 Map
Map




HTML
-
分布式光纤传感技术由于体积小、结构简单、灵敏度高、耐腐蚀耐高温、抗电磁干扰等优点,已成为目前光纤传感应用领域国内外的研究热点[1-3]。其中,相位敏感光时域反射计(phase sensitive optical time-domain reflectometer,ϕ-OTDR)作为一种新型分布式光纤传感技术,凭借结构简单、灵敏度高、实时性好、动态范围广、响应速度快等特点[4-5],在长距离周界安防、油气管线安全状况监测、大型结构健康监测等领域发挥出十分重要的作用[6-8]。
ϕ-OTDR系统利用背向瑞利散射光相位的变化来实现扰动信号的传感,通过分析光纤中背向散射光信号的强度和相位沿时间轴的分布曲线来实现传感光纤沿线的应变、振动等扰动信号的分布式监测。ϕ-OTDR的解调方法可以分为幅度解调和相位解调。幅度解调一方面在对微弱扰动信号解调方面存在缺陷,另一方面幅度解调过程并非线性,容易导致检测信号失真[9]。传感信号的扰动会直接造成光相位的变化,由于干涉效应而引起强度的变化,光相位对于光纤的扰动极其敏感,且与扰动信号的大小基本成线性的关系,所以对相位解调的研究显得尤为重要。
本文中首先介绍了ϕ-OTDR系统的传感原理,接着对国内外在ϕ-OTDR相位解调方法的研究进展进行了综述,最后重点介绍了ϕ-OTDR系统中常用的3种相位解调方法。
-
OTDR是应用最早、最广泛的分布式光纤传感器之一,传统的OTDR系统通过探测光脉冲在光纤中的后向瑞利散射光强度来进行光纤链路的损耗、反射、断点等事件的监测[10],高性能OTDR还可用于温度、应力以及长距离扰动信号的检测[11],但OTDR系统由于其自身的缺陷很难检测微弱的信号扰动。ϕ-OTDR是在OTDR传感技术的基础上发展起来的,其基本原理同OTDR系统类似,都是探测光脉冲产生的后向瑞利散射光来实现扰动信号的分布式测量,不同的是,ϕ-OTDR的光源是高相干性的,探测的是脉冲宽度范围内各个散射点产生的后向瑞利散射光相干涉叠加的结果,相较于OTDR系统具有更高的灵敏度。
光脉冲从光纤的始端注入,光场相位随传播距离线性变化,当传感光纤某区域发生扰动时,由于热光效应和弹光效应,该区域内光纤的折射率、密度及散射点之间的距离将发生变化,光场相位随传播距离不再线性变化,不同散射点发出的背向瑞利散射光发生干涉作用,从而引起该区域内后向瑞利散射光的相位发生变化,进而导致后向瑞利散射光功率将随之发生变化。通过检测入射光脉冲与接收到的信号之间的时延差并解调后向瑞利散射光的相位和功率变化,即可准确地定位扰动位置并获取扰动信息[12]。
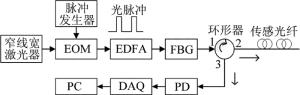
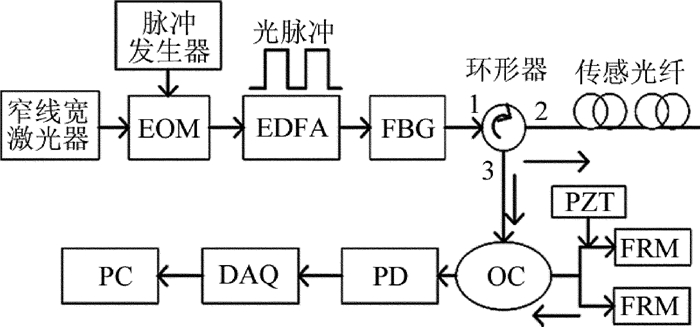
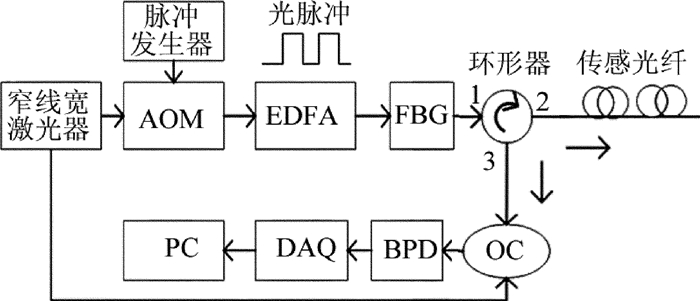
典型的ϕ-OTDR传感系统原理框图如图 1所示。线宽极窄、相干性极强的窄线宽激光器产生连续光,经电光调制器(electro-optic modulator,EOM)或声光调制器(acousto-optical modulator,AOM)调制成脉冲光,经掺铒光纤放大器(erbium doped fiber amplifier,EDFA)放大,再经过光纤布喇格光栅(fiber Bragg grating,FBG)滤波器滤除放大自发辐射(amplifier spontaneous emission,ASE)噪声后,由环形器注入传感光纤。产生的后向瑞利散射光由光电探测器(photo detector,PD)进行光电转换后, 经数据采集卡(data acquisition card,DAQ)采集,最后将采集得到的数据送入计算机(personal computer,PC)进行解调处理并显示。
-
在对ϕ-OTDR的前期研究中, 人们更多地侧重于传感信号强度的解调、传感距离的提升和信噪比的提高等方面的内容,很少关注传感信号的相位信息,从而无法对扰动信号进行定量测量。直到2011年,PAN等人利用相干探测系统通过对相干信号进行数字域傅里叶积分的方法,实现了对200Hz振动信号的幅度和相位信息的同时解调, 并验证了相位解调相较于传统的幅度解调的优越性[13]。2012年,LIANG等人针对激光器的相位噪声和探测器的加性噪声引起的相位波动问题,提出了一种基于数字相干检测和维纳滤波技术的ϕ-OTDR传感系统,提高了相位解调的精度[14]。随后在2013年, MASOUDI课题组通过基于3×3耦合器的马赫-曾德尔(Mach-Zehnder interferometer,MZI)干涉结构和微分积分交叉相乘解调法实现了50Hz~500Hz范围内的振动信号的定量测量[15]。2014年,ALEKSEEV等人简化了系统,提出利用相位调制双脉冲的方法来代替3×3耦合器进行相位解调,使系统的信噪比和测量稳定性得到了进一步提高[16]。随后在2015年,WANG等人将3×3耦合器的迈克尔逊干涉仪(Michelson interferometer,MI)型结构和极弱反射率光纤布喇格光栅(ultra-weak fiber Bragg gratings,UW-FBG)引入到ϕ-OTDR系统中,在声学振动和水下振动方面取得了突破[17-18]。2015年,LI课题组和WANG课题组相继提出了一种基于相位生成载波(phase generated carrier,PGC)调制技术的ϕ-OTDR传感系统,为相位解调领域带来了新思路[19-20]。2016年,RAO课题组提出了一种基于90°光学混频器的正交(in-phase/quadrature,IQ)解调方案,降低了数据处理的计算量并且提高了系统的稳定性和灵敏度[21];同年,MARTINS在IQ探测模型的基础上对探测光进行相移键控(phase shift keying,PSK)编码,在500m的传感光纤上实现了2.5cm的空间分辨率和500Hz应变信号的测量[22]。近几年, 随着人们对ϕ-OTDR传感技术相位解调领域的关注和研究,相继出现了许多新方法,如HE课题组将时间选通数字光频域反射计(time gated digital optical frequency-domain reflectometer,TGD-OFDR)与ϕ-OTDR系统相结合并利用Hilbert变换来对相位进行解调,将传感距离和空间分辨率分别提高到40km和3.5m[23];YANG等人通过加入辅助弱反射点减小了系统的相位噪声,同时利用基于相位信号统计分析的振动定位方法消除了信号衰落噪声进一步提高了系统的传感性能[24];ZHANG课题组针对解调过程中的相位卷绕问题提出一种利用统计计算的方法来进行信号解调,提高了系统对动态应变的响应范围[25];ZHU等人提出使用激光扫频和相位解卷绕结合的方法来进行相位解调,利用UWFBG来改善散射光信号强度弱、不稳定的问题,实现了应变扰动信息的高精度测量[26]。国内外针对ϕ-OTDR相位解调方法的研究进展见表 1。
时间/年 作者(课题组) 方案 测量信号主要性能指标 特点 2011 PAN[13] 相干检测与数字域傅里叶积分结合 频率200Hz,幅度5rad,空间分辨率5m,传感距离3.5km 高信噪比,高灵敏度,幅度和相位同时定量测量 2012 LIANG[14] 数字相干检测与维纳滤波结合 频率200Hz,峰峰值25V,空间分辨率5m,传感距离3.5km 降低了相位噪声和加性噪声,提高了相位解调精度 2013 MASOUDI[15] 基于3×3耦合器的MZI型结构和微分积分交叉相乘法结合 频率50Hz~500Hz,空间分辨率2m,传感距离1km,最小可探测应变80nε,应变分辨率20nε,信噪比1dB 解决了信号衰落问题,实现了多个扰动点的分布式动态测量 2015 ALEKSEEV[16] 相位调制双脉冲和相位分集接收技术结合 频率230Hz,灵敏度0.01rad,空间分辨率10m,传感距离2km 简化了系统,提高了测量的稳定性和系统的信噪比 2015 WANG[17-18] 基于3×3耦合器的MI型结构和微分积分交叉相乘法结合 空间分辨率10m,传感距离200m,频率200Hz,幅度1V~2V 实现了声学领域振动的幅度、相位、频率和扰动位置的测量 在以上的基础上利用UWFBG进行优化 最小可监测声压0.122Pa,频率450Hz~600Hz,声学相位灵敏度-158dB,空间分辨率5m,传感距离1km 将ϕ-OTDR引入到水下振动领域,实现了相关振动参量的测量 2015 LI[19] MI型干涉结构和PGC解调法结合 传感距离10km,频率120kHz,幅度2V,空间分辨率6m,信噪比30.45dB 降低了偏振和相位衰落,动态范围大,灵敏度高且相对稳定 2015 WANG[20] 空间分辨率10m,声学相位灵敏度-151dB,频率600Hz(500mV, 200mV),最小可监测声压6Pa,信噪比40dB 2015 TU[25] 统计计算方法 频率8Hz,应变200nε,传感距离30km,空间分辨率10m,最大可检测应变峰峰值为37.5rad,信噪比6dB 解决了相位卷绕问题,提高了解调的准确性和应变测量范围 2015 ZHU[26] 频率扫描技术、UWFBG和相位解卷绕技术结合 空间分辨率2m,传感距离5km,应变的最大测量误差6.2nε,应变灵敏度为42.6nε/rad,频率5Hz(15V),10Hz(10V) 改善了不稳定的散射信号,提高了信噪比和探测范围 2016 RAO[21] 利用90°光学混频器实现IQ解调 空间分辨率10m,传感距离12.65km,频率400 Hz ~600Hz,幅值2V,信噪比34.1dB 减少了数据处理,降低了对设备的要求,提高了系统的信噪比和稳定性 2016 MARTINS[22] PSK编码与IQ解调结合 空间分辨率2.5cm,传感距离500m,频率500Hz 把空间分辨率提高到厘米量级 2016 FAN[23] TGD-OFD与Hiblet变换结合 空间分辨率3.5m,传感距离40km,频率200Hz 提高了传感距离,实现了无盲区分布式传感 2016 YANG[24] 加入弱反射辅助参考点补偿相位噪声与统计分析方法相结合 空间分辨率10m,传感距离30km,频率100Hz~1000Hz,应变300nε 减少了相位噪声,实现了长距离、高灵敏度传感
-
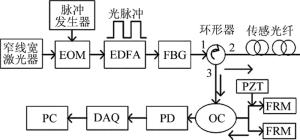
PGC解调法是通过引入非平衡的MI型干涉仪和相位生成载波调制解调法来实现的,其基本原理框图如图 2所示。该系统主要由传感信号产生部分、PGC调制部分、传感信号检测采集部分、计算机处理显示部分组成。携带扰动信息的后向瑞利散射光经光耦合器(optical coupler,OC)进入到由两个法拉第旋转镜(Faraday rotation mirrors,FRM)组成的非平衡MI型干涉仪进行PGC调制后,产生的干涉信号由PD转换成电信号后经DAQ采集传入PC进行解调处理和显示。
经过MI干涉仪和PGC调制经PD检测后的干涉信号可以表示为[27]:
式中,A为输入光的强度,与光源强度有关;B=κA为干涉光的强度(干涉条纹可见度κ≤1),与光源强度和干涉可见度有关;Ccos(ω0t)为压电陶瓷(piezoelectric ceramics,PZT)产生的PGC调制信号,其中C为调制深度,ω0为调制频率; $ \mathit{\Phi} \left( t \right) = D{\rm{cos}}({\omega _{\rm{s}}}t) + {\phi _{\rm{i}}}(t)$为包含扰动信息的待测信号,ωs为待测信号的频率,D为待测信号的幅值,$ {\phi _{\rm{i}}}$ (t)为环境干扰引起的扰动相位。
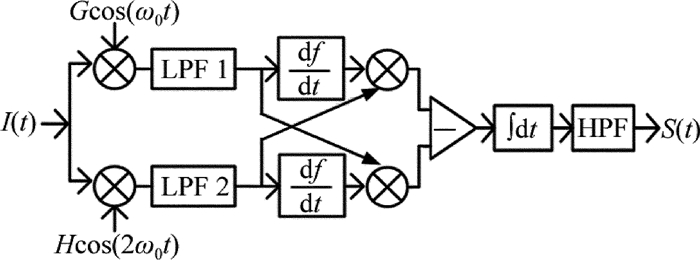
将PD检测得到的干涉信号利用贝塞尔函数展开后经DAQ采集后送入PC进行解调,基于PGC解调法的解调流程如图 3所示。将利用贝塞尔函数展开后的干涉信号分别同载波的单倍频Gcos(ω0t)和二倍频Hcos(2ω0t)相乘混频后通过低通滤波器(low pass filter,LPF),得到一对相互正交的正弦项和余弦项,接着依次再经过微分、交叉相乘、相减、积分就可以将含有扰动信息的信号提取出来,最后通过高通滤波器(high pass filter,HPF)滤除干扰相位得到的解调信号为[28]:
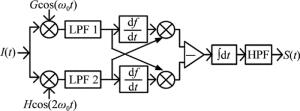
式中,B为干涉光强,G, H分别为用于混频的载波的单倍频和二倍频信号的幅值,J1(C)和J2(C)分别为调制深度C的1阶和2阶贝塞尔函数值。
PGC解调法具有动态范围大、灵敏度高、线性度好的优点,有利于消除相位漂移引起的干涉输出不稳性[29-30],但由(2)式可以看出, 解调出的信号容易受到光源功率和调制器件的稳定性的影响,从而导致解调信号失真。
-
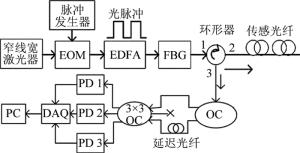
基于3×3 OC的解调法是通过引入两臂之间存在120°相位差的3×3 OC并结合干涉结构来实现相位解调的。按照干涉结构的不同可以分为基于3×3 OC的MI型ϕ-OTDR系统和基于3×3耦合器的MZI型ϕ-OTDR系统,其中MI型ϕ-OTDR系统的结构与图 2类似,基于3×3耦合器的MZI型ϕ-OTDR传感系统原理框图如图 4所示。其解调部分主要由1个非平衡的MZI型干涉仪、1个3×3 OC和3个PD组成。携带扰动信息的后向瑞利散射光首先经耦合器进入到非平衡MZI干涉仪中生成干涉信号,接着干涉信号进入到3×3 OC经PD转换后产生3路相位差为120°的电信号,最后3路信号经DAQ采集后送入PC进行解调处理和显示。
3×3 OC产生的3路相位差为120°的信号经PD检测后可以表示为[31]:
式中,A,B都是常数, 与(1)式中的含义相同; $ {\phi _{\rm{r}}}(t) = {\phi _{\rm{s}}} + {\phi _{\rm{n}}} + {\phi _0}$,其中$ {\phi _{\rm{s}}}$为包含扰动信息的待解调相位,$ {\phi _{\rm{n}}}$为噪声引起的干扰相位,${\phi _0} $为信号初始相位。
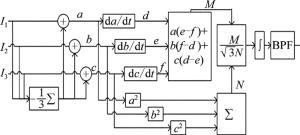
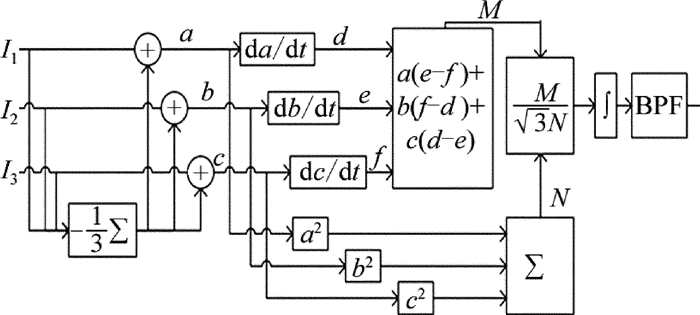
将以上信号经过DAQ采集后送入PC进行解调,基于3×3 OC的解调法的解调流程如图 5所示。首先将3路信号相加乘以-1/3,再与每一路相加去掉直流项,接着将去掉直流的3路信号a,b,c分别与另外两路微分后的结果d,e,f的差值相乘并相加,之后将得到的结果M与3路去直流信号平方和N的$\sqrt 3 $倍相除消去无关项,最后将所得信号积分并通过带通滤波器(band-pass filter,BPF), 就可以得到待解调的信号[32]。
基于3×3 OC的解调法具有动态范围大、响应带宽高、结构简单、不需要调制器件等优点[33-34]。但其需要3个PD配合解调,使得系统花费升高;信号经过干涉结构后强度被削弱,进而降低了系统的信噪比;耦合器容易收到外界环境影响从而使解调结果准确性下降[35]。
-
以上两种解调方法都是通过引入具有延时结构的干涉仪进行自外差检测并利用交叉相乘积分法实现相位解调的,而数字相干IQ解调法是一种利用本地光与瑞利散射光本地外差产生干涉信号后进行正交解调的方法,其基本结构如图 6所示。经过AOM调制的光脉冲,其激发的移频Δω的后向瑞利散射光与由激光器分光后的本地光在耦合器中进行本地外差拍频,产生的拍频信号进入平衡光电检测器(balanced photodetector,BPD)中进行光电转换后, 由DAQ采集并送入PC进行解调处理和显示。

BPD检测得到的拍频信号可以表示为[36]:
式中,ER和El分别为瑞利散射光和本地光的振幅,Δω为AOM调制光脉冲产生的移频,$ \phi \left( t \right) = {\phi _{\rm{l}}}(t) - {\phi _{\rm{R}}}(t)$为本地光与瑞利散射光的相位差。
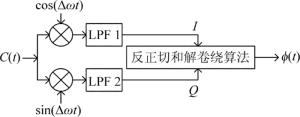
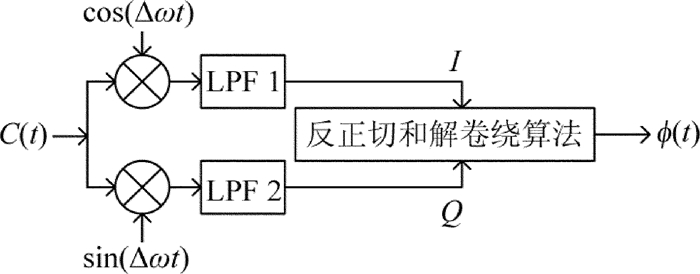
将以上信号经DAQ采集后送入PC进行解调,IQ解调法的解调流程如图 7所示。将BPD的输出信号分别与两个频率为Δω的正余弦纯载频信号相乘,然后通过LPF滤除高频信号,得到的I路和Q路信号再利用反正切算法和解卷绕算法得到瑞利散射光最终的相位[37],即:
数字相干IQ解调法结构简单,不需要任何调制器件,利用本地光增强了信号使系统信噪比和灵敏度得到了提高[38-39]。但解调结果容易受到激光器频率漂移引起的相位噪声和本地光与瑞利散射光偏振态不稳定的影响,从而使解调准确性下降。
-
为了更清楚的比较ϕ-OTDR不同相位解调方法之间的差异,将不同相位解调方法的优缺点及主要性能指标绘制成表格,如表 2所示。
相位解调方法 优点 缺点 主要性能指标 PGC解调法[19-20] 动态范围大、灵敏度高、线性度好、信噪比高 易受到光源功率和调制器件的稳定性的影响 传感距离10km,空间分辨率6m,频率120Hz(2V),信噪比30.45dB 水下声振动:传感距离500m,空间分辨率10m,频率600Hz(500mV, 200mV),信噪比40dB,灵敏度-151dB,声压范围6Pa~15Pa 基于3×3 OC的解调法[15, 18] 动态范围大、响应带宽高、无需调制器件 系统成本较高、信噪比较低、解调结果易受环境影响 传感距离1km,空间分辨率2m,频率50Hz~5000Hz,最小可探测应变80nε,应变分辨率20nε,信噪比1dB 水下声振动:传感距离1km,空间分辨率5m,声压范围0.122Pa~30Pa,灵敏度-158dB,频率450Hz~600Hz(1V),信噪比0.143dB 数字相干IQ解调法[21] 结构简单、信噪比和灵敏度较高 解调结果易受相位噪声和偏振噪声的影响 传感距离12.56km,空间分辨率10m,频率400Hz~600Hz(2V),信噪比34.1dB~42dB
3.1. PGC解调法
3.2. 基于3×3 OC的解调法

3.3. 数字相干IQ解调法
3.4. 不同相位解调方法的总结与对比
-
基于相位解调的ϕ-OTDR传感系统由于其在声音、振动等传感信号的解调优势,是未来分布式传感系统的一个重要方向。介绍了ϕ-OTDR传感系统中相位解调常用的3种方法,分析了3种方法各自的优势与不足,对基于ϕ-OTDR的传感系统中解调方法的选择以及新方法的研究具有重要意义。
 DownLoad:
DownLoad: