 Map
Map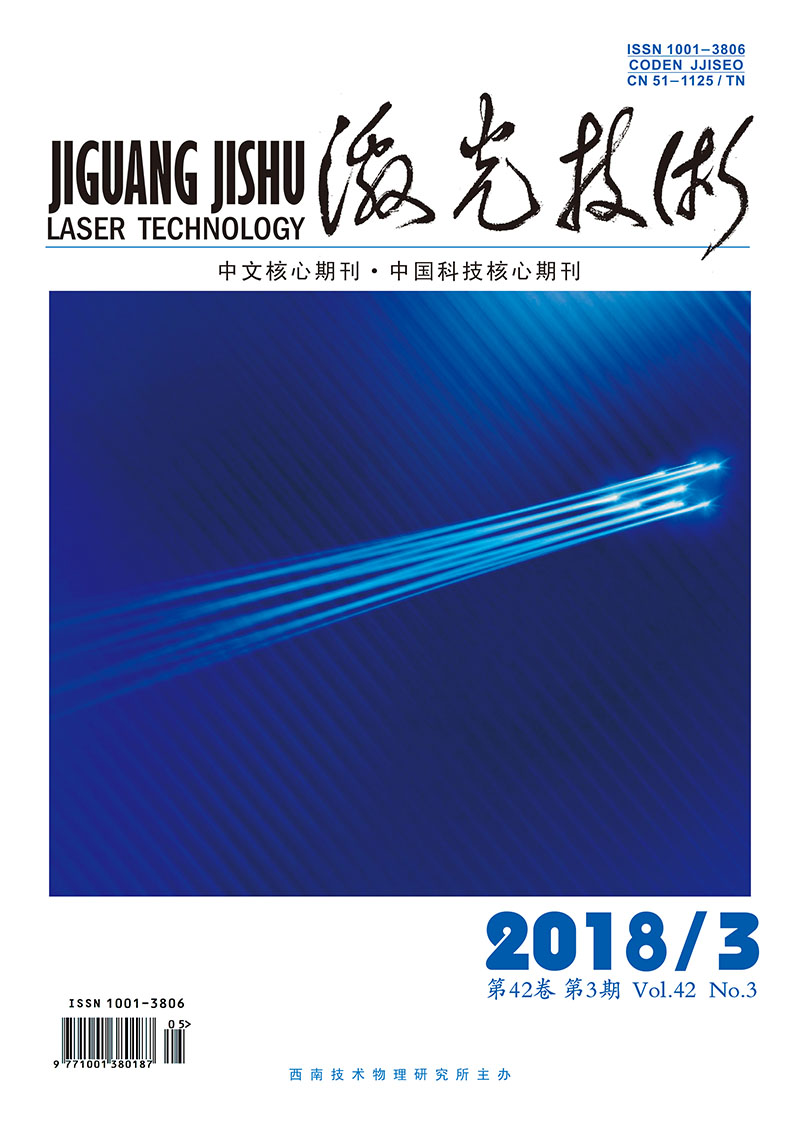




HTML
-
无人机(unmanned aerial vehicles,UAV)是一种由内嵌程序智能控制或无线电设备远程遥控,以执行军事作战任务或者相关民用任务的非载人飞行器。目前用于航拍的无人机日益增多,不仅越来越多的企业开始进军无人机市场,而且军用无人侦察机也在战场上发挥着越来越重要的作用,未来无人机领域的高速发展已成定局。然而无人机面对同一个挑战,那就是工作时间短、续航能力差。为了延长无人机的续航时间,空中加油、采用新型燃料电池以及使用太阳能供电等多种方案被提出。本文中提出一种新型的激光无线供能技术。其一,与空中加油相比,激光供能不仅适用于大型无人机,也适用于小型无人机,而前者则只对大型无人机有较好的实用性并且在战场容易使目标暴露;其二,与采用新型燃料电池相比,激光供能可以持续进行,且激光具有很高的功率密度,在光电池面积足够的情况下,可以同时供给无人机工作用电以及对内置蓄电池的充电,而新型燃料电池的能量密度则不能无限提高;其三,太阳能确实是一种取之不尽用之不竭的绿色能源,然而其受天气影响严重,而且功率密度较低,供给无人机使用时必须采用很大面积的太阳能电池板,而小型无人机是难以负载如此大面积、高质量的电池板的。相较而言,激光传能受天气因素影响较小,尽管大气对激光有一定的削弱作用,但其仍能够保留足够的能量供无人机运作,同时激光具有极高的能量密度,选用合适的光伏电池,将有可能实现对强激光进行小面积接收,更加适合于小型无人机的携带使用[1-3]。
国内外的学者和机构对激光无线供能也有相应研究。2003年,美国国家航空航天局在室内完成了激光对小型飞行器充电实验。2006年, 日本Kinki大学利用激光驱动机器人的手臂和手指运动。2007年,欧洲宇航防务集团利用激光远程充电的方法,为与激光器相距250m的微型船实施了电力传输。2012年,美国激光动力公司和洛马公司在风洞内验证了一种激光充电系统,成功地将“潜行者”无人机系统的连续飞行时间延长到了超过48h。2016年10月,俄罗斯航天科研机构火箭航天集团公司利用激光远距离无线传输电能,已成功为手机充电,充电距离为1.5km[4-9]。本文中将激光供能技术与激光跟瞄技术相结合设计了无人机激光跟踪与供能系统,阐述了该系统的主要原理并通过实验验证了该技术可用于无人机续航。
-
无人机激光跟踪与供能系统主要由地面端的激光跟踪、能量发射系统和机载端的激光接收与能量转换系统组成。地面端系统主要包括:激光发射控制单元、传输光路和捕获、瞄准、跟踪(acquisition,pointing, tracking,APT)单元。机载端系统主要包括:合作目标(角反射器或反射膜或引导灯)、激光接收模块以及充电电路模块。整体框图如图 1所示[10]。系统工作原理为:激光经过传输光路准直后进入激光跟瞄系统,通过计算机软件控制激光振镜的折转镜偏转对激光进行发射,无人机机载光伏电池接收光能并转为电能,通过电源管理系统,一部分供给无人机或机载用电器使用,一部分储存在机载锂电池中。

Figure 1. Overall block diagram of laser tracking and energy supply system of UAVs
激光跟瞄系统的基本原理是利用反射片将入射光线沿着与入射平行方向反射回发射处的特点,在与发射激光器同轴方向放置相机,反射光束将在相机上成像,形成光斑,光斑的坐标位置可以转换为反射片与相机的相对角位置。根据该原理,在无人机上贴反射片,在地面端放置激光器、快速扫描器以及与扫描器同轴的高帧频互补金属氧化物半导体(complementary metal oxide semiconductor, CMOS)相机。快速扫描器是由微型计算机控制激光振镜形成“回”字型方式对目标区域进行扫描,在无人机进入扫描窗口后,开启激光器和激光快速扫描器,对窗口进行激光扫描,一旦有激光照射到角反射器,高帧频CMOS相机便可捕获到反射激光,进而获取无人机的相对角位置信息。利用该角信息来控制激光扫描跟踪器的偏转角度,便可实现无人机的主动跟踪[11]。根据以上原理设计了以微型计算机作为数据处理和控制平台、数/模控制卡和激光振镜作为跟踪控制的驱动器和控制器、高帧频CMOS相机作为飞机坐标捕获器的跟瞄系统。组成框图如图 2所示。

Figure 2. Block diagram of laser tracking system

-
首先通过无人机上的全球定位系统(global positioning system, GPS)或者引导灯获取到无人机的大概位置区域,对该区域进行“回”字形扫描,当激光扫描到无人机上的角反射片时,反射光束将在相机上成像。CMOS相机在获取图像后需要把感兴趣的目标提取出来,即图像分割。同属于一个区域的像素在同一幅原始图像中应该有相同或差不多的属性与特点,不同区块的像素特点应该有所差异。所以图像分割的目的就是要找寻到这区域最具特色的属性,利用这种属性将整幅图像分割成区域内属性相同的几块图像。当只能利用一个属性条件时,属性阈值的确定成了图像分割的关键性问题。基本的阈值分割方法有P参量法和状态法(峰谷法),这里利用峰谷法确定阈值t之后,利用公式来进行阈值分割,其中f(i, j)为像素点(i, j)的灰度的值。
经过图像分割把信标光斑和背景完全分隔开来,然后进行目标定位,进而解算出目标坐标值,提供给APT执行系统使用。普遍使用的定位算法有质心法、形心法、峰值定位法、边缘定位法、自相关定位法以及高斯曲面拟合法。综合考虑定位精度和运算量两方面因素,设计选用质心定位法。质心相对于图像分割后的光斑来说便是光斑的灰度值中心,这种算法定位精度高、计算简单、运算量小、响应速度快,被广泛应用在定位目标的过程中。假设目标区域具有N×M个像素点,图像中目标的像素点(i, j)的灰度的值为f(i, j),坐标值为(xij, yij),则可以得到质心坐标(xc, yc)为:
-
得到了目标在CMOS像面成像的位置信息后,当物距远大于相距时,根据镜头成像近似公式fW=wL,其中f为镜头的焦距,w为被摄物体在CMOS采集阵列上的成像宽度,W为实际物体的宽度,L为被摄物体距离镜头的距离,即可计算出目标偏离系统中心的水平和竖直角距离。进而解算出振镜应该偏转的角度,激光应指向的角度为${\theta _x} = {\rm{arctan}}\left( {\frac{{{w_x}}}{f}} \right) $, ${\theta _y} = {\rm{arctan}}\left( {\frac{{{w_y}}}{f}} \right) $, 其中θx和θy为振镜将激光朝x,y轴方向偏折的角度,wx和wy为目标质心偏离CMOS中心的像素数目与像素尺寸的乘积。则控制振镜旋转角度的电压值V=θ×γ,其中,V为电压值,θ为由计算得到的x轴、y轴振镜应当偏转的角度,γ为振镜每伏特电压转过的角度值。通过程序把V值计算出来后传递给数模采集卡,数模卡控制振镜偏折激光光路,使其保持对目标的跟踪充能状态。
振镜是由x, y两个轴上的偏转镜片(反射镜、扫描电机)和伺服电路以相同的两部分垂直安装而成。反射镜安装于扫描电机的运动轴上,电机转动从而带动反射镜角度偏转。扫描电机不可以旋转,只能在有限角度内偏转,它内部安装有位置传感器用来实时监测扫描电机的偏转角度。伺服电路用来接收驱动器发过来的电压脉冲信号,从而控制扫描电机按照预设角度偏转,进而实现激光瞄准目标[12]。
振镜折转光路的原理如图 3所示。图中,e为x轴和y轴两个振镜安装距离,d为y轴振镜中心到扫描平面中心的距离,θ1为x轴振镜旋转的角度,θ2为y轴振镜旋转的角度。激光光束经过安装孔从x轴振镜入射,反射到y轴振镜上,然后y轴振镜反射使激光出射,投射到待扫描平面内的任意一点P(x,y)。可以很容易地解算出P(x,y)与两个振镜偏转角度的关系[13]:

Figure 3. Working principle of laser galvanometer
由此,若已知被跟踪点坐标值,可以很轻易解算出振镜应当偏转的角度,用来瞄准和跟踪目标。
-
无人机上的机载光伏电池将接收到的激光转换为电能输出,目前市面上光电转换效率最高的是砷化镓电池,其最高光电转换效率可达51%,单位面积最高输出功率可达10W/cm2。合理高效地采集并储存这些电能对系统整体光电转换效率有较大影响。根据图 4中光伏电池的电流-电压(I-U)曲线图可知,光伏电池的输出功率与其外加负载的等效阻值有很大关系,只有当外负载与光伏电池内阻相匹配时,光伏电池才能以最大功率输出。然而受到光伏电池的温度改变、老化、尘埃影响,以及激光跟踪过程中的不规则抖动与传输过程中的大气情况不同,均会导致光伏电池的内阻发生改变,在这种情况下,固定的外负载不可能始终获得光伏电池的最大功率输出[14-16]。

Figure 4. I-U curve of photovoltaic cell
本实验中采用扰动观察法的最大功率点跟踪(maximum power point tracking, MPPT)控制算法对砷化镓光伏电池进行最大功率输出。如图 4所示,Pmax为光伏电输出的最大功率,VMP与IMP为最大功率时对应的电压与电流,VOC与ISC为光伏电池的开路电压与短路电流。光伏电池在特定的光照与温度条件下其输出功率曲线是单凸峰形的,即可以通过控制光电池输出电压,使之工作在最大功率点上。实际操作均采用升压电路实现最大功率点跟踪,通过改变升压电路开关控制信号的占空比,给光伏电池的输出电压一个单向的扰动,测试其输出功率的变化,若功率P变大,则继续给以同向扰动,直到输出最大;若P变小,则改变扰动方向,也可使得输出最大[17]。
经过最大功率点跟踪电路后一部分电能给机载设备供电,另一部分存入机载电池中。目前无人机通常用锂电池作为储能电池,而锂电池的特性决定了其不能通过简单的充放电模式工作,大电流过放过充会使电池内压升高,正负极活性物质的可逆性收到破坏,导致电池容量明显衰减,减少电池寿命。因此,在MPPT电路后选择恰当的电源管理电路有利于提高系统整体工作性能。
2.1. 图像处理部分
2.2. 相机与振镜控制部分

2.3. 无人机能量接收系统

-
利用上述实验终端在武汉大学教学楼与操场间完成了外场无人机激光无线供能的实验,实验过程中无人机飞行高度为30m~35m,飞行距离为100m~200m。飞行速率约为2m/s(20mrad/s)。CMOS相机分辨率为752×480,焦距为25mm,像素尺寸为6μm,其对应视场角为180.4(H)mrad×115.2(V)mrad。整个视场内激光束跟踪精度分布图如图 5所示。
Figure 5. Distribution diagram of laser beam tracking accuracy
在x方向上,跟踪偏移的标准差为122.8μrad,最大偏移量为358μrad;在y方向上,跟踪偏移的标准差为97.6μrad,最大偏移量为275μrad。整个视场中最大偏移量为451μrad,最小偏移量为5μrad。实验过程中充电指示灯长亮,表示无人机飞行过程中充电未中断过。
同时在室内6m处用移动架模拟无人机运动进行来充电效率测试实验,实验过程中把机载充电系统放在移动架导轨上进行实验,并在MPPT电路输出端放置了小灯泡模拟负载进行实验,实验结果如表 1所示。
photovoltaic cell to MPPT MPPT to battery voltage 2.81V 4.60V current 217mA 112mA power 609.8mW 515.2mW effectiveness 30.5% 84.5% Table 1. Simulation experiment of moving frame within 6m indoor
实验过程中激光器输出光功率为2W,接收光电池采用3串3并的形式。测得光电池输出功率为609.8mW, 光电转换效率为30.5%。经过MPPT电路后灯泡模拟负载功率约为515mW,MPPT模块转换效率为84.5%。
系统整体光电转换效率η=(1-η1)(1-η2)η3η4,其中η1为大气损耗,η2为APT系统损耗,η3为光伏电池光电转换效率,η4为充电电路转换效率。从表 1可知,η3=30.5%,η4=84.5%。
在150m的距离时,根据图 5中的跟踪精度标准差计算出光斑偏离目标中心x方向1.5cm,y方向1cm,此时APT系统损耗η2≈50%。根据大气损耗链路分析公式可知, 808nm波段激光在100m~200m的范围内大气损耗η1 < 5%可忽略不计,所以系统整体转换效率η=(1-η1)(1-η2)η3η4≈12.8%。

-
设计了一套APT系统来完成无人机激光跟踪与无线供能实验,并通过实验验证了该系统可用于对飞行中的无人机进行无线续航,给无人机充电提供了一种新的思路。但由于光伏电池面积很小,APT系统跟踪误差相对偏大使得系统整体光电转换效率偏低。接下来研究过程可考虑增加2维转台来扩大充电范围并对无人机进行粗跟踪来降低充电精度,同时研究远距离无信标跟瞄难题使该技术实用化。
 DownLoad:
DownLoad: