 Map
Map




HTML
-
风是大气气象重要要素之一,对人类的日常工作及工农业生产、军事活动等都有重要的影响,对风场的准确测量,是气象观测的一项重要工作。传统风场测量仪器有微波气象雷达、声雷达、探空仪等设备,而激光相干测风雷达与传统测风仪器相比,具有高精度、高时空分辨率等特点,被广泛地应用于低空大气风场的测量。
激光测风雷达的工作原理是将激光发射到目标空域,沿光束传播途径上运动的气溶胶粒子会对激光脉冲产生后向散射效应和多普勒频移。测风雷达通过接收带有多普勒频移的散射光回波,对其进行光电转换和信号处理,并从中检测出多普勒频移,最终推算出激光视线方向上的风矢量信息。而要得到所要求的3维风场信息,则需再对风场进行反演运算。因此,径向风速的反演算法尤为重要。在风场反演方法中,速度方位显示法[1](velocity azimuth dispaly,VAD)和多普勒光束摆动(Dopplor beam swinging,DBS)四波束合成解算法因为运算量小且计算简单等特点被广泛应用。
激光多普勒测风雷达探测到的风矢量为径向速度分量,当仰角固定时,径向速度在以雷达为中心的等距离圈上随方位大致呈简谐曲线分布,简谐曲线的振幅和位相反映了雷达扫描范围内的风速和风向,因此,要求激光测风雷达工作时须严格水平安装。另一方面,激光测风雷达因其体积小、机动性强等特点,在车载或其它机动性设备中被广泛应用,因此其机动性受地形因素影响很大,导致雷达在使用过程中难以保持水平,这样测出的风场数据则与真实值之间存在误差。本文中通过引入空间几何学的方法,利用空间坐标变换,对雷达倾斜后的风场误差进行修正。
-
由于激光测风雷达直接探测得到的径向风矢量为沿扫描光束方向的风场分量。因此,需要选取适当的方法对径向风速进行反演。风场反演算法在国内外被普遍应用,在20世纪60年代速度方位显示方法由LHERMITTE提出,之后由BROWNING等人将其完善[3]。到20世纪70年代,在局部地区均匀风的条件下有人提出了速度体积处理技术,但此方法需要进行体扫,运算量大,分辨率也只有10m。到21世纪,由NEWSOM和BANAKH等人提出并改进了DBS四波束合成计算的方法[4-6],此方法至今仍被广泛运用。而在国内风场反演方法发展也十分迅速,JIANG[7]和QIU[8]等人分别提出了涡度-散度方法和简单伴随函数方法,对风场反演技术的发展提供了支持。
现阶段风场反演算法以速度方位显示和DBS四波束合成计算两种算法居多,两种算法均基于假定风场稳定的情况下对风场进行多波束扫描,再通过反演计算得到高精度的风速风向信息,并计算出垂直气流信息。
-
VAD风场反演算法的基本原理是假定在均匀风和线性风的条件下,利用雷达在某一固定仰角上作360°的全方位圆周扫描,获取不同方位上的径向风速值后, 把一系列的径向风速拟合为方位角的余弦函数,最后求得扫描区域内的平均风场。所拟合的3个参量代表 3维风场信息[9-12]。激光光束的扫描方式如图 1所示。
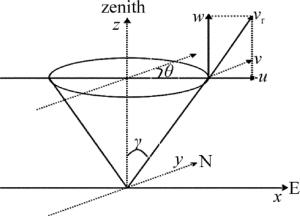
Figure 1. Theory of VAD scanning
设风矢量为(u, v, w),在雷达直角坐标系中:u沿着x轴,v沿着y轴,w沿着z轴,圆锥扫描半角γ是激光束指向与z正轴的夹角,扫描方位角θ以x坐标正轴为0°起点。
选取正东方向为x轴正向,正北方向为y轴正向,测得的径向风速为vr,水平风速为vh和垂直气流为w,则有:
式中,γ为圆锥扫描半角。
根据扫描角θ,水平风速vh可由水平分量u和w合成,则得到公式:
将(2)式带入(1)式,可得:
令$a = \sqrt {{u^2} + {v^2}} $,由(3)式得:
式中,$b = \sqrt {{u^2} + {v^2}} \sin \gamma , c = w\cos \gamma $。
综上推理,VAD扫描方式中,每一个高度层都对应一个余弦曲线,余弦曲线的振幅、相位、偏距等参量均包含了水平风速、风向以及垂直气流等信息。
-
DBS原理即用四波束合成计算方法进行风场反演。DBS四波束扫描过程中,假设风场矢量保持不变,如图 2所示。设风矢量为(u,v,w),在雷达直角坐标系中:u沿着x轴,v沿着y轴,w沿着z轴,圆锥扫描半角γ是激光束指向与z正轴的夹角,扫描方位角θ以x坐标正轴为0°起点。
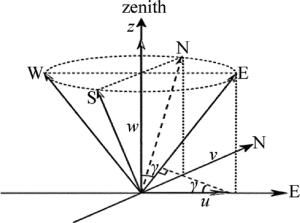
Figure 2. Theory of DBS scanning
径向风速与风向矢量的关系可表示为:
设4个方向测得的径向风速分别为vr, 1,vr, 2,vr, 3,vr, 4,对应的方位角分别为θ1,θ2,θ3,θ4,则有:
对于激光雷达,4个扫描方位角与N,E,S,W这4个方向对准,即θ1,θ2,θ3,θ4,分别为0°,90°,180°,270°。
则(6)式可简化为:
进而推导出:
-
可以看出,VAD和DBS原理均在雷达水平放置的情况下来进行风速测量和风场反演。而当雷达随其放置载体(例如车载雷达)经过各种地形时,会遇到上坡、下坡、转弯等各类状况,使得测风雷达不能保证时刻处于水平状态进行测量,导致风场反演结果与真实情况不符。如图 3所示,其中箭头为假定水平风和垂直气流。
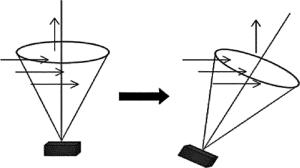
Figure 3. Contrast before and after lidar tilt
1.1. 速度方位显示风场反演原理
1.2. 多普勒光束摆动四波束合成计算风场反演原理

1.3. 现有风场反演算法的局限性

-
假定雷达在车体上放置时与车体底盘平行,则由车体倾斜而引起的雷达相对于水平地面的倾斜方向与车体一致。雷达倾斜示意图如图 4所示。
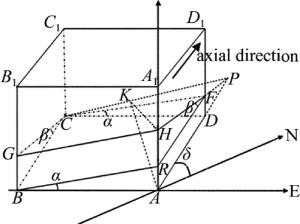
Figure 4. Schematic diagram of lidar tilt
当车体沿轴向方向倾斜,用β表示,β>0°表示朝前倾斜,β < 0°表示朝后倾斜;车体垂直于轴向方向倾斜(横向倾斜),用α表示,α>0°表示朝右边倾斜,α < 0°表示朝左边倾斜。
由于雷达倾斜的角度与车体倾斜角度相一致,因此雷达倾斜情况同样为:横向倾斜α,轴向倾斜为β,由此相关计算如下。
如图 4所示,设立方体ABCD-A1B1C1D为雷达,AD方向为雷达轴向,ABCD所处平面为水平地面,雷达D处为车头一侧,车体经横向倾斜α,轴向倾斜β以后,使雷达到达GHFC位置,于是:∠ABE=∠DCF=α,∠EFH=∠BCG=β。
设立方体边长为1,由于BRFC为平行四边形,所以EF⊥AA1,又由于平面BRFC绕着轴CF旋转β角到达位置GHFC,易知GHFC为平行四边形。
延长HF与AD的延长线交于点P,连接C和P,过点H做HK⊥CP,连接A和K,则∠AKH为平面GHFC与平面ABCD的二面角。
因为正方体ABCD-A1B1C1D棱长为1,所以有AE=ABtanα=tanα,经计算,可求出:
因此,车体倾斜的角度为:
同理可得,倾斜方向与车体轴向的夹角为:
由于雷达倾斜具有一定的方向性,通过分析可知:
(1) 当α≥0°, β>0°时:
(2) 当α≤0°, β>0°时:
(3) 当α≤0°, β<0°时:
(4) 当α≥0°, β<0°时:
(5) 当α=0°, β=0°时:

-
当雷达与正北方向成γ角,同时自身倾斜角度为θ时,设原坐标系中的风矢量为(u, v, w),倾斜后新坐标系中的风矢量为(vx, vy, vz),${v_{\rm{h}}} = \sqrt {v_x^2 + v_y^2} $为倾斜以后测得的水平风速值的大小,ξ为倾斜后测得的风向的值,vz为倾斜后测得的垂直气流,如图 5所示。A为倾斜前的水平面,B为倾斜以后的面,OP为倾斜方向,O′P为OP在A平面内的投影。
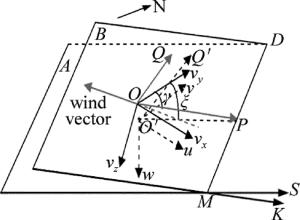
Figure 5. Transformation of wind field between the horizontal plane and the inclined plane
vx-O-vy和u-O′-v都为地理坐标系(原点与雷达重合,vy轴和v轴指向正北方向,vx轴和u轴指向正东方向,vz轴和w轴指向垂直向下方向)。
则在vx-O-vy平面内,以OP为x轴,OQ为y轴建立新的直角坐标系,将风矢量为[vx, vy, vz]重新分解,如图 6所示。
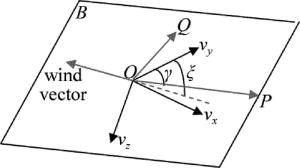
Figure 6. Wind speed decomposition in the inclined plane
(1) 当ξ≥γ时,风矢量与倾斜方向的夹角为π-(ξ-γ),水平风速在OP轴和OQ轴上的分量分别为:
(2) 同理,当ξ < γ时,水平风速在OP轴和OQ轴上的分量分别为:
可见,无论ξ与γ的关系如何,水平风速在OP轴和OQ轴上的分量计算结果相同,即:
同理,在u-O′-v平面内,如图 7所示。以O′P为x轴、O′Q′为y轴建立新的直角坐标系,则由图 4可知,∠OPO′=θ,O′P与v轴正向的夹角为γ。
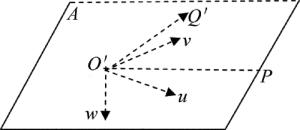
Figure 7. Wind speed decomposition in the horizontal plane
经计算可得:
将图 7中坐标系POQ-vz与坐标系PO′Q′-w相互叠加,使原点重合,得两坐标系的关系如图 8所示。其中,M代表的是原来的O和O′,MS代表O′P,MK代表OP,MD代表O′Q′和OQ,可得到:
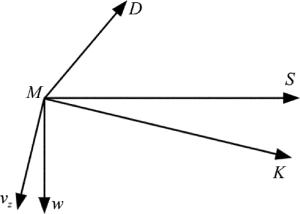
Figure 8. Coordinate system after origin coincidence
进而由(20)式和(21)式可推导出:
对于风向计算,设倾斜前风向为ξx,k为中间变量,则相关计算如下:
从而推导出:
最后通过ξx×180/π将风向由弧度换算为角度便得出风向信息。
在雷达随车体横向倾斜α、而轴向倾斜β后,雷达沿着与车头方向夹角为∠PAK的方向倾斜∠AKH。如果已知雷达所在车体轴向与正北方向的夹角为δ的话,则倾斜方向与正北方向的夹角为γ=δ+∠PAK,(vh, ξ, vz)分别为倾斜后测得的水平风速、风向、垂直气流,则可推出真实的水平风速为:
修正后垂直气流(即倾斜以前的垂直气流)为:
在雷达倾斜的情况下(倾斜角度在10°以内),对于垂直气流测量的影响较大,而对水平风速风向的影响并不大[13](将在下一节的实验例证中运用数据对比曲线来证明),面对此类问题,作者提出运用空间坐标变换原理,将雷达的倾斜状况进行整体修正,计算量小且修正效果明显。




-
为了验证该方法的正确性和有效性,本文中通过对实际风场的测风试验对该方法进行验证。在试验中,选用两台规格及参量相同的激光测风雷达在几个典型高度层上进行对比试验,试验中大气环境条件较好,能见度大于20km,气温0℃~10℃,湿度较低,试验主要内容如下:(1)1号雷达水平放置,2号雷达倾斜放置(横向倾斜7.2°),两台雷达均不添加修正算法,同时工作,输出数据并绘制曲线,证明倾斜后的垂直气流相差很大,而水平风速、风向相差不大; (2)为了达到实时对比,将前面得到的2号雷达的数据提取出来,添加修正算法,将修正后数据与1号雷达数据进行对比,证明修正算法起到了很好的修正作用,其中,2号雷达的放置情况为横向倾斜-7.2°。
首先,提取100m高度层的风速、风向数据,并绘制曲线进行对比说明,如图 9、图 10所示。
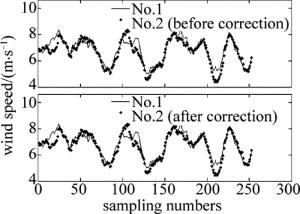
Figure 9. Comparison between wind speeds measured with No.1 and No.2 lidars on 100m level
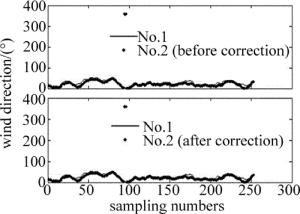
Figure 10. Comparison between wind directions measured with No.1 and No.2 lidars on 100m level
从图 9和图 10中可以看出,在修正前,由于倾斜放置而导致的风速、风向测量误差并不大。而由修正前后的曲线对比可以看出,修正后的风速、风向与修正前非常接近,相当于从理论上证明了雷达倾斜放置情况(10°以内)对于风速、风向的测量结果影响较小。
其次,提取50m,100m,150m及200m共4个典型高度层的垂直气流数据进行修正前与修正后的实验对比,并根据数据绘制出曲线,如图 11~图 14所示。
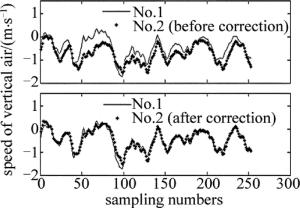
Figure 11. Comparison between vertical air flow measured with No.1 and No.2 lidars on 50m level
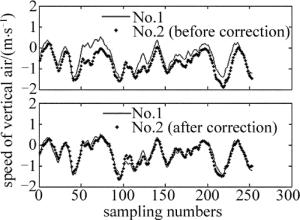
Figure 12. Comparison between vertical air flow measured with No.1 and No.2 lidars on 100m level
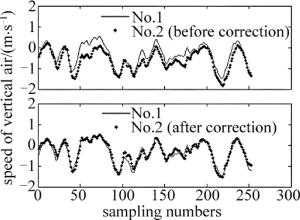
Figure 13. Comparison between vertical air flow measured with No.1 and No.2 lidars on 150m level
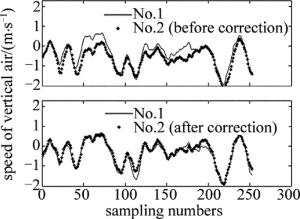
Figure 14. Compare between vertical air-flow measured with No.1 and No.2 lidars on 200m level
从图中可以看出,修正前由于倾斜放置导致雷达所测垂直气流数据间产生的误差较大,加入修正算法进行仿真后,数据曲线吻合良好,修正效果明显。






-
经过实验对比,首先得出在雷达处于倾斜放置状态下进行测量时,对于风速及风向的影响程度较小,而对垂直气流的影响程度很大。其次,在进行垂直气流的误差修正过程中可以看到,当雷达未加修正算法时,1号与2号雷达垂直气流曲线差异较大,而在加入修正算法后,两台雷达所显示的垂直气流曲线相当吻合,修正效果十分明显。从而证明了该算法对于垂直气流的修正补偿是有效可行的。值得注意的是,本算法的验证条件是基于倾斜角度在10°以内、风场相对稳定(均匀风和线性风场)的条件下进行修正的,而当风场波动较大或倾斜角度过大时,该算法的有效性还有待继续考证。
 DownLoad:
DownLoad: