 网站地图
网站地图

 下载:
下载:
-
海洋是人类赖以生存的生态环境的重要组成部分,也是各类矿产资源的宝藏。对海洋环境、海洋资源的探索和研究,是世界各国的重要战略性发展规划。我国海域辽阔、海岸线漫长,且沿海水域水深较浅、水体浑浊。例如,渤海湾的平均水深为18m左右、最大水深约30m左右,东海、黄海大陆架的大部分水深基本不超过100m,而南海海域约有13×104km2的水体深度在2m~50m之间[1]。对于上述水深较浅的水域范围,中型和大型船舶的安全驶入存在一定的难度。因此,需要寻求一种新的测量方法和技术手段,以有效实现上述海域水体深度的准确测量。
声呐技术是水深测量的传统技术手段,是借助超声波的传播时间实现该处水体深度的测量。在测量作业时,声呐需要搭载在船舶上。然而,当待测水域水深较浅或存在暗礁时,声呐测量技术往往使用受限,测量效率也急剧下降,且存在着严重的安全隐患[2]。从20世纪70年代起,激光技术、多光谱扫描和摄影技术的迅猛发展给海洋测深遥感提供了新的发展思路,但其在一定程度上仍会受到大气环境、海洋环境等动态参量的影响,因而实际测量所得结果往往存在较大误差[3]。
较上述两种水深测量方法而言,机载激光水下探测技术充分发挥了激光技术和空中平台两者的优势,利用特定波长激光在水中的良好穿透特性和低衰减特性,并借助飞机搭载平台,因而能够灵活地测量并获得船舶无法驶入区域的水深数据。机载激光测深技术一经提出,即受到了各国专家学者的广泛关注,并已得到了快速的发展。
-
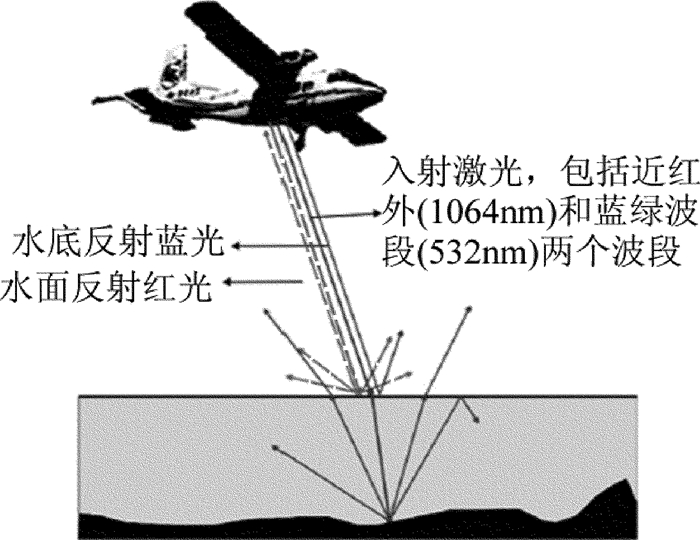
机载激光测深系统的工作原理如图 1所示。系统向海面同时发射波长为1.064μm和波长为0.532μm的两束高功率、窄脉冲激光。其中,波长为1.064μm的红外激光用于测量飞机平台的飞行高度,该束激光在达到空气-海水界面时发生反射,借助其发射和返回系统的时间差可以确定飞机的飞行高度,由于海水中存在着蓝绿激光的穿透窗口,因而测深系统发射的波长为0.532μm的蓝绿激光在海水中衰减系数最小,进入水体和返回接收系统之间的能量损失也最小[4]。其将穿透海水直达海底,在经海底反射后再穿透海水由接收望远镜接收,通过测量该蓝绿激光的发射和返回的时间差就可进一步得到待测海水的深度。
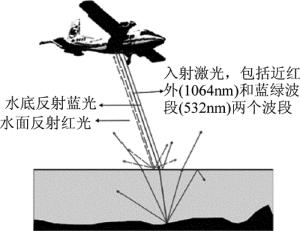
图 1 机载蓝绿激光测深系统工作原理
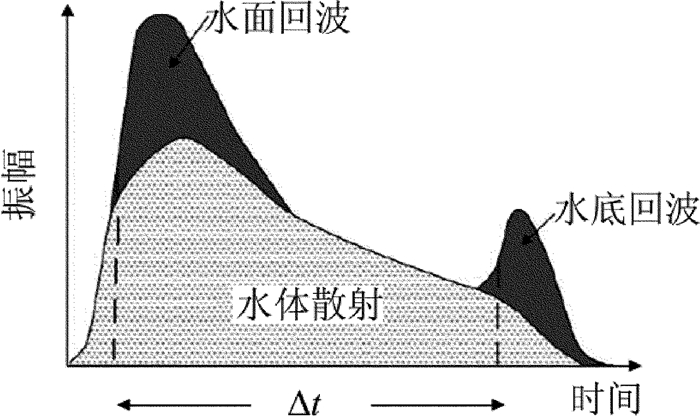
机载激光测深系统接收的回波信号波形如图 2所示。回波信号中有两个峰值,峰值较高的信号是海表面反射的回波信号,峰值较低的信号是由海底反射的,二者之间的时间差为Δt。因此,激光在水中传播所遇到的目标深度D如下式所示:
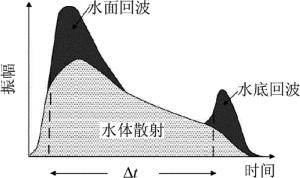
图 2 机载蓝绿激光测深系统接收信号图
$D = \frac{{\Delta r{c_0}\cos \left[ {\arcsin \left( {\sin \frac{\mathit{\theta }}{{{n_{\rm{w}}}}}} \right)} \right]}}{{2{n_{\rm{w}}}}} $
(1) 式中,Δt是海面和海底反射回波信号之间的时间差,c0是真空中的光速,nw是蓝绿激光在海水中的折射率,θ是蓝绿激光的海面入射角[5]。
实际测量中,为获取海水深度,还需排除其它水下目标反射而形成的回波干扰。此外,测量海深的另一难点在于,蓝绿激光穿透水体的过程中会产生一定的后向散射。由于浅水水域中不仅含有大量的水分子,同时还有较多的浮游植物和非藻类悬浮物,因此,海水的后向散射系数较大,甚至出现待测回波光信号被噪声完全淹没的情况。并且,随着蓝绿激光穿透海水的深度不断增加,激光能量却在不断衰减,这也会导致回波信号光极其微弱,甚至造成检测失败。因此,需要采用一定的方法减少后向散射形成的噪声干扰,降低蓝绿激光穿透海水的能量损失,增强回波信号光的能量,防止出现回波信号光被后向散射噪声覆盖的情况。
系统探测距离和激光功率之间的关系如下:
$D = \frac{{2.3}}{T}\lg \left( {\frac{P}{{{P_{{\rm{NE}}}}\frac{S}{N}}}} \right) $
(2) 式中,D是探测距离,即目标深度,T是衰减系数,P是激光发射功率,PNE是探测器的等效噪声功率,S/N是系统信噪比。因此,提高激光的发射功率可有效提高机载激光测深系统的水深探测距离[6],但也在一定程度上增加了系统中激光光源的实现难度。
-
目前,机载激光测深系统常用的数据处理方法有两种:一种是数学近似法,另一种是反卷积法。上述两种方法均可以获得深水数据结果,但在原理和处理过程上有所不同。本文中将对这两种方法的实现原理和研究现状进行介绍和归纳。
-
2006年,WAGNER等人在维也纳借助RIEGL LMS-Q560激光雷达收集到了约2600万个回波信号,并借助高斯校正公式反复校正回波信号的振幅和脉冲宽度,使得回波信号逐渐拟合成为高斯函数,实验表明,该方法拥有较好的拟合效果,拟合精度高达98%[7]。2010年,ALLOUIS等人使用两个高斯函数分别拟合了海面和海底的回波信号,通过拟合波形图可知,回波信号的拟合效果良好[8]。2014年,ABADY等人参考WATER-LIDAR系统的工作性能,获得了两组仿真数据[9]:基于卫星测深雷达系统得到了第1组仿真数据; 基于HawkEye机载激光雷达得到了第2组数据。并且,针对海面和海底回波信号,采用高斯拟合方法进行了拟合;针对水体回波信号,采用四边形函数进行了拟合。实验表明,上述拟合方法准确有效,所得的水深测量值误差较小,与卫星测深雷达系统的误差为6cm,与机载激光雷达的误差为8.2cm。
-
假设机载激光测深系统发射激光穿透海水并返回到接收系统的过程等效于一个卷积过程,则系统回波信号可表示为发射激光和海水后向散射信号的卷积响应与水中其它物质形成的噪声干扰两者的作用之和,如下式所示:
$y\left( t \right) = p\left( t \right) * x\left( t \right) + \mathit{\gamma }\left( t \right) $
(3) 式中,y(t)为回波信号,x(t)为发射激光,p(t)为海水后向散射信号等效的脉冲响应,γ(t)为海水中其它物质的等效噪声,*表示卷积[10]。
1997年,YOUNG等人提出了基于傅里叶变换的反卷积法(Fourier deconvolution, FD),通过计算逆卷积矩阵或脉冲反卷积矩阵达到反卷积的效果,进而对回波信号进行了有效处理[11],但是该方法的反卷积过程稳定性较低且误差较大。2001年,DOUGLASS等人提出了基于正则化的傅里叶反卷积法(Fourier based regularized deconvolution, FRD),该方法虽然能够很好地解决傅里叶反卷积过程中的不稳定问题[12],但处理回波信号所需的约束条件苛刻且在信号边缘估计时误差较大。2002年,NEELAMANI等人提出了一种基于小波算子变换的反卷积方法(wavelet-vaguelette deconvolution, WVD),该方法的反卷积过程稳定且所适用的回波信号范围广[13],但是,其极易受到噪声的干扰,因而反卷积的精度较低。2006年,BAHRAMPOUR等人提出了傅里叶小波正则化的反卷积方法(Fourier wavelet based regularized deconvolution, FWRD),该方法是FRD和WVD两种方法的结合,能够很好地满足大多数回波信号的处理需求且抗噪声干扰能力强[14],但该方法必须充分平衡傅里叶变换和小波的收缩问题。同年,JUTZI和STILLA提出了维纳滤波卷积法(Wiener filter deconvolution, WD),假设信号和噪声相互独立,借助维纳滤波器使估算的目标有效横截面和目标实际有效横截面的均方误差达到了最小[15];虽然该方法取得了较好的回波信号处理效果,但必须需要预先知道相关的噪声参量,且估算参量的准确性会直接影响回波信号有效性的判断。2011年,WU等人将理查德-露西反卷积法(Richardson-Lucy deconvolution, RLD)应用到机载激光测深系统的数据处理中,该反卷积方法是基于贝斯理论并使用迭代的方法实现反卷积的,在上述所有的反卷积方法中具有最好的处理效果[16],但是由于该方法是基于迭代的思路实现反卷积的,因而运行时间较长,数据处理的效率也较低。
-
机载激光测深技术的快速发展,使其应用不仅仅局限于海水深度的测量,在海底地形地貌测绘、水下生物特征探测等领域也已发挥着重要的作用。
-
闭合深度被定义为近岸海域季节性有效波动的向海界限,即波浪所能作用到海底泥沙几乎不运动的最大深水。受海上天气和波浪的长期影响,近海岸的沉积物会随之发生变化,进而海水深度也相应变化,借助机载激光测深技术可以快速、机动的估算得到近海岸的闭合深度以及海水深度的变化,测量更为安全和灵活[17]。
1981年,HALLERMEIER基于线性波动理论给出了有关闭合深度的计算公式[18],如下式所示:
${D_{\rm{c}}} = {a_0}{H_{\rm{e}}} + {a_2}\left( {\frac{{{H_{\rm{e}}}^2}}{{g{T_{\rm{e}}}^2}}} \right) $
(4) 式中,Dc是闭合深度,He是有效波浪高度,Te是有效波浪周期,g是当地重力加速度,a0和a2是通过测量波浪线性回归情况而得到的常系数。1985年,BIRKEMEIR借助所收集的数据验证了上述公式的可行性并发现闭合深度Dc的值偏高[19],为此,采用精度更高的常系数代替原有值。1998年,借助前期积累的大量实验数据,NICHOLLS等人在验证(4)式时发现,长时间运算后,实际闭合深度的增加将慢于上述公式所预测的情况[20]。2007年,ROBERTSON等人测量了佛罗里达半岛东南部地区的海拔高度,通过与2004年调查的数据相比较而求出了闭合深度值;同时发现,由于近海岸区域沉积物存在显著的易变性,因而闭合深度不能仅仅依据海拔的变化而获得[21]。
较传统的水深测量方法,机载激光测深技术不仅具有速度快、效率高、测量范围大的特点,还能到达一些船舶无法驶入的近海区域。2016年,HARTMAN等人基于机载激光测深系统所得的超过600km的沙质海岸的数据,估算得到了相应的闭合深度[17]。同时,还计算出不同环境下深度阈值常量Δhclose和深度比例阈值Rclose的变化范围,为海水深度的准确估算提供了重要依据。此外,还指出,某一特定区域在某一特定时段的闭合深度会受到极端天气(如巨大风浪)的影响,但波浪的陡度对闭合深度基本没有影响。
-
由于水体的浑浊度直接影响测量结果的精确度,因而到目前为止,机载激光测深系统仍主要用于一些水质较好水域的深度测量。其次,水中悬浮物也会导致激光发生散射,造成激光穿透海水时的能量不断的损失,以至于接收系统无法成功接收返回信号,最终无法实现海水深度的有效测量。
针对浑浊水域的水深测量应用,各国学者一直在寻求各种可行的技术手段。2017年,借助雷达系统的回波信号,RICHTER等人首次给出了可描述水体浑浊情况的水体衰减系数,基于该衰减系数,可将回波信号中穿透水体的分量表示如下式所示,并可确定水体浑浊度k的具体数值:
$f\left( x \right) = a \cdot {{\rm{e}}^{\left( { - k \cdot x} \right)}} $
(5) 式中,x是水下距离;a为后向散射系数,k代表水体浑浊度。
在确定了水体浑浊度k之后,可以借助该参量校正回波信号丢失的强度分量。此外,为了补偿传输而引入的能量损失,RICHTER等人对回波信号进行了再次放大,虽然干扰噪声也被同步放大,但是基于他们所提出的衰减校正方法,能够准确区分出有用信号成分并能获得海面和海底回波的分布位置,计算得到该浑浊水域的实际深度[22]。
-
我国机载激光测深技术发展迅速,但仍需不断更新和完善。为了满足实际测量需求,进一步获得低噪声、高精度的测量结果,仍需着重突破以下几个关键技术。
(1) 目前为止,相较其它波段的激光而言,蓝绿激光在海水中的衰减系数最小。但是,衰减系数小并不意味着一定能有效接收到返回信号[23]。激光波长、单脉冲能量、脉冲宽度和重复频率的选择和设定对准确有效地获得回波信号也是十分必要的,因此需要选择合适的激光器作为机载激光测深系统的光源。
(2) 当激光到达海底并从海底反射、再次穿过水体回到大气中时,激光能量已经衰减明显。并且,激光在水体中的传播路径具有一定的不确定性,因此,当激光重新回到大气中时,微弱回波信号会大范围分布在水面上[24]。如何从这些微弱回波信号中有效获取所需的水深信息,是机载激光测深系统实际应用中急需解决的技术问题。
(3) 受到风等天气因素的影响,水面波动会影响水面位置的精确获取,进而影响最终的水深结果测量[25]。因此,雷达系统中波长为1.064μm的红外激光的回波信号处理技术需进一步完善,以克服天气等因素的动态影响,为海水深度的测量提供更加精确的数据。
(4) 对于水深小于2m的极浅水域,机载激光测深系统发射激光的传播速度较快,此时可能出现海面和海底回波信号交叠的现象。并且,水中存在的悬浮物等也会使两个回波信号发生混叠,无法进行有效区分[26]。因此,如何设计相应的信号处理算法,以准确区分海面和海底回波信号、获得真实水深数据,是拓展机载激光测深系统应用范围的又一关键技术问题。
-
机载激光水深测量技术作为一种新型的海洋测深技术,在获取水深数据时具有机动性好、效率高、速度快、成本低等特点。较传统的声呐、遥感等水深探测技术而言,机载激光测深系统的数据获取密度更高,且更为适用于近海和河道等水域的实际测量应用。今后,机载激光水深测量系统会向体积更小、易于安装、水深数据获取更为便捷等方向发展,并将拓展到不同深度、不同浑浊度海域的深度测量领域。其中,有关如何有效克服大气和水下测量环境中的诸多干扰、如何提高测深系统回波信号的提取及处理能力等方向的研究,仍有广阔的发展潜力和空间,其依旧是机载激光测深技术的研究热点和难点,对测深系统测量结果的精确性起着至关重要的作用。在之后的研究中,将采用有限长单位冲激响应滤波器对回波信号处理,并用最小二乘拟合法对过滤后的回波信号进行处理。
机载激光测深技术的研究进展
Research process of airborne laser bathymetry
-
摘要: 机载激光测深技术因其灵活性好、速度快和测量精度高的特点,逐渐取代了传统测量水深的方法,并且在河道、近海海域的水深测量以及水下地形地貌的测绘等方面发挥着重要的作用。对机载激光测深技术进行了介绍,阐述了机载激光测深系统的工作原理及其信号处理的两种主要方法,分别对这两种方法进行了归纳并总结了其最新的应用研究,归纳了我国机载激光测深的关键研究技术,最后对其未来发展方向进行了展望,并说明了今后对回波信号将采用的数据处理方法。Abstract: Because of good flexibility, fast speed and high measurement precision, airborne laser bathymetry technology has gradually replaced the traditional method of measuring the depth of water and plays an important role in depth measurement of water in the river and offshore waters, as well as the mapping of underwater topography and geomorphology. Airborne laser bathymetry technology is introduced. Working principle of airborne laser bathymetry system and two main methods of signal processing are expounded. Two methods and the latest application research are summarized. Key research techniques of airborne laser bathymetry and future development are summed up and prospected. The data processing methods for echo signal in the future are explained.
-
[1] ZHANG L. The air-born blue-green laser radar for water depth information acquisition and processing methods research[D]. Dalian: Dalian Maritime University, 2016: 1-5(in Chinese). [2] YE X S. Research on principle and data processing methods of airborne laser bathymetric technique[D]. Zhengzhou: PLA Information Engincering University, 2010: 1-2(in Chinese). [3] REN L P, ZHAO J Sh, ZHAI G J, et al. Scanning-track computation and analysis for airborne laser depth sounding[J].Geomatics and Information Science of Wuhan University, 2002, 27(2):138-142(in Chinese). [4] ZHAI G J, HUANG M T, OUYANG Y Zh, et al. Key techologies related to the development of airborne laser bathymetry system[J]. Hydrographic Surveying and Charting, 2014, 34(3):73-76(in Ch-inese). [5] YANG H Y, LIANG Y H. Present situation and prospect of the bathymetry technology of airborne blue-green laser system for searching underwater objects[J]. Ome Information, 2013(12):6-10(in Ch-inese). [6] FENG W B. Application in transmission underwater of blue and green laser[J]. Journal of South-Central University for Nationalities(Natural Science Edition), 2000, 19(1):53-55(in Chinese). [7] WAGNER W, ULLRICH A, DUCIC V, et al. Gaussian decomposition calibration of a novel small-footprint full-waveform digitizing airborne laser scanner[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2006, 60(2):100-112. doi: 10.1016/j.isprsjprs.2005.12.001 [8] ALLOUIS T, BAILLY B S, PASTOL Y, et al. Comparison of lidar waveform processing methods for very shallow water bathymetry using Raman, near-infrared and green signals[J]. Earth Surface Processes Land, 2010, 35(6):640-650. [9] ABADY L, BAILLY J S, BAGHDADI N, et al. Column contribution in lidar waveforms on bathymetry estimates[J]. Geoscience and Remote Sensing Letters, 2014, 11(4):813-817. doi: 10.1109/LGRS.2013.2279271 [10] XU G C. Research on airborne lidar waveform data processing and classifying[D]. Nanjing: Najing Forestry University, 2010: 13-17(in Chinese). [11] YOUNG J P, SANG W D, HONG J K. Deconvolution of long-pulse LiDAR signals with matrix formulation[J]. Technical Note Applied Optics, 1997, 36(21):5158-5161. [12] DOUGLASS A R, SCHOEBERL M R, KAWA S R, et al. Acomposite view of ozone evolution in the 1995-1996 northen winter polar vortex develope from airborne LiDAR and satellite observations[J]. Journal of Geophysical Research, 2001, 106(D9):9879-9895. doi: 10.1029/2000JD900590 [13] NEELAMANI R. NOWAK R, BARANIUK R. Model-based inverse halftoning with wavelet-vaguelette deconvolution[J]. International Comference on Image Processing, 2002, 3(3):973-976. [14] BAHRAMPOUR A R, ASKARI A A. Fourier-wavelet regularized deconvolution(ForWaRD) for lidar systems based on TE-CO2 laser[J]. Optics Communications, 2006, 257(1):97-111. doi: 10.1016/j.optcom.2005.07.017 [15] JUTZI B, STILLA U. Range determination with waveform recording laser systems using a Wiener Filter[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2006, 61(2):95-107. doi: 10.1016/j.isprsjprs.2006.09.001 [16] WU J, van AARDT J, ASNER G P. Acomparison of signal deconvolution algorithms based on small-footprint lidar waveform simulation[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(6):2402-2414. doi: 10.1109/TGRS.2010.2103080 [17] HARTMAN M, KENNEDY A B. Depth of closure over large regions using airborne bathymetric lidar[J]. Marine Gology, 2016, 379:52-63. doi: 10.1016/j.margeo.2016.05.012 [18] HALLERMEIER R J. A profile zonation for seasonal sand beaches from wave climate[J]. Coastal Engineering, 1981, 4(3):253-277. [19] BIRKEMEIER W A. Field data on seaward limit of profile change[J]. Waterway Ports Harbor Coastal Ocean Engineering ASCE, 1985, 111(3):598-602. doi: 10.1061/(ASCE)0733-950X(1985)111:3(598) [20] NICHOLLS R J, BIRKEMEIER W A, LEE G H. Evaluation of depth of closure using data from Duck, NC, USA[J]. Marine Geology, 1998, 148(1):179-201. [21] ROBERTSON W, ZHANG K, WHITMAN D. Hurricane-induced beach change derived from airborne laser measurements near Panama City, Florida[J]. Marine Geology, 2007, 237(3):191-205. [22] RICHTER K, MAAS H G, WESTFELD P, et al. An approach to determining turbidity and correcting for signal attenuation in airborne lidar bathymetry[J].PFG-Journal of Photogrammetry Remote Sensing & Geoinformation Science, 2017, 85(1):31-40. [23] WANG Z H. Research and application of laser technique in navy[J]. Optoelectronic Technology and Information, 1998, 11(6):29-34(in Chinese). [24] ZHU X, YANG K Ch, XU Q Y, et al. Airborne laser bathymetry phenomenological LiDAR equation[J]. Chinese Journal of Lasers, 1996, 22(3):273-278(in Chinese). [25] HUANG M T, ZHAI G J, OUYANG Y Zh, et al. Wave correction in airborne laser hydrography[J]. Geomatics and Information Science of Wuhan University, 2003, 28(4):389-392(in Chinese). [26] WANG Y. Current status and development of airborne laser bathymetry technology[J]. Journal of Geomatics, 2014, 39(3):39-43(in Chinese). -

 点击查看大图
点击查看大图
图(2)
计量
- 文章访问数: 6301
- HTML全文浏览量: 4810
- PDF下载量: 244
- 被引次数: 0
