 Map
Map




HTML
-
利用地面3维激光扫描仪进行扫描作业时,若遇扫描范围过大或扫描视角被其它物体遮挡等情况,应增加测站来完成全部扫描。即在扫描之前将3个或3个以上的球标靶(白球)合理布设至被扫描物体周围,之后利用球标靶的球心坐标通过刚体变换公式实现坐标转换,将所有扫描数据统一至同一坐标系下,为后期数据处理提供完整的研究对象点云坐标数据。其中,球标靶球心坐标通过球面拟合得到,因此,球面拟合精度直接影响到球心坐标精度,进而对整个坐标转换精度及之后数据处理、数据分析、数据建模的精度产生极大影响。
传统最小二乘(least squares,LS)法[1]、总体最小二乘(total least squares,TLS)法[2-3]等球面拟合方法在拟合过程中,均将点云各点当做等独立精度观测值处理,由于受观测环境、系统误差等因素影响,地面3维激光扫描获取的空间3维坐标x, y, z这3个方向上均含有误差且各点点位精度均不相同,若采用上述方法对球面点云数据进行拟合,所得参量解并非球面参量的最或然值。作者在总体最小二乘法的基础上引入加权总体最小二乘(weighted total least squares,WTLS)模型[4-11],结合权函数中国科学院大地测量与地球物理研究所(Institute of Geodesy and Geophysics, IGG)Ⅲ方案[12-13],新的加权总体最小二乘点云球面拟合算法(weighted total least squares combined with IGGⅢ scheme,IGGⅢ-WTLS),其通过对系数矩阵及观测向量的权阵进行合理定义及设计,在参量迭代解算过程中根据IGGⅢ方案确定的点位精度,自适应地对拟合权阵进行修正,提高拟合精度。
-
加权总体最小二乘球面拟合的变量误差(error-in-variables, EIV)模型为:
式中,Y为含偶然误差eY的n×1维观测向量,A为含偶然误差EA的n×4维系数矩阵,X为待求球面参量:
式中,eY舍去了$ \left( {{v_{{x_i}}}^2, {v_{{y_i}}}^2, {v_{{z_i}}}^2} \right)(i = 1, 2, \ldots , n)$等极小的二次项。
随机误差eY与EA的统计性质如下:
(3) 式服从的正态分布。式中,vec()为矩阵拉直变换,σ02为未知方差分量; QY, QA为eY与eA的对称、非奇异协因数阵,且有:
式中,PY为观测值权阵,PA为系数矩阵A的权阵,PX和P0分别为系数矩阵A的行向量权阵及列向量矩阵,“ $ \otimes $ ”为Kronecker积。
加权总体最小二乘的参量估计准则为:
-
根据加权总体最小二乘球面拟合EIV模型,令:
由于x, y, z独立等精度,则有:
式中,${\sigma _x}, {\sigma _y}, {\sigma _z}, {\sigma _u}, {\sigma _w} $分别为$ x, y, z, u, w$的方差。
由协因素传播定律得:
令单位权方差σ02=1,则有:
式中,Qu, Qw分别为u, w的协方差阵。
由(10)式可得:
式中,Pw为EIV模型的观测向量权阵, 即PY;Pu为系数矩阵的行向量矩阵, 即PX。
根据(11)式定义系数矩阵A的列向量权阵P0、行向量矩阵初始权阵PX、观测向量Y的初始权阵PY如下:
式中,$ {\mathit{\boldsymbol{P}}_{{\mathit{\boldsymbol{Y}}_i}}} = {\mathit{\boldsymbol{P}}_{{\mathit{\boldsymbol{X}}_i}}}/\left( {{x_i}^2 + {y_i}^2 + {z_i}^2} \right)(i = 1, 2, \ldots , n)$。
-
由于点云数据受环境影响大,粗差点较多,顾及IGGⅢ方案在测绘领域较好的适用性[14-15],选取IGGⅢ方案对点云参量迭代解算过程中的拟合权阵(A的行向量矩阵的初始权阵PX、观测向量Y的初始权阵PY,且有$ \mathit{\boldsymbol{\bar P}} = \mathit{\boldsymbol{P\omega }}$ [13],P为PX, PY总称, $ {\mathit{\boldsymbol{\bar P}}}$为修正后权值,ω为权因子)进行修正,其权因子计算公式为:
式中,Vi为残差,σ为中误差,k0和k1为调节权因子的阈值。根据中误差分布概率理论[13],一般有:k0=1.0~1.5,k1=2.5~3.0。本文中令Vi=di,di为点M(xi, yi, zi)到拟合模型表面的距离(见(14)式),根据IGG Ⅲ方案在测绘领域的适用性研究[12-13, 16],令k0=1.5, k1=2.5,即认为当观测值Vi < 1.5σ时,则可认为该点不含误差,其权因子ωi不变; 当Vi>2.5σ时,则可认为该观测值为粗差,予以剔除。
式中,$ a, b, c, r$为球面参量。
-
在加权总体最小二乘模型的基础上,通过合理定义权阵,结合1.3节中所定义的权函数IGGⅢ方案提出了新的加权总体最小二乘点云球面拟合算法(IGGⅢ-WTLS法),根据(5)式所示的参量估计准则,定义算法的具体思路及模型解算步骤如下。
(1) 利用LS法求得拟合模型参量估值,之后根据1.2节中所述方法定义系数矩阵A的列向量权阵P0及其行向量初始权阵PX(1)、观测向量初始权阵PY(1)(上标加括号表示迭代)。
(2) 求取参量$ \mathit{\boldsymbol{X}} = {\left[ {a, b, c, {r^2} - {a^2} - {b^2} - {c^2}} \right]^{\rm{T}}}$的迭代初始值:
式中,Q0为P0的广义逆。
(3) 计算$ {{\hat \mu }^{(i)}}, {{\hat \lambda }^{(i)}}$及$ {{\hat v}^{(i)}}$:
(4) 计算$ {{\hat X}^{\left( {i + 1} \right)}}$:
(5) 利用(14)式各点到拟合模型表面的距离。
(6) 根据(13)式计算权因子ω(i),令$ {\mathit{\boldsymbol{P}}^{(i + 1)}} = {\mathit{\boldsymbol{P}}^{\left( i \right)}}{\omega ^{(i)}}$,之后根据权阵定义准则重新设定权阵$ {\mathit{\boldsymbol{P}}_\mathit{\boldsymbol{X}}}^{(i + 1)}, {\mathit{\boldsymbol{P}}_\mathit{\boldsymbol{Y}}}^{(i + 1)}$。
(7) 重复步骤(3)~步骤(6),直到$\parallel {{\hat X}^{(i + 1)}} - {{\hat X}^{(i)}}\parallel < {\delta _0}({\delta _0}$为给定阈值,本文中取为10-6)。
(8) 计算单位权重中误差${{\hat \sigma }_0} $及球面拟合精度${{\hat \sigma }_{\rm{s}}} $,进行精度评定:
1.1. 加权总体最小二乘基本原理
1.2. 权阵定义
1.3. 权函数选取
1.4. 参量解算
-
为了对本文中所构建球面拟合方法的适用性及优越性进行验证,分别利用其对模拟球面数据、实际扫描球面数据进行拟合。
-
对于球面方程:
其坐标球心为(10, 10, 1),半径为$ 10\sqrt 2 $ m,利用MATLAB在x, y∈[0, 20]范围内随机生成500个点,并将第12, 第15, 第53, 第67和第465号点替换成粗差点,如图 1所示。
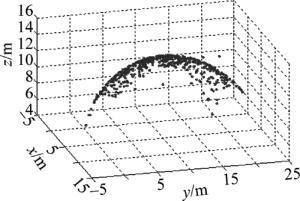
Figure 1. Simulation of sphere point clouds
分别利用LS法、TLS法、IGGⅢ-WTLS法对不含粗差、加入随机粗差的两组球面点云数据进行拟合,结果如表 1和表 2所示。
methods Δ|a|/m Δ|b|/m Δ|c|/m Δ|r|/m $ {{\hat \sigma }_0}$ /m ${{\hat \sigma }_{\rm{s}}} $ /m LS method 0.0002 0 0.0016 0.0014 0.08004 0.00282 TLS method 0.0002 0 0.0015 0.0014 0.08004 0.00282 IGGⅢ-WTLS method 0.0005 0 0 0.0008 0.00112 0.00285 Table 1. Fitting precision without gross errors
methods Δ|a|/m Δ|b|/m Δ|c|/m Δ|r|/m $ {{\hat \sigma }_0}$ /m ${{\hat \sigma }_{\rm{s}}} $ /m LS method 0.0670 0.0285 0.1754 0.2409 5.21910 0.20223 TLS method 3.5674 0.9320 11.1511 7.7432 34.33430 2.39240 IGGⅢ-WTLS method 0.0026 0.0008 0.0035 0.0717 0.00530 0.20114 Table 2. Fitting precision with gross errors
表 1中,由于数据取位的原因,各方法所得参量与实际参量之间存在一定偏差,但各参量值非常接近实际参量值,单位拟合权重中误差与球面拟合精度较小,各方法拟合效果均比较好。其中,LS法忽视了系数矩阵误差,TLS法虽同时考虑了观测向量与系数矩阵误差,但未考虑各观测值的点位精度,以上两种算法的单位权重中误差$ {{\hat \sigma }_0}$均大于IGGⅢ-WTLS法,拟合效果相对较差。
由表 2可得,LS法受粗差影响,拟合效果明显下降;TLS法过多考虑到系数矩阵不含误差部分,拟合效果最差;IGGⅢ-WTLS法考虑了系数矩阵误差与观测向量误差的同时,根据点与拟合球面的相关关系,成功进行了粗差探测与合理权值替换,较好抵抗了粗差干扰,各项拟合指标均优于其它算法,拟合效果最好。
-
利用徕卡Scanstation C10地面3维激光扫描仪对真实场景进行扫描,获取实际球面点云数据(半径为0.0725m),如图 2所示。分别利用LS法、TLS法、IGGⅢ-WTLS法对两组球面点云数据进行拟合,拟合结果如表 3所示(表中,$ \hat a, \hat b, \hat c, \hat r$为球面参量$ a, b, c, r$的最或然值)。

Figure 2. Real scanning datas of sphere point clouds
samples methods $ {\hat a}$ /m ${\hat b} $ /m $ {\hat c}$ /m $ {\hat r}$ /m Δ|r|/m $ {{\hat \sigma }_0}$ /m $ {{\hat \sigma }_{\rm{s}}}$ /m spherical Ⅰ LS method 0.0099 5.8443 -1.6388 0.0735 0.0010 7.7080×10-5 5.0800×10-3 TLS method 0.0099 5.8443 -1.6388 0.0735 0.0010 7.7080×10-5 5.0800×10-3 IGGⅢ-WTLS method 0.0083 5.8454 -1.6357 0.0724 0.0001 1.0440×10-6 9.4506×10-4 spherical Ⅱ LS method 1.3982 3.7690 -1.6291 0.0736 0.0011 8.2813×10-4 5.4274×10-3 TLS method 1.3982 3.7691 -1.6291 0.0736 0.0011 8.2813×10-4 5.4278×10-3 IGGⅢ-WTLS method 1.3963 3.7694 -1.6247 0.0717 0.0008 1.0084×10-5 7.0619×10-4 Table 3. Real spherical parameters and fitting precision
由于实验中所用球面点云数据经过粗差剔除等处理,因此所含误差较少,由表 3可知,各算法所求参量较为接近,单位权重中误差、球面拟合精度较小,拟合效果较为理想。其中,由于数据纯度较高,因此LS法与TLS法计算结果基本一致,仅球2参量b相差了0.0001m;LS法、TLS法、IGGⅢ-WTLS法所得球标靶1半径r相对误差分别为1.38%, 1.38%, 0.14%,LS法、TLS法、IGGⅢ-WTLS法所得球标靶2半径r相对误差分别为1.52%, 1.52%, 1.10%,同时IGGⅢ-WTLS法两项精度评定指标均小于LS法及TLS法,因此,IGGⅢ-WTLS法拟合效果优于其它两种算法,所得参量解更可靠。
2.1. 模拟数据
2.2. 实际扫描数据

-
(1) 由于地面3维激光扫描点云各点精度不等,依据广义极大似然估计各权函数特点及其适用范围,选用IGGⅢ方案对加权总体最小二乘球面拟合算法进行改进,提出了IGGⅢ-WTLS点云拟合算法。该算法同时考虑了拟合模型系数矩阵误差与观测向量误差,并可在模型参量解算过程中,通过计算点与模型的相关关系,自适应地调整各点拟合权值,优化拟合权阵。模拟球面数据及实际扫描球面数据的拟合实例表明,该算法具备较好的可行性及优越性,利用该算法拟合得到的球心坐标可靠性更高。
(2) 基于IGGⅢ方案的加权总体最小二乘点云拟合算法较最小二乘法、总体最小二乘法更为稳健,但在解算过程中,当数据量过大时,由于权值的自适应修正过程较为复杂,迭代计算较为繁琐,解算所需时间较多,如何提高解算效率值得进一步深入研究。
 DownLoad:
DownLoad: