 网站地图
网站地图

 下载:
下载:
-
最近10年间,不管是民用领域还是军用领域,无人机(unmanned aerial vehicle,UAV)[1]都发挥着越来越重要的作用,无人机系统呈现出小型化、轻量化及智能化的发展趋势[2]。无人机具有许多优势,被认为是一种强大的力量倍增器,与飞行员所能做到的相比,执行同样的任务其具有风险更低、成本更低的优势[3]。而无人机精确回收技术一直是其发展的困难所在,回收技术也是无人机系统设计的重点和难点,良好的回收方案对于提高系统使用性能、降低无人机使用成本具有重要意义[4]。现有回收着陆通常包括:滑跑回收、迫降回收、伞降回收、撞网回收、绳钩、风向袋回收等多种方式[5],如何高效和精准地进行无人机回收一直令人棘手。滑跑回收通过无人机自身携带的起落架在跑道上滑行,使无人机减速至停止,操控方式与传统有人机相似,但该方式需要一定长度的平整跑道,这在野外机动环境中难以满足;迫降回收是指无人机关闭发动机后在平坦、开阔的松软空地或密实地面区域上方,通过飞机机腹擦地滑行减速至停止,该方式对地面有一定要求,且容易对无人机机体造成损伤,有一定风险性,通常只在紧急情况时采用;伞降回收是无人机通过在回收区上方时,发动机停车并打开自带的降落伞减速,着陆至指定区域内的回收方式,该回收方式容易受环境和气象条件的影响,导致落点的偏差较大;撞网回收是一个非常简单的解决方案,该技术是有一个垂直安装网供无人机快速着陆,简单而可靠,不涉及复杂组件, 但它的缺点是复杂并且劳动密集,需要在两者之间建立和取消行动。海湾战争期间,美国海军的无人机在被捕获时经常被损坏[6];绳钩回收是利用一根或几根悬挂在吊杆上的绳索捕获无人机上(如机翼位置)安装的小钩的回收方式,该装置与撞网回收类似,但对机翼或机身强度要求较高,操控难度较大,一般舰载使用[7];风向袋回收装置具有低恢复时间和低复杂度,但它不能装置在前方用于推进,因为这存在损坏无人机和风向袋的风险[8]。
根据上述几种无人机回收方式的比较分析可以发现:对于野外复杂环境条件下的无人机回收,滑跑方式需要滑行跑道,伞降方式在回收过程中降落伞不受控制,受外界环境条件(如风力)影响,在野外环境下适应性差;撞网、绳钩、迫降、风向袋等回收方式适应野外环境性较好,但需要无人机在着陆段有较高的引导精度,同时容易损坏无人机。因此,如何提高无人机着陆阶段的引导控制精度,对无人机的精确、可靠回收至关重要。由于激光制导具有制导精度高、抗干扰能力强和可与其它寻的器复合使用等优点,因而受到高度重视,应用得越来越广泛[9]。
本文中提出的激光末端引导无人机精确回收技术基于激光末端引导原理,是目前激光制导弹药武器系统中,相对于红外、电视、无线电等制导方式中引导精度最高的[10],将该方案应用到无人机的回收系统中,可以显著提高无人机在复杂环境下的回收精度。
-
激光末端引导无人机精确回收方案,基于现有无人机系统构架(无人机机体、飞行管理与控制系统、数据链系统、电源系统、地面控制系统等),最大限度地利用已有资源,系统简单,效费比高。
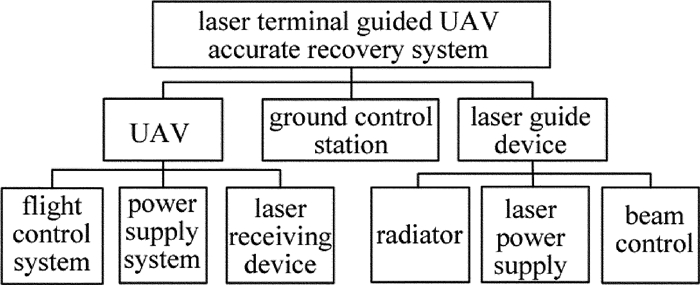
在现有无人机系统组成状态下,增加地面激光引导装置和机上激光接收装置,实现着陆段激光精确引导。其中激光引导装置设置在着陆点,用于发射编码激光光束,在空间形成引导无人机着陆引导光场;激光接收装置安装在无人机头部位置,接收地面引导装置发出的激光信号,处理得到无人机与引导基准航线的飞行偏差;飞控系统控制无人机飞行,实现精确引导回收。系统组成框图如图 1所示。

Figure 1. Composition diagram of an accurate laser terminal guided UAV recycling system
激光末端引导装置用于发射编码激光光束,在空间形成引导无人机着陆的辐射光场。激光引导装置采用脉冲固体激光器作为光源,以提升激光作用距离,激光引导装置由激光辐射器、激光电源、激光光束控制系统、控制与接口电路等组成。激光接收装置安装在无人机头部位置,激光接收光轴与无人机机身轴线一致,激光接收装置测量的偏差信号就是无人机在航向和俯仰两个方向上飞行角偏差。
激光接收装置由接收光学系统、光电探测器、放大电路、信号处理电路、电源电路和壳体等组成。激光引导装置发出的激光信号经整流罩,由接收光学系统会聚到光电探测器上。光电探测器将激光信号转换成电信号,放大电路将电信号放大后,送信号处理电路,进行编码识别和解算处理,输出目标(即着陆点)相对光轴(即飞机机身轴线)角偏差,送飞控系统处理。
-
激光末端引导无人机精确回收技术方案基于激光半主动制导工作原理,按照本技术方案,采用激光将无人机引导至着陆点的过程,类似于用激光将激光制导导弹引导至攻击目标实施精确打击的过程,因此采用激光末端引导,能显著地提高无人机回收的成功率,实现无人机精确回收。
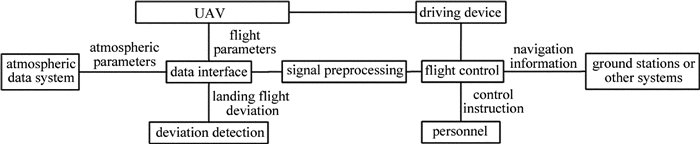
通常,无人机完成航线任务返航着陆前,无人机导航系统接收来自地面控制站或卫星等其它系统提供的导航信息,控制无人机按照预定的航路飞行。无人机飞行数据如位置、姿态、高度、速度、角速度等,以及大气数据系统采集的大气数据(如风速等),通过数据接口采集接收,经数据滤波等预处理,反馈至飞控系统(见图 2);此时操作人员应时刻关注监视器的状况,根据无人机的实时位置、速度等,操控修正无人机飞行路线和姿态(“人在回路”工作状态),使无人机对准着陆场的引导标志或地面摄像机瞄准线等,操控飞机逐渐飞抵着陆点[11]。在上述过程中,操作人员的操控水平起到关键作用,一旦操作失误,就会导致回收失败。

Figure 2. Diagram of data interface of an UAV landing guidance system
采用激光末端引导技术回收时,无人机一旦被引导进入引导窗口,机上激光接收装置将会接收到激光引导装置发射的引导激光信号,经解码、处理、解算,得到无人机在侧向和垂向方向的偏差角信号,由于激光接收装置光轴与无人机机身轴线一致,因此,激光接收装置探测到的两个方向的角偏差信号直接反映了无人机的飞行偏差,将两个方向的偏差信号送飞控系统进行信号处理,就可以直接引导飞机逐渐飞向着陆点(“自主工作”状态),实现无人机精准回收。在此过程中,如有异常情况发生,方案设计仍保留了地面操控人员进行干预的人工通道[12]。
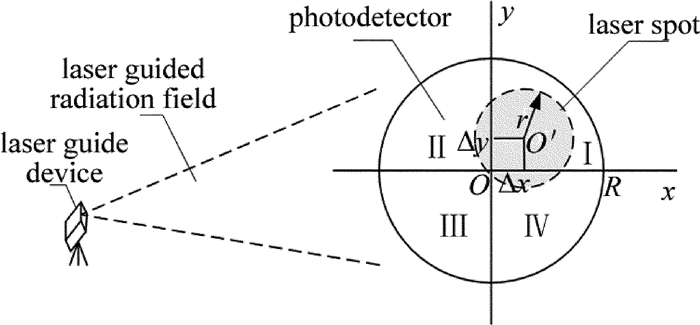
采用四象限光电器件的探测方案(见图 3),采用宽带多通道接收器、数字信号处理器实现激光信号的解码与处理。测角方法如下:激光信号经接收光学系统,成像光斑落在四象限探测器的光敏面上,每个象限分别产生光电压信号V1, V2, V3, V4,分别对上述信号进行和差运算,即可得到在x和y两个垂直方向上的偏差信号,工程应用中通常对偏差信号进行归一化处理,得到Δx, Δy[13]。根据Δx, Δy得到飞行角偏差,控制无人机进行航迹修正。
$ \Delta x = \frac{{\left( {{V_1} + {V_4}} \right) - \left( {{V_2} + {V_3}} \right)}}{{{V_1} + {V_2} + {V_3} + {V_4}}} $
(1) $ \Delta y = \frac{{\left( {{V_1} + {V_2}} \right) - \left( {{V_3} + {V_4}} \right)}}{{{V_1} + {V_2} + {V_3} + {V_4}}} $
(2) 
Figure 3. Angle measurement by means of a four-quadrant photoelectric detector
式中,V1为第一象限的光电信号幅度;V2为第二象限的光电信号幅度;V3为第三象限的光电信号幅度;V4为第四象限的光电信号幅度。回收过程中,无人机一直处于激光引导装置发射的大波束激光引导辐射场范围内,机上的激光接收装置探测到激光信号进行解码识别,确认是有效辐射信号后,通过激光接收装置测量得到无人机着陆段飞行航迹与基准航线的偏差,飞控系统修正飞行偏差,调整机身姿态,降低飞行速度,控制无人机向地面激光引导装置前的阻拦网飞去,最后撞入阻拦网,实现精确回收。激光引导装置发射的激光信号为编码信息,可以提高抗干扰性能[14-15]。
-
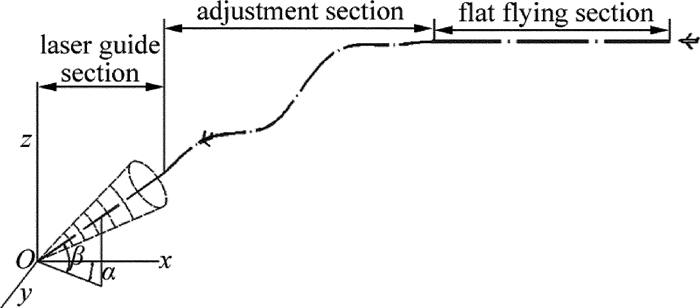
机上激光接收装置将接收到激光引导装置发出的激光信号,并解码捕获(调整段)。如果无人机不能捕获到激光信号,则需操控无人机盘旋后,再次进入。确保无人机可靠进入激光引导光场,并逐渐飞抵着陆点(激光引导段)。引导过程如图 4所示。
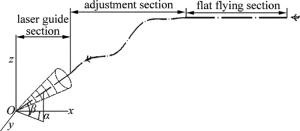
Figure 4. Diagram of UAV landing guide process
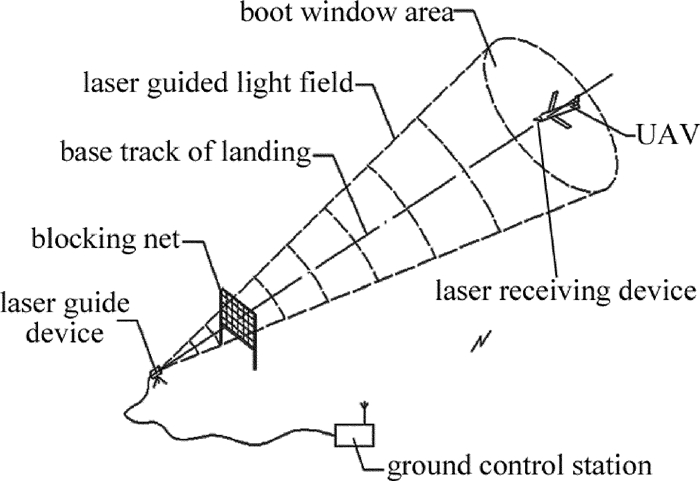
工作流程如下:(1)激光引导无人机着陆时,将激光引导装置设置在拦阻网后方,调整激光引导装置将激光发射光轴穿过拦阻网中心,并与设定的无人机着陆下滑线一致,形成着陆引导基准航线; (2)无人机着陆时,打开激光引导装置,发射编码激光信号,在空间形成引导光场分布;(3)无人机在地面站的引导控制下,降低飞行高度、降低速度、调整飞行姿态,沿着预定的着陆基准航线飞行,逐渐进入引导窗口;(4)安装在无人机头部的激光接收装置,接收到地面激光引导装置发出的激光信号,对该信号进行解码识别和处理,得到无人机相对于引导基准航线的飞行偏差角(侧向、垂向两个方向);(5)飞控系统根据激光接收装置探测的两个方向偏差信号,控制修正飞机与基准航线的飞行偏差,最终将无人机准确地引导至拦阻网上,实现精准回收[16-18](见图 5)。
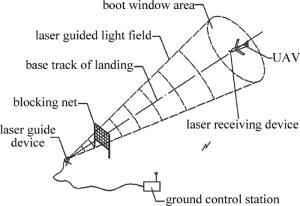
Figure 5. Scheme diagram for precise laser guided UAV recycling
-
无人机在平飞段和调整段采用扩展卡尔曼滤波算法,把多种传感器的数据进行深度融合,获取高精度的姿态、航向、速度和位置信息,根据现有技术水平,在满足一定的引导窗口直径及航向偏差角的条件下,可以将无人机引导使其进入着陆引导窗口,仿真的重点工作是如何保证激光引导光场辐射范围的动态控制,使其与无人机着陆引导段飞行航迹保持适配,确保在着陆过程中激光信号的可靠接收。
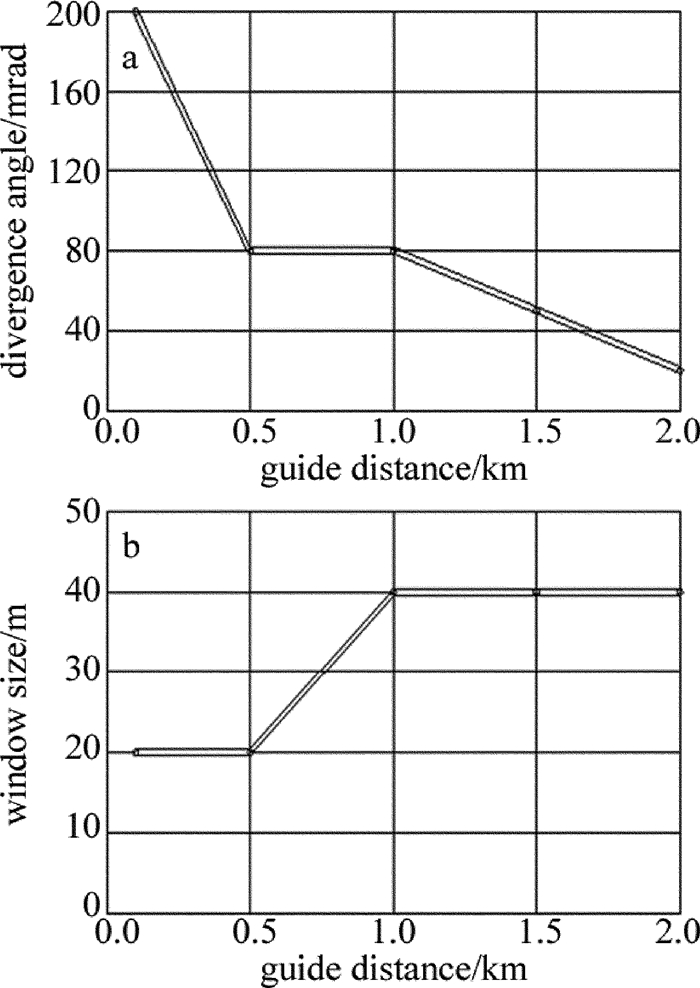
根据无人机捕获与控制要求,结合近场及远场的激光光场分布特性[19],在对应的引导距离段其辐射光场动态控制特性仿真结果如图 6所示。在距离着落点1km~2km的粗引导距离段,保持恒定40m的激光引导光场辐射场,可以使无人机快速进入激光辐射场调整偏航角度信息,提高回收的可靠性;中间距离段,激光辐射场与着落距离按线性关系变化,有利于粗引导转入精确引导阶段;在距离着落点500m以内的精确引导距离段,保持20m的激光引导光场辐射场按照现有激光末制导武器系统达到的制导精度,可以实现较高的无人机回收精度。

Figure 6. Relationship between divergence angle, window size and guidance distance
-
作者所提出的激光末端引导实现无人机精确回收的技术方案,相比现有的卫星、雷达、图像等引导方案,具有下列优势和特点:
(1) 引导精度高。激光末端引导无人机回收,其工作原理类似于激光制导系统工作原理。从目前激光制导武器系统的命中精度来看,通常圆概率误差(circular error probable, CEP)在几米以下,有些导弹已达零点几米的CEP命中精度,因此采用激光末端引导精度高,可以提高无人机精确引导回收要求。
(2) 系统组成简单、易于集成到现有的无人机系统。激光引导无人机精确回收,依托现有无人机系统架构进行设计,仅需增加地面激光引导装置、激光接收装置,并升级相关控制软件,即可实现激光末端精确引导,与现有无人机系统兼容性好。
(3) 自主工作、使用方便。激光末端引导装置采用三脚架架设,展开方便,便于寻找着陆场;激光接收装置探测的飞行偏差可直接参与无人机飞控处理,实现自主工作,避免了地面操控人员人工干预存在的时间延时,提高了控制的实时性,降低了对地面人员的操控要求。
(4) 抗干扰能力强。激光引导辐射光场采用近红外不可见光源,激光辐射能量仅包含在光束发散角范围内,不易被探测并受到敌方干扰。此外,激光引导装置发射的激光信号为编码信息,激光接收装置探测的激光信号,只有在编码匹配的情况下才能被识别和处理。
基于激光末端引导的无人机精确回收技术
UAV precise recycling technology based on laser terminal guidance
-
摘要: 为了提高野外复杂环境下无人机回收的回收精度及回收成功率,采用了基于激光末端引导体制的无人机精确回收方法,对激光末端引导精确回收无人机系统的工作原理及流程进行了理论分析和验证,取得了无人机引导距离段与激光引导光场辐射场以及无人机偏航角度信息与系统精确回收之间的数据关系。结果表明,在距离着落点1km~2km的粗引导距离段,保持恒定40m的激光引导光场辐射场,可以使无人机快速进入激光辐射场调整偏航角度信息,提高回收的可靠性;在中间距离段,激光辐射场与着落距离按线性关系变化,有利于粗引导转入精确引导阶段;在距离着落点500m以内的精确引导距离段,保持20m的激光引导光场辐射场,可以提高无人机系统的回收精度。将该方案应用到无人机的回收系统中,可以显著提高无人机在复杂环境下的回收精度。Abstract: In order to improve the recycling precision and recycling rate of unmanned aerial vehicles (UAV) in complex environment, a precise recycling method of UAV based on laser terminal guidance was adopted. The principle and process of precise UAV recycling by means of laser terminal guidance were analyzed and verified. The relationship between the guide distance of UAV and laser guidance light radiation field and the relationship between yaw angle information of UAV departure and system precise recycling were discussed. The results show that in the range of rough guide distance of 1km to 2km from the landing point, keeping a constant laser guided field of 40m, the UAV can quickly enter the laser radiation field, adjust yaw angle information and improve the reliability of recycling. In the range of middle distance, the relationship between laser radiation field and landing distance changes linearly, which is beneficial for transferring from the rough guidance to the precise guidance. In the range of precise guide distance within 500m and constant laser guided field of 20m, the system can improve the precision of recycling. The scheme is applied to UAV recycling system, which can significantly improve the recycling precision of UAV in complex environment.
-
Key words:
- laser technique /
- laser terminal guidance /
- unmanned aerial vehicle /
- precise recycling
-
Figure 1. Composition diagram of an accurate laser terminal guided UAV recycling system
-
[1] USA DEPARTMENT OF DEFENSE. Dictionary of military and associated terms[M]. Washington DC, USA:Create Space Independent Publishing Platform, 2010:3. [2] LIU J G, LI Z L, YAN Sh B, et al. Military UAV development review and exhibition: the vanguard of wing[C]//The 3th Chinese UAV Assembly Papers. Beijing: Aviation Industry Press, 2010: 47-49(in Chinese). [3] AUSTIN R. Unmanned aircraft systems:UAVS design, development ad deployment[M]. New York, USA:John Wiley & Sons Ltd., 2010:15. [4] YANG F Y. UAV parachute drop recovery technology development: The vanguard of wing[C]//The 3th Chinese UAV Assembly Papers. Beijing: Aviation Industry Press, 2010: 819-822(in Chinese). [5] WANG H X, LIU Ch L, CHENG J. UAV recycling technology and its development[J]. Winged Missiles Journal, 2016(1):27-31(in Chinese). [6] FAHLSTROM P, GLEASON T J. Introduction to UAV systems[M].4th ed. New York, USA:John Wiley & Sons Ltd., 2012:1-276. [7] LIU J. Design and implementation of UAV parachute recovery systerm[J]. Command Control and Simulation, 2016, 38(6):109-112(in Chinese). [8] GOODMAN M, MORTIMER R. UAV integration aboard U.S. Navy Ships[EB/OL].[2017-11-07].https://www.researchgate.net/publication/268372474_UAV_Integration_Aboard_US_Navy_Ships. [9] ZHUANG X Y, CHEN Zh B. Current staratus and its developing trend of semiactive laser guided weapon[J]. Ship Electronics Engineering, 2011, 31(6):6-10(in Chinese). [10] LIN Zh H, WU B Y, WANG X B. Research on flight control system of fixed wing UAV crashing rope network recycling technology[J]. China Science and Technology, 2015(11):35(in Chinese). [11] LIU X T, DAI G L. Degren's precision guided weapon and precision guidance control technology[M]. Xi'an:Northwest Industrial University Press, 2009:181-185(in Chinese)。 [12] LIANG W W, HUANG Zh Y, ZHANG W P, et al. Study on error signal of quadrant detectors in laser seekers[J]. Laser Technology, 2014, 38(4):569-573(in Chinese). [13] SUN X Y. A type of UAV autonomous landing section of the recovery[J]. Popular Science and Technology, 2008(4):120-121(in Chinese). [14] CHU Zh F, WANG D F, WANG J F, et al. A laser jamming strategy based on wave gate decoy[J]. Laser Technology, 2016, 40(6):779-781(in Chinese). [15] SHAO X D, YAO H L, ZHANG Sh K, et al. Research of laser guided signal sorting and code recognition technique[J]. Laser Technology, 2011, 35(5):647-651(in Chinese). [16] LIU Ch A. Research on UAV route planning methods[D]. Xi'an: Northwest Industrial University, 2003: 3-15(in Chinese). [17] ZHOU Q. Study for net recovery system of laser guided UAV[J].Journal of Projectiles, Rockets, Missiles and Guidance, 2008, 28(6):300-302(in Chinese). [18] AN J N, YAN H. Analysis on a certain type of UAV parachute recycling process and recycling strategy[J]. Aeronautical Computing Technique, 2014, 44(5):104-107(in Chinese). [19] ZHANG D B, SONG Y H, WANG Q Sh, et al. Error analysis of laser divergence angle measurement[J]. Laser Technology, 2016, 40(6):926-929(in Chinese). -

 点击查看大图
点击查看大图
图(6)
计量
- 文章访问数: 4548
- HTML全文浏览量: 2933
- PDF下载量: 194
- 被引次数: 0
