 Map
Map




HTML
-
光电精跟踪系统是星间激光通信、光电对抗、精确制导、侦察告警等装备的重要部件[1-3]。其基本原理是通过接收光学天线以及成像组件,连续快速获取跟踪目标的可见光或者红外波段的图像[4-6]; 通过配置了特定算法的嵌入式软、硬件模块对该图像进行实时计算处理,以提取目标在视场中的坐标变动量,也称作脱靶量[7-9]; 该脱靶量被实时传送给控制模块,作为引导值来控制一个高速高精度执行器件,也称控制器,通常是一个快反镜,使之控制成像光轴做反向相对运动,从而实现对目标的高速精密跟踪。该方法具有抗电磁干扰能力强、隐蔽性好、以及跟踪精度高、速度快等优势。
光电精跟踪系统的延迟是一个重要指标,直接影响系统跟踪的效果。要缩短光电精跟踪系统的延迟量,提高跟踪系统的动态特性,需要采用高速图像传感器压缩曝光或者积分时间、改进图像处理算法并提高嵌入式图像处理模块的计算速度,以压缩信号处理延迟量,使得控制系统具有稳定相位裕量。参考文献[10]~参考文献[12]中采用中值滤波与形态滤波对目标进行增强,然后计算目标的质心,进而提高了目标的提取精度和跟踪的鲁棒性,但会使得目标检测算法变得更加复杂,进而延长了计算时间。参考文献[13]~参考文献[15]中提高了采样频率,同时减少了图像传感器的曝光时间,进而减低信噪比,提高检测精度,但是降低了系统的稳定性。
压缩光电精跟踪系统延迟量的另一个有效途径是采用具有高动态特性的执行器件——快反镜(fast steering mirror, FSM),并通过改进的控制算法来提高其控制性能。参考文献[16]~参考文献[18]中采用模型参考算法来优化比例-积分-微分(proportion-integration-differentiation,PID)参数,但是算法的实现较为困难,并且性能提升不明显。参考文献[19]~参考文献[21]中采用模糊控制算法来选择最佳的PID参数,提高快反镜的动态响应,相反的是算法消耗的逻辑资源较多,实现补偿的延迟不明显。
常规PID反馈控制只有在偏差产生之后才对被控制参数进行调节,当扰动量的变化已经发生时,被控参数没有改变,控制器不会产生校正作用,这时整个跟踪系统都会具有较大延迟特性,控制系统的动态特性会出现抗干扰能力差、调节时间长及跟随误差大等缺点。因此想要提高系统的跟随性能,在系统的反馈控制回路中加入前馈通路,构成前馈控制和反馈控制相结合的控制系统,会极大地减少延迟特性,提高系统的跟踪性能。
综上所述,本文作者尝试在精跟踪控制器——快反镜的控制回路中设置前馈环节,通过预先调节的方式来改善光电精跟踪系统的迟滞特性,从而改善其闭环跟踪特性。
-
现代光电精跟踪系统通常包括光学天线、光束方向控制器(精跟踪执行器件)、高速图像传感器、嵌入式图像处理模块、中心控制器以及驱动控制模块等,如图 1所示。光学天线将目标捕捉到视场范围内,高速图像传感器采集目标图像,并将图像数据传输给嵌入式图像处理模块。嵌入式图像处理模块接收图像数据之后,提取图像中目标的中心位置,传输到驱动控制模块。驱动控制模块控制光束方向控制器做出相对运动,使得运动目标相对于视场稳定,即达到跟踪目的。
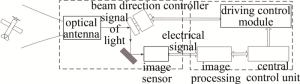
Figure 1. Opto-electronic fine tracking system
通常,光束方向控制器是一个响应速度快、指向精度高的快反镜,可以由音圈电机、压电陶瓷、磁致伸缩等执行元件驱动。一般快反镜的物理结构由柔性支持结构、反射镜、快反镜支架、快反镜基座、转角测量传感器、音圈电机以及主控模块等组成,如图 2所示。

Figure 2. Composition of FSM
音圈电机输出电磁力,通过非接触推-拉方式给出力矩,使得负载反射镜旋转,一般其数学模型可抽象表述为图 3所示模型。图中,s为拉普拉斯变换的变量参数,u为输入的电压,L为线圈的电感,R为线圈的电阻,i为线圈的电流,Kt为电磁扭矩常数,Ke为反动势系数,Tm为电机输出扭矩,Jm为电机的转动惯量,Bm为电机黏性阻尼系数,θm为电机转角,Ks为柔性铰链的弹性系数。
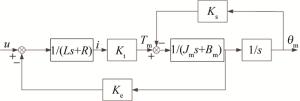
Figure 3. Mathematical model of voice coil actuator
可以推导得出快反镜的传递函数为:
由于电机的电感非常小,因此经常忽略不计,所以(1)式可以化简成:


-
在闭环控制系统中,反馈控制仅在产生偏差时才对控制参数进行调节,具有一定的延迟特性,而前馈控制是在系统的输入端直接对控制器进行调节,具有预见性,可以提高系统的动态响应速度,如图 4所示。
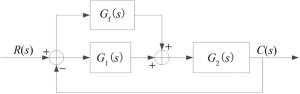
Figure 4. Block diagram of feedback forward control
前反馈控制的传递函数为:
式中, Gf(s)表示前馈控制器,G1(s)表示PID反馈控制器,G2(s)表示快反镜的控制函数,R(s)表示输入,C(s)表示输出。从理论上分析,当Gf(s)=1/G2(s),即H(s)=1,则使得系统的稳态误差为零,并且可使输出复现输入信号。
位置前馈控制实际上是将输入信号的1阶微分和2阶微分信号作为系统的输入控制变量,并结合反馈控制来获得更好的动态响应和延迟特性。位置前反馈控制可等效成如图 5所示的控制环节。
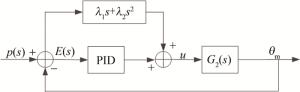
Figure 5. Control block diagram for position feedback forward
位置前馈控制器的传递函数可以表示为:
式中,U(s)为电压的拉普拉斯变换,kp为比例系数,Ti为积分时间常数,Td为微分时间常数,E(s)为误差的拉普拉斯变换,λ1为1阶微分系数,λ2为2阶微分系数,p(s)为位置的拉普拉斯变换。在数字控制系统中,须将(5)式离散化,可简单表示为:
其中,
式中, y1(k)为位置环PID的差分方程,y2(k)为前馈速度环的差分方程,y3(k)为前馈加速度环的差分方程,p(k)表示在第k个采样周期的采样位置输入,e(k)表示在第k个采样周期的采样位置偏差,U(k)表示在第k个采样周到的电压值,T表示为采样周期。
常规PID控制模式下,光电精跟踪系统的延迟特性不可忽略。为此,建立目标位置与音圈电机转角之间的关系,在快反镜闭环控制回路中设置位置前馈环节,从而实现预先修正。如图 6所示,控制系统的输入p0是采集图像中所需跟踪的目标位置坐标,也是图像控制环的输入,通过PID控制器,输出预期的位置,反馈回路是图像目标跟踪的位置信息p2, 位置控制环的输入是位置p1,通过PID控制器和位置前反馈控制,输出为音圈电机的电压u,反馈回路是音圈电机的转角信息。
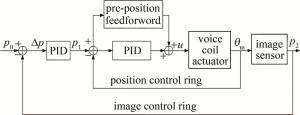
Figure 6. Feed forward-feedback control of the FSM



-
为验证上述方法,搭建如图 7所示的测试系统。系统包括一个模拟目标的激光器和两个快反镜:其中一个用于控制激光光斑运动,从而模拟跟踪目标的运动;另一个则用于控制成像光束的高速运动,以锁定目标;系统还包括成像镜组、高速图像传感器、图像处理电路、上位机及快反镜控制器等。其中快反镜的口径为25.4 mm,扫描范围±3600″,快反镜控制器基于TMS320F28335处理器的嵌入式数字控制器;图像处理电路以KINTEX-7FPGA为核心;图像传感最大分辨率为1280×1024,像素大小为4.8 μm×4.8 μm,数据传输率为620 Mbit/s,在全分辨率条件下可以达到每秒150帧图像的采集速度,且帧频可调。设定音圈电机位置环的PID系数分别为Kp=0.33,Ki=0.015,Kd=0.00145,1阶前馈参数λ1=0.045,2阶前馈参数λ2=0.00003。
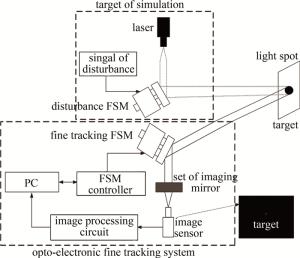
Figure 7. Experimental test system
目标模拟激光器的出射光经扰动快反镜反射后照射目标靶,扰动快反镜改变激光束方向,使得目标靶上光斑运动,模拟运动目标。高速图像传感器采集光斑图像,图像处理电路实时计算光斑位置的变动量,即脱靶量。将该脱靶量反馈给快反镜控制器,实时控制精跟踪快反镜随动,使得目标光斑相对于视轴稳定。
为了缩减图像处理电路所需实时处理的数据量,缩短计算处理时间,一般需要对所采集的图像进行开窗处理。开窗大小默认为1280×1024,通过上位机给图像处理电路发送开窗命令,使得开窗大小为640×480。其次,调整开窗的起始位置和结束位置,使得目标位置位于视场中心,实现目标锁定。
利用频谱分析和伪随机噪声的方法辨识精跟踪快反镜参数,可得到快反镜的实际传递函数,如下式所示:
-
上位机下达指令,重复性地下达位置数组,引导系统做摆动幅值为60″、频率为1 Hz的周期性往返运动。随后改变运动指令与引导数据,使得系统运动频率从1 Hz~60 Hz逐步提高,同时检测运动幅值随着频率的变化,算出系统闭环控制带宽。
分别对常规PID控制方法和前馈-反馈控制方法进行测试。测试结果表明,对于常规PID控制方法,当运动频率为20 Hz时,运动幅值下降到原先的0.707倍(-3 dB)的值为84.6″,如图 8a所示;对于所实施的前馈-反馈控制方法,当输入运动频率达到45 Hz时,运动幅值才下降到84.5″(-3 dB),如图 8b所示。即系统带宽从20 Hz提升至45 Hz,系统的动态响应特性得到了成倍的提升。

Figure 8. a—bandwidth test results based on the PID control method b—bandwidth test results based on the feedforward-feedback control method
-
从上位机发送指令使得光电精跟踪系统做周期性往返运动,运动频率50 Hz、振幅100″。如图 9所示, 分别采用常规的PID控制法和前馈-反馈法来控制精跟踪快反镜,并测试系统响应的时间延迟。可以看出,上述引导频率与振幅下,常规PID控制时时间延迟为2.9 ms,对应相位延迟52.2°;采用前馈-反馈控制法时时间延迟0.8 ms,对应相位延迟14.4°。相比于常规的PID控制方法,前馈-反馈控制法使得系统响应时间延迟特性得到了明显的改善。

Figure 9. a—delay test results based on PID control method b—delay test results based on feedforward-feedback control method

3.1. 带宽测试

3.2. 延迟测试

-
采用前馈-反馈控制方法来改进控制光电精跟踪系统的快反镜,即在系统控制回路中设置前馈通路,通过预先调节的方式来减小光电精跟踪系统的迟滞,改进光电精跟踪系统的动态响应特性。搭建了包括目标模拟、目标成像探测与识别、目标快速跟踪等功能部件的实验系统进行了实验测试。实验中测得系统延迟由2.9 ms缩短至0.8 ms,系统带宽由20 Hz提高到了45 Hz,表明该方法可以大幅压缩光电精跟踪系统的时间延迟,提高系统带宽。
 DownLoad:
DownLoad: