次达到最高的652次;18:00时后降至全天最低。春季的演变趋势与冬季十分相似,风切变发生频次同样在14:00—16:00时达到最高,为1722次。但发生频次的跃增始于12:00时,且在20:00时后方才降至全天的最低水平。因此,机场在冬季的风切变高发时段为14:00—18:00时,春季则延长为12:00—20:00时。这是由于乌鲁木齐机场三面环山的地形阻挡作用和冬春季节稳定逆温层的存在,导致夜晚和上午时风速较低。而随着午后太阳辐射的增强,低空对流加强,风速大且变化大,风切变的发生频次因此增高。此外,相较于冬季,春季盛行风风向较为复杂,故风切变的发生频次更高,高发时段也更长。
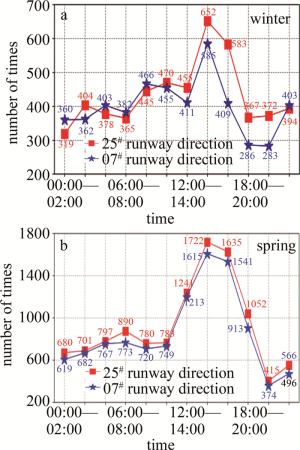
Figure 4. Diurnal variations of the frequency of wind shears
冬、春两季风切变平均风速vav的日变化如图 5a和图 5b所示。红色和蓝色盒须图也分别代表在25#跑道和07#跑道两个方向的统计结果。盒须图中横线为中位数,上下横线分别为75分位和25分位,虚线延伸至最大、最小值,圆圈为平均值。由图可见,春季风切变的风速明显高于冬季。在春季,20:00—22:00时07#跑道方向风切变的vav最大,其平均值和中位数分别为2.6 m/s和2.4 m/s;而冬季则分别为1.8 m/s和1.5 m/s,出现在22:00—24:00时和10:00—12:00时07#跑道方向的下滑道区域。可以看出,07#跑道方向风切变的风速普遍高于25#跑道方向。风速的日变化趋势在冬春两季差别较大,但均在12:00—16:00时为最低值。从样本75分位和25分位的间隔来看,风切变之间的风速差异在春季大于冬季,在07#跑道方向略大于25#跑道方向。值得注意的是,在所有时段的vav平均值均大于中位数,这表明机场平均风速较小的风切变占多数,而平均风速较大的强烈风切变占少数。
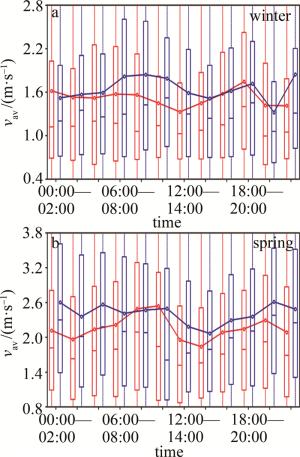
Figure 5. Diurnal variations of the wind speed of wind shears
风切变平均区域散度值Iav反映了切变强度,其统计结果如图 6所示,标记和子图含义同图 5。整体来看,春季风切变强度的日变化趋势为先增大后减小,在14:00—18:00时达到最大;冬季风切变强度的日变化趋势相对混乱。对于不同跑道方向的Iav,07#跑道方向的平均值略大于25#跑道方向,中位数差距不大。春季Iav的平均值和冬季相差较小,但中位数明显高于冬季。冬季Iav的平均值远高于中位数,在00:00—02:00、16:00—20:00和22:00—24:00时段甚至高于75分位数。上述统计结果表明,冬季的风切变强度普遍偏低,且发生频次相对较少,而部分强烈风切变的切变强度远大于普通风切变,故其平均值受到很大的影响,普遍大于中位数。这提醒气象保障人员,在冬季尤其需要注意存在强烈风切变的特殊天气过程。
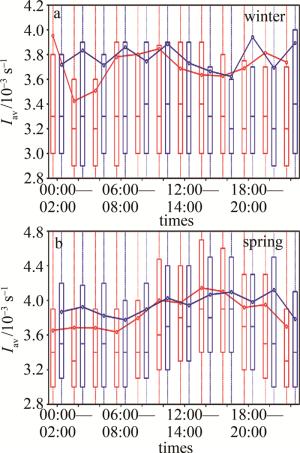
Figure 6. Diurnal variations of average reginal divergence value Iav
-
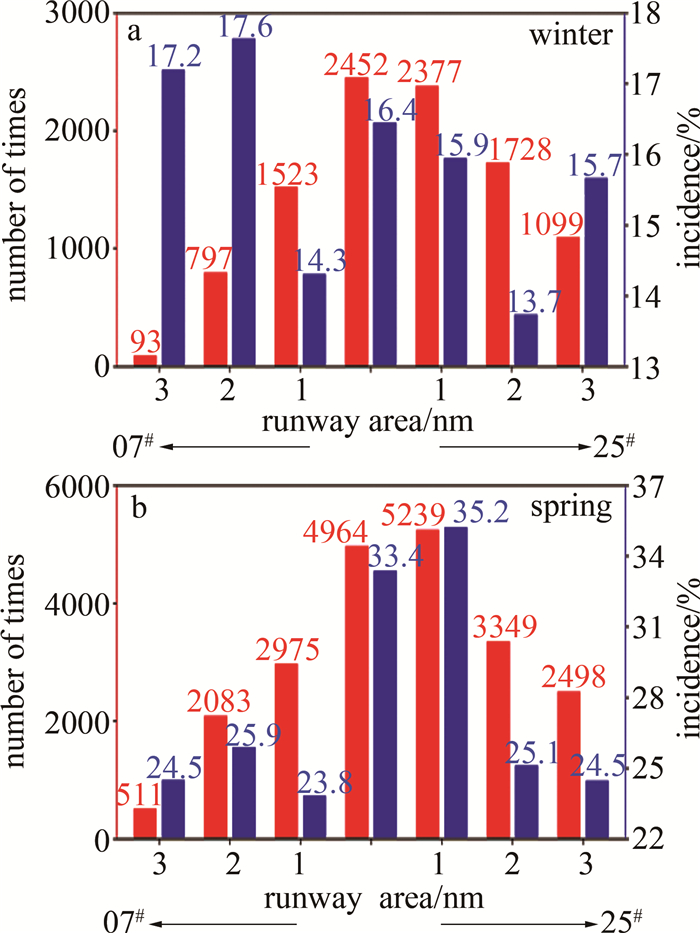
低空风切变在不同区域发生频次的统计结果与激光测风雷达的数据获取情况有关,下面进一步计算不同区域的风切变发生率。发生率为风切变发生频次与雷达数据获取频次之比。
冬、春两季的风切变发生频次及发生率的区域分布结果如图 7所示。跑道左右两侧分别代表 07#和25#跑道前端3 nm的下滑道范围。在冬季,07#跑道前端2 nm和3 nm区域的发生率较高,分别为17.6%和17.2%,但和其它区域差距不大,25#跑道前端2 nm区域为最低的13.7%。春季的风切变发生频次和发生率都高于冬季,分布特征也明显所不同。跑道上空及25#跑道前端1 nm区域的发生率最高,分别达到33.4%和35.2%,相较其它区域约高出10%。在冬季,07#跑道前端下滑道范围内的发生率整体高于25#跑道前端,在春季则相反。

Figure 7. Regional distribution of wind shear frequency (red) and corresponding incidence(blue)
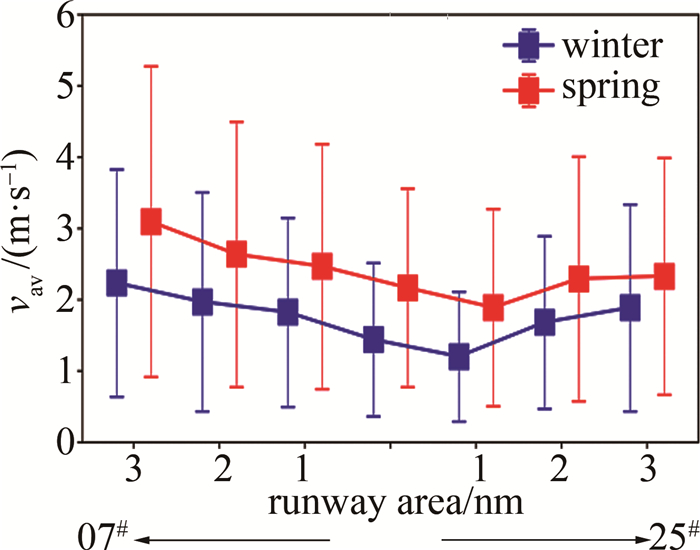
图 8展示了冬、春季节风切变风速的区域统计结果。其中冬(蓝色)春(红色)季节每个区域的统计结果对应一个误差棒图,方形标记为样本平均值,上下横线分别为平均值加减1倍标准差。由图可见,春季平均风速vav的平均值在所有区域均大于冬季,风切变间的风速差异也更大。但两个季节风切变风速的空间变化趋势十分一致,由07#跑道前端3 nm至25#跑道前端3 nm的空间内,vav的平均值和标准差均为先减小、后增大。在07#跑道前端3 nm区域为最大,平均值分别为2.2 m/s和3.1 m/s;于25#跑道前端1 nm区域降至最低,为1.2 m/s和1.9 m/s。这基本符合近地面风速随高度的升高而增大的认识,距离跑道越远,测风位置越高,故风切变的风速及其波动程度也相对较大。
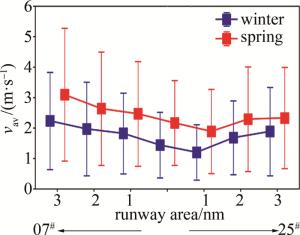
Figure 8. Regional statistical results of the wind speed of wind shears
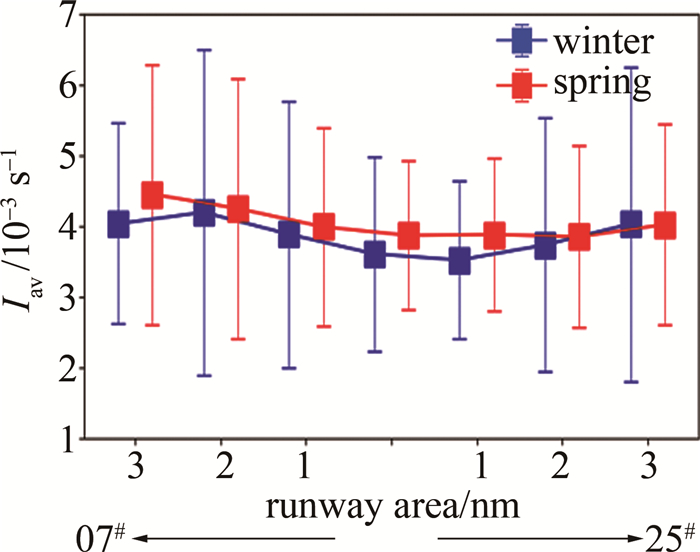
为了探究冬、春两季的风切变在上述7个区域的切变强度情况,对Iav的区域统计结果进行分析。由图 9可见,冬季Iav的平均值约为0.004/s,春季略高,基本不超过0.0045/s,图 9中标记和子图含义同图 8。各个区域风切变的切变强度演变趋势与平均风速十分相似,跑道及25#跑道前端1 nm区域的切变强度为最低,这表明风切变的强度与风速基本呈正相关。值得注意的是,除07#跑道前端3 nm的区域外,冬季Iav的标准差均大于春季,说明冬季风切变间的强度差异更加显著,这与以上冬季风切变的时序统计结果一致。结合上述风切变的时空统计结果来看,07#跑道方向的风切变发生频次略低于25#跑道,但风切变的风速和强度更大。这或许是07#跑道方向有高大山脉具有一定的挡风作用,使该区域的风速更为稳定, 但同时也容易因山体的狭管效应,诱导切变强度较强的风切变事件发生。
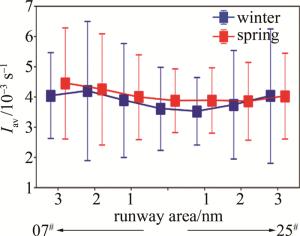
Figure 9. Regional statistical results of average regional divergence value Iav
4.1. 时间分布特征和规律



4.2. 空间分布特征和规律
-
测风激光雷达在低空风切变监测和识别中具有重要的应用潜力和价值。本文中基于测风激光雷达下滑道模式的观测资料,结合航空器报告的风切变相关记录,评估了不同识别算法在乌鲁木齐的实际应用效果。采用识别效果最好的区域辐散法识别了2021—2022年冬春两季的风切变,并对其雷达识别结果的时空分布规律进行了研究。
(a) 利用区域散度法识别机场低空风切变是可靠的,与航空器报告中记录的时间信息和空间位置均有良好的对应,识别成功率为86.7%,漏警率为13.3%。
(b) 春季风切变的发生频次、风速和切变强度均高于冬季。两个季节风切变发生频次的日变化均为先增大后减小,且都在14:00—16:00时达到最高。冬季风切变的高发时段为14:00—18:00,春季则为更长的12:00—20:00。风切变的风速在冬、春两季均于12:00—16:00时达到最低值。春季风切变强度的日变化趋势相对于冬季更为稳定,切变强度较小的风切变发生的频次远高于切变强度很大的强烈风切变。
(c) 冬季07#跑道前端下滑区域的风切变发生率为17.6%;春季25#跑道前端下滑道区域的发生率可达到35.2%。冬季风切变的风速约为1.8 m/s,春季则上升至2.7 m/s。冬季平均区域散度值Iav也低于春季,Iav分别在0.004/s和0.0042/s左右,但冬季Iav的波动程度大于春季。
(d) 综合时间和空间的角度来看,25#跑道前端下滑道的风切变发生频次更高,但07#跑道前端下滑道的风切变风速和切变强度更大。机场根据风切变的发生规律,在不同季节、不同时刻进行合理的航班安排,开展更加科学的风切变预警工作,能够在一定程度上减小风切变带来的危害。
 DownLoad:
DownLoad: